 American Journal of Computational Mathematics, 2011, 1, 318-327 doi:10.4236/ajcm.2011.14038 Published Online December 2011 (http://www.SciRP.org/journal/ajcm) Copyright © 2011 SciRes. AJCM A New Fourth Order Difference Approximation for the Solution of Three-Dimensional Non-Linear Biharmonic Equations Using Coupled Approach Ranjan Kumar Mohanty1, Mahinder Kumar Jain2*, Biranchi Narayan Mishra3# 1Department of Mat hem at i cs, Faculty of Mathematical Sciences, University of Delhi, Delhi, India 2Department of Mat hem at i cs, Indian Institute of Technology, New Delhi, Indi a 3Department of Mat hem at i cs, Utkal University, Bhubaneswar, India E-mail: rmohanty@maths.du.ac.in, bn_misramath@hotmail.com Received October 13, 2011; revised November 2, 2011; accepted November 9, 2011 Abstract This paper deals with a new higher order compact difference scheme, which is, O(h4) using coupled ap- proach on the 19-point 3D stencil for the solution of three dimensional nonlinear biharmonic equations. At each internal grid point, the solution u(x, y, z) and its Laplacian 2u are obtained. The resulting stencil al- gorithm is presented and hence this new algorithm can be easily incorporated to solve many problems. The present discretization allows us to use the Dirichlet boundary conditions only and there is no need to discre- tize the derivative boundary conditions near the boundary. We also show that special treatment is required to handle the boundary conditions. Convergence analysis for a model problem is briefly discussed. The method is tested on three problems and compares very favourably with the corresponding second order approxima- tion which we also discuss using coupled approach. Keywords: Three-Dimensional Non-Linear Biharmonic Equation, Finite Differences, Fourth Order Accuracy, Compact Discretization, Block-Block-Tridiagonal, Tangential Derivatives, Laplacian, Stream Function, Reynolds Number 1. Introduction We are interested to develop a new algorithm for solving the three-dimensional non-linear biharmonic partial dif- ferential equation 444 4 444 444 2222 22 22 22 ,, 2 ,,,, ,,,,,, 0,,1 yzx y z uuu uxyz xyz uuu xy yz zx xyzuu uuuuuu xyx (1) defined in the solution region ,, 0,,1xyz xyz with boundary , where 222 2 22 ,, uu uxyz mensional Laplacians of u in . We assume that the solution u(x, y, z) is smooth enough to maintain the order and accuracy of the algorithm as high as possible under consideration. The Dirichlet boundary conditions are given by 2 12 2 ,, ,,, , ,, u ufxyzfxyz xyz n . (2) The nonlinear biharmonic equation is a fourth order elliptic partial differential equation which occurs in many areas of physics and applied mathematics, especially in elasticity theory and stokes flow problems. It occurs with fluid flowing over an obstacle or with the movement of a natural or artificial body. Common examples are the flows past an airplane, a submarine, an automobile, or wind blowing past a high-rise building. Till about three and half decades ago, second order accuracy was consid- ered to be sufficient for most biharmonic problems. In particular, the central difference schemes have been the most popular ones because of their straightforwardness 2 u yz represents the three di- *Present address: 4076, C/4, Vasant Kunj, New Delhi, India. #Present address: Department of Mathematics, Rajasunakhala College, ayagarh, Orissa, India.  R. K. MOHANTY ET AL.319 in application. Though for problems having well behaved solutions, the solution may be of poor quality for con- vection dominated flows, or for high Reynolds number if the mesh is not sufficiently refined. Again, higher order discretization is generally associated with non-compact stencil which increase the band-width of the resultant coefficient matrix. Both mesh refinement and increased matrix band-width invariably lead to a large number of arithmetic operations. Thus neither a lower order accu- rate method on a fine mesh nor a higher order accurate one on a non-compact stencil seems to be computation- ally cost-effective. This is where higher order compact (HOC) finite difference methods become important. A compact finite difference schemes is