 American Journal of Computational Mathematics, 2011, 1, 226-234 doi:10.4236/ajcm.2011.14026 Published Online December 2011 (http://www.SciRP.org/journal/ajcm) Copyright © 2011 SciRes. AJCM Solution of the Generalized Abel Integral Equation by Using Almost Bernstein Operational Matrix Sandeep Dixit1, Rajesh K. Pandey2, Sunil Kumar1, Om P. Singh1 1Department of Applied Mathematics, Institute of Technology, Banaras Hindu University, Varanasi, India 2PDPM Indian Institute of Information Technology, Design and Manufacturing, Jabalpur, India E-mail: {singhom, skiitbhu}@gmail.com, {opsingh.apm, sdixit.rs.apm}@itbhu.ac.in, rkpandeyy@iiitdmj.ac.in Received June 12, 2011; revised July 5, 2011; accepted July 15, 2011 Abstract A direct almost Bernstein operational matrix of integration is used to propose a stable algorithm for numeri- cal inversion of the generalized Abel integral equation. The applicability of the earlier proposed methods was restricted to the numerical inversion of a part of the generalized Abel integral equation. The method is quite accurate and stable as illustrated by applying it to intensity data with and without random noise to invert and compare it with the known analytical inverse. Thus it is a good method for applying to experimental intensi- ties distorted by noise. Keywords: Abel Inversion, Bernstein Polynomials, Almost Bernstein Operational Matrix of Integration, Noise Resistance 1. Introduction Abel’s integral equation [1] occurs in many branches of science. Usually, physical quantities accessible to meas- urement are quite often related to physically important but experimentally inaccessible ones by Abel’s integral equa- tion. Some of the examples are: microscopy [2], seis- mology [3,4], radio astronomy [5], satellite photometry of airglows [6], electron emission [7], atomic scattering [8], radar ranging [9], and optical fiber evaluation [10-12]. But it is most extensively used in flame and plasma di- agnostics [13-15] and X-ray radiography [16-19]. Recently, Chakrabarti [20] employed a direct function theoretic method to determine the closed form solution of the following generalized Abel integral equation dd , 01, , x x tt tt axbxf x xt tx x (1) where the coefficients and do not vanish simultaneously. ax bx Earlier the generalized Abel equation (1) was exam- ined in Gakhov’s book [21], under the special assump- tions that the coefficients and satisfy Hol- der’s condition in ax bx , , whereas the forcing term x and the