Paper Menu >>
Journal Menu >>
 Intelligent Control and Automation, 2011, 2, 31-37 doi:10.4236/ica.2011.21004 Published Online February 2011 (http://www.SciRP.org/journal/ica) Copyright © 2011 SciRes. ICA Nonlinear Steam Valve Adaptive Controller Design for the Power Systems Nan Jiang, Xiangyong Chen, Ting Liu, Bin Liu, Yuanwei Jing Faculty of Information Science and Engineering, Northeastern University, Shenyang, China E-mail: jiangnan@ise.neu.edu.cn Received October 21, 2010; revised December 9, 2010; accepted January 10, 2011 Abstract Considering generator rotor and valve by external disturbances for turbine regulating system, the nonlinear large disturbance attenuation controller and parameter updating law of turbine speed governor system are designed using backstepping method. The controller not only considers transmission line parameter uncer- tainty, and has attenuated the influences of large external disturbances on system output. The nonlinear con- troller does not have the sensitivity to the influences of external disturbances, but also has strong robustness for system parameters variation, which is because of the transmission line uncertainty being considered in internal disturbances. The simulation results show that the control effect of the large disturbance attenuation controller more advantages by comparing with the control performance of conventional nonlinear robust controller. Keywords: Power Systems, Steam Valve Control, Large Disturbance Attenuation, Backstepping, Adaptive 1. Introduction With the development of large interconnected power systems and the use of kinds of new equipment, the size and complexity of power systems is increased, and it is inevitable that there have the influences of disturbances on the operation of power system. Meanwhile, owing to the inaccuracy of the model, the error of the parameters of the control object designed and the error of the meas- urement components of the controller also form the gen- eralized disturbance of power system [1]. In order to improve the transient stability level of power system, and prevent an electric power system losing synchronism under a large sudden fault by closing the turbine regulat- ing valve quickly to reduce the output of prime mover instantaneously, it is essential to design the strong ro- bustness nonlinear steam valve controller to improve its reliability. In recently years, various advanced nonlinear control technologies have been applied to excitation and steam valve controllers of power systems. Through careful in- vestigation it is easy to see that most of these are based on some different control methods. However, these con- trollers suffer some flaws. Robust adaptive controller and nonlinear stabilizing controller of steam valve and exci- tation system design method are presented based on Hamiltonian energy theory in [2,3], but it is difficult to solve the Hamilton-Jacobi-Issacs (HJI) inequality. In