Intelligent Control and Automation, 2011, 2, 293-298
doi:10.4236/ica.2011.24034 Published Online November 2011 (http://www.SciRP.org/journal/ica)
Copyright © 2011 SciRes. ICA
Using the Prony Analysis for Assessing Servo Drive Control
Reimund Neugebauer, Ruben Schönherr*, Holger Schlegel
Chemnitz University of Technology, Faculty of Mechanical Engineering, Institute for Machine Tools
and Production Processes, Chemnitz, Germany
E-mail: *wzm@mb.tu-chemnitz.de
Received June 10, 2011; revised July 1, 2011; accepted August 8, 2011
Abstract
The Prony Analysis is already used in different fields of science and industries. The described new approach
intends assessing the performance of Servo Drive Control. The basic approach is, that two important dy-
namic parameters of closed loop behavior, damping and frequency, are estimated by the Prony method.
Hence analyzing a control loop in this way leads to a statement concerning the quality of control and allows
comparing different parameter sets. The paper presents results achieved by using this method on a test rig.
Keywords: Servo Drive, Control, Assessment, Monitoring, Prony Method
1. Introduction
Several mathematical approaches proofed to be practical
for monitoring functions and assessment purposes in
refineries and chemical plants. Therefore, automatic con-
troller assessment is a known feature of state-of-the-art
process controlling systems. The most common term in
literature for these methods is “Control Loop Perform-
ance Monitoring” (CLPM).
Observing the controller behaviour of servo drives in a
similar way ought to be advantageous for machines in
production industries. Due to a raising number of direct
drives and lightweight components, controller settings
have a growing influence on the overall system behav-
iour. Thus, detecting inadequate control characteristics
becomes also more important for process reliability.
Furthermore, monitoring methods could contribute to the
reduction of energy consumption in the drive by auto-
matically recognizing aggressively tuned controllers.
The idea of implementing the known methods in drive
controllers is the most obvious way in order to benefit
from the research in the field of process control moni-
toring. However, several differences between the two
fields of controlling impede this direct approach. The
main drawback results from the different objectives of
controlling:
In process industries, control is focused on keeping the
controlled variable close to a constant setpoint. Thus
disturbance rejection is of major importance. In com-
parison to this, drive systems are supposed to follow a
dynamically changing setpoint. So, emphasis is placed
on tracking capabilities. The following Ta ble 1 points
out to further differences between process and servo
drive control.
Because of these disparate properties, the known
methods of CLPM can not easily be implemented into
drive systems. Especially the traditional attributes for
assessing controller performance like output variance [2]
are not suitable for drive systems. This leads to a need
for new methods of controller assessment in the field of
servo drives.
Servo Drive Control
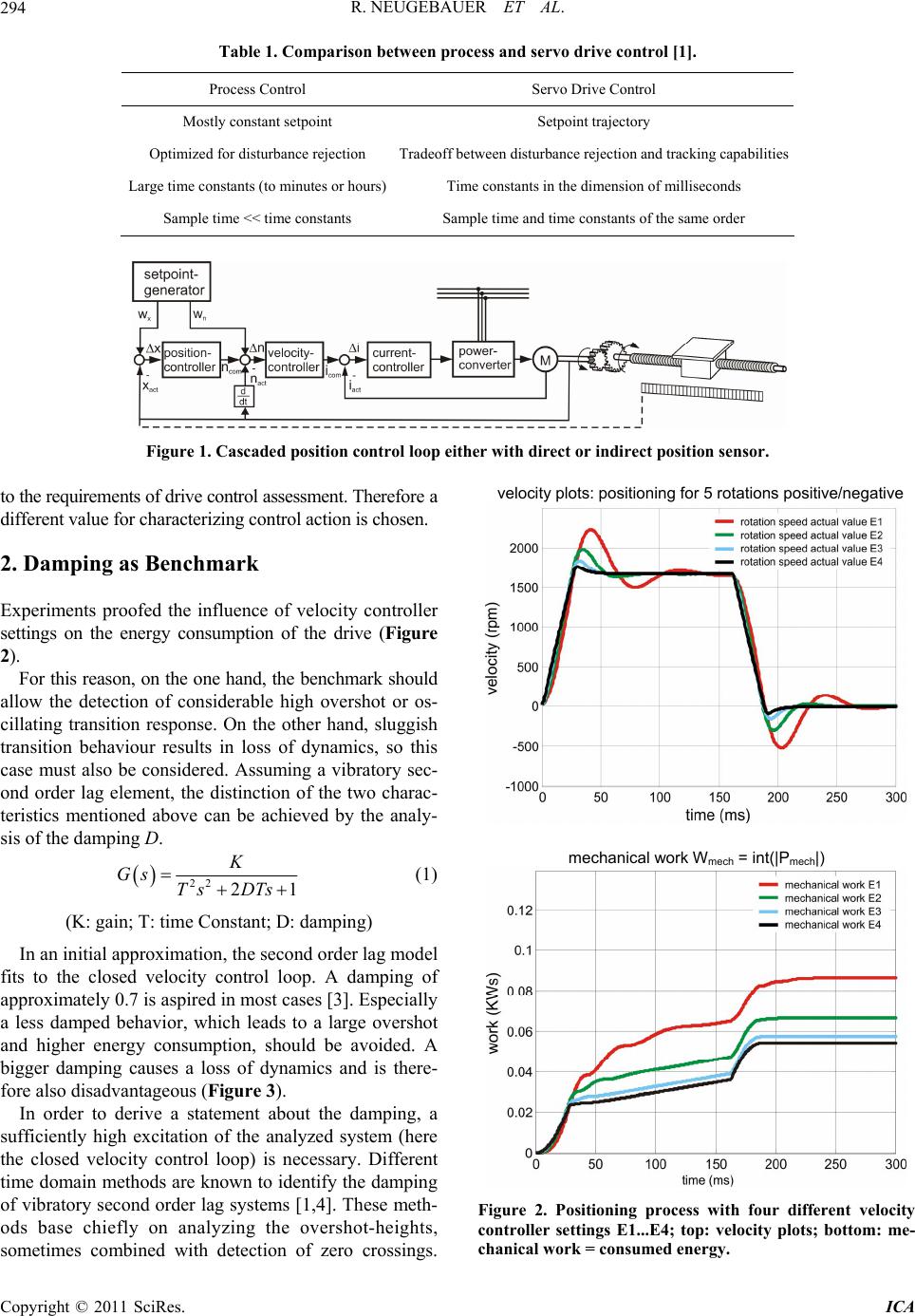
Appart from some special applications, the cascaded
loop structure shown in Figure 1 is the basis of most
controlled (electrical) drive systems [3].