one which utilizes grid points located only directly adjacent to the node about which differences are taken. In addition, if the scheme has an accuracy greater than two, it is termed as HOC method. The higher order accuracy of the HOC methods combined with the compactness of the differ- ence stencils yields highly accurate numerical solutions on relatively coarser grids with greater computational efficiency. A compact difference scheme is one that is restricted to the patch of cells immediately surrounding any given node and does not extend further. Most stan- dard difference schemes such as the central difference scheme for second order elliptic partial differential equa- tions are compact. The high order compact method con- sidered here is different in that the governing differential equation is used to approximate the lower order deriva- tive terms with the imbedding technique. The scheme is difficult to develop due to the need for extensive alge- braic manipulation, especially for non-linear problems. However, once high-order method developed, it can be incorporated easily in application. Various approaches for the numerical solution of 2D biharmonic problems has been discussed in the literature. Not many authors have tried to solve the three-dimensional biharmonic problems. The reason is that for high order approxima- tion it is difficult to discretize the nonlinear biharmonic equation as well as the associated boundary conditions using a single computational cell. Another reason of ne- cessity is that three-dimensional problems require large computing power and place huge amount of memory requirements on the computational systems. Such com- puting power has only recently begun to become avail- able for academic research. Smith [1] and Ehrlich [2,3] have used coupled approach and solved 2D biharmonic equation using second order accurate finite difference equations. Bauer and Riess [4] have used block iterative method to solve block 5-diagonal matrices for the solu- tion of 2D biharmonic problem of first kind. Glowinski and Pironneau [5] have developed a stable lower order numerical method for the first biharmonic problem. Later, kwon et al. [6], Stephenson [7], and Mohanty et al. [8-12] have developed certain second- and fourth-order finite difference methods for the solution of two and three di- mensional biharmonic problems using single compact cells. Recently, using more grid points Singh et al [13] and Khattar et al. [14] have discussed the fourth order numerical methods for the solution of 2D and 3D bihar- monic problems of second kind. Further, using coupled approach Mohanty [15] has derived a new nine point fourth order finite difference method for the solution of non-linear biharmonic problems of second kind. In most recently, using nine point compact cell Mohanty et al. [16] have discussed fourth order finite difference method for the solution of nonlinear 2D triharmonic problems. Ear- lier, Mohanty et al. [17-19] have developed fourth order compact difference schemes for the solution of multi- dimensional non-linear elliptic partial differential equa- tions. Fourth order compact difference schemes have become quite popular as against the other lower order accurate schemes which require high mesh refinement and hence are computationally inefficient. On the other hand, the higher order accuracy of the fourth order com- pact methods combined with the compactness of the dif- ference stencil yields highly accurate numerical solutions on relatively coarser grids with greater computational efficiency. A conventional approach for solving the 3D biharmonic equation is to discretize the differential Equa- tion (1) on a uniform grid using 125-point approxima- tions with truncation error of order . This approxima- tion connect the values of central point in terms of 124 neighbouring values of u in 55 cubic grid. We note that the central value of u is connected to grid points two grids away in each direction from the central point and the difference approximations needs to be modified at grid points near the boundaries. There are serious computational difficulties with solution of the linear