order to avoid solving the HJI inequality, Lu [1] de- signed the nonlinear L2 gain disturbance attenuation ex- citation controller based on recursive design method for the external disturbance attenuation problem. Li [4] de- veloped a multivariable inverse nonlinear control scheme for strongly nonlinear reheat type turbo generator steam valves, which provides whole range control to improve the transient power system stability. In [5-7], the turbine governor and excitation controller design method using no linearization methods when system parameters are precisely knowable are proposed, but the robustness of the parameters and model was not considered. For a sin- gle-machine infinite -bus system, Wang [8] designed a nonlinear robust integrated controller and a parame- ter-update law is obtained based on adaptive backstep- ping methods and Lyapunov functions of the system. The controller also has strong robustness for system parame- ters variation because damping coefficient uncertainty has been considered. In order to prevent an electric power system losing synchronism under a large sudden fault and to achieve voltage regulation, Wang [9] applied the Riccati equation approach, together with the direct feedback linearization (DFL) technique to design robust nonlinear controllers for transient stability enhancement  N. JIANG ET AL. Copyright © 2011 SciRes. ICA 32 and voltage regulation of power systems under a sym- metrical three-phase short circuit fault. Sun [10] de- signed the nonlinear adaptive controllers and parameter updating laws of the switch subsystems using the pro- posed modified adaptive backstepping method for a sin- gle- machine-infinite-bus system, the control input con- straints are solved by introducing a switched mechanism. In [11-13], the nonlinear adaptive controllers and pa- rameter updating laws for a single-machine-infinite- bus system with damping coefficient uncertainties in the tur- bine steam valve control also are proposed. However, the influences of the external unknown disturbances are not considered. Thus, how to effectively deal with the influ- ences of the external unknown disturbances on system output for the origin system is valuable to be further studied. Thus, in this paper we use the backstepping method to design the nonlinear disturbance attenuation controller and parameter updating law of turbine speed governor system for the uncertainty of transmission line parame- ters and the influences of large external disturbances on system output. In the design process, the influences of disturbances are considered while it does not use any linearization methods. Thus, the nonlinear controller does not have the sensitivity to the influences of external disturbances, but also keep the nonlinearities of systems. The simulation result demonstrates that the disturbance attenuation controller possesses superior performances by comparing with the control performance of conven- tional nonlinear robust controller. The design procedure based on the adaptive backstepping method is systematic and concise, it is believed that this method can be ac- cepted with a considerable ease by engineers. 