unknown function belong to those class of functions which admit representations of the form * * 1 , 0, fxxxf x x xxx (2) where * x possesses a Holder continuous derivative in , and * satisfies Holder’s condition in , . The method of Gakhov’s has a particular disadvantage in the sense that while solving a singular equation that involves integrals only with weak singularity of the type 0tx 1 1 tx , occurrence of strongly singular integrals involving Cauchy type singularities of the type has to be permitted [20,21]. Chakrabarti [20] obtained the solution involving only weakly singular integrals of the Abel type and thus Cauchy type singular integrals were avoided. But the numerical inversion is still needed for its application in physical models since the experimental data for the intensity x is avail- able only at a discrete set of points and it may also be distorted by noise. The aim of the present paper is to propose a new stable algorithm for the numerical inversion of Abel’s integral equation (1), based on the newly constructed almost Bernstein operational matrices of integration. Numerical examples are given to illustrate the accuracy and stability 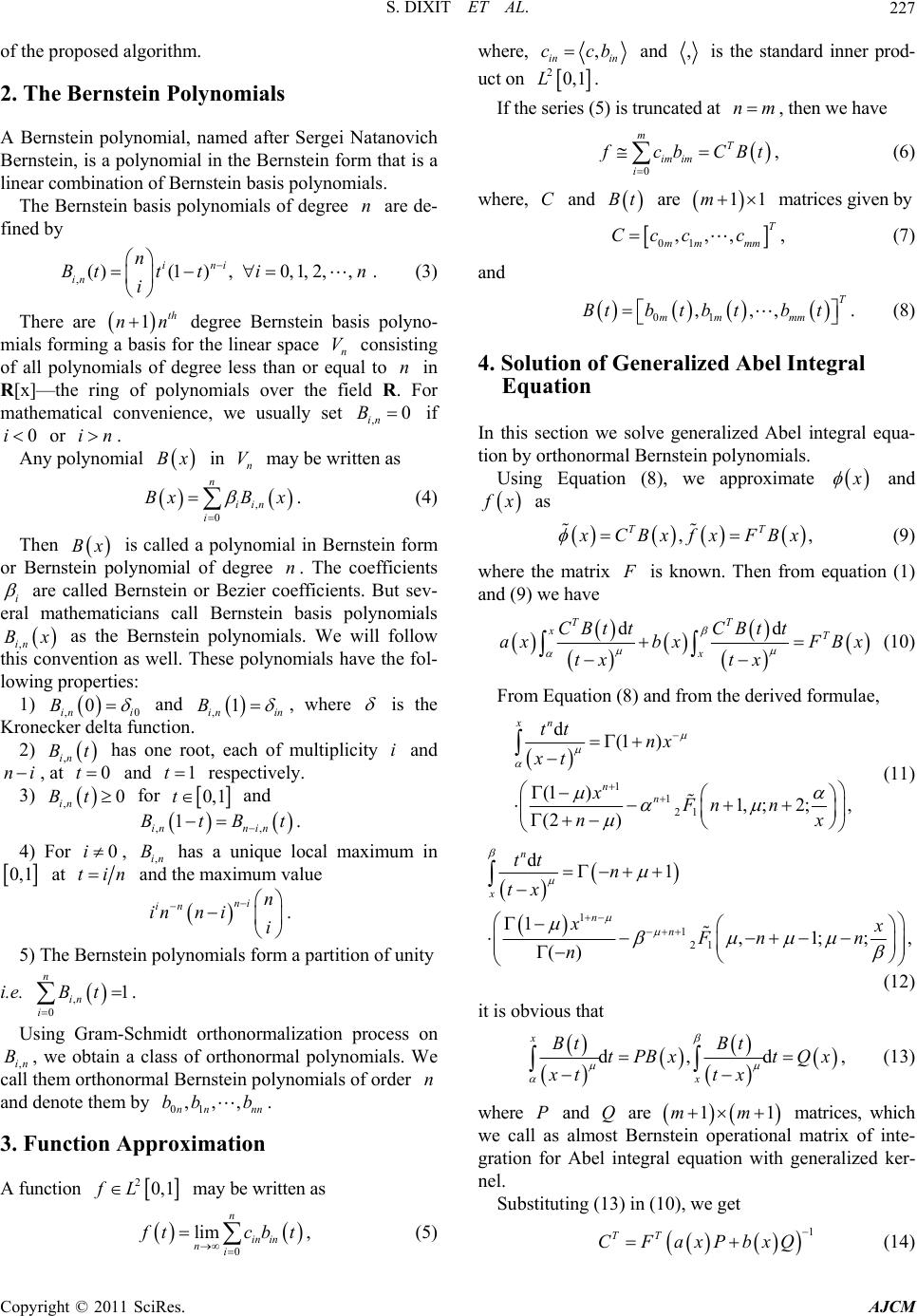 S. DIXIT ET AL.227 of the proposed algorithm. 2. The Bernstein Polynomials A Bernstein polynomial, named after Sergei Natanovich Bernstein, is a polynomial in the Bernstein form that is a linear combination of Bernstein basis polynomials. The Bernstein basis polynomials of degree are de- fined by n ,()(1) ,0,1,2,, ini in n Btt tin i . (3) There are degree Bernstein basis polyno- mials forming a basis for the linear space n consisting of all polynomials of degree less than or equal to in R[x]—the ring of polynomials over the field R. For mathematical convenience, we usually set 1th nnVn 0 ,in B if or . 0iin Any polynomial in may be written as Bx n V , 0 n iin i BxB x . (4) Then is called a polynomial in Bernstein form or Bernstein polynomial of degree . The coefficients i Bx n are called Bernstein or Bezier coefficients. But sev- eral mathematicians call Bernstein basis polynomials as the Bernstein polynomials. We will follow this convention as well. These polynomials have the fol- lowing properties: x ,in B 1) ,0 0 in i B and ,1 in in B , where is the Kronecker delta function. 2) has one root, each of multiplicity and , at and respectively. ,in Bt i0ti n1t 3) for ,0 in Bt 0,1t 1Bt and ,,inn in B t. 4) For , ,in has a unique local maximum in 0iB 0,1 at tin and the maximum value ni in n innii . 