P.-M. Nicolae et al.
Results a factor of safety in heating of 67.96/175 = 0.388, which shows that the sizing of cooling conditions
has been rigorously made, without large reserves and so without undue consumption of materials and within a
minimum possible size.
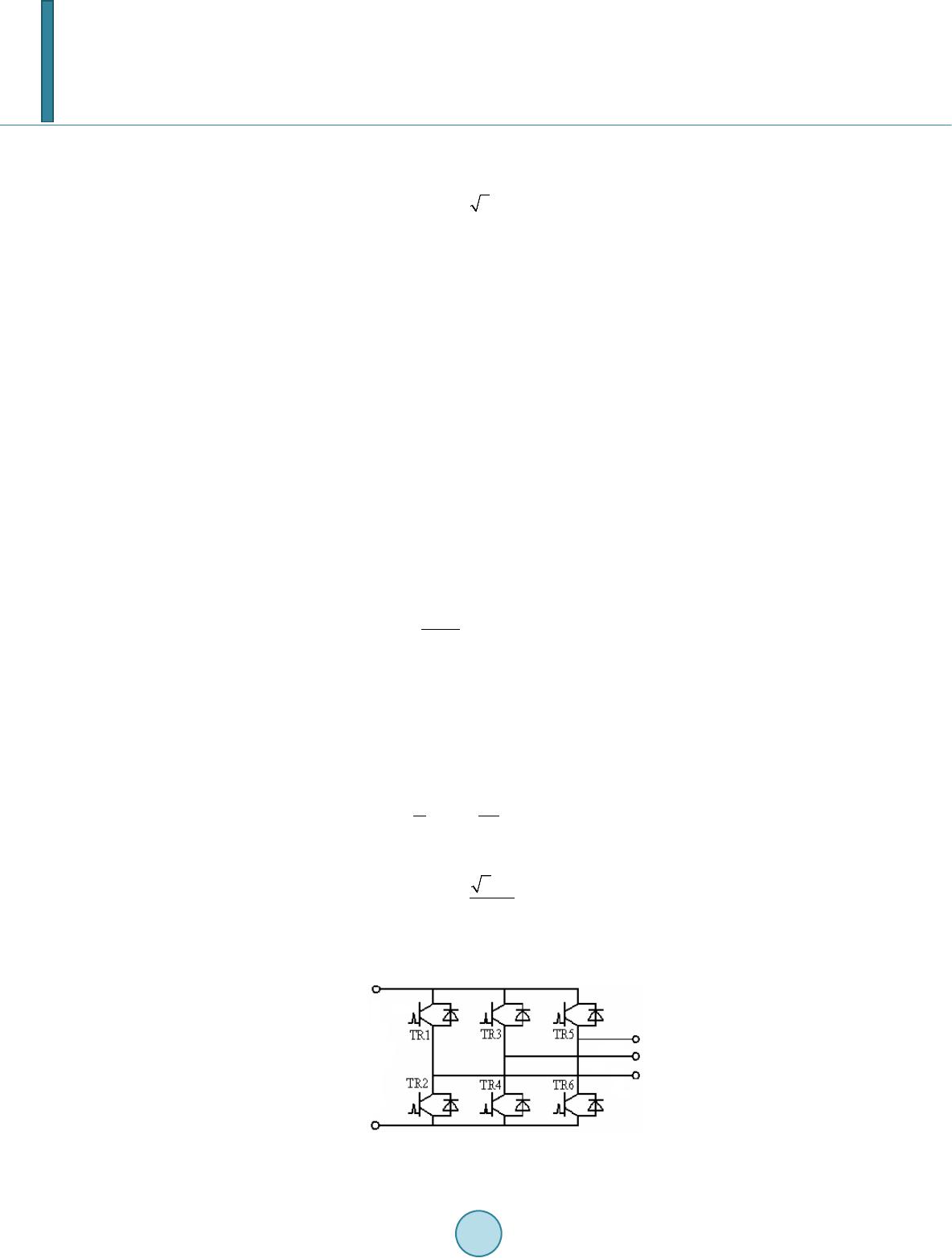
For reliability an IGBT transistor was chosen with rated data higher than those considered to be adequate to
the rated data of the induction motor.