2. Model and Problem Statement Consider the following single-machine infinite-bus sys- tem with steam valve control and the configuration of whole system is shown in Figure 1. Then the model of main steam-valve control system is expressed as follows [11]: Δδ, Δω, ΔP m Figure 1. A single-machine infinite-bus system with the steam valve control. 0 0 0e 0 1 HMLm D HHHmH H PCP PP H PPCPCu T (1) where is the rotor angle of generator. is the rotor speed of generator. m P, e P, D P, H P are mechanical power of prime motor, active power of generator, damp- ing power and mechanical power generated by high- pressure cylinder, respectively. H is the inertial coeffi- cient of generator. H T is the equivalent time constant of valve control, the value is about 0.4. H C is the dis- tribution coefficient of high-pressure turbine, it is about 0.3. M L C is the distribution coefficient of middle and low-pressure turbine power, it is about 0.7. 0m P is the initial value of mechanical power, 00me PP. u is the steam-valve control. And we know that: ' 0 ' 0 sin, qS eD d EV D PP X (2) where D and ' q E are damping coefficient and transient EMF of generator q axis, respectively. S V is the infinite bus voltage. ' d X is the equivalent reactance between generator and infinite bus system. Next, we will research the design of the controller when the parameter ' d X is unknown. For system (1), in order to transform it into the appropriate form in back- stepping design, let 10 x , 20 x and 30mm x PP , where 0 , 0 , 0m P are the initial value of corresponding variables, then system (1) can be re- written as follows: 12 0 22300 3300 1 mMLme mHmH H xx D x xxPCPP HH xxPCPCu T (3) Let 1 D k H , 0 2 k H , 1 H TT , 0 a 0 00mMLm PCP H , H H C CT , and they are known constants. Further, let ' 0 ' qS d EV HX and they are unknown parameter because of ' d X . Fi- nally, consider the exogenous disturbance 12 T , where 1 and 2 is the disturbance on generator rotor and steam valve, respectively. Then system (3) is trans-  N. JIANG ET AL. Copyright © 2011 SciRes. ICA 33 formed into: 12 x x (4) 212 2302011 sinxkxkxa kx (5) 3302 xTxb Cu (6) 11 22 qx Zqx (7) where 112 2 T Z qx qx is regulation output; 1 q and 2 q are the non-negative weight coefficient, which rep- resent the weighted proportions between 1 x and 2 x . Now we can note that the system (7) is a control sys- tem with parametric uncertainties and unknown control gain, as well as unknown bounded exogenous distur- bances. Our control objective is to keep the rotor stable and the system states are stabilized simultaneously. 