Open Journal of Optimization
Vol.03 No.01(2014), Article ID:44334,10 pages
10.4236/ojop.2014.31001
Optimal Control of an Elliptic System under Conjugation Conditions Involving Schrödinger Operator
Ahmed Mohammed Abdallah
Department of Basic Science, Higher Technological Institute, Tenth of Ramadan City, Egypt
Email: abdallaham6236@yahoo.com
Copyright © 2014 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 2 January 2014; revised 19 February 2014; accepted 4 March 2014
ABSTRACT
The purpose of this paper is to study the optimal control of the n × n cooperative elliptic system with variable coefficients under conjugation conditions and mixed boundary condition involving Schrödinger operator defined on . By using Green’s formula, properties of the first Eigen values and Lax-Milgram lemma, we prove the existence and uniqueness of solutions for these Systems. We also study the necessary and sufficient conditions for having a maximum principle and existence of solution for the given linear elliptic system.
. By using Green’s formula, properties of the first Eigen values and Lax-Milgram lemma, we prove the existence and uniqueness of solutions for these Systems. We also study the necessary and sufficient conditions for having a maximum principle and existence of solution for the given linear elliptic system.
Keywords:
Elliptic Systems; Existence and Uniqueness of Solutions; Conjugation Conditions; Mixed Boundary Condition; Schrödinger Operator; Optimal Control

1. Introduction
The necessary and sufficient conditions of optimality for systems governed by elliptic operators have been studi- ed by Lions in [1] . Optimal control problems of distributed systems that include partial differential equations have many mechanical sources and a variety of technological and scientific applications. Much optimal control problems of elliptic systems involving Schrödinger operators have been studied in [2] [3] . The linear quadratic optimal control problem described by a distributed parameter system has a variety of mechanical and technical sources and applications. In this paper, we obtain some necessary (sufficient) conditions for the validity of ma- ximum principle cooperative elliptic systems.
2. Distributed Control of an Elliptic System with Conjugation Conditions Involving Schrödinger Operator
2.1. The Case of 2 × 2 Elliptic Systems with Conjugation Condition and Mixed Boundary Condition
In this section, we consider the following 2 × 2 elliptic system (see [3] [4] )
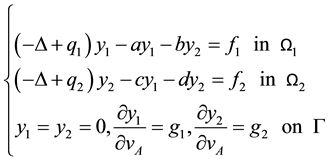 (1)
(1)
where  on Γ,
on Γ,  = K-the direction cosine of v, v being the normal on the Γ exterior to Ω and
= K-the direction cosine of v, v being the normal on the Γ exterior to Ω and ,
, 
 ,
,  and conjugation conditions (*)
and conjugation conditions (*)

 ,
,
where Ω is an open subset of  with smooth boundary
with smooth boundary  is Schrödinger operator,
is Schrödinger operator, 
 . The giv-
. The giv-
en elliptic equation is specified in bounded, continuous and strictly Lipschitz domains in .
.
2.1.1. Existence and Uniqueness of Solution
Since , Then we have chain of the form
, Then we have chain of the form ,
,
we define the following bilinear form on 

Lemma 1(see [3] )
Let ,
,  in system (1) satisfy
in system (1) satisfy ,
,  ,
, 
Lemma 2(see [3] )
First Eigen values  characterized by
characterized by 
For  and
and  and by lax-Milgram lemma, we prove that:
and by lax-Milgram lemma, we prove that:
Theorem 1
For , there exists a unique solution
, there exists a unique solution  of system (1). Proof
of system (1). Proof
The bilinear form can be written as

We choose m large enough such that a + m > 0 and d + m > 0 and the equivalent norm


By Cauchy Schwartz and Lemma 1 and 2 in the paper
 (2)
(2)
 and
and  is continuous on
is continuous on  then by Lax-Milgram lemma there exist a unique solu-
then by Lax-Milgram lemma there exist a unique solu-
tion , such that
, such that  for all
for all .
.
2.1.2. Formulation of the Control Problem
Let  being the space of controls.
being the space of controls.
The energy functional
 (3)
(3)
A unique state , where
, where  is a set of the sobolev functions
is a set of the sobolev functions
are specified on domain  to every control
to every control . For a control
. For a control  the state of the system y
the state of the system y  is given by the solution of the following system:
is given by the solution of the following system:
 (4)
(4)
The observation equation is given by .
.
The cost functional is given by:
 (5)
(5)
where ,
,  is hermitian positive definite operator defined on
is hermitian positive definite operator defined on
 such that:
such that:
 (6)
(6)
The control problem then is to find:
 ,
,
where  is a closed convex subset from
is a closed convex subset from , since the cost function (5) can be written as
, since the cost function (5) can be written as

where
 ,
,
Assume that (2), (6) hold. The cost function being given (5), necessary and sufficient for u to be an optimal control is that the following equations and inequalities be satisfied
 (7)
(7)
 is the adjoint state.
is the adjoint state.
Outline of proof
Since  is differentiable and
is differentiable and  is bounded, then the optimal control u are characterized by
is bounded, then the optimal control u are characterized by  which is equivalent to
which is equivalent to
 (8)
(8)
Since  where A is defined by:
where A is defined by:

then 
By Green’s formula or derivative in the sense of distribution

where  then
then ,
,  is transpose of M,
is transpose of M,
 adjoint state
adjoint state , (8) is equivalent to
, (8) is equivalent to


From (7), we obtain

Remark 1
Generalization to n × n systems

and conjugation conditions


 ,
,
where  is an open subset of
is an open subset of  with smooth boundary
with smooth boundary , A is n × n diagonal matrix of Schrödinger operator
, A is n × n diagonal matrix of Schrödinger operator ,
,  is an
is an  matrix,
matrix, 
 = K-the direction cosine of v, v being the normal on the Γ exterior to Ω,
= K-the direction cosine of v, v being the normal on the Γ exterior to Ω,

In this case, the bilinear form is given by:

The linear form is given by:

The cost functional is given by:


where  in
in ,
,  ,
,  is hermitian positive definite operator defined
is hermitian positive definite operator defined
on  such that:
such that:

In this case the necessary and sufficient for u to be an optimal control is that the following equations and inequalities be satisfied.