Evaluating the results obtained by the sizing methods is observed that an optimal configuration was used [22].
6. Conclusions
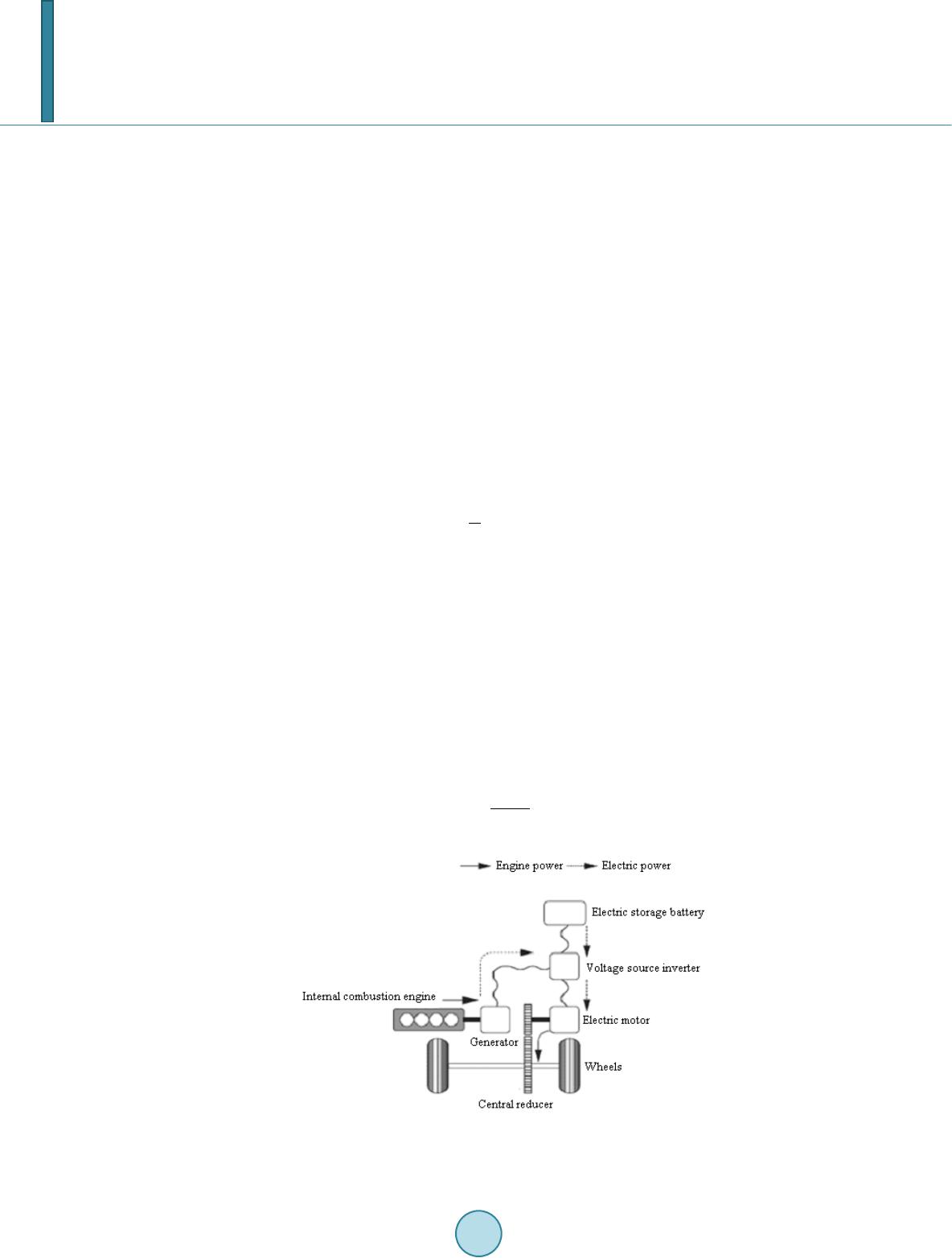
The paper was intended for a study on hybrid electric vehicle driving systems and on electric storage batteries
they use. The advantages of the electric drive system with the induction motor and voltage source inverter re-
vealed that it satisfies the requirements of the present application. The drive systems based on the induction mo-
tor will eliminate the most disadvantages of DC drive systems.