5) The Bernstein polynomials form a partition of unity i.e. . , 0 1 n in i Bt Using Gram-Schmidt orthonormalization process on ,in, we obtain a class of orthonormal polynomials. We call them orthonormal Bernstein polynomials of order and denote them by . Bn 01 ,,, nn nn bb b 3. Function Approximation A function 20,1fL may be written as 0 lim n in in ni tcb where, , in in ccb and , is the standard inner prod- uct on 20,1L. If the series (5) is truncated at , then we have nm 0 mT im im i cb CBt , (6) where, and C Bt are matrices given by 11m T 01 ,,, , mm mm Ccc c (7) and 01 ,,, T mm mm Btbtbtbt . (8) 4. Solution of Generalized Abel Integral Equation In this section we solve generalized Abel integral equa- tion by orthonormal Bernstein polynomials. Using Equation (8), we approximate and x as ,, TT CBxf xFBx (9) where the matrix is known. Then from equation (1) and (9) we have dd TT xT x CBt tCBt t ax bxFBx tx tx (10) From Equation (8) and from the derived formulae, 1 1 21 d(1 ) (1 )1, ;2;, (2 ) xn nn tt nx xt xFn n nx (11) 1 1 21 d1 1,1;; () n x nn tt n tx xx Fnn n , (12) it is obvious that d,d x x Bt Bt tPBx tQx xt tx , (13) where and are PQ 1mm1 matrices, which we call as almost Bernstein operational matrix of inte- gration for Abel integral equation with generalized ker- nel. Substituting (13) in (10), we get t, (5) 1 TT CFaxPbxQ (14) Copyright © 2011 SciRes. AJCM 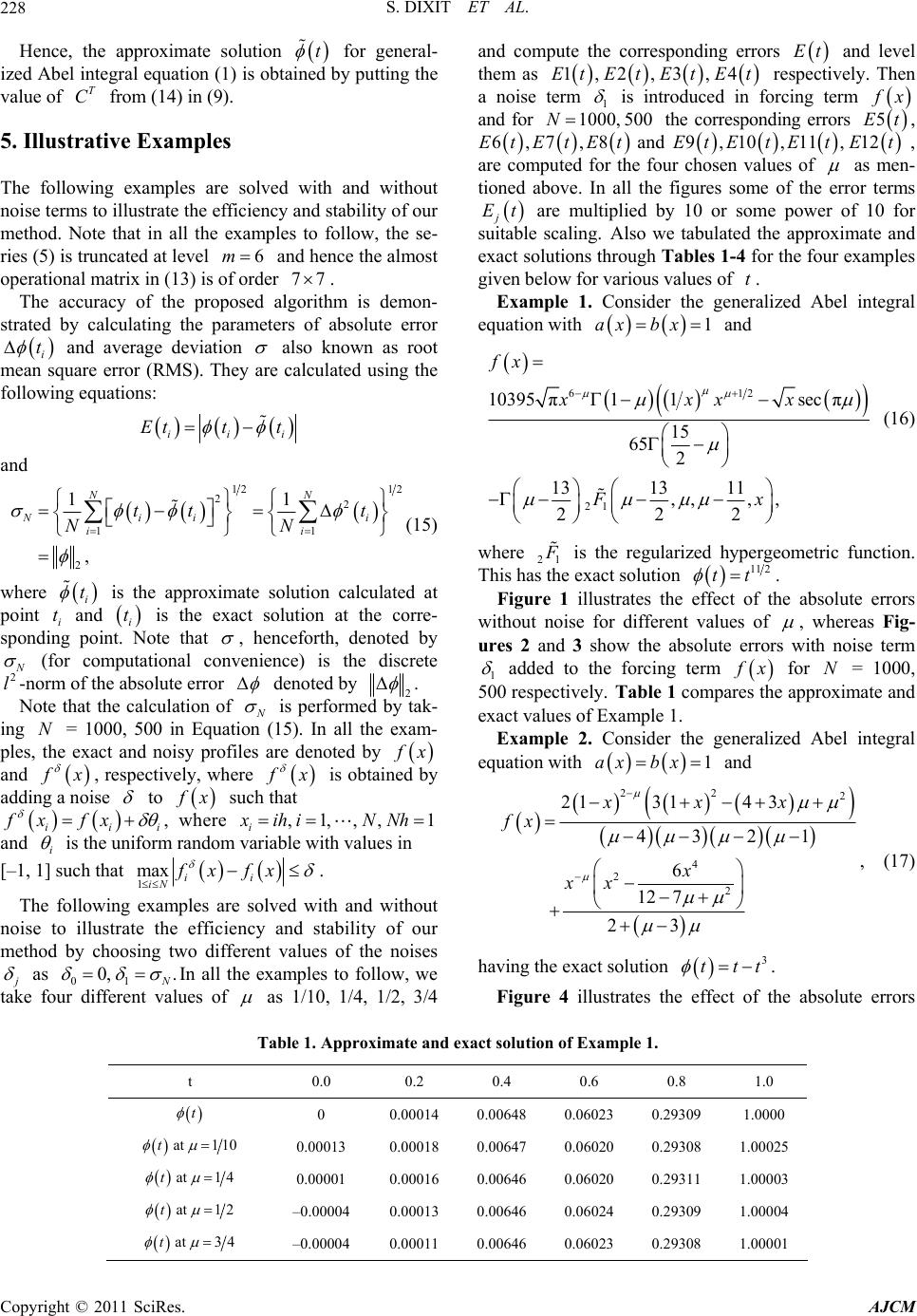 S. DIXIT ET AL. Copyright © 2011 SciRes. AJCM 228 Hence, the approximate solution for general- ized Abel integral equation (1) is obtained by putting the value of from (14) in (9). t T C and compute the corresponding errors and level them as Et 1,2,3,4EtEtEtEt 1 respectively. Then a noise term is introduced in forcing term x and for 1000, 500N the corresponding errors 5Et, 7,8EtEt 6,Et and 12E t9,10EtE,11E t,t, are computed for the four chosen values of as men- tioned above. In all the figures some of the error terms j Et are multiplied by 10 or some power of 10 for suitable scaling. Also we tabulated the approximate and exact solutions through Tables 1-4 for the four examples given below for various values of . t 5. Illustrative Examples The following examples are solved with and without noise terms to illustrate the efficiency and stability of our method. Note that in all the examples to follow, the se- ries (5) is truncated at level 6m and hence the almost operational matrix in (13) is of order . 