B. DEHGHAN ET AL.
Copyright © 2011 SciRes. ICA
395
itself as the operating condition changes. Finally, al-
though accuracy is on the order of ±6 mm which seems
poor, as a percentage of stroke this equates to ±0.6%,
which is comparable to the percent accuracy reported by
[1] and [3].
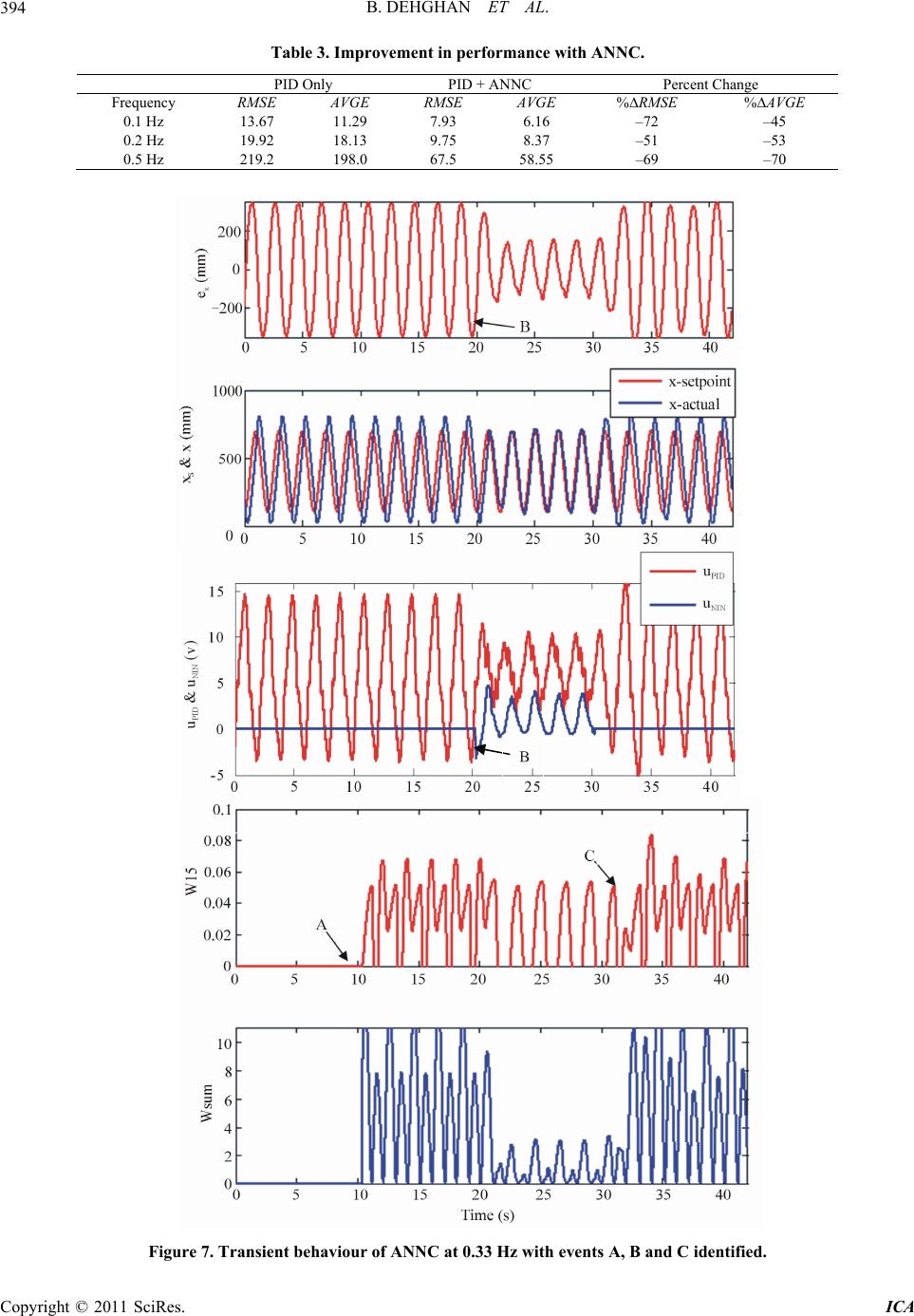
4.2. Transient Behaviour of ANNC
A series of additional tests were conducted at 0.33 Hz to
study the transient behaviour of ANNC and to confirm
that it was indeed “adapting”. Figure 7 illustrates system
response when the ANNC is turned on and off. There are
three events to highlight:
Event A (10 s)—ANNC learning starts (u = uPID)
Event B (20 s)—ANNC connected (u = uPID – uNN)
Event C (30 s)—ANNC disconnected (u = uPID)
The active adaptive nature of ANNC is clearly visible
and the result for this particular case is a 71% reduction
in AVGE. The weights reach their new values in just one
cycle. Note that Wsum is the sum of the elements of W and
thus exceeds the individual limit of 10 that seen in Table
1.
