H. B. Zhu et al. / Natural Science 3 (2011) 301-306
Copyright © 2011 SciRes. OPEN ACCESS
303
lation.
3) Make selection of the best-fit individuals for re-
production.
4) Breed new individuals through crossover and
mutation operations to give birth to offspring.
5) Evaluate the individual fitness of new individuals.
6) Replace least-fit population with new individuals.
3.2. GA in the PF Process
The particles degeneration phenomenon is a wide-
spread problem of particle filter algorithm. In order to
eliminate that phenomenon, the re-sample algorithm is
introduced as depicted in the Section 2. In the re-sam-
pling process of regular particle filtering, the particles
with bigger weights will have more offspring, while the
particles with smaller weights will have few or even on
offspring. It inspires us to reduce the number of particles
with small weights and find more particles with big
weights, which will make the proposal distribution more
closed to the poster distribution. But re-sampling algo-
rithm causes another problem which loses particle diver-
sity and reduces the performance of the particle filter
algorithm, and even makes the distribution function of
particle filter algorithm spread. Therefore GA is pro-
posed in PF process.
The choice of fitness function is the most important
issue of using genetic algorithm. In the proposed algo-
rithm, each particle in particle algorithm is looked upon
a pair of chromosome. We want to find more particles
with bigger weights, so the fitness can be chosen as the
value of weights directly. As usually the aim of GA al-
gorithms is to minimize the fitness function, so the fit-
ness is the minus value of particle weight in the GA-PF
as follows:
1
0: 11:
ˆ
ˆˆ ,
iii
ttt t
i
tii
tt t
pyxpxx
fitness
qx xy
(8)
Secondly, it’s already so large to compute consump-
tion of particle filtering that the GA process computing
consumption introduced should be reduced. In the
GA-PF algorithm, for every particle, at first, a random
number in the range of 0 and 1 will be generated, and
only when the number is smaller than a predefined
threshold, the GA process can be conducted. A new type
of GA process – one step predefined GA is introduced.
In this process, only when the new location is better than