and non-linear systems obtained through 125-point discreti- zation of the 3D biharmonic equation. Approximations using compact cells avoid these difficulties. The compact approach involves discretizing the biharmonic equations using not just the grid values of the unknown solution u but also the values of the derivatives 2 h 5 x, u y and u z at selected grid points (see Mohanty and Pandey [10]). It is required to solve the system of four equations to obtain the solutions of u , x uu, y and u z u. In this paper, we write the original differential equation in a coupled man- ner and introduce new concepts to handle the boundary conditions without discretizing them. For fourth order approximations we use only 19-point compact cell (see Figure 1). No approximations for derivatives need to be carried out at the boundaries and the given Dirichlet boundary conditions are exactly satisfied. The main ad- vantage of this work is that we require to solve a system of two equations, whereas in our previous work [10], we were required to solve a system of four equations to ob- Copyright © 2011 SciRes. AJCM 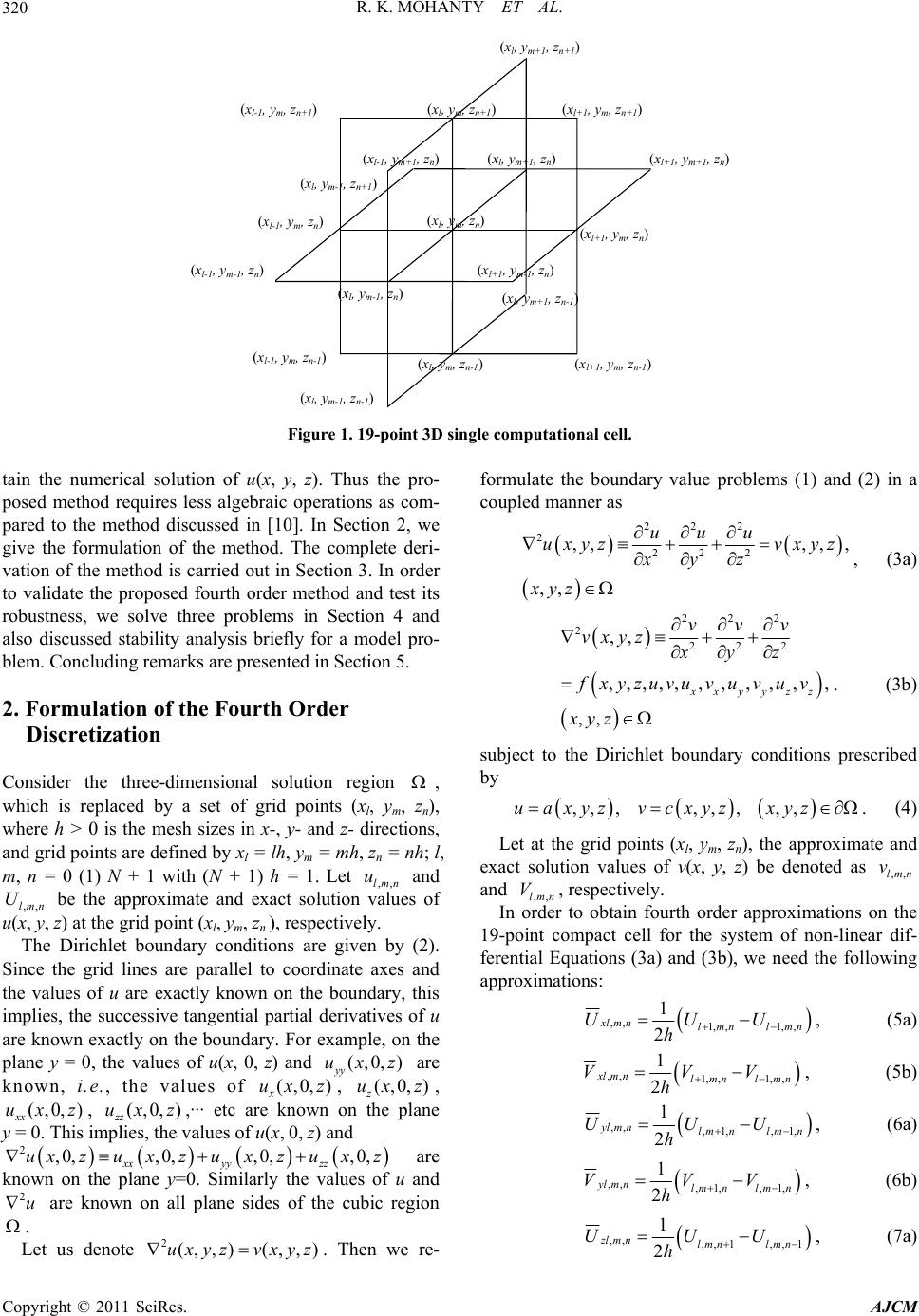 R. K. MOHANTY ET AL. Copyright © 2011 SciRes. AJCM 320 ( l , y m+1 , n+1 ) (x l+1 , y m , z n+1 ) (x l-1 , y m , z n+1 ) (x l-1 , y m , z n-1 ) (x l+1 , y m , z n-1 ) (x l , y m-1 , z n-1 ) (x l+1 , y m+1 , z n ) (x l-1 , y m+1 , z n ) (x l , y m-1 , z n+1 ) (x l-1 , y m , z n ) (x l-1 , y m-1 , z n ) (x l+1 , y m-1 , z n ) (x l , y m , z n-1 ) (x l , y m+1 , z n-1 ) (x l , y m , z n ) (x l , y m , z n+1 ) (x l , y m-1 , z n ) (x l+1 , y m , z n ) (x l , y m+1 , z n ) Figure 1. 19-point 3D single computational cell. tain the numerical solution of u(x, y, z). Thus the pro- posed method requires less algebraic operations as com- pared to the method discussed in [10]. In Section 2, we give the formulation of the method. The complete deri- vation of the method is carried out in Section 3. In order to validate the proposed fourth order method and test its robustness, we solve three problems in Section 4 and also discussed stability analysis briefly for a model pro- blem. Concluding remarks are presented in Section 5. 2. Formulation of the Fourth Order Discretization Consider the three-dimensional solution region , which is replaced by a set of grid points (xl, ym, zn), where h > 0 is the mesh sizes in x-, y- and z- directions, and grid points are defined by xl = lh, ym = mh, zn = nh; l, m, n = 0 (1) N + 1 with (N + 1) h = 1. Let ,,lmn and ,,lmn be the approximate and exact solution values of u(x, y, z) at the grid point (xl, ym, zn ), respectively. u U The Dirichlet boundary conditions are given by (2). Since the grid lines are parallel to coordinate axes and the values of u are exactly known on the boundary, this implies, the successive tangential partial derivatives of u are known exactly on the boundary. For example, on the plane y = 0, the values of u(x, 0, z) and are known, i.e., the values of x ux , , , ,··· etc are known on the plane (,0,) yy uxz ,)z(,0 z ux(,0 ,)z (,0,) xx ux z(,0,) zz ux z y = 0. This implies, the values of u(x, 0, z) and 2, 0,, 0,, 0,,0, xx yy zz ux zux z uxz ux z 2u are known on the plane y=0. Similarly the values of u and are known on all plane sides of the cubic region . Let us denote . Then we re- formulate the boundary value problems (1) and (2) in a coupled manner as 2(, ,)(, ,)uxyz vxyz 222 2 222 ,,,, , ,, uuu uxyz vxyz xyz xyz , (3a) 222 2 222 ,, ,,,,,, ,,, ,, ,, xxyyzz vvv vxyz xyz xyzuvu v uvu v xyz . (3b) subject to the Dirichlet boundary conditions prescribed by ,, ,,, ,,,uaxyzv cxyzxyz . (4) Let at the grid points (xl, ym, zn), the approximate and exact solution values of v(x, y, z) be denoted as and , respectively. ,,lmn v ,,lmn In order to obtain fourth order approximations on the 19-point compact cell for the system of non-linear dif- ferential Equations (3a) and (3b), we need the following approximations: V ,, 1, ,1, , 1 2 xlm nlmn lmn UUU h , (5a) ,, 1, ,1, , 1 2 xl m nlmn lmn VVV h , (5b) ,, ,1, ,1, 1 2 yl m nlm nlm n UUU h , (6a) ,, ,1, ,1, 1 2 ylm nlm nlm n VVV h , (6b) ,, ,, 1,, 1 1 2 zl m nlmn lmn UUU h , (7a)  R. K. MOHANTY