77Example 1. Consider the generalized Abel integral equation with 1ax bx and The accuracy of the proposed algorithm is demon- strated by calculating the parameters of absolute error and average deviation i t also known as root mean square error (RMS). They are calculated using the following equations: ii Ettt i and 12 12 22 11 2 11 , NN Nii ii tt t NN i (15) 612 21 10395 π11 secπ 15 65 2 1313 11 ,,, , 222 fx xxxx Fx (16) where 21 is the regularized hypergeometric function. This has the exact solution 11 2 tt . where is the approximate solution calculated at point i and is the exact solution at the corre- sponding point. Note that i t t i t , henceforth, denoted by (for computational convenience) is the discrete -norm of the absolute error 2 l denoted by Figure 1 illustrates the effect of the absolute errors without noise for different values of , whereas Fig- ures 2 and 3 show the absolute errors with noise term 1 added to the forcing term x for = 1000, 500 respectively. Table 1 compares the approximate and exact values of Example 1. N . 2 Note that the calculation of is performed by tak- ing = 1000, 500 in Equation (15). In all the exam- ples, the exact and noisy profiles are denoted by N x and x , respectively, where x is obtained by adding a noise to x such that fx x Example 2. Consider the generalized Abel integral equation with 1ax bx and 22 2 4 2 2 21314 3 4321 6 12 7 23 xxx fx x xx , (17) ii i f , where ,1,,,1 i ih i NNh is the uniform random variable with values in and i [–1, 1] such that 1 max ii iN fxfx . The following examples are solved with and without noise to illustrate the efficiency and stability of our method by choosing two different values of the noises as 01 0, . In all the examples to follow, we take four different values of as 1/10, 1/4, 1/2, 3/4 having the exact solution . 3 ttt Figure 4 illustrates the effect of the absolute errors Table 1. Approximate and exact solution of Example 1. t 0.0 0.2 0.4 0.6 0.8 1.0 t 0 0.00014 0.00648 0.06023 0.29309 1.0000 t at 110 0.00013 0.00018 0.00647 0.06020 0.29308 1.00025 t at 14 0.00001 0.00016 0.00646 0.06020 0.29311 1.00003 t at 12 –0.00004 0.00013 0.00646 0.06024 0.29309 1.00004 t at 34 –0.00004 0.00011 0.00646 0.06023 0.29308 1.00001 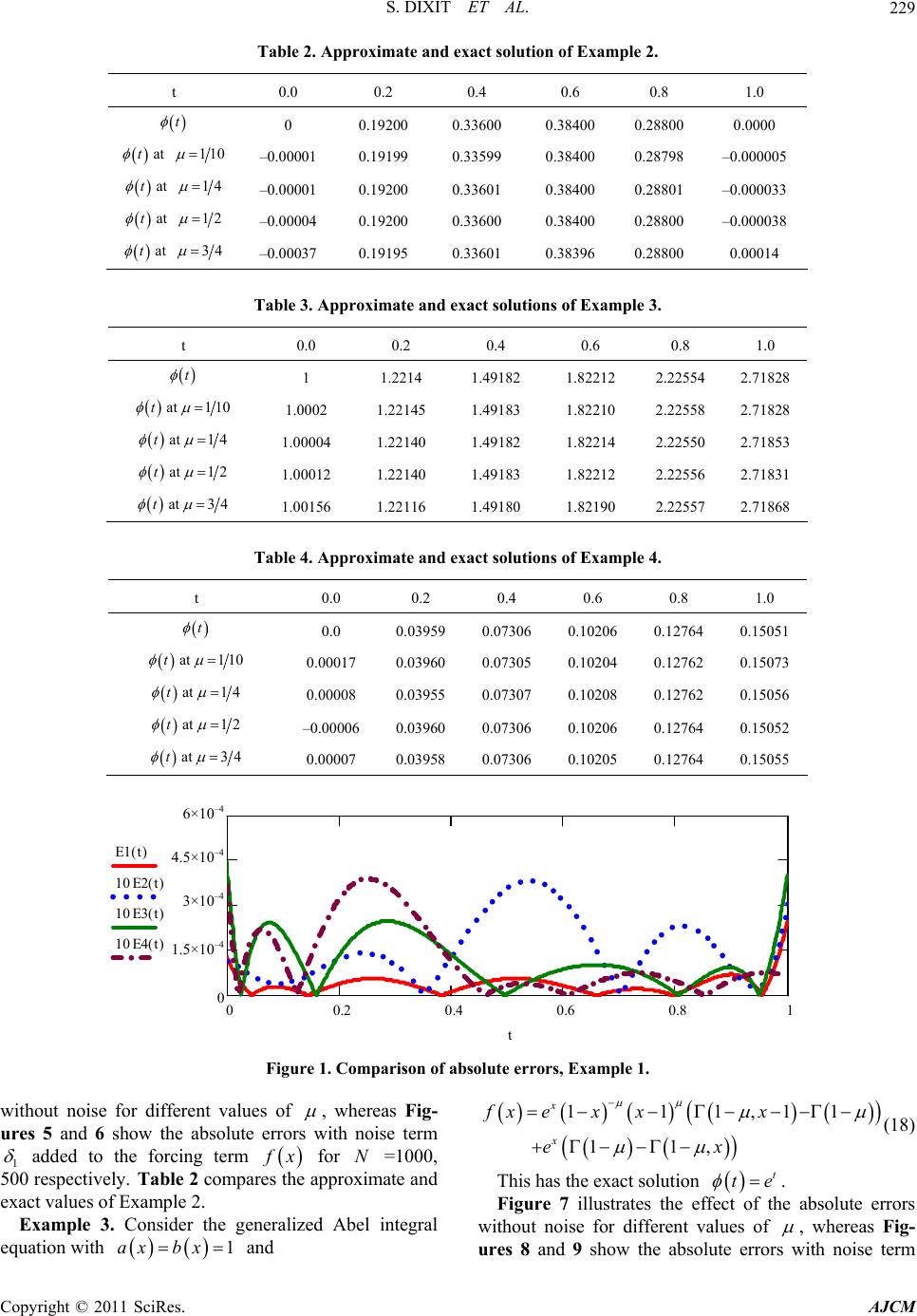 S. DIXIT ET AL.229 Table 2. Approximate and exact solution of Example 2. t 0.0 0.2 0.4 0.6 0.8 1.0 t 0 0.19200 0.33600 0.38400 0.28800 0.0000 t at 110 –0.00001 0.19199 0.33599 0.38400 0.28798 –0.000005 t at 14 –0.00001 0.19200 0.33601 0.38400 0.28801 –0.000033 t at 12 –0.00004 0.19200 0.33600 0.38400 0.28800 –0.000038 t at 34 –0.00037 0.19195 0.33601 0.38396 0.28800 0.00014 Table 3. Approximate and exact solutions of Example 3. t 0.0 0.2 0.4 0.6 0.8 1.0 t 1 1.2214 1.49182 1.82212 2.22554 2.71828 t at 110 1.0002 1.22145 1.49183 1.82210 2.22558 2.71828 t at 14 1.00004 1.22140 1.49182 1.82214 2.22550 2.71853 t at 12 1.00012 1.22140 1.49183 1.82212 2.22556 2.71831 t at 34 1.00156 1.22116 1.49180 1.82190 2.22557 2.71868 Table 4. Approximate and exact solutions of Example 4. t 0.0 0.2 0.4 0.6 0.8 1.0 t 0.0 0.03959 0.07306 0.10206 0.12764 0.15051 t at 110 0.00017 0.03960 0.07305 0.10204 0.12762 0.15073 t at 14 0.00008 0.03955 0.07307 0.10208 0.12762 0.15056 t at 12 –0.00006 0.03960 0.07306 0.10206 0.12764 0.15052 t at 34 0.00007 0.03958 0.07306 0.10205 0.12764 0.15055 00.20.40.60.81 0 1.5 10 4 310 4 4.5 10 4 610 4 E1 t() 10 E2t() 10 E3t() 10 E4t() t 6×10 –4 4.5×10 –4 3×10 –4 1.5×10 –4 Figure 1. Comparison of absolute errors, Example 1. without noise for different values of , whereas Fig- ures 5 and 6 show the absolute errors with noise term 1 added to the forcing term x for =1000, 500 respectively. Table 2 compares the approximate and exact values of Example 2. N Example 3. Consider the generalized Abel integral equation with and 1axbx 111,11 11, x x fx exxx ex (18) This has the exact solution . t te Figure 7 illustrates the effect of the absolute errors without noise for different values of , whereas Fig- res 8 and 9 show the absolute errors with noise term u Copyright © 2011 SciRes. AJCM 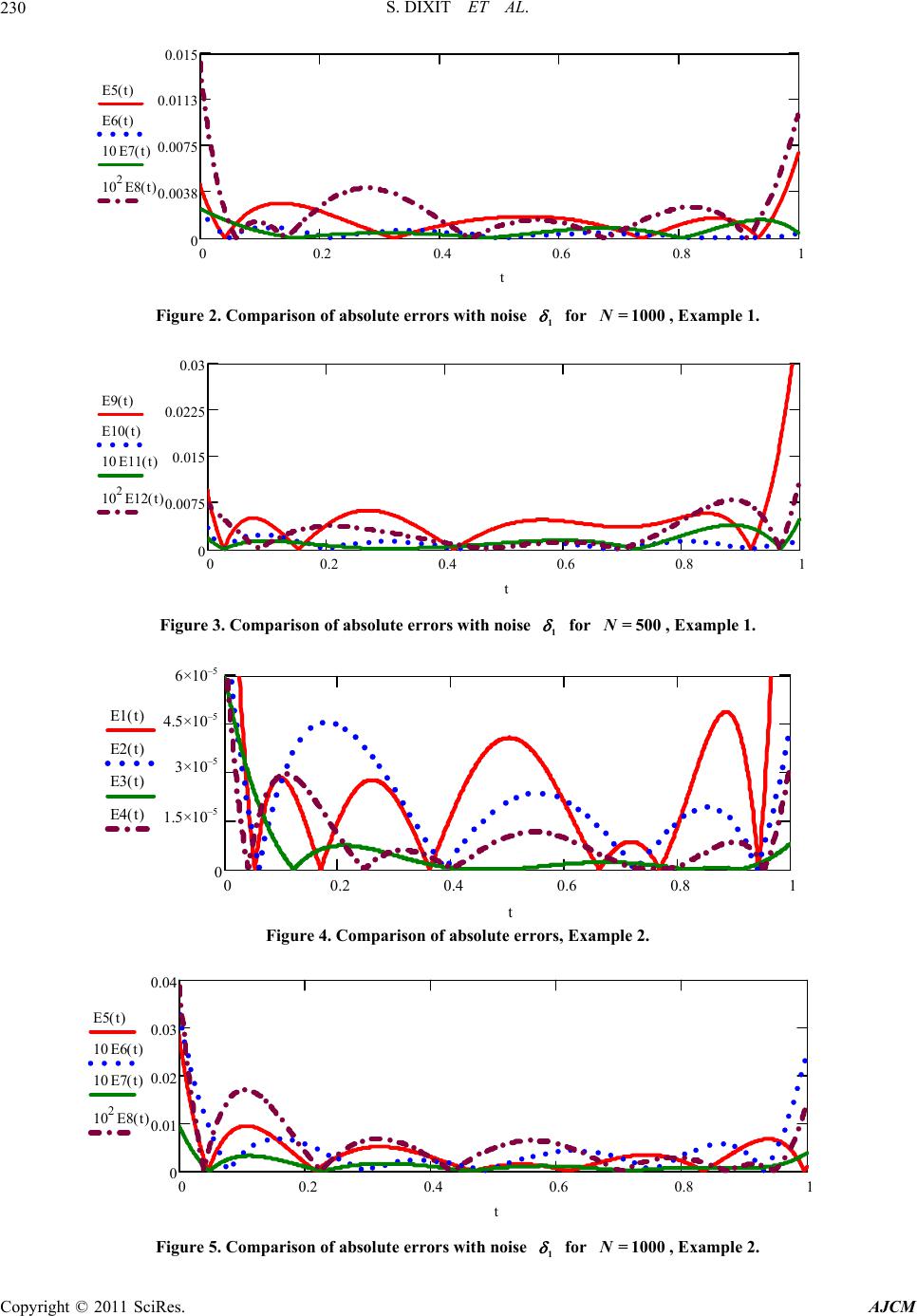 S. DIXIT ET AL. Copyright © 2011 SciRes. AJCM 230 00.2 0.40.60.81 0 0.0038 0.0075 0.0113 0.015 E5 t() E6 t() 10 E7t() 102E8 t() t Figure 2. Comparison of absolute errors with noise 1 for , Example 1. = 1000N 00.20.4 0.6 0.81 0 0.0075 0.015 0.0225 0.03 E9 t() E10 t() 10 E11t() 102E12 t() t Figure 3. Comparison of absolute errors with noise 1 for , Example 1. = 500N 00.2 0.4 0.6 0.81 0 1.5 10 5 310 5 4.5 10 5 610 5 E1 t() E2 t() E3 t() E4 t() t 6×10 –5 4.5×10 –5 3×10 –5 1.5×10 –5 Figure 4. Comparison of absolute errors, Example 2. 00.20.40.6 0.81 0 0.01 0.02 0.03 0.04 E5 t() 10 E6t() 10 E7t() 102E8 t() t Figure 5. Comparison of absolute errors with noise 1 for , Example 2. = 1000N 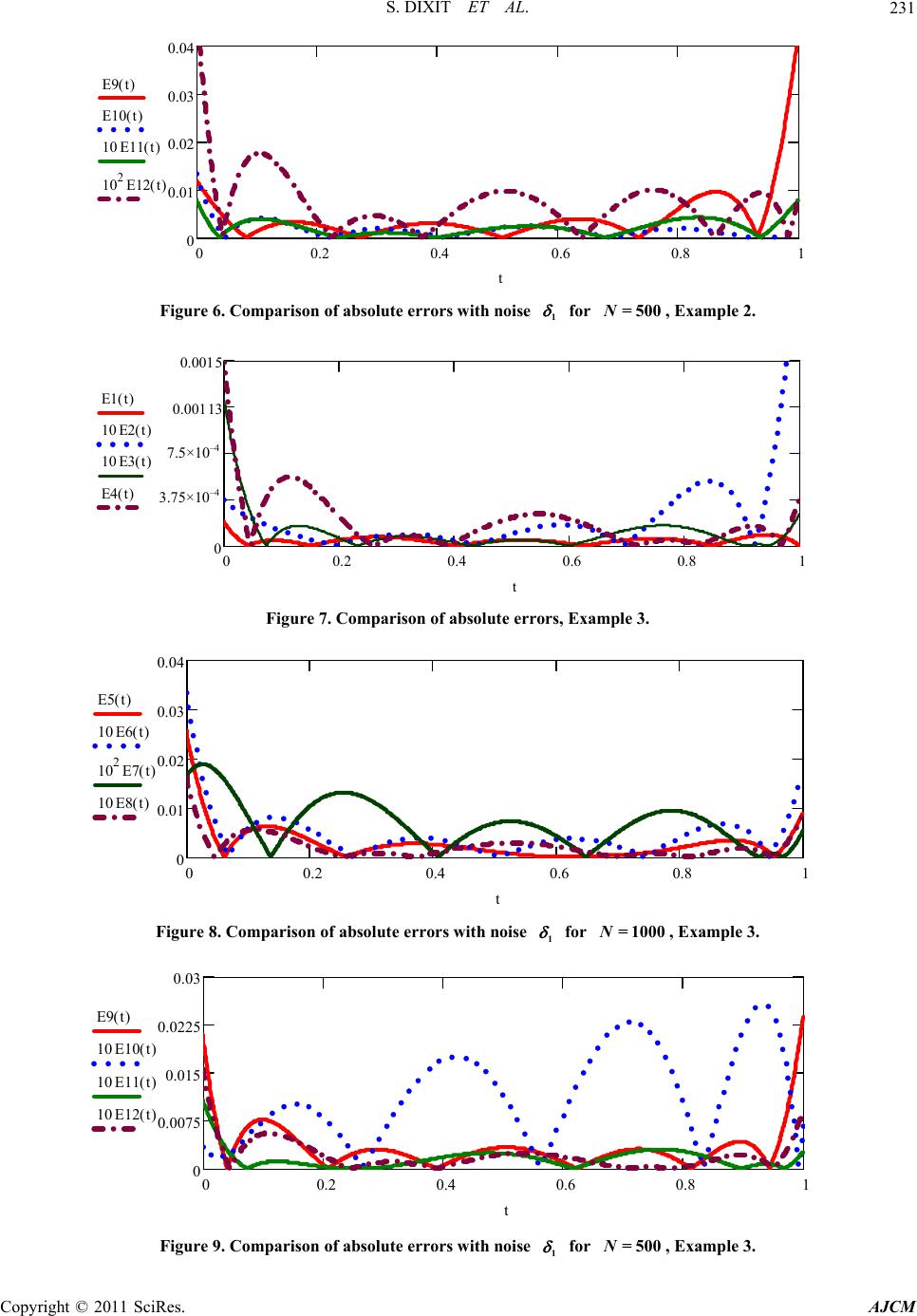 S. DIXIT ET AL.231 00.2 0.40.6 0.81 0 0.01 0.02 0.03 0.04 E9 t() E10 t() 10 E11t() 102E12 t() t Figure 6. Comparison of absolute errors with noise 1 for , Example 2. = 500N 00.20.40.60.8 0 3.75 10 1 4 7.5 104 0.00113 0.0015 E1 t() 10 E2t() 10 E3t() E4 t() t 7.5×10 –4 3.75×10 –4 Figure 7. Comparison of absolute errors, Example 3. 