3. Design of Nonlinear Adaptive Controller with Large Disturbance Attenuation For the controlled object with the uncertain parameters and external disturbances, we can use the adaptive back- stepping method to design the nonlinear robust controller of steam valve. We can design a suitable controller u by constructing the storage function Vx, and then the system satisfies: 22 2 0 0T VxtVxz dt where any 0T, the 2 L gain of system less than , and is the disturbance attenuation constant. Noticing the above-mentioned facts, the analysis method and design process of controller can be summa- rized as follows: Step 1: For subsystem (4), let 2 x as the virtual con- trol, and take stabilizing function * 211 x cx, 10c is a design constant; suppose 11 ex, * 222 exx, then subsystem (4) can be expressed as 1211 eecx Via taking the first Lyapunov function candidate as 2 11 2 Ve (8) where 0 , then the time derivative of 1 V found is 2 1111211 1211 Veeeece eece (9) Step 2: By augmenting (9), the new Lyapunov func- tion can be formed as 2 21 2 1 =+ 2 VV e (10) Suppose that 22 2 12 1 1 2 HV Z (11) and the performance index can be supposed as follows, 22 2 11 0 J Zdt then one gets 22 2222 121112 1 2 12 11 21223020 11 2 2222 2 21 21 122111 1 2 sin 11 1 22 2 H Vqxqx ee ce ekxkxakx ecxqeq ece (12) By deviating (12) about 1 and supposing the first derivation is equal to 0, we can get 2 21 0e then (13) can be obtained as follows, * 12 2 1e (13) We continue to find the second derivation of (12), one gets 22 1 2 1 0 2 H Then there is the maximum value of 1 H about 1 . 22 2 12 1 1 max max2 HVZ (14) Now get the integral both sides of (14), we can get 1 0 22 2 21 00 max 1 max 2 Hdt Vdt Zdt Let 11 0 H Hdt , then 1 122 maxmax0 2 J HVV Owing to 1 12 2 J H V , one gets 1 12 12 max max 2 max min J H V HV Remark 1: Suppose that the disturbance 1 makes 2 V reduce to 0, i.e. 2 min 0V, that is, when the  N. JIANG ET AL. Copyright © 2011 SciRes. ICA 34 systems have the sufficiently large disturbances, 2 V is not reduced, and then, 1 max 2J is equivalent to 1 max H , so 1 is really the worst disturbances for system. Remark 2: Based on the equivalent analysis of 1 max H and 1 max 2J, 1 make 1 H get the maximum value means that 1 makes 1 J also obtain maximum. While our ultimate goal is to make 1 J minimum, then explain 1 on the system's performance damage is the largest. If we substitute disturbances with such damage degree into systems, based on which we design the controller, and ensure the stability of the closed-loop system. Thus it shows that the system is not sensitivity for the influences of disturbances in theory. Substituting (13) into (12), there is 2 11211 212230 201 22 22 22 2122 1122 2222 2211211 sin 111 222 1 2 Heece ekxkxakx ecxe qe qe qece qce Suppose that 222 1112 1 2 1211 2 2 2121 2 11 , 22 11 , 22 11 2 2 cq qc hqcc hcqk Then 2 1121122230201 sin H eehxhxkxa kx Consider 3 x as the virtual control, and define that * 333 exx, then choosing the new virtual stabilization function as follows, * 31122020122 2 1sin x hxh xakxce k Let 12 01 sinnk x , where 2 c is a positive