M. A. Choukou et al.
• “Barefoot”
• Shod with a standard and low cost safety shoes (“Lambda”)
• Shod with a standard and high cost safety shoes (“Oregon”)
• Shod with a Masaï Barefoot Technology shoes (“MBT”)
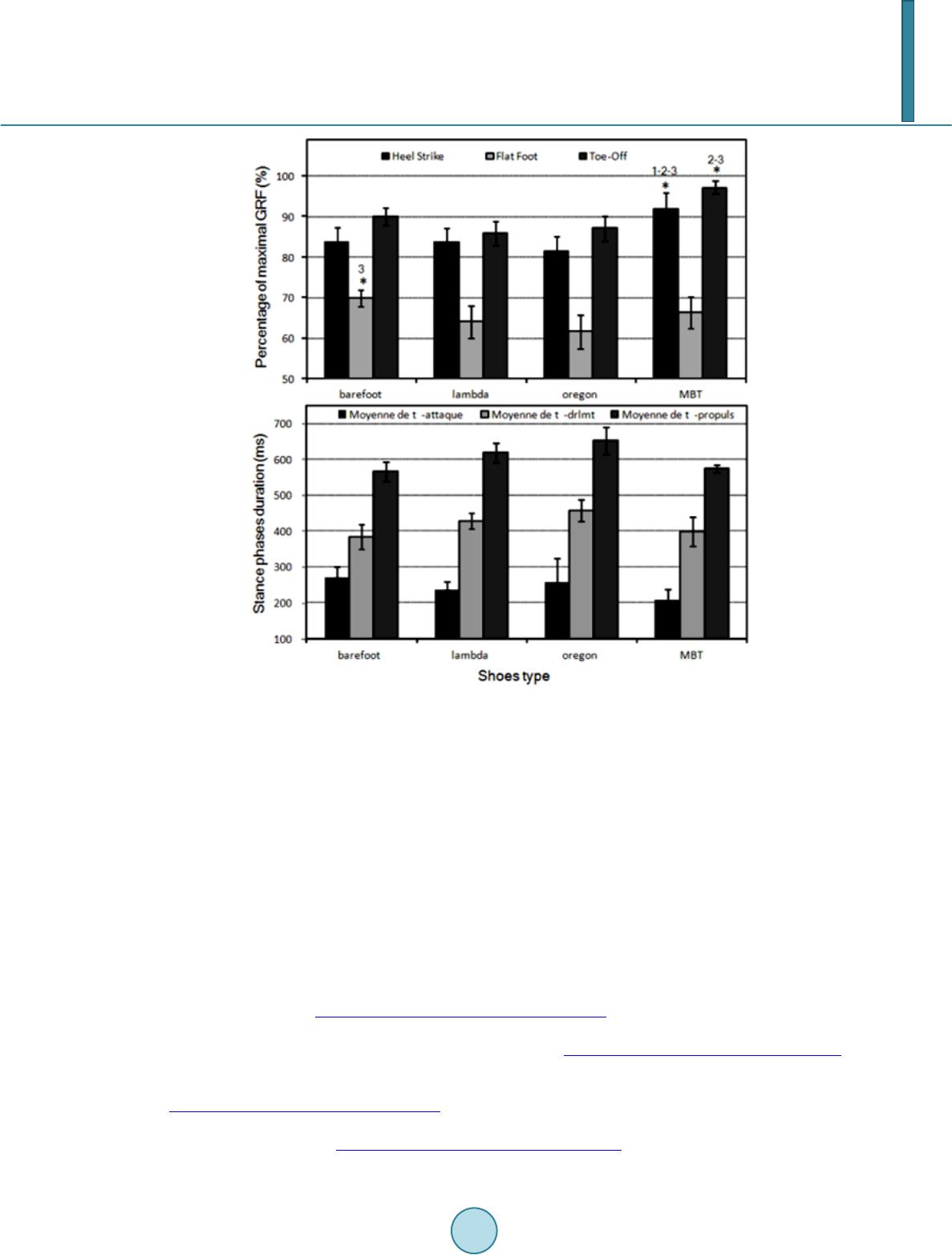
The main outcome measurements were the amount of ground reaction force (GRF) exerted during the heel
strike, flat foot and toe-off phases of each step. The pic GRF of each phase has been further normalized as a per-
centage (%) of the pic obtained for the entire step. These stance characteristics have been averaged for all steps
of a same trial and for both right and left legs. The corresponding temporal durations have also been took into
account as percentage with the same considerations.
2.2. Measurement Device
In this study, walking has been evaluated using a walking track, a “Win-Track” (Medicapteurs Technology,
Balma, France) platform (length × width × height dimensions, 1610 mm × 652 mm × 30 mm; thickness, 9 mm;
number of sensors: 12 288, sensor dimension, 7.8 × 7.8 mm2; acquisition frequency 200 Hz) which is a foot
pressure sensitive walkway dedicated to static, postural, and gait analysis was used. Walking cycle are deduced
from the two steps recorded when the participant walk over the track. A prestructured test protocol was followed
to ensure feasibility, accuracy and repeatability of the measurements. Furthermore, the device has been pre-
viously validated by Ramachandra et al. (2012) [8] and its use is one of the gait analysis protocols developed in
our laboratory of biomechanics [9].
2.3. Statistical Analyses
The study design adopted was a single group repeated measures design. All statistical analyses were performed
using STATISTICA, version 7 (Statsoft, Tulsa, OK). As data normality was checked, a repeated-measures anal-
ysis of variance with Fisher’s post-hoc test was performed to establish if there were significant differences be-
tween the characteristics of stance phases in function of the four shoeing conditions. The α level was set at 0.05.
3. Results
The results are shown in Figure 2. The main results show that temporal parameters of the stance phases did not
change between the three different shoeing conditions. However, the percentages of ground reaction force
changed between the four conditions (p < 0.05). The force of heel strike while equipped by a MBT shoes is 8 to
10.1% higher than all the conditions. That was also the case for the toe-off values which were 10 to 11.3% high-
er for MBT conditions as shown in Figure 2. The results showed the main role of unstable (convex) shoes in in-
creasing the muscle activity of the worker compared to standard safety footwear. Besides, high cost and low cost
safety shoes did not show any significant effects on stance parameters. So, it is clear that the safety shoes price
cannot insure the better body balance during work.
4. Discussion and Conclusion
It is well known that most of handling workers have problems relating to their feet, legs and low back. These
problems are highest with workers who are standing many hours per working day. A correlation exists between
these complaints and general worker fatigue. Absenteeism and decreased productivity have a negative impact on
labour costs and results. Worker injuries could result in (long term) absenteeism, decreased productivity or even
liability claims. These factors have a negative impact on costs and yield. The aim of the current study was to de-
termine whether wearing highly unstable safety shoes modify the walking pattern by increasing muscular activ-
ity as advocated by the manufacturer. The obtained results showed that when equipped with convex shoes, the
feet and therefore also the body move to keep the balance necessary to maintain upright position by increasing
the adaptation of the muscle activity. To reiterate, the major outcome of the experiment was that force exerted
on the ground during the heel strike is higher while wearing Masaï Barefoot Technology shoes which were the
most unstable footwear. This seems to have a blocking effect which results in higher force exerted at the end of
the stance while the foot switches from heel strike to toe-off. Surprisingly, the forces observed during flat foot
phase remained unchanged and the duration of flat foot did not vary according to this “artificial” swing as one
could speculate. These findings are in accordance with the literature [4]-[7] s howing the benefits of unstable