The results obtained from the designing algorithm of the induction motor show that an optimal configuration
was used.
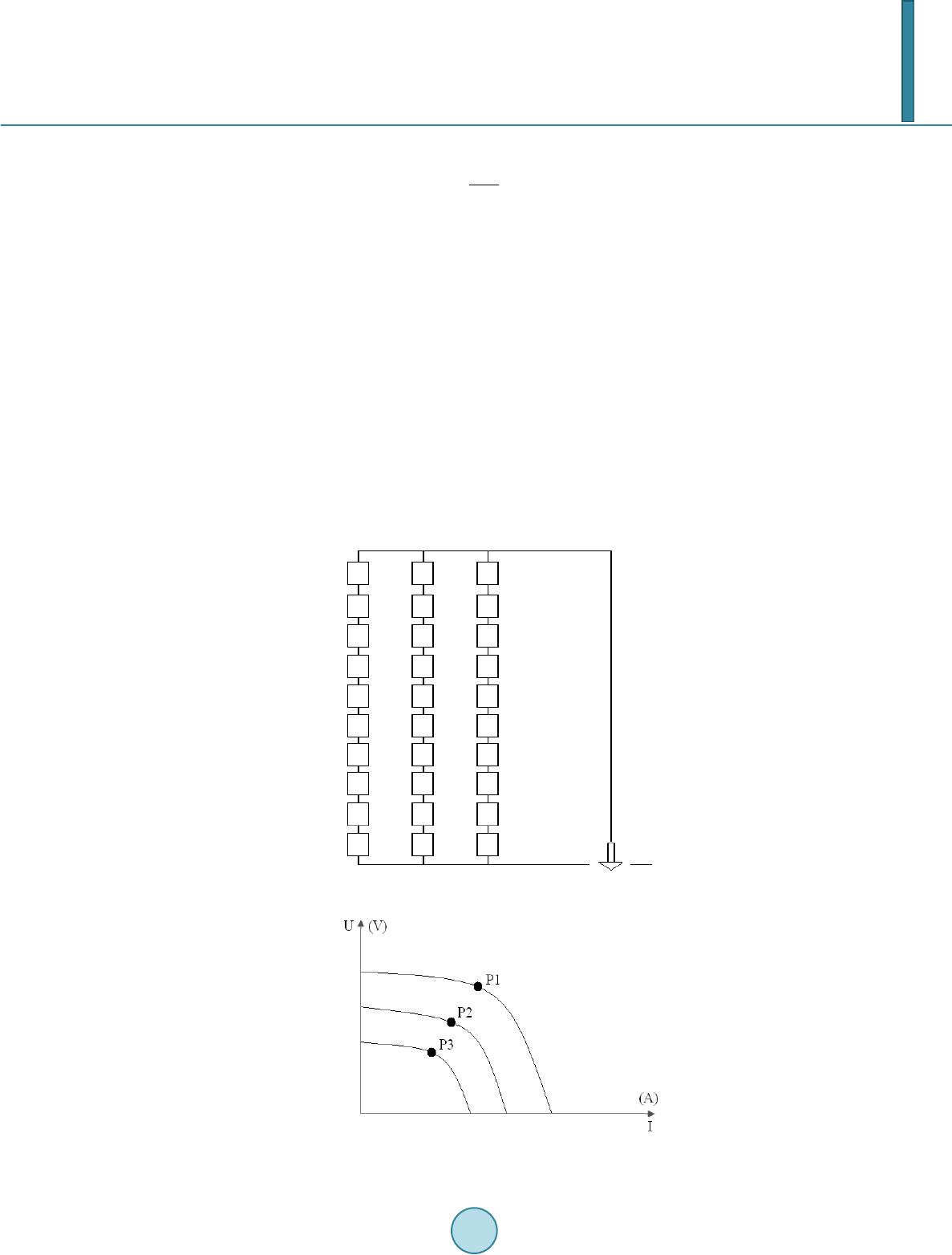
In the paper was also presented a sizing algorithm for the power components of the voltage source inverter.