 ,
,  is transpose of M.
is transpose of M.
If constraints are absent i.e. when  the equality
the equality  then the differential
then the differential
problem of finding the vector-function 
 (9)
(9)
We can find last relations at  as the same at the beginning of the paper.
as the same at the beginning of the paper.
We can choose  (as a special case) then get distributed control of cooperative elliptic systems involving Laplace operator [5] .
(as a special case) then get distributed control of cooperative elliptic systems involving Laplace operator [5] .
3. Boundary Control of an Elliptic System with Conjugation Conditions Involving Schrödinger Operator
Formulation of the Control Problem
Let  being the space of controls.
being the space of controls.
For a control  the state of the system
the state of the system  is given by the solution of the following system:
is given by the solution of the following system:
 (10)
(10)
The observation equation is given by .
.
Since the cost function (5) can be written as:

where

since  is continuous on
is continuous on  then there exist a unique optimal control
then there exist a unique optimal control  [1] . The function y is specified, minimizes the energy functional [6] . Moreover, we have the following theorem which gives the characterization of the optimal control u:
[1] . The function y is specified, minimizes the energy functional [6] . Moreover, we have the following theorem which gives the characterization of the optimal control u:
The necessary and sufficient for u to be an optimal control is that the following equations and inequalities be satisfied
 (11)
(11)
 is the adjoint state.
is the adjoint state.
Outline of proof
Since J(v) is differentiable and Uad is bounded then the optimal control u is characterized 
 which is equivalent to
which is equivalent to
 (12)
(12)
Since  where A is defined by:
where A is defined by:

then

By Green’s formula or derivative in the sense of distribution

where  then
then ,
,


From (6), we obtain

We can add the control in the part of Dirichlet condition, i.e.
 (13)
(13)
The difference appears in characterization

Remark 2
Generalization to n × n systems

and conjugation conditions

 ,
,
where Ω is an open subset of  with smooth boundary Γ, A is an n × n diagonal matrix of Laplace operator
with smooth boundary Γ, A is an n × n diagonal matrix of Laplace operator
 is an
is an  matrix
matrix
 = K-the direction cosine of v, v being the normal at Γ ex-
= K-the direction cosine of v, v being the normal at Γ ex-
terior to Ω,
 and.
and.
In this case, the bilinear form is given by:

The linear form is given by .
.
The cost functional is given by:

 ,
,
where  in
in ,
,  ,
,  is hermitian positive definite operator defined
is hermitian positive definite operator defined
on  such that:
such that:
 .
.
In this case the necessary and sufficient for u to be an optimal control is that the following equations and inequalities be satisfied.
 (11)
(11)
 ,
,  = transpose of M.
= transpose of M.
If constraints are absent i.e. when  the equality
the equality  then the differential
then the differential
problem of finding the vector-function , that satisfies the relations
, that satisfies the relations
 (12)
(12)
We can find last relations at n = 2 and q = 0 [7] .
4. Conclusion
The aim is to find the existence and uniqueness of solution (state of the system) and necessary and sufficient condition for optimality of the system in 2 × 2 and generalization to n × n in the case of distributed and bounda- ry control. In this paper, we connect [3] with [4] to get a new work with following the developments.
References
- Lions, J.L. (1971) Optimal Control of a System Governed by Partial Differential Equations. Springer-Verlag Band, New York. http://dx.doi.org/10.1007/978-3-642-65024-6
- Serag, H.M. (2000) Distributed Control for Cooperative Systems Governed by Schrödinger Operator. Journal of Discrete Mathematical Science and Cryptography, 3, 227-234. http://dx.doi.org/10.1080/09720529.2000.10697910
- Serag, H.M. and Qamlo, A.H. (2005) On Elliptic Systems Involving Schrodinger Operators. The Mediterranean Journal of Measurement and Control, 1, 91-96.
- Deineka, V.S. and Sergienko, I.V. (2004) Optimal Control of an Elliptic System with Conjugation Conditions and Neu- mann Boundary Conditions. Cybernetics and Systems Analysis, 40, 865-882. http://dx.doi.org/10.1007/s10559-005-0026-7
- Gali, I.M. and Serag, H.M. (1994) Distributed Control of Cooperative Elliptic Systems, the UAB. Georgeatrch International Conference on D.E. and Mathematical Physics, Birmingham, 1994.
- Deineka, V.S. and Sergienko, I.V. (2001) Models and Methods for Problem Solution in Heterogeneous Media. Kyiv (in Russian), Naukova Dumka.
- Qamlo, A.H. and Bahaa, G.M. (2013) Boundary Control for 2 × 2 Elliptic Systems with Conjugation Condition. Intelligent Control and Automation, 4, 280-286.