num- ber to be selected. * 311220122 2 1 x hxh xance k We can obtain 22 11222201 sin H eceek x where , is the estimated value of . Step 3: By augmenting 2 V, the new Lyapunov func- tion can be formed as 22 32 3 11 22 VV e (15) where 0 is the adaptive gain coefficient. Define that 22 2 23 1 2 HV Z and the performance index as follows, 22 2 20 J Zdt Because 3233 1 VVee , and * 31122212122 2 112212 230 2 2022 12122 2 1 1 1 sin xhxhcxnnccx k hxhckxk xa k kkennccx one gets 22 22222 2 23311 221 2 22 22 12222 012 330231222 2 12 23 02012 2 12 11 1 22 11 sin2 1 1 sin HVeeqxqx eceekx eTx bcuehxhc k kxkxakxe nnc 12 2 cx (15) By deviating (15) about 2 and supposing the first derivation is equal to 0, we can get * 23 2 1e (16) To find the second derivation of (15), we can obtain 22 2 2 2 0 2 H , So there is the maximum value of 2 H about 2 . Then, we know that * 2 is the most disturbance of sys- tem to make a performance cost 2 J be the largest value. Substituting (16) into (15), then 22 21222201 33 303 22 sin 11 1 2 Heceek x eeTxbcue  N. JIANG ET AL. Copyright © 2011 SciRes. ICA 35 3 12221223 0 2 2 201 12122 2 sin ehxhckxk xa k e kx nnccx Choosing the feedback control as follows, 3 3012 22 2 2 2 12 23 011 2 212233 11 e uTxb hxhc ck e kxkxann nccxce then, 22 21222201 2 2 33 332 21 2 2 1 sin 2 Heceek x ee ceh cn k In order to ensure that 20H , suppose that 220 132 20 1 1 sinsin 0ekxehcx 2132 201 1sin 0enehcx Choosing the parameter update law 2132 201 sinene hcx By choosing the appropriate coefficient , so 0 , then 222 212233 0Hecece Let 3 2VxV x, one gets 22 2 Vx z (17) where 12 T . When 00x, we get the inte- gral both sides to satisfy the inequality (17), so there are the gain from disturbance to output. Remark 3: when the system operates normally, then 0 180 , and we can know that 01 sin x 0 , so the control is defined. Now get the integral both sides of (17), the dissipation inequality can be obtained as follows, 22 2 0 0T VxtVxz dt so there is L2 gain from disturbance to the output of sys- tem. And when 0 , the closed-loop error control sys- tem is asymptotic stable with the feedback control law u, then the closed-loop control system can be expressed as follows, 1211 1 2221 2 2 1121 3332 2 1123 2 1 2 22 eece n ecee k ckcn ece k ckce en kk (18) 4. Simulation Examples In this section, we firstly analyze the stability of the sys- tem by analyzing the state responses of system, which is generated by Simulink. Further, when the system pa- rameters change under the fault that occurs, we observe the stability time of system with the influence of nonlin- ear steam valve adaptive robust controller, so we can analyze the stability of nonlinear steam valve adaptive robust controller of power system based on adaptive backstepping method, and the bounded ness of the state of system and whether to suppress the influences of large external disturbances on system output also can be ana- lyzed. 