ET AL.321 ,, ,, 1,, 1 1 2 zl m nlmn lmn VVV h , (7b) 1, ,1, ,, ,1, , 134 2 xlm nlmnlmn lmn UUUU h , (8a) 1, ,1, ,,,1, , 134 2 xlm nlmnlmn lmn VVVV h , (8b) ,1, 1, 1,1, 1, 1 2 xl mnlmnlmn UUU h , (9a) ,1,1, 1,1, 1, 1 2 xl mnlmnlmn VVV h , (9b) ,, 11,,11, ,1 1 2 xlm nlmn lmn UUU h , (10a) ,, 11,,11, ,1 1 2 xlm nlmn lmn VVV h , (10b) 1, ,1,1,1, 1, 1 2 ylm nlmnlmn UUU h , (11a) 1, ,1, 1,1, 1, 1 2 ylm nlmnlmn VVV h , (11b) ,1, ,1,,, ,1, 134 2 yl mnlm nlmnlmn UUUU h , (12a) ,1, ,1,,, ,1, 134 2 yl mnlm nlmnlm n VVVV h , (12b) ,, 1,1,1 ,1,1 1 2 yl m nlmnlm n UUU h , (13a) ,, 1,1,1 ,1,1 1 2 ylm nlm nlm n VVV h , (13b) 1, ,1,,11, ,1 1 2 zlm nlmnlmn UUU h , (14a) 1, ,1, ,11, ,1 1 2 zlm nlmnlmn VVV h , (14b) ,1, ,1,1,1,1 1 2 zl mnlmnlm n UUU h , (15a) ,1,,1,1 ,1,1 1 2 zl mnlmnlm n VVV h , (15b) ,, 1,, 1,,,, 1 134 2 zlmnlmnlmn lmn UUUU h , (16a) ,, 1,, 1,,,, 1 134 2 zl m nlmnlmn lmn VVVV h , (16b) ,1, 1,1,,1,1,1, 2 12 xxl mnlmnlmn lmn UUUU h , (17a) ,1, 1, 1,, 1,1, 1, 2 12 xxl mnlmnlmnlmn VVVV h , (17b) ,, 11,, 1,, 11,, 1 2 12 xxl m nlmnlmn lmn UUUU h , (18a) ,, 11,, 1,, 11,, 1 2 12 xxl m nlmnlmn lmn VVVV h , (18b) 1, ,1,1,1, ,1,1, 2 12 yylm nlmnlmn lmn UUUU h , (19a) 1, ,1,1,1,,1,1, 2 12 yylm nlmnlmn lmn VVVV h , (19b) ,, 1,1,1,,1 ,1,1 2 12 yylm nlm nlmnlm n UUUU h , (20a) ,, 1,1,1,,1 ,1,1 2 12 yylm nlm nlmnlm n VVVV h , (20b) 1, ,1,,11, ,1,,1 2 12 zzlm nlmnlmn lmn UUUU h , (21a) 1, ,1, ,11,,1, ,1 2 12 zzlm nlmnlmnlmn VVVV h , (21b) ,1,,1,1,1, ,1,1 2 12 zzl mnlm nlm nlm n UUUU h , (22a) ,1, ,1,1,1, ,1,1 2 12 zzl mnlm nlm nlmn VVVV h . (22b) Then we need to evaluate 1, ,1, ,1, ,1, ,1, ,1, ,1, , 11,,1,, ,,,, ,,,,,, lmn lmn xlmnylmnylmnzlmn zlmn lmnlmnlmn FfxyzUVUVUVUV (23) ,1,,1, ,1,,1,,1,,1, ,1, 1,1,,1, ,,,, ,,,,,, lm n lm nxlmnylm nylm nzlm nzlmn lmnlmnlmn FfxyzUVUVUVUV (24) ,, 1,,1,,1,,1,, 1,, 1,, 1 1,,1,,1 ,, ,,,,,,,, lmn xlmn xlmnylmnylmnzlmn zlmn lmnlmn lmn FfxyzUVUVUVUV (25) Further, we define ,, ,,1,,1,,1,,1,, 1, ,1, , 12 1212 lmnxlmnyyl mnyyl mnzzlmnzzl mn lmn lmn hh h UUVVUUU U (26a) 1, ,1, , ,, ,,1,,1,,1,,1,, 12 1212 lmn lmn lmnxlmnyyl mnyyl mnzzlmnzzl mn hh h VVFFVVVV (26b) Copyright © 2011 SciRes. AJCM  R. K. MOHANTY ET AL. 322 ,,,,, 1,, 1,, 1,, 1, ,1,,1, 12 1212 lmnylmnxxlm nxxlm nzzlm nzzlm n lm nlmn hh h UUVVU UU U (27a) ,1,,1, ,,,,, 1,, 1,,1,, 1, 12 1212 lm nlm n lmnylmnxxlm nxxlmnzzlmnzzlm n hh h VVFFVVVV (27b) ,,,,,, 1,, 1,, 1,, 1 ,, 1,,1 12 1212 zlmn zlmnxxlmnxxlmnyylmnyylmn lmn lmn hh h UUVVU UUU (28a) ,, 1,, 1 ,,,,,, 1,, 1,, 1,, 1 12 1212 lmn lmn zlmn zlmnxxlmnxxlmnyylmnyylmn hh h VVFFVVVV (28b) Finally, let ,, ,,,,,,,,,, ,, ,, ,, ,,,, ,,,,,, lmn lmn xlmnylmn ylmnzlmn zlmn lmn lmnlmn FfxyzUVUVUVUV (29) Then at each internal grid point (xl, ym, zn) of the solu- tion region , the given system of differential Equa- tions (3) are discretized by ,1, 11,, 1,, 11,, 1,1, 11,1,,1,1,1,1,, , ,1,,1,1,,1,1,1,,1,11, ,1, ,11, ,1,1, 22 24 222 lm nlmnlmnlmnlm nlm nlm nl m nl mn lmnl mnl m nlm nlm nlm nlmnlmnlmnlm LUU UUUU UUUU UUUUU U UUU U 2 1 2 6 1,,1,, ,1, ,1,,,1,,1,, 6() 2 ,, 11 n lmnlmn lmn lmnlmnlmnlmn hVVVVVVVOh lmn N (30a) ,1, 11,, 1,, 11,, 1,1, 11,1,,1,1,1,1,,,, 1,,1, 1,, 1,1, 1,, 1,11,,1,,11,,1, 1, 22 22 2 lmnlmnlmnlmnlmnlmnlmnlmnlmnlm l mnlmnlmnlmnlmnlmnlmnlmnlm LVV VVV V VVVVV VVVV V VVV V 224 n 1 2 1,,1,, ,1, ,1, ,,1,,1,,,, 6, 2 ,,11 n lmn lmn lmn lmn lmnlmnlmnlmn hFFFFFFFT lmn N (30b) where 6 ,,lmn TOh. Note that, the approximations (30a) and (30b) require only 19-grid points with a single computational cell. Incorporating the Dirichlet boundary conditions given by (4) into the difference methods (30a) and (30b), we obtain the sparse system of tri-block-block diagonal matrix equations in coupled form, which can be solved by appropriate iterative methods (see [20-24]). 