00.2 0.40.6 0.81 0 0.01 0.02 0.03 0.04 E5 t() 10 E6t() 102E7 t() 10 E8t() t Figure 8. Comparison of absolute errors with noise 1 for , Example 3. = 1000N 00.2 0.4 0.6 0.81 0 0.0075 0.015 0.0225 0.03 E9 t() 10 E10t() 10 E11t() 10 E12t() t Figure 9. Comparison of absolute errors with noise 1 for , Example 3. = 500N Copyright © 2011 SciRes. AJCM 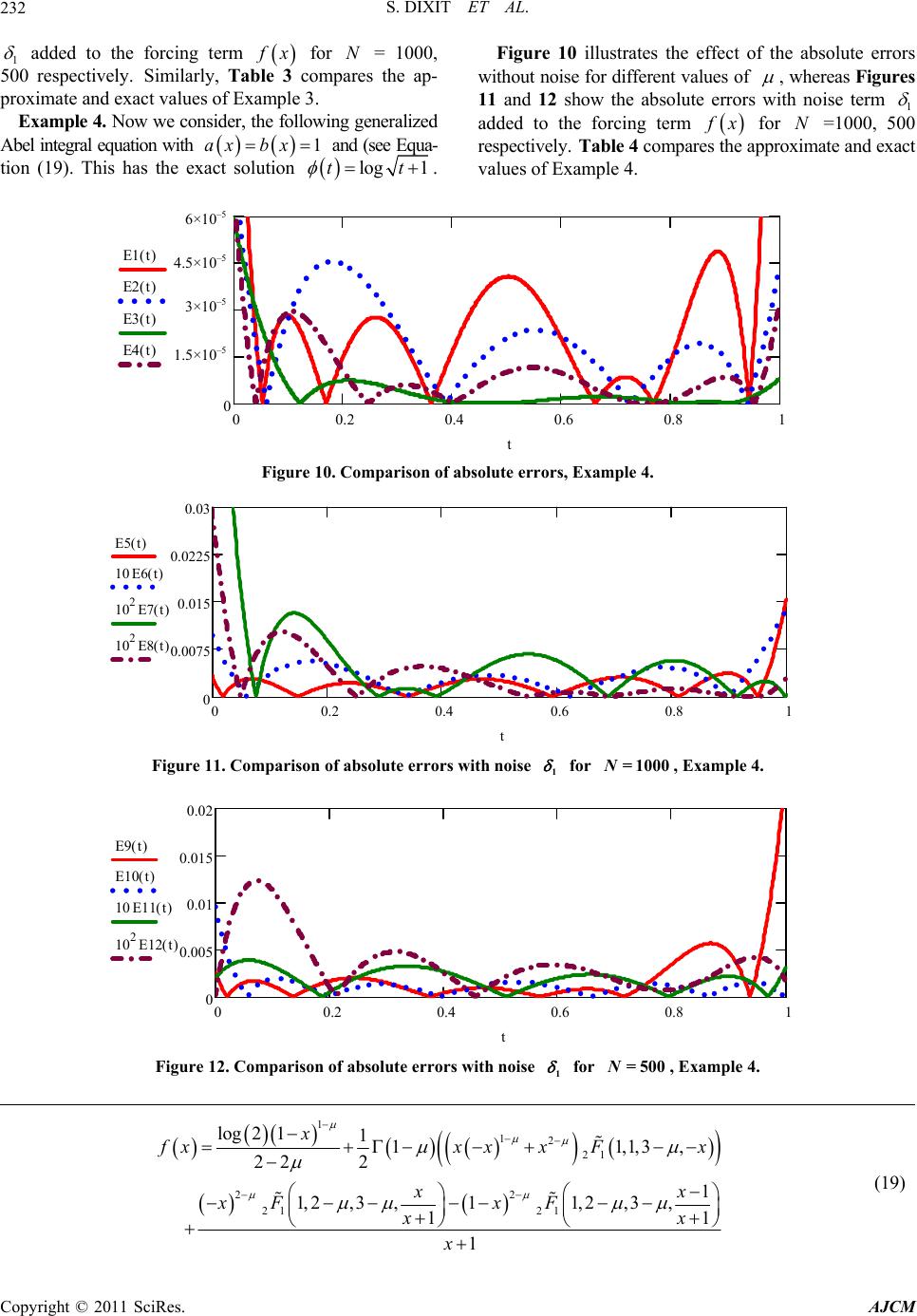 S. DIXIT ET AL. Copyright © 2011 SciRes. AJCM 232 1 added to the forcing term x for = 1000, 500 respectively. Similarly, Table 3 compares the ap- proximate and exact values of Example 3. NFigure 10 illustrates the effect of the absolute errors without noise for different values of , whereas Figures 11 and 12 show the absolute errors with noise term 1 added to the forcing term x for =1000, 500 respectively. Table 4 compares the approximate and exact values of Example 4. N Example 4. Now we consider, the following generalized Abel integral equation with and (see Equa- tion (19). This has the exact solution 1axbx log 1tt . 00.2 0.4 0.6 0.81 0 1.5 10 5 310 5 4.5 10 5 610 5 E1 t() E2 t() E3 t() E4 t() 6×10 –5 4.5×10 –5 3×10 –5 1.5×10 –5 Figure 10. Comparison of absolute errors, Example 4. 00.2 0.40.6 0.81 0 0.0075 0.015 0.0225 0.03 E5 t() 10 E6t() 102E7t() 102E8t() t Figure 11. Comparison of absolute errors with noise 1 for , Example 4. = 1000N 00.2 0.4 0.6 0.81 0 0.005 0.01 0.015 0.02 E9 t() E10 t() 10 E11t() 102E12 t() Figure 12. Comparison of absolute errors with noise 1 for , Example 4. = 500N 1 12 21 22 21 21 log 21111, 22 2 1 1, 2, 3,11,2, 3, 11 1 x1,3, xxxxF xx xF xF xx x x (19) 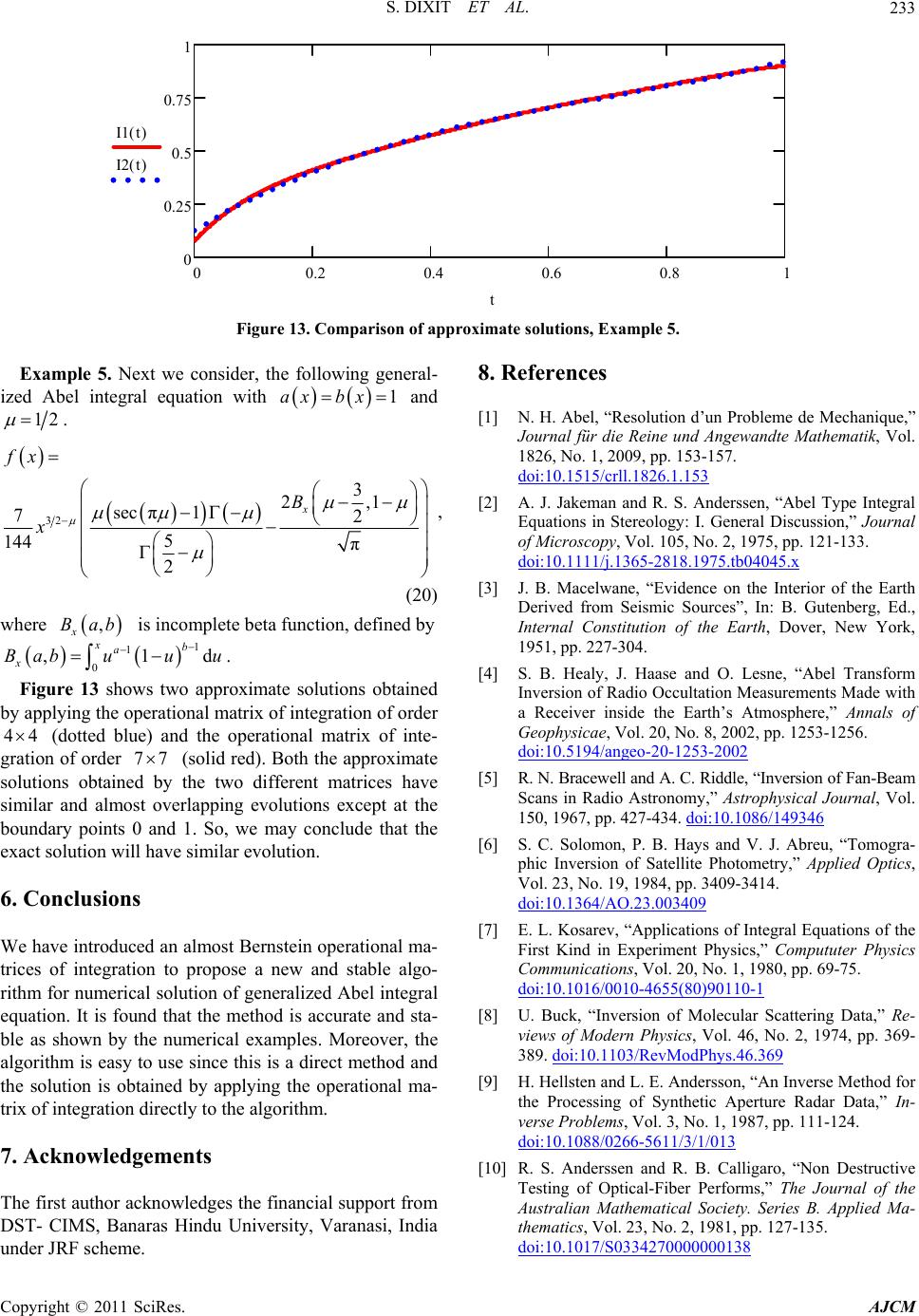 S. DIXIT ET AL.233 00.2 0.4 0.6 0.81 0 0.25 0.5 0.75 1 I1 t() I2 t() Figure 13. Comparison of approximate solutions, Example 5. Example 5. Next we consider, the following general- ized Abel integral equation with and 1axbx 12 . 32 3 2,1 sec π1 72 5 144 π 2 x fx B x d , (20) where is incomplete beta function, defined by , x Bab 1 xa 1 0 ,1 b x Babuu u . Figure 13 shows two approximate solutions obtained by applying the operational matrix of integration of order (dotted blue) and the operational matrix of inte- gration of order (solid red). Both the approximate solutions obtained by the two different matrices have similar and almost overlapping evolutions except at the boundary points 0 and 1. So, we may conclude that the exact solution will have similar evolution. 