I. ALI ET AL.
Copyright © 2011 SciRes. AJOR
154
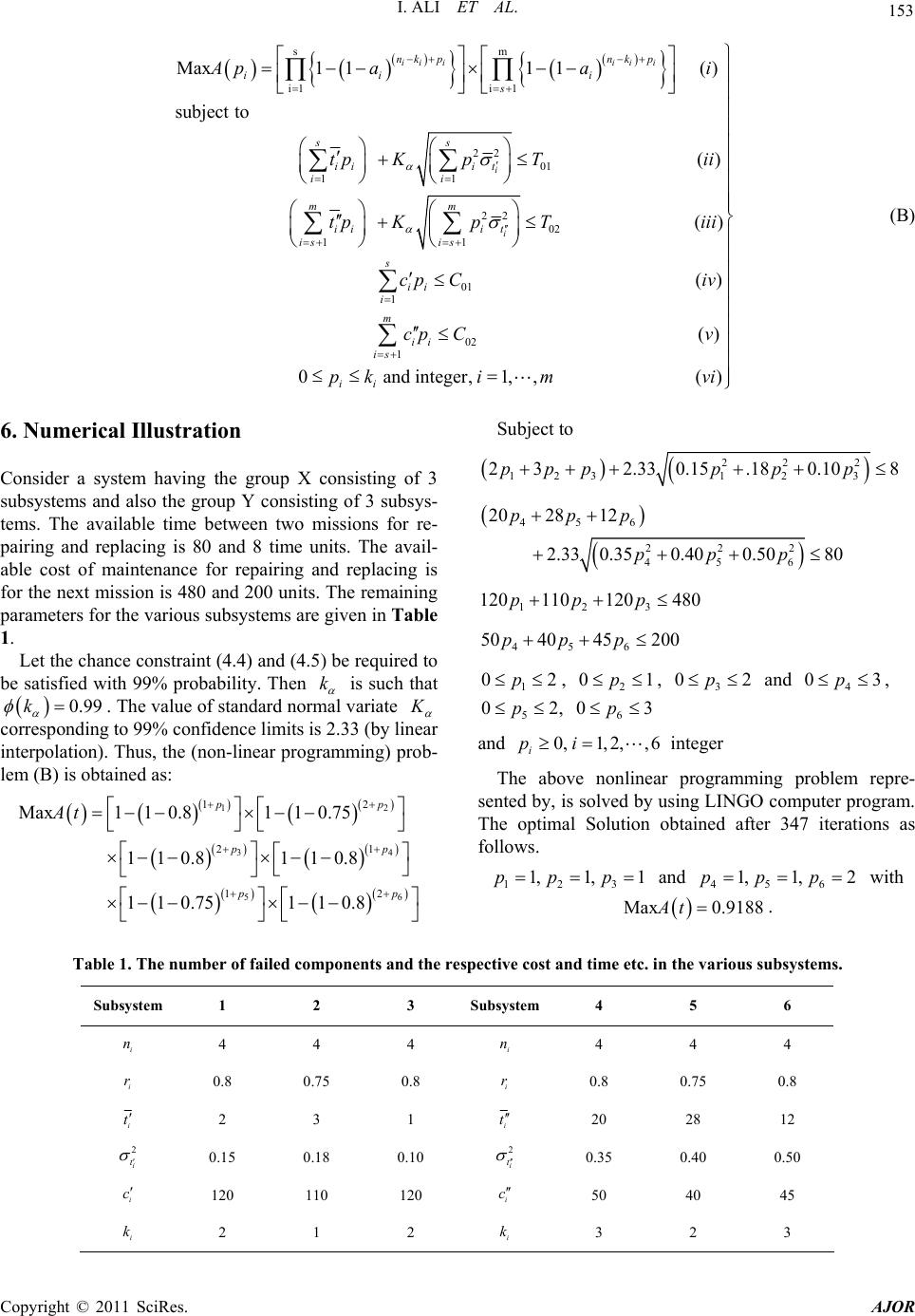
So in subsystem 1, 2 and 3 we replace 1, 1 and 1
components respectively while in the subsystems 4, 5
and 6 we repair and then replace 1, 1 and 2 components
respectively.