The paper focuses on the velocity feedback control of
electrical servo drives because of different reasons. Two
should be mentioned here:
Firstly, monitoring of the current control loops behav-
iour is not expected to be very useful, because it depends
on the well known or measurable parameters inductance
and resistance. So automatic tuning is state of the art and
leads to feasible results. Furthermore parameters are
nearly constant over time, so deterioration of behavior is
not expected.
Secondly, the velocity controllers’ behavior limits the
achievable dynamics of the position controller. So the
velocity control loop is of major importance regarding
the drive dynamics.
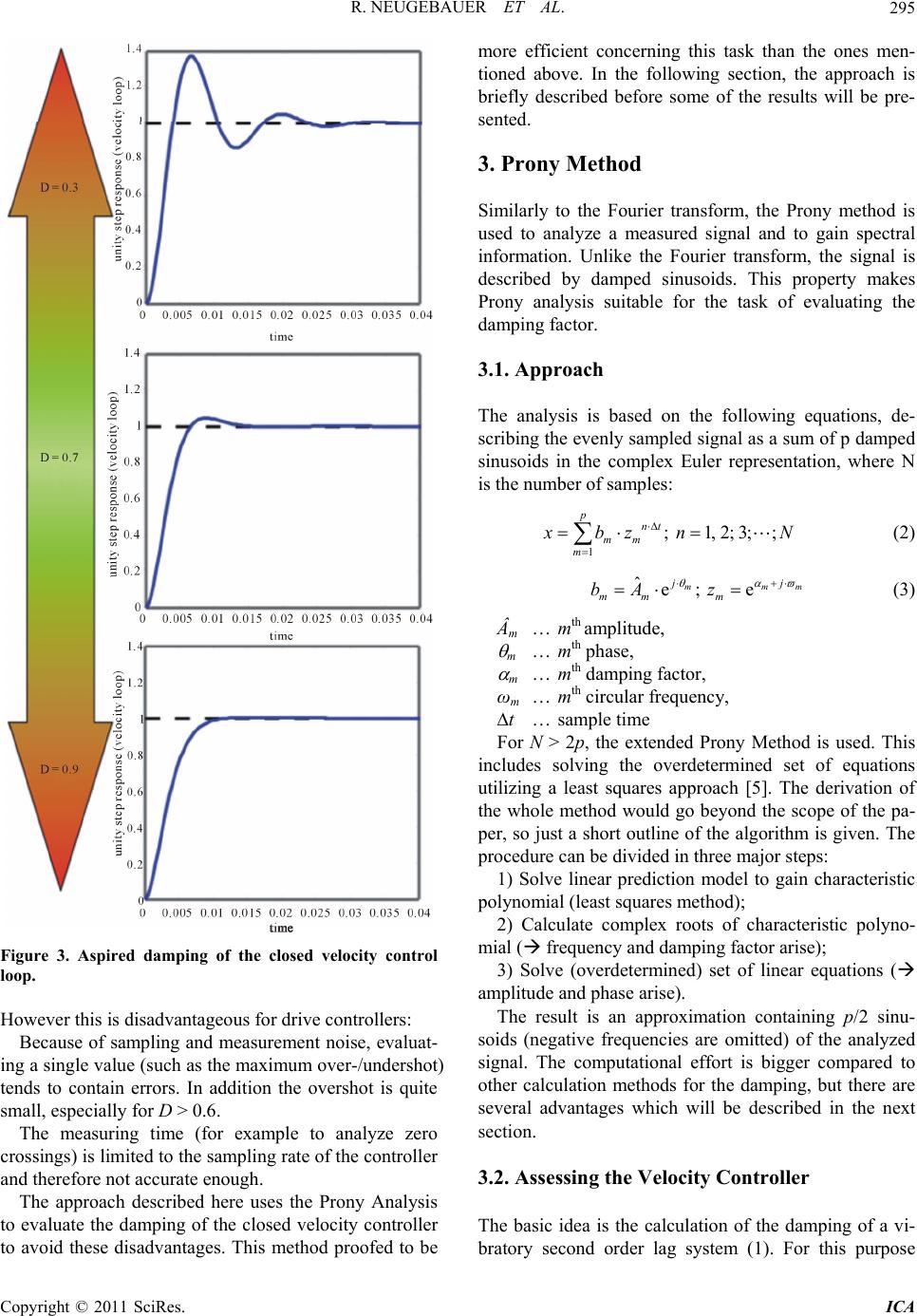
As mentioned above, the quantity “variance of control-
led variable” commonly used as benchmark, does not suit