the original one, the particle will move to the new one,
and the location updating process will be conducted only
one time in each particle filtering generation. The new
particle is then used in the next iteration of the algorithm.
Commonly, the algorithm terminates when either a
maximum number of generations has been produced, or
a satisfactory fitness level has been reached for the par-
ticle.
Finally, the location of best particle determines the
direction of particle updating in current generation and
itself location. And as in the one-step predefined GA
process, particle need not remember its individual best
location of history; the updating mode uses the social
only mode of GA algorithm.
3.3. The GA-UPF Algorithm
In this section, a brief description of UPF is presented
as follow:
11
ijij ij
xtxt vt
(9)
max min
max
max
t
wwt
ww g
(10)
The mentioned one-step predefined GA process is
used in the UPF algorithm. The information of UPF al-
gorithm can be found in [3,4]. Where
1, 2,,jDn,
1, 2,,in, n is the size of the
population and Dn is the Dimension of the space sear-
ched; w is the inertia weight, generally updated as
Eq.3 [4], and max
is the maximal evolution genera-
tions. 1
c and 2
c are two positive constants. And the
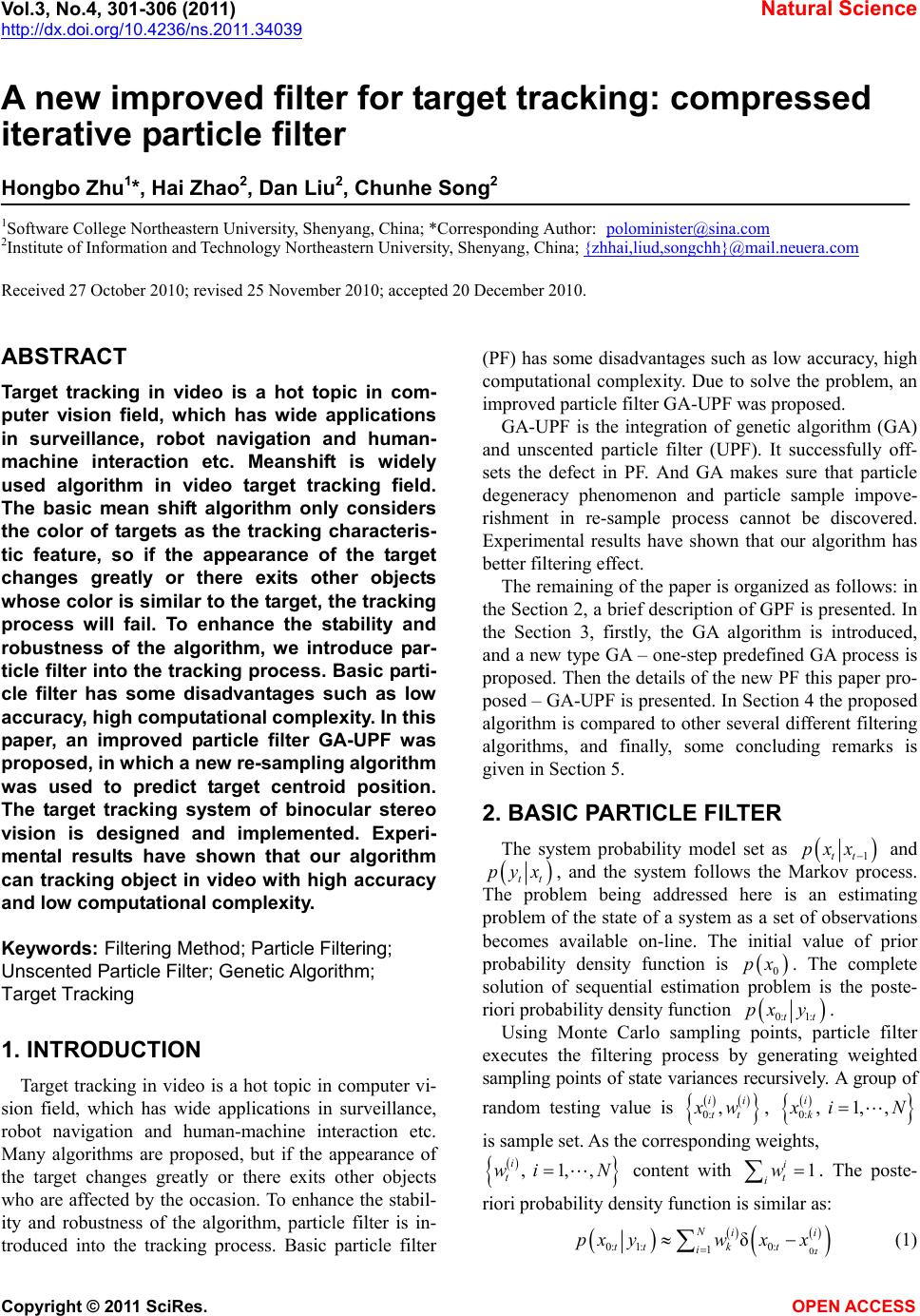
GA-UPF algorithm can be decried as Figure 2.
The detailed process of GA-UPF is as follow:
1) Initial chromosome sample: Draw the new particle
group
, 1,2,,
i
t
iNfrom the prior
1tt
pxx
;
2) Assign weights: Every kind of GA has to find an
effective coding scheme. Real matrix encoding is ap-
plied to estimate the parameters for sequential UPF al-
gorithm.
For each loop:
3) Selection: The fitness of each chromosome set as
measuring probability in [5], and using Roulette Wheel
Selection which the most commonly methods to choose
the higher fitness chromosomes, the terminal chromo-
somes is the model of offspring;
4) Crossover: At this stage, arithmetic crossover is
widely used for the chromosome encoded by Real matrix.
In arithmetic crossover, a pair of new individual is gen-
erated by the linear combination of a pair of parent indi-
vidual:
1
1
ii j
tt t
ji
tt t
xx
xx
(11)
Here
0, 1
, ,
ij
tt
x is the pair of parent indi-
vidual
,
ij
tt
x
is the pair of new individual
5) Mutation:
is a random real;