3. Derivation of the Fourth Order Approximations At the grid point ,, lmn yz, let us denote (1)(2) (1)(2) ,,,, ,,,, ,, ,,,, ,, (1) (2) ,, ,, ,, ,, ,,,, , ijk ijklmnlmn lmnlmn ijk xlm nxl m nyl m nylm n lm n lmn lmn zl mnzlmn Ufff UUVUVxy z ff UV , f (31) Further, at the grid point ,, lmn yz, we define ,,,, ,,,,,,,,,,,,,, ,,,, ,,,,,, lmnlm nlmn lmnxlmnxlmnylmnylmnzlmnzlmn FfxyzUVUVUVUV (32) Using Taylor expansion about the grid point ,, lmn yz, we first obtain 2 6 1,,1,,,1,,1, ,,1,,1,, 6 2lmn lmn lmn lmnlmnlmnlmn h LVFFFFFFFOh (33) Copyright © 2011 SciRes. AJCM  R. K. MOHANTY ET AL. Copyright © 2011 SciRes. AJCM 323 Now by the help of the approximations (8a)-(16b), from (23)-(25), we obtain 2 3 1, ,1, ,1 6 lmn lmn h FTO h , (34) 2 3 ,1,,1, 2 6 lm nlm nh FTO h , (35) 2 3 ,, 1,, 13 6 lmn lmnh FTO h . (36) where (1)(2) (1) 1300, ,300, ,030, , (2)(1) (2) 030, ,003, ,003,, 22 lmnlmn lmn lmnlmn lmn TUV U VUV , (1)(2 )(1) 2300 ,,300 ,,030 ,, (2)(1) (2) 030, ,003, ,003, , 2 2 lmn lmnlmn lmnlmnlmn TU VU VUV (1) (2)(1) , 3300, ,300, ,030,, (2)(1) (2) 030, ,003, ,003, , 22 lmn lmnlmn lmnlmnlmn TUV U VUV . Let us consider the linear combination ,,,, 111, ,1, , 1, ,1, , 12 1, ,1,, 13 xlmn xlmnlmn lmn yylm nyylm n zzlm nzzlm n UUhaVV ha UU ha UU (37a) 1, ,1, , ,,,, 11 1, ,1, , 12 1, ,1,, 13 lmn lmn xlmn xlmn yylm nyylm n zzlm nzzlm n VVhbF F hb VV hb VV , (37b) ,,,, 21, 1,,1, ,1,,1, 22 ,1,,1, 23 ylm nyl m nlm nlm n xxl mnxxl mn zzl mnzzl mn UUhaVV ha UU ha UU , (38a) ,1,,1, ,,,, 21 ,1,,1, 22 ,1,,1, 23 lm nlm n ylm nylm n xxl mnxxl mn zzl mnzzl mn VVhbFF hb VV hb VV , (38b) ,,,, 31, ,1, ,1 ,, 1,, 1 32 ,, 1,, 1 33 zl mnzlmnlmn lmn xxlm nxxlm n yylm nyylm n UUhaVV ha UU ha UU , (39a) ,, 1,, 1 ,,,, 31 ,, 1,, 1 32 ,, 1,,1 33 lmn lmn zl m nzl m n xxlm nxxlm n yylm nyylm n VVhbF F hb VV hb VV (39b) where and i, j = 1, 2, 3 are parameters to be determ. Now using the approximations (5a)-(7b), (1 and (34)-(36), from (37a)-(39b), we obtain ij a ined ij b; 7a)-(22b) 4 ,, ,, 4 6 xlm nxl m n UU TOh , (40a) 2 h 2 4 ,, ,,5 6 xlm nxlm nh VV TOh , (40b) 2 4 ,, ,, 6 6 ylm nylm nh UU TOh , (41a) 2 4 ,, ,, 7 6 ylm nyl m nh VV TOh , (41b) 2 4 ,, ,, 8 6 zl m nzl m nh UU TOh , (42a) . (42b) 2 4 ,, ,, 9 6 zl m nzl m nh VV TOh where 411 3001112 120 1113102 112 12 12 TaUaa aaU , U 11 3001112 1201113 102 112 1212TbVbbVbb , V 5 621 0302122210 2123 012 112 12 12 TaUaa aaU U , 72103021 2221021 23012 112 1212TbVbbVbb V, 831 0033132201 3133 021 112 12 12 TaUaa aaU U , 931003313220131 33021 112 1212TbVbbVbb V By the help of the approximations (40a)-(42b), from (29), we get . 2 4 ,, ,, 10 6 lmn lmn h FTO h (43 w ly, by the help of the relations (34)-(36) and (43), 0b) and (33), we obtain the local truncation error ) here 1 0 T (1)(2) (1)(2) 4,, 5,, 6,,7,, (1) (2) 8,,9,, lmn lmnlmnlmn lmn lmn TT T T TT . Final from (3 4 6 ,, 123 10 3 6 lmn h TTTTTO h (44) The proposed difference methods (30a) and (30b) are to be of 4 Oh , the coefficient of 4 h in (44) must be zero and obtain a relation we  R. K. MOHANTY ET AL. 324 Substituting the values of and in (45), e val 123 10 30TTT T (45) 1 T, 23 ,TT 10 T we obtain thues of parameters 11 1 12 i ab for i = 1, 2, 3 and i 1 ab for 12 ij iji = 1, 2, th 3 and j = 2, 3, and e local truncation error (44) reduces to 6 ,lm TOh . We may summarize the results as fo , n llows: int finite di methods (30a) and (30b) with the approximations listed of the non-li- t boundar co (46) the ab Theorem 1: The compact 19-pofference in (5a)-(29) are of 4for the numerical solutions of Oh ,,uxyzand its Laplacian near biharmonic Equation (1) with Diriy 2,,uxyz chle nditions (2). 4. Stability Consideration and Results of Computational Experiments Let us consider the test equation 4 ,,,, ,0,,1uxyz Gxyzxyz Applying the proposed method (30a) and (30b) to ove equation, we obtain , 1,11,,1,, 2 lm nlmnlm UU U 1 1,,1 ,1,11,1,,1,1,1, ,1,1 1,,1 ,, 11,, 1,1, 1 2 22 42 2 nl mn lm nlmnlm nl m n lm nlmn lmn lmnlmn U UU UU UUUU UUU 1, ,,,1, ,1,1, ,1, 1,1, 2 lm nlmnlmn lmn lm nl m n UU UU 2 1, ,1, ,,1,,1, ,, 1,,1,, [ 2 6] ,, 11 lmnlmnlmnlmn lmn lmnlmn hVVVV VV V lmnN (47a) ,1, 11,, 1,,11,, 1 , 1,11, 1,, 1,1, 1, 1, ,,,1, ,1,1, ,1,1,1,,1,1 1,,1 ,, 11,, 1,1, 1 2 2 2242 2 2 lm nlmnlmnlmn lmnlmnlmn lmn lmnlmnlmn lmn lm nl m nlmnl mn lmn lmn lmn VV VV VV VV VVVV VV V V VV V 2 1, ,1, ,,1,,1, ,, 1,, 1,, 2 6 ,, 11 lmnlmnlmnlm lmn lmnlmn hGGGG GG G lmn N n (47b) where , ... etc. An ) and (47b) can be written as ,, ,, lmnlm n GGxyz iterative method for (47a 2 k+1 kk 24= 2 h IuAuBvRHU k+1 kk 24= Iv0u+ AvRHV kk (48b) where are solution vectors and RHU, RHV are righe vectors consists of boundary and ho- mogenous function values. Above iterative method in matrix form can be written as ,uv t hand sid k+1 k k+1 k UU GR VV H (49) where 2 1,RH . 