Choosing of the power semiconductor devices was made from the data catalog of a producer of electronic com-
ponents and the results obtained by computing were in good agreement with those from the catalog.
One can conclude that is possible to design propulsion system for a hybrid electric vehicle with the given
rated data for the specified application and the required performance.
Given that the conventional means of transport (with internal combustion engine) are the main source of
chemical and noise pollution on the planet, h ybrid electric transportation systems are a more viable alternative
for transporting people and goods.
References
[1] EIA (2012) Short Term Energy Outlook March 2012. U.S. Energy Information Administration.
[2] IEA (2010) World Energy Outlook 2010. International Energy Agency, Paris.
[3] Klass, L.D. (1998) Biomass for Renewable Energy, Fuels and Chemicals. Elsevier Inc., Philadelphia.
[4] BP (2011) BP Statistical Review of World Energy June 2011.
[5] IEA (2011) Key World Energy Statistcs 2011. International Energy Agency, Paris.
[6] Brown, S., Pyk ea , D. and Steenhof, P. (2010) Electric Vehicles: The Role and Importance of Standards in an Emerging
Market. Energy Policy, 38, 3797-3806. http://dx.doi.org/10.1016/j.enpol.2010.02.059
[7] Woods, L.R. and Lawrance, K.L. (2013) U.S. Department of Energy—Energy Efficiency and Renewable Energy.
http://www1.eere.energy.gov
[8] Hori, Y. (2004) Future Vehicle Driven by Electricity and Control-Research on Four-Wheel-Motored UOT Electric
March II. IEEE Transactions on Industrial Electronics, 51, 954-962. http://dx.doi.org/10.1109/TIE.2004.834944
[9] Chan, C. (2002) The State of the Art of Electric and Hybrid Electric. Proceedings of the IEEE, 90.
[10] Naito, S., Mutoh, N., Takagi, T. and Kouchi, Y. (1995) AC Drive Systems for Electric Vehicles. Hitachi Review, 77.
[11] Yamamura, H., Masa ki, R., Koizumi , O., Naoi, K. and Naito, S. (1992) Development of Powertrain System for Nissan
FEV. Proceedings of the 11th Electric Vehicle Symposium, Florence.
[12] Katrasnik, T. (2007) Hybridization of Powertrain and Downsizing of IC Engine—A Way to Reduce Fuel Consumption
and Pollutant Emissions—Part 1. Energy Conversion and Management, 48, 1411-1423.
http://dx.doi.org/10.1016/j.enconman.2006.12.004
[13] Clondescu, Gh. and Tomuta, O.D. (1977) Electric Ac cumulators, Maintenance and Repair (Acumulatoare Electrice,
Intretinere si Reparare—In Romanian). Universitatea Tehnica de Constructii Bucuresti.
[14] Corrigan, D., Menjak, I. and Dhar, S. (2000) Nickel -Metal Hydride Batteries for ZEV-Range Hybrid Electric Vehicle.
PNGV Future Truck Technical Report, University of California.
[15] Noreus, D. (2000) Substitution of Rechargeable NiCd Batteries, a Background Document to Evaluate the Possibilities
of Finding Alternatives to NiCd Batteries. Arrhenius Laboratory, Stockholm University.
[16] Câmpeanu, A., Vlad, I. and Enache, S. (2011) Aided Design of Electrical Machines (Proiectarea Asistata a Masinilor
Electrice—In Romanian). Universitaria, Craiova.
[17] Buja, G. , Casadei, D. and Serra, G. (1998) Direct Stator Flux and Torque Control of an Induction Motor: Theorethical