
Modern Mechanical Engineering, 2011, 1, 56-68
doi:10.4236/mme.2011.12008 Published Online November 2011 (http://www.SciRP.org/journal/mme)
Copyright © 2011 SciRes. MME
Analysis of Stresses and Deflection of Sun Gear by
Theoretical and ANSYS Method
Yogesh C. Hamand, Vilas Kalamkar
Mechanical Department, Sardar Patel College of Engineering, Mumbai, India
E-mail: yogeshhamand@rediffmail.com, vilaskalamkar@gmail.com
Received September 30, 2011; revised October 25, 2011; accepted November 5, 2011
Abstract
Gearing is one of the most critical components in mechanical power transmission systems. This article ex-
amines the various stresses and deflection developed in sun gear tooth of planetary gearbox which is used in
Grabbing Crane. Article includes checking sun gear wear stresses and bending stresses using IS 4460 equa-
tions. Also calculate various forces acting on gear tooth. In this study, perform the calculation for sun gear
tooth to calculate bending, shear, wear & deflection using theoretical method. 3D model is created of circular
root fillet & trochoidal root fillet of gear tooth for simulation using ProE Wildfire 3. In Pro-E, the geometry
is saved as a file and then it is transferred from Pro-E to ANSYS 10 in IGES format. The results of the 3 D
analyses from ANSYS are compared with the theoretical values. Comparison of ANSYS results in circular
root fillet & trochoidal root fillet also carry out.
Keywords: Bending Stress, Circular Root Fillet, Deflection, Grabbing Crane, Planetary Gearbox, Shear
Stress, Sun Gear, Trochoidal Root Fillet, Wear
1. Introduction
In spite of the number of investigations devoted to gear
research and analysis there still remains to be developed, a
general numerical approach capable of predicting the effects
of variations in gear geometry, shear, wear and bending
stresses. The objective of this work is to use ANSYS to de-
velop theoretical models of the behavior of planetary gears
in mesh, to help to predict the effect of gear tooth stresses
and deflection. The main focus of the current research as
developed here is to develop and to determine appropriate
models of contact elements, to calculate various stresses and
using ANSYS and compare the results with theoretical.
The project work mainly deals with
1) Checking of wear stresses & bending stresses using
IS 4460 equations for sun gear.
2) Force calculations for planetary gear
3) Calculate the values for sun gear tooth for bending,
shear, wear & deflection using theoretical method.
4) Generation of gear tooth profile in Pro-E3.
5) Create 3D model of circular root fillet & trochoidal
root fillet of gear tooth for simulation using Pro-E3.
6) Importing Pro-E model in ANSYS in IGES format.
7) Comparison of the results of the 3D analyses from
ANSYS with the theoretical values.
8) Comparison of ANSYS results in circular root fillet
& trochoidal root fillet.
Shanmugasundaram Sankar, Maasanamuthu Sundar
Raj & Muthusamy Nataraj [1] have introduced Correc-
tive measures are taken to avoid tooth damage by intro-
ducing profile modification in root fillet. Tesfahunegn and
Rosa [2] investigated the influence of the shape of profile
modifications on transmission error, root stress and con-
tact pressure through non linear finite element approach.
Chun-Fang Tsai ,Tsang-Lang Liang & Shyue-Cheng Yang
[3] prepared a complete mathematical model of the pla-
netary gear mechanism with double circular-arc teeth is
developed. Ravichandra Patchigolla and Yesh P. Singh [4]
developed a program using ANSYS Parametric De- sign
Language (APDL) to generate 1, 3 or 5 tooth segment
finite element models of a large spur gear. Faydor L. Lit-
vin, Alfonso Fuentes, Daniele Vecchiato, and Ignacio
Gonzalez-Perez [5] proposed a new types of planetary
and planetary face-gear drives & the new designs are
based on regulating backlash between the gears and mo-
difying the tooth surfaces to improve the design.