44 77 6. Conclusions We have introduced an almost Bernstein operational ma- trices of integration to propose a new and stable algo- rithm for numerical solution of generalized Abel integral equation. It is found that the method is accurate and sta- ble as shown by the numerical examples. Moreover, the algorithm is easy to use since this is a direct method and the solution is obtained by applying the operational ma- trix of integration directly to the algorithm. 7. Acknowledgements The first author acknowledges the financial support from DST- CIMS, Banaras Hindu University, Varanasi, India under JRF scheme. 8. References [1] N. H. Abel, “Resolution d’un Probleme de Mechanique,” Journal für die Reine und Angewandte Mathematik, Vol. 1826, No. 1, 2009, pp. 153-157. doi:10.1515/crll.1826.1.153 [2] A. J. Jakeman and R. S. Anderssen, “Abel Type Integral Equations in Stereology: I. General Discussion,” Journal of Microscopy, Vol. 105, No. 2, 1975, pp. 121-133. doi:10.1111/j.1365-2818.1975.tb04045.x [3] J. B. Macelwane, “Evidence on the Interior of the Earth Derived from Seismic Sources”, In: B. Gutenberg, Ed., Internal Constitution of the Earth, Dover, New York, 1951, pp. 227-304. [4] S. B. Healy, J. Haase and O. Lesne, “Abel Transform Inversion of Radio Occultation Measurements Made with a Receiver inside the Earth’s Atmosphere,” Annals of Geophysicae, Vol. 20, No. 8, 2002, pp. 1253-1256. doi:10.5194/angeo-20-1253-2002 [5] R. N. Bracewell and A. C. Riddle, “Inversion of Fan-Beam Scans in Radio Astronomy,” Astrophysical Journal, Vol. 150, 1967, pp. 427-434. doi:10.1086/149346 [6] S. C. Solomon, P. B. Hays and V. J. Abreu, “Tomogra- phic Inversion of Satellite Photometry,” Applied Optics, Vol. 23, No. 19, 1984, pp. 3409-3414. doi:10.1364/AO.23.003409 [7] E. L. Kosarev, “Applications of Integral Equations of the First Kind in Experiment Physics,” Compututer Physics Communications, Vol. 20, No. 1, 1980, pp. 69-75. doi:10.1016/0010-4655(80)90110-1 [8] U. Buck, “Inversion of Molecular Scattering Data,” Re- views of Modern Physics, Vol. 46, No. 2, 1974, pp. 369- 389. doi:10.1103/RevModPhys.46.369 [9] H. Hellsten and L. E. Andersson, “An Inverse Method for the Processing of Synthetic Aperture Radar Data,” In- verse Problems, Vol. 3, No. 1, 1987, pp. 111-124. doi:10.1088/0266-5611/3/1/013 [10] R. S. Anderssen and R. B. Calligaro, “Non