2 h 24 RHU AB G= We denote I = [0, 1, 0] as the Nth order and H = [1, 2, 1] and Q = [2, 0, 2] as Nth o nal matrices, and C = [I, H, I] and D = [H Nth order block-tridiagonal matrices, whe te RHV 0A identity matrix rder tridiago- , Q, H] as the re, in general, we deno bc ,, NN abc abc ab ab c 0 0 as Nth given by order tridiagonal matrix whose eigen values are π 2cos ,1,2, 1 j bacj N N . (50) The eigenvalues of I, H and Q are 1(N-times), 22cosπkhand 4 cos πkh, 11kN respectively, where (N + 1)h = 1. The eigenvalues of C and D are given by 22cosπcos π;, 11 jk jhkh jkN (51a) and 4cos πcos π)cosπcos π ,11 jk jhkhjh kh jk N (51b) The matrix A = [C, D, C] associated with the iteration matrix G is a Nth order block-block-tridiagonal matrix whose eigenvalues are given by 2cosπ;, ,11 ijk jkjkih ijkN or, 4cos πcosπ cos πcos πcos π; ih jh khkh ih πcosπcosπ cos πcos ijk khih jh jh (48a) ,, 11ijkN (52) Copyright © 2011 SciRes. AJCM  R. K. MOHANTY ET AL. Copyright © 2011 SciRes. AJCM 325 Similarly, the eigenvalues of the matrix B as iteration matrix G are given by where Gis the spectral radius of G. sociated The cteristic equation of the matrix G is given by with the 62cosπcos πcos π; ,, 11 ijk ihjh kh ijkN harac 2 1 24 48 1 (53) 24 ijk 0 Thus the eigenvalues of G are given by det0;,,11 h ijkijk ijkN (54) The iterative method (49) is stable as long as 1 G, πcos πcos πcos πcos πcos π;ihjhjhkhkh ih (55) The maximum values of all eigenvalues of Gccur at . Hence, 11 246 cos πcosπcos πcos ijkijk ihjh kh o 1jk i cos π max .1cosπ1 2 ijk hh G, (56) which is satisfied for all variable angles πh. Hence the ite the system of differential Equations (3a) and (3b) are straightforward and can be written in a coupled manner (57a) rative method (48a)-(48b) is stable. The second order approximations for 24 ,,1,1,1,,,,1,, ,1, ,,1,, 6, ,, 11 lmnlmn lmnlmnlmn lmn lmnlmn UUUUUUU hVOh lmn N ,, ,, ,, 11 lm n lmnlmn lmn N ,,1,1,1,,,,1,, ,1, ,,1 2 4 ,, ,,,,,,,,,, 6 ,,,, ,,,,,, lmnlmn lmnlmn lmnlmn lmn xlmnxlmnylmnylmnzlmn zlmn VVV VVVV hf xyzUVUVUVUVOh (57b) Note that, the second order approximations (57a) and (57b) require only 7-grid points on a single co tional cell (see Figure 1). By combining the difference equations at each internal grid points, we obtain a large sparse system of matrix to solve. At each interior mesh point, we have two un- knowns u and , that is, the number of bands with non-zero enincreased, and so is the size of the final matrix for the same mesh size. However, by this new method, the value of the Laplacian, which is often of interest, is also computed. Whenever mputa- 2uv tries is ,,,,,,,,, , xyyzz xyzuvu v uv u v is linear (or, non-linear) in ,,, , x uvu v ,, yz uvu andz v, the difference Equations (30a) and (30b) form a linear (or, non-linear) system. To solve such a system or indeed to de double precision arithmetic. Test Problem 1: (Biharmonic problem) calculated maximum absolute errors (l-norm) for dif- ferent grid sizes. All computations were performed using 4444 44 u 444 222222 2 ,, ,0,,1 uuuu u yz xyyzzx Gxyzxyz (58) The exact solution is ,, 1cos2π1cos2π1cos2πuxyzx y z. The maximum absolute errors are tabulated in Table 1. Table 1. Test Problem 1: The maximum absolute errors. h 4-methodOh 2-methodOh 1/8 U 2u 0.1065(–01) 0.6145(+00) 0.1089(–01) 0.2932(+02) 1/16 U 2u 0.6659(–03) 0.3776(–01) 0.2614(+00) 0.7121(+0 monstrate the existence of a solution, we use iterative methods. In this section, we solve the following three test problems in the region 0 < x, y, z < 1, whose exact solu- tions are known. The Dirichlet boundary conditions and right hand side homogeneous functions are obtained by using the exact solutions. We have also compared the numerical results obtained by proposed fourth order ap- proximations (30a) and (30b) with the numerical results ob o1) U tained by cximations (57a) and (57b). In allered (0) u0 as the initial approximation and the iterations were stopped when the absolute error tolerance rresponding second order appro cases, we