4.1. Simulation of General Nonlinear Robust Controller In this subsection, we can give the simulation analysis of general nonlinear robust controller, and the transient re- sponding curves of the system output state and the con- troller output can be shown in Figure 2 and Figure 3. The general nonlinear robust steam valve controller can be designed using the general backstepping method. As this robust controller, the time of the stability of sys- tem is longer and it will keep a slow convergence. Moreover, it will maintain the small oscillation stability within a certain range, and the control is ineffective. x 1 Figure 2. The transient responding curves of the system state x1. 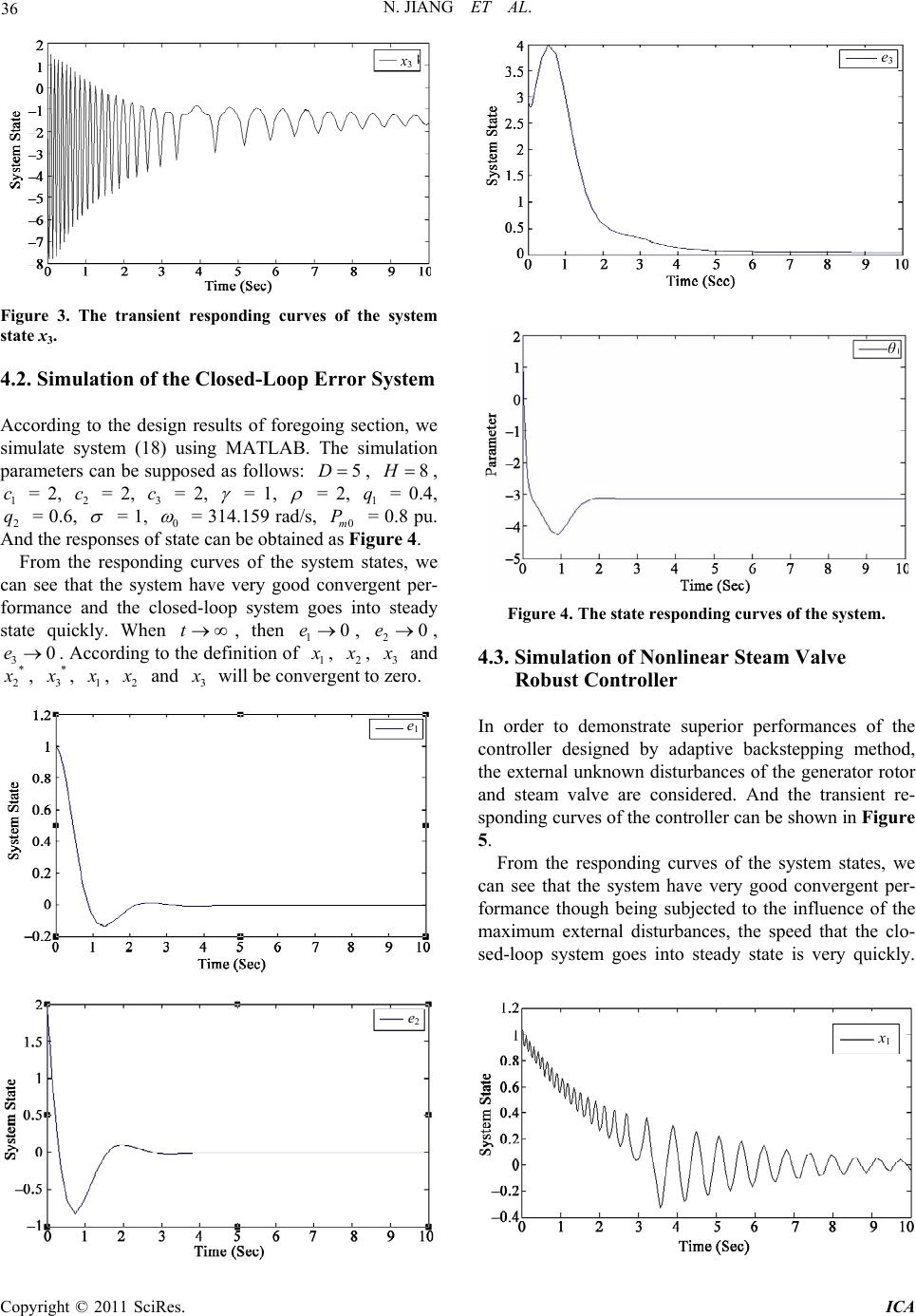 N. JIANG ET AL. Copyright © 2011 SciRes. ICA 36 x 3 Figure 3. The transient responding curves of the system state x3. 4.2. Simulation of the Closed-Loop Error System According to the design results of foregoing section, we simulate system (18) using MATLAB. The simulation parameters can be supposed as follows: 5D, 8H , 1 c = 2, 2 c = 2, 3 c = 2, = 1, = 2, 1 q = 0.4, 2 q = 0.6, = 1, 0 = 314.159 rad/s, 0m P = 0.8 pu. And the responses of state can be obtained as Figure 4. From the responding curves of the system states, we can see that the system have very good convergent per- formance and the closed-loop system goes into steady state quickly. When t , then 10e, 20e, 30e. According to the definition of 1 x , 2 x , 3 x and * 2 x , * 3 x , 1 x , 2 x and 3 x will be convergent to zero. e 1 e 2 e 3 θ Figure 4. The state responding curves of the system. 4.3. Simulation of Nonlinear Steam Valve Robust Controller In order to demonstrate superior performances of the controller designed by adaptive backstepping method, the external unknown disturbances of the generator rotor and steam valve are considered. And the transient re- sponding curves of the controller can be shown in Figure 5. From the responding curves of the system states, we can see that the system have very good convergent per- formance though being subjected to the influence of the maximum external disturbances, the speed that the clo- sed-loop system goes into steady state is very quickly. x 1 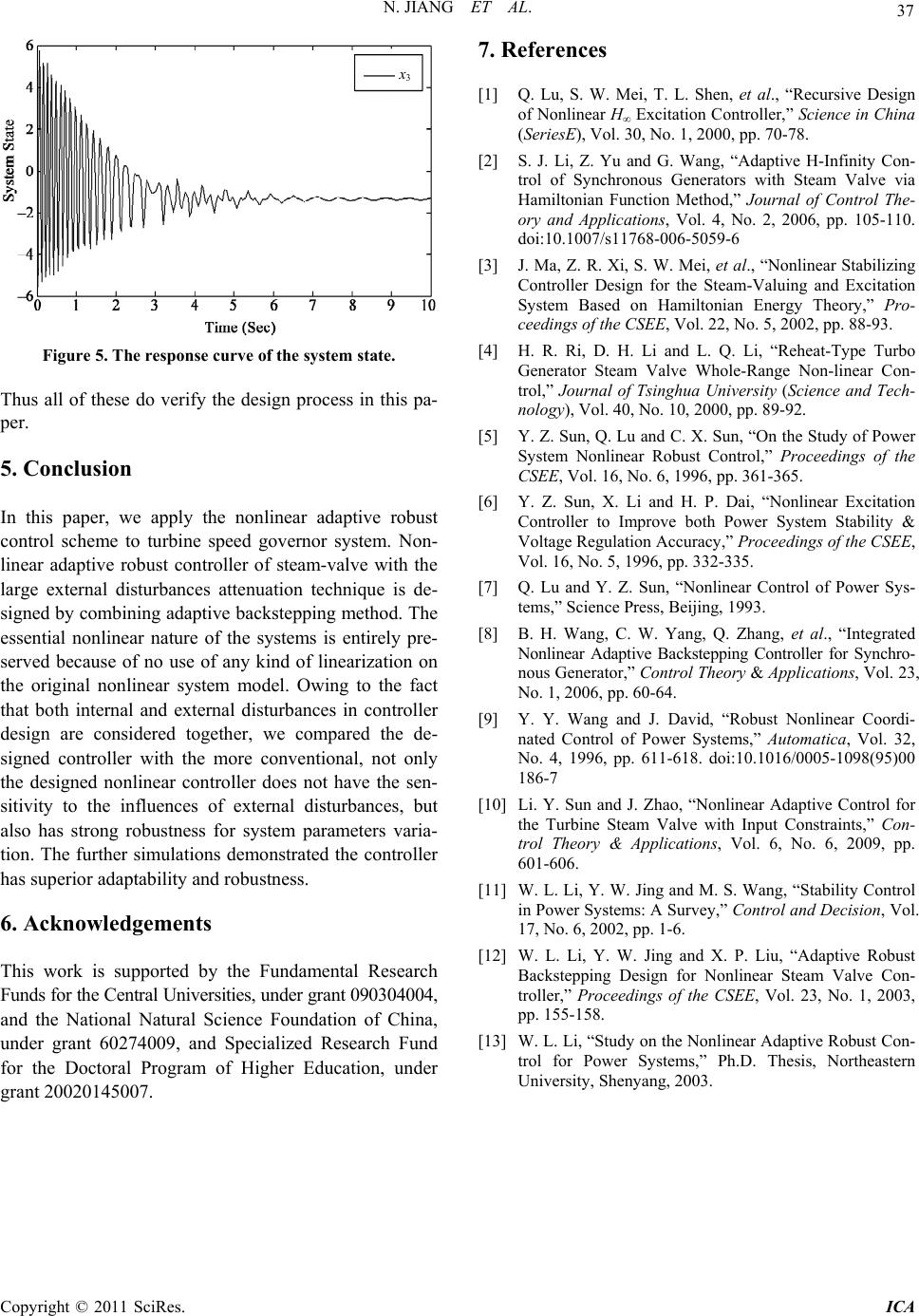 N. JIANG ET AL. Copyright © 2011 SciRes. ICA 37 x 3 Figure 5. The response curve of the system state. Thus all of these do verify the design process in this pa- per. 5. Conclusion In this paper, we apply the nonlinear adaptive robust control scheme to turbine speed governor system. Non- linear adaptive robust controller of steam-valve with the large external disturbances attenuation technique is de- signed by combining adaptive backstepping method. The essential nonlinear nature of the systems is entirely pre- served because of no use of any kind of linearization on the original nonlinear system model. Owing to the fact that both internal and external disturbances in controller design are considered together, we compared the de- signed controller with the more conventional, not only the designed nonlinear controller does not have the sen- sitivity to the influences of external disturbances, but also has strong robustness for system parameters varia- tion. The further simulations demonstrated the controller has superior adaptability and robustness. 