7. Conclusions
This paper has provided a profound study of the selective
maintenance problem for an optimum allocation of re-
pairable and replaceable components in system availabil-
ity as a problem of non-linear stochastic programming in
which we maximize the system availability under the
upper bounds on maintenance (i.e., repair and replace)
time and cost. The maintenance time considered as a
random variable and has normal distribution. An equiva-
lent deterministic form of the stochastic non-linear pro-
gramming problem (SNLPP) is established by using the
chance constrained programming problem. Many authors
have solved the allocation of repairable component
problem. But to solve the above problem with probabil-
istic maintenance time will be much more helpful to
demonstrate the practically complicated situations related
to system maintenance problem.
8. References
[1] W. F. Rice, C. R. Cassady and J. A. Nachlas, “Optimal
Maintenance Plans under Limited Maintenance Time,”
Proceedings of the 7th Industrial Engineering Research
Conference, Banff, 9-10 May 1998.
[2] C. R. Cassady, E. A. Pohl and W. P. Murdock, “Selective
Maintenance Modeling for Industrial Systems,” Journal
of Quality in Maintenance Engineering, 2001, Vol. 7, No.
2, pp. 104-117. doi:10.1108/13552510110397412
[3] C. R. Cassady, W. P. Murdock and E. A. Pohl, “Selective
Maintenance for Support Equipment Involving Multiple
Maintenance Actions,” European Journal of Operational
Research, Vol. 129, No. 2, 2001, pp. 252-258.
doi:10.1016/S0377-2217(00)00222-8
[4] C. R. Cassady, E. A. Pohl and J. Song, “Managing Avail-
ability Improvement Efforts with Importance Measures
and Optimization,” IMA Journal of Management Mathe-
matics, Vol. 15, No. 2, 2004, pp. 161-174.
doi:10.1093/imaman/15.2.161
[5] A. Prekopa, “Stochastic Programming,” Series: Mathe-
matics and Its Applications, Kluwer Academic Publishers,
Dordrecht, 1995.
[6] A. Charnes and W. W. Cooper, “Deterministic Equiva-
lents for Optimizing and Satisfying under Chance Con-
straints,” Operations Research, Vol. 11, No. 1, 1963, pp.
18-39. doi:10.1287/opre.11.1.18
[7] S. S. Rao, “Optimization Theory and Applications,” Wiley
Eastern Limited, New Delhi, 1979.
[8] A. Prekopa, “The Use of Stochastic Programming for the
Solution of the Some Problems in Statistics and Probabil-
ity,” Technical Summary Report #1834, University of
Wisconsin-Madison, Mathematical Research Center, Ma-
dison, 1978.
[9] S. Uryasev and P. M. Pardalos, “Stochastic Optimization,”
Kluwer Academic Publishers, Dordrecht, 2001.
[10] F. Louveaux and J. R. Birge, “Stochastic Integer Pro-
gramming: Continuity Stability Rates of Convergence,”
In: C. A. Floudas and P. M. Pardalos, Eds., Encyclopedia
of Optimization, Vol. 5, Kluwer Academic Publishers,
Dordrecht, 2001, pp. 304-310.
[11] G. B. Dantzig, “Linear Programming under Uncertainty,”
Management Science, Vol. 1, No. 3-4, 1955, pp. 197-206.
doi:10.1287/mnsc.1.3-4.197
[12] A. Charnes and W. W. Cooper, “Chance Constrained
Programming,” Management Science, Vol. 6, No. 1, 1959,
pp. 73-79. doi:10.1287/mnsc.6.1.73
[13] V. A. Bereznev, “A Stochastic Programming Problem
with Probabilistic Constraints,” Engineering Cybernetics,
Vol. 9, No. 4, 1971, pp. 613-619.