Destructive Testing of Optical-Fiber Performs,” The Journal of the Australian Mathematical Society. Series B. Applied Ma- thematics, Vol. 23, No. 2, 1981, pp. 127-135. doi:10.1017/S0334270000000138 Copyright © 2011 SciRes. AJCM  S. DIXIT ET AL. 234 [11] K. Taketura, “Index Profile Determination of Single-Mode Fiber by the Phase Contrast Method: A Proposed Tech- nique,” Applied Optics, Vol. 21, No. 23, 1982, pp. 4260- 4263. doi:10.1364/AO.21.004260 [12] W. J. Glantschnig, “How Accurately Can One Reconstruct an Index Profile from Transverse Measurement Data,” Journal of Lightwave Technology, Vol. 3, No. 3, 1985, pp. 678-683. doi:10.1109/JLT.1985.1074221 [13] E. Keren, E. Bar-Ziv, I. Glatt and O. Kafri, “Measurements of Temperature Distribution of Flames by Moiré Deflec- tometry,” Applied Optics, Vol. 20, No. 24, 1981, pp. 4263- 4266. doi:10.1364/AO.20.004263 [14] C. J. Tallents, M. D. J. Burgess and B. Luther-Davies, “The Determination of Electron Density Profiles from Re- fraction Measurements Obtained Using Holographic In- terferometry,” Optics Communications, Vol. 44, No. 6, 1983, pp. 384-387. doi:10.1016/0030-4018(83)90222-5 [15] C. Fleurier and J. Chapelle, “Inversion of Abel’s Integral Equation Application to Plasma Spectroscopy,” Compu- tuter Physics Communications, Vol. 7, No. 4, 1974, pp. 200-206. doi:10.1016/0010-4655(74)90089-7 [16] K. M. Hanson, “Tomographic Reconstruction of Axially Symmetric Objects from a Single Radiograph,” Proceed- ings of SPIE 16th International Conference on High Speed Photography and Photonics, Vol. 491, 1984, pp. 180-187. [17] W. J. Glantschnig and A. Holliday, “Mass Fraction Pro- filing Based on X-Ray Tomography and Its Application to Characterising Porous Silica Boules,” Applied Optics, Vol. 26, No. 6, 1987, pp. 983-989. doi:10.1364/AO.26.000983 [18] A. M. Cormack, “Representation of a Function by Its Line Integrals with Some Radiological Applications,” Journal of Applied Physics, Vol. 34, No. 9, 1963, pp. 2722-2727. doi:10.1063/1.1729798 [19] M. Deutsch, A. Notea and D. Pal, “Inversion of Abel’s Integral Equation and Its Application to NDT by X-Ray Radiography,” NDT International, Vol. 23, No.1, 1990, pp. 32-38. [20] A. Chakrabarti, “Solution of the Generalized Abel Integral Equation,” Journal of Integral Equation s and Appl ication s, Vol. 20, No. 1, 2008, pp. 1-11. doi:10.1216/JIE-2008-20-1-1 [21] F. D. Gakhov, “Boundary Value Problems,” Pergamon Press, Oxford, 1966. Copyright © 2011 SciRes. AJCM
|