have consid 112 10 kk uu was achieved. In all cases, we have 1/32 2u 0.2349(v02) 0.1767(+01) 1/64 U 2u 0.4157(–04) 0.6469(–01) 0.2586(–05) 0.1466(–03) 0.1611(–01) 0.4410(+00) 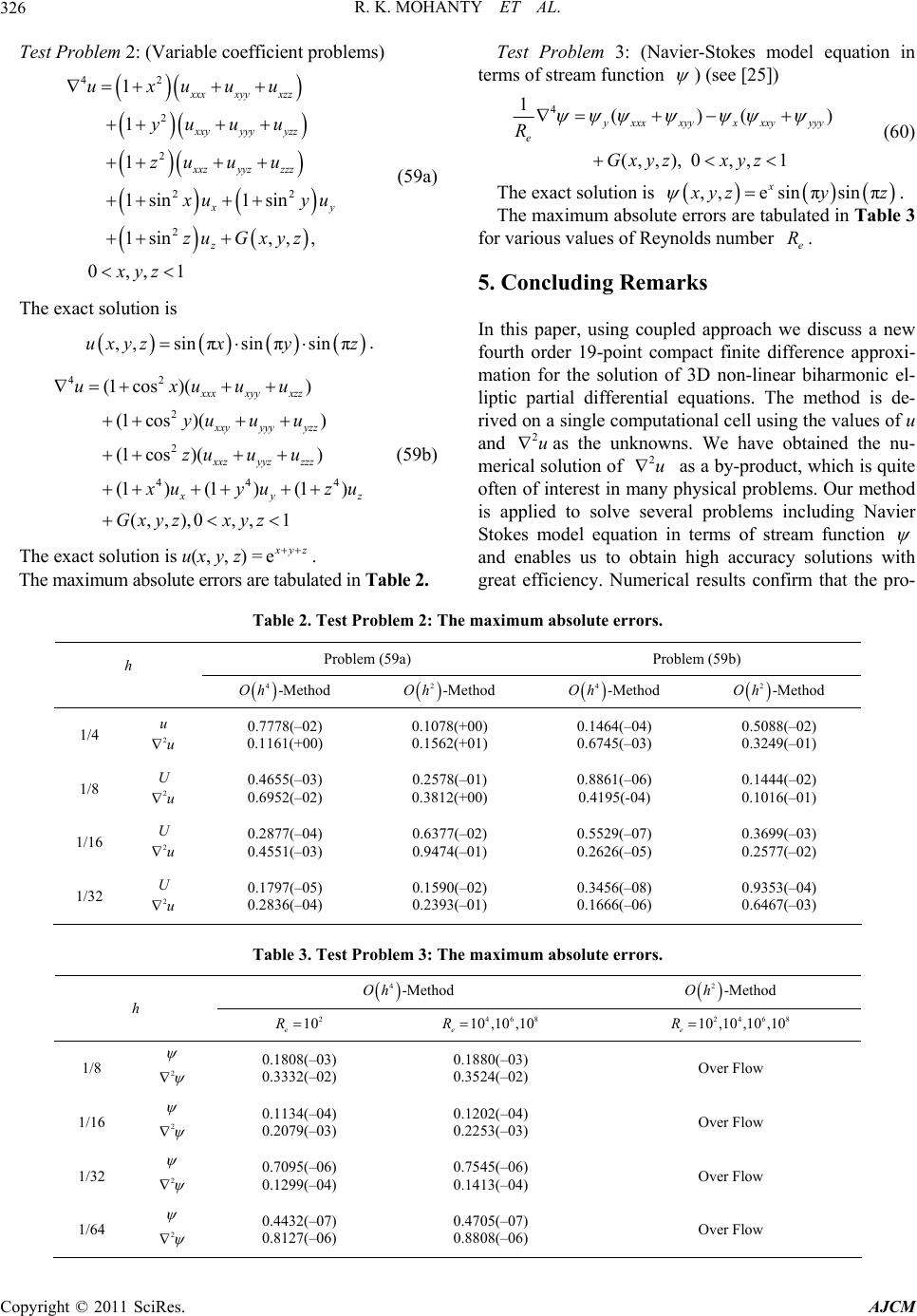 R. K. MOHANTY ET AL. 326 blems) 2 Test Problem 2: (Variable coefficient pro 42 2 2 2 1 1 1 1sin 1sin,, , xxx xyy xzz xxy yyy yzz xxz yyz zzz 2 1s in 0,,1 y z uxuuu yu u u zu u u uy zu Gxyz u (59a) The exact solution is xyz ,, sinπsin πsin πuxyzx y z. 42 44 (1 cos)() (1 co (1 cos)() (1) (1 (,,1 xxx xyy xzz yyy yzz xxz yyz zzz 2 s)( xxy 2 4 ) ) ) (1 ,),0 , yz uxuuu u u zu u u yu uy u Gxy z zu z xy (59b) The exact solution is u(x, y, z) =e yz . re tabulaThe m Test Problem 3: (Navier-Stokes model equation in terms of stream function ) (see [25]) 4 1()( (, ,),0, ,1 ) xxxxyyx xxyyyy e R Gxyz xyz (60) The exact solution is ,, esinπsin π x yzy z . The maximum absolute errors are tabulated in Table 3 for various values of Reynolds number . e R 5. Concluding Remarks In this paper, using coupled approach we discuss a new fourth order 19-point compact finite difference approxi- mation for the solution of 3D non-linear biharmonic el- liptic partial differential equations. The method is de- rived on a single computational cell using the values of u and 2u as the unknowns. We have obtained the nu- merical solution of 2u as a by-product, which is quite often of interest in many physical problems. Our method is applied to solve several problems including Navier Stokes model equation in terms of stream function and enables us to obtain high accuracy solutions with great efficiency. Numerical results confirm that the pro- axm absoae 2. imulute errors ted in Tabl em 2: The maximum absolute errors. Problem (59a) Problem (59b) Table 2. Test Probl h 4-MethodOh 2-MethodOh 4-Met ho dOh 2-Met ho dOh 1/4 u 0.7778(–02) 0.1161(+00) 0.1078(+00) +01) 0.1464(–04) 0.6745(–03) 0.5088(–02) 0.3249(–01) 2u 0.1562( 1/8 U 0.4655(–03) 0.6952(–02) 0.2578(–01) 0.3812(+00) 0.8861(–06) 0.4195(-04) 0.1444(–02) 0.1016(–01) 1/16 U 0.2877(–04) 0.4551(–03) 0.6377(–02) 0.9474(–01) 0.5529(–07) 0.2626(–05) 0.3699(–03) 0.2577(–02) 0.1797(–05) 0.2836(–04) 0.1590(–02) 0.2393(–01) 0.3456(–08) 0.1666(–06) 0.9353(–04) 0.6467(–03) 2u 2u 1/32 U 2u Table 3. Test Problem 3: The maximum absolute errors. 4-Met ho dOh 2-Met ho dOh h 2 10 e R 468 10 ,10 ,10 e R 2468 10 ,10 ,10 ,10 e R 2 0.1808(–03) 0.3332(–02) 0.1880(–03) 0.3524(–02) Over Flow 1/8 1/16 2 0.2079(–0 0.1134(–04) 3) 0.1202(–04) 0.2253(–03) Over Flow 1/32 2 0.7095(–06) 0.1299(–04) 0.7545(–06) 1413(–04) Over Flow 1/64 0. 2 0.4432(–07) 0.8127(–0 0.4705(–07) 0.8808(–06) w 6) Over Flo Copyright © 2011 SciRes. AJCM  R. K. MOHANTY ET AL.327 posed fourth order method produces oscillation free so- lution for large Reynolds number, whereas the second or- der method is unstable. 6. References [1] J. Smith, “The pled Equation Approach to the Nu- merical Solution of the Bihaation by F Differences,” SIAM Journal on Analysis, V 7, No. 1, 1970, p04-111. doi:10.1137/0707005 Cou rmonic Equ Numerical inite ol. p. 1 [2] L. W. Solving the Buation as C pled Finite Difference Equations,” SIAM Journal on Nu- merical Analysis, Vol. 8, No. 2 doi:10.1137/0708029 Ehrlich, “iharmonic Eqou- , 1971, pp. 278-287. [3] L. W. EhrlichPoint and Block SOR Applied to a Cou- pled Set of Difference Equations,” Computing, Vol. 12, No. 3, 1974, pp. 181-194. doi:10.1007/BF02293104 , “ [4] L. Band E. L. Riess, “Bloconal Matrices and thst Numerical Solutionrmonic Equa- tion,” Mathematics of Computation, Vol. 26, No. 118, 1972, pp. 311-326. doi:10.1 90/S00250312751-9 uer a e Fa k Five Diag of the Biha 0 -5718-1972- [5] R. Glowinski and O. Pironneau, the First Biharmonic EquationsTwo-Dimen- sional Stokes Problems,” SIAM l. 21, No. 2, 1979, pp. 167-212. doi:10.1137/1021028 “Numerical Methods for and for the Review, Vo [6] Y. Kwon, R. Manohar and J. W., “Single Cell Fourth Order Methodn,” Con- armonic Problems,” Journal of Com- , No. 1, 1984, pp. 65-80. 