2. Terminology
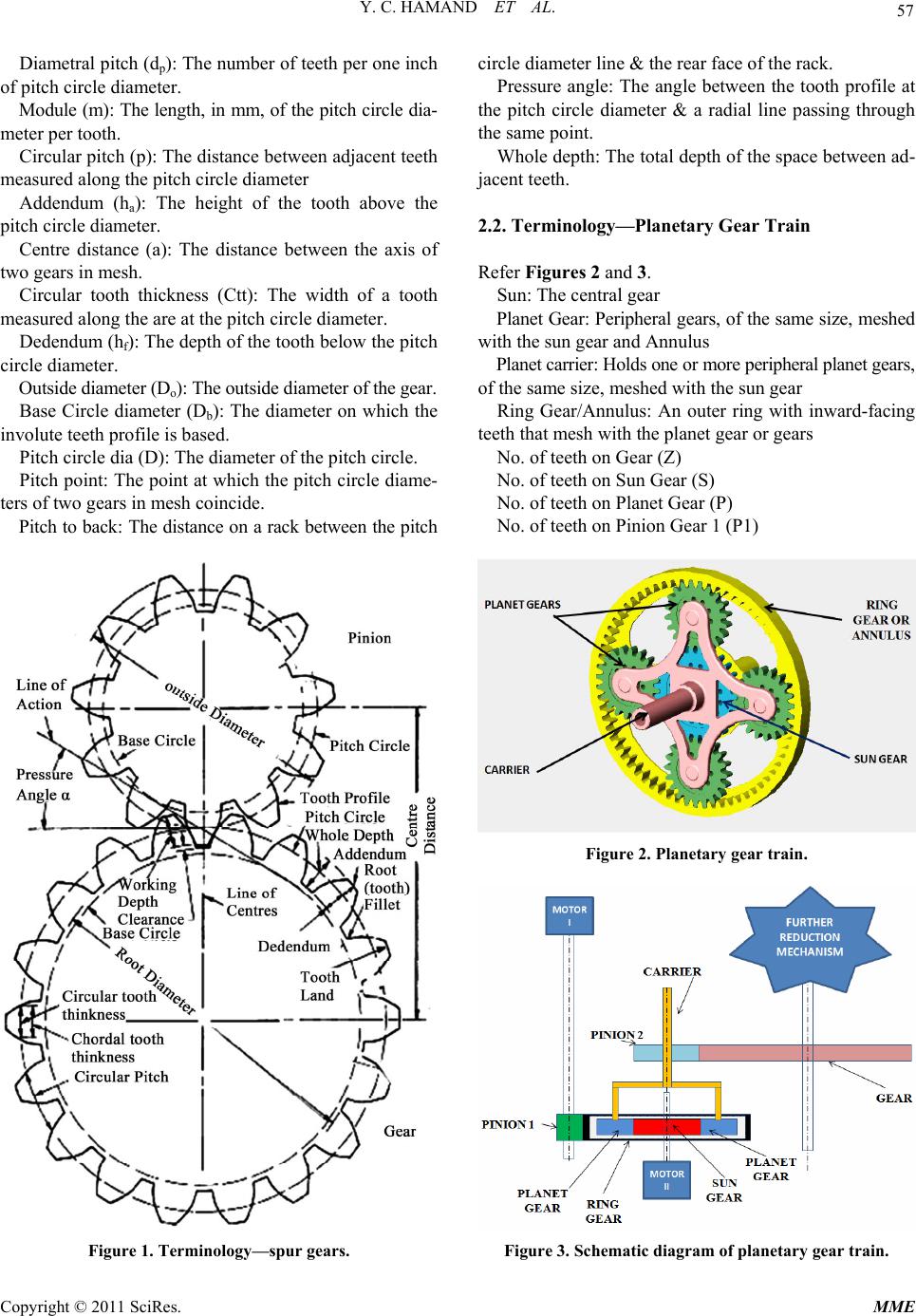
2.1. Terminology—Spur Gears
Refer: Figure 1.

{kind=link}