5. Conclusions
The potential of a novel adaptive on-line neural network
compensator (ANNC) for the position control of a
pneumatic gantry robot has been demonstrated. It was
found that by combining ANNC with a traditional PID
controller, tracking performance could be improved on
the order of 45% to 70%. This level of performance was
achieved after careful tuning of both the ANNC and PID
components. This paper documented the ANNC algo-
rithm and its tuning procedure, and presented experi-
mental results that illustrated the adaptive nature of NN
and confirmed the performance achievable with ANNC.
A major contribution is demonstration that tuning of
ANNC requires no more effort than the tuning of PID, in
that they both require the user to find values for only 3
parameters.
6. References
[1] G. M. Bone and S. Ning, “Experimental Comparison of
Position Tracking Control Algorithms for Pneumatic
Cylinder Actuators,” IEEE/ASME Transactions on Mecha-
tronics, Vol. 12, No. 5, 2007, pp. 557-561.
doi:10.1109/TMECH.2007.905718
[2] Y. Wang, H. Su, K. Harrington and G. Fischer, “Sliding
Mode Control of Piezoelectric Valve Regulated Pneu-
matic Actuator for MRI-Compatible Robotic Interven-
tion,” Proceeding of ASME Dynamic Systems and Con-
trol Conference, Cambridge, 12-15 September 2010, pp.
1-6.
[3] S. C. Gi, K. L. Han and H. C. Gi, “A Study on Tracking
Position Control of Pneumatic Actuators using Neural
Network,” Proceeding of 24th Annual Conference on IEEE
Industrial Electronics Society, Aachen, 31 Augudt-4 Sep-
tember 1998, pp. 1749-1753.
[4] D. C. Gross and K.S. Rattan, “Pneumatic Cylinder Tra-
jectory Tracking Control using a Feedforward Multilayer
Neural Network,” Proceedings of the IEEE 1997 Na-
tional Aerospace and Electronics Conference, Dayton,
14-17 July 1997, pp. 777-784.
doi:10.1109/NAECON.1997.622728
[5] Y. Li and T. Asakura, “A Study on Neural Network Con-
trol of Explosion-Proof 2-link Pneumatic Manipulator,”
2003 IEEE/ASME International Conference on Advanced
Intelligent Mechatronics, Kobe, 20-24 July 2003, pp.
1286-1291. doi:10.1109/AIM.2003.1225528
[6] X. Wang and G. Peng, “Modeling and Control for Pneu-
matic Manipulator Based on Dynamic Neural Network,”
Proceeding of IEEE International Conference on Systems,
Man and Cybernetics, Washington, DC, 5-8 October
2003, pp. 2231-2236.
[7] G. Kothapalli and M. Y. Hassan, “Design of a Neural
Network Based Intelligent PI Controller for a Pneumatic
System,” IAENG International Journal of Computer Sci-
ence, Vol. 35, No. 2, 2008, pp. 217-225.
[8] S. Taghizadeh, B. Surgenor and M. Abu Mallouh, “Con-
trol of a Pneumatic Gantry Robot with Adaptive Neural
Network Compensation,” Proceeding of 34th Mecha-
nisms and Robotics Conference, Montreal, 15-18 August
2010.
[9] F. L. Lewis, “Neural Network Control of Robot Manipu-
lators,” IEEE Expert, Vol. 11, No. 3, 1996, pp. 64-75.
doi:10.1109/64.506755
[10] G. Campa, M. Fravolini and M. Napolitano, “A Library
of Adaptive Neural Networks for Control Purposes,”
2002 IEEE International Symposium on Computer Aided
Control System Design, Glasgow, 18-20 September 2002,
pp. 115-120. doi:10.1109/CACSD.2002.1036939
[11] F. W. Lewis, S. Jagannathan and A. Yesildirak, “Neural
Network Control of Robot Manipulators and Non-Linear
Systems,” Taylor & Francis, London, 1999.
[12] R. C. Rice, “PID Tuning Guide,” Rockwell Automation,
Milwaukee, 2010.