6. Acknowledgements This work is supported by the Fundamental Research Funds for the Central Universities, under grant 090304004, and the National Natural Science Foundation of China, under grant 60274009, and Specialized Research Fund for the Doctoral Program of Higher Education, under grant 20020145007. 7. References [1] Q. Lu, S. W. Mei, T. L. Shen, et al., “Recursive Design of Nonlinear H∞ Excitation Controller,” Science in China (SeriesE), Vol. 30, No. 1, 2000, pp. 70-78. [2] S. J. Li, Z. Yu and G. Wang, “Adaptive H-Infinity Con- trol of Synchronous Generators with Steam Valve via Hamiltonian Function Method,” Journal of Control The- ory and Applications, Vol. 4, No. 2, 2006, pp. 105-110. doi:10.1007/s11768-006-5059-6 [3] J. Ma, Z. R. Xi, S. W. Mei, et al., “Nonlinear Stabilizing Controller Design for the Steam-Valuing and Excitation System Based on Hamiltonian Energy Theory,” Pro- ceedings of the CSEE, Vol. 22, No. 5, 2002, pp. 88-93. [4] H. R. Ri, D. H. Li and L. Q. Li, “Reheat-Type Turbo Generator Steam Valve Whole-Range Non-linear Con- trol,” Journal of Tsinghua University (Science and Tech- nology), Vol. 40, No. 10, 2000, pp. 89-92. [5] Y. Z. Sun, Q. Lu and C. X. Sun, “On the Study of Power System Nonlinear Robust Control,” Proceedings of the CSEE, Vol. 16, No. 6, 1996, pp. 361-365. [6] Y. Z. Sun, X. Li and H. P. Dai, “Nonlinear Excitation Controller to Improve both Power System Stability & Voltage Regulation Accuracy,” Proceedings of the CSEE, Vol. 16, No. 5, 1996, pp. 332-335. [7] Q. Lu and Y. Z. Sun, “Nonlinear Control of Power Sys- tems,” Science Press, Beijing, 1993. [8] B. H. Wang, C. W. Yang, Q. Zhang, et al., “Integrated Nonlinear Adaptive Backstepping Controller for Synchro- nous Generator,” Control Theory & Applications, Vol. 23, No. 1, 2006, pp. 60-64. [9] Y. Y. Wang and J. David, “Robust Nonlinear Coordi- nated Control of Power Systems,” Automatica, Vol. 32, No. 4, 1996, pp. 611-618. doi:10.1016/0005-1098(95)00 186-7 [10] Li. Y. Sun and J. Zhao, “Nonlinear Adaptive Control for the Turbine Steam Valve with Input Constraints,” Con- trol Theory & Applications, Vol. 6, No. 6, 2009, pp. 601-606. [11] W. L. Li, Y. W. Jing and M. S. Wang, “Stability Control in Power Systems: A Survey,” Control and Decision, Vol. 17, No. 6, 2002, pp. 1-6. [12] W. L. Li, Y. W. Jing and X. P. Liu, “Adaptive Robust Backstepping Design for Nonlinear Steam Valve Con- troller,” Proceedings of the CSEE, Vol. 23, No. 1, 2003, pp. 155-158. [13] W. L. Li, “Study on the Nonlinear Adaptive Robust Con- trol for Power Systems,” Ph.D. Thesis, Northeastern University, Shenyang, 2003. |