21-9991(84)90015-9 Stephenson armonic Equatios for the Bih gress Numerantium, Vol. 34, 1982, pp. 475-482. [7] J. W. Stephenson, “Single Cell Discretization of Order Two and Four for Bih putational Physics, Vol. 55 doi:10.1016/00 y and P. K. Pandey, “Difference Methods of [8] R. K. Mohant Order Two and Four for Systems of Mildly Non-linear Biharmonic Problems of Second Kind in Two Space Di- mensions,” Numerical Methods for Partial Differential Equations, Vol. 12, No. 6, 1996, pp. 707-717. doi:10.1002/(SICI)1098-2426(199611)12:6<707::AID-N UM4>3.0.CO;2-W [9] R. K. Mohanty, M. K. Jain and P. K. Pandey, “Finite Dif- ference Methods of Order Two and Four for 2D Non ear Biharmonic Probl lin- ems of First Kind,” International Journal of Computer Mathematic s, Vol. 61, No. 1-2, 1996, pp. 155-163. doi:10.1080/00207169608804507 R. K. Mohanty and P. K. Pandey, “Families of Acc[10] urate Discretizations of Order Two and Four for 3D Mildly Nonlinear Biharmonic Problems of Second Kind,” Inter- national Journal of Computer Mathematics, Vol. 68, No. 3-4, 1998, pp. 363-380. doi:10.1080/00207169808804702 [11] D. J. Evans and R. K. Mohanty, “Block Iterative Methods for the Numerical Solution of Two-Dimensional Nonlin- ear Biharmonic Equations,” International Journal of C om- puter Mathematics, Vol. 69, No. 3-4, 1998, pp. 371-390. doi:10.1080/00207169808804729 [12] R. K. Mohanty, D. J. Evans and P. K. Pandey, “Block Ite- rative Methods for the Numerical Solution of Three Di- First Kind,” International Journal of Computer Mathe- matics, Vol. 77, No. 2, 2001, pp. 319-332. doi:10.1 010880506 mensional Mildly Nonlinear Biharmonic Problems of 080/0020716 8 [13] S. Singh and R. K. A New Cou- pled Ap Accuracy Nethod for the Solutioninear Biharions,” Neural Parallel and, 2009, pp. 239-256 ] D. Khattar, S. Singh and R. K. A New Cou- pled Approachcy Numethod for the Solution-Linear Bihuations,” Ap- plied Mnd Compu 215, No. 8, 2009, pp. 3036-3044. doi:10.1016/j.amc.2009.09.052 , D. KhattarMohanty, “ proach High umerical M of 2D Nonl Scientific Computations monic Equat , Vol. 17 . [14 Mohanty, “ High Accuraerical M of 3D Non athematics aarmonic Eq tations, Vol. w High Accuracy Finite Difference Discretization for the Solution of 2D Non-Linear Bihar- monic Equations Using Coupled Approach,” Numerical Methods for Partial Differential Equations, Vol. 26, No. 4, 2010, pp. 931-944. doi:10.1002/num.204605 [15] R. K. Mohanty, “A Ne Mohanty, M. K. Ja. Mishra, “A Com- t Discretization of O(h) for Two-Dimensional Non- ear Triharmonic Equations,” Physica Scripta, Vol. 84, . 2, 2011, pp. 025002. /0031-8949/84/02/025002 [16] R. K. pac in and B. N 4 lin No doi:10.1088 K. Mohanty and S. Deyell Fourth Order Dif- ence Approximations for ( u/ x), ( u/ y) and ( u/ z) the Three Dimensional Quasi-Linear Elliptic Equation,” merical Methods for fferential Equations, , No. 5, 2000, pp. 417-425. [17] R. , “Single C fer of Nu Vol. 16 Partial Di doi:10.1002/1098-2426(200009)16:5<417::AID-NUM1> 3.0.CO;2-S [18] R. K. Mohanty, S. Karaa and U. Arora, “Fourth Order Nine artial Differential Equations,” Nume- Point Unequal Mesh Discretization for the Solution of 2D Non-Linear Elliptic Partial Differential Equations,” Neu- ral Parallel and Scientific Computations, Vol. 14, 2006, pp. 453-470. [19] R. K. Mohanty and S. Singh, “A New Highly Accurate Dis- cretization for Three Dimensional Singularly Perturbed Non-linear Elliptic P rical Methods for Partial Differential Equations, Vol. 22, No. 6, 2006, pp. 1379-1395. doi:10.1002/num.20160 [20] L. A. Hageman and D. M. Young, “Applied Iterative Me- thods,” Dover Publications, New York, 2004. [21] M. K. Jain, “Numerical Solution of Differential Equa- tions,” 2nd Edition, John Wiley, New Delhi, 1984. [22] C. T. Kelly, “Iterative Methods for Linear and Non-Linear Equations,” SIAM Publications, Philadelphia, 1995. [23] Y. Saad, “Iterative Methods for Sparse Linear Systems,” SIAM Publications, Philadelphia, 2003. doi:10.1137/1.9780898718003 [24] G. Meurant, “Computer Solution of Large Linear Systems,” North-Holland, Amsterdam, 1999. [25] W. F. Spotz and G. F. Carey, “High Order Compact Scheme for the Steady Stream-Function Vorticity Equations,” In- ternational Journal for Numerical Methods in Enginee- ring, Vol. 38, No. 20, 1995, pp. 3497-3512. doi:10.1002/nme.1620382008 Copyright © 2011 SciRes. AJCM
|