Journal of Geographic Information System
Vol.6 No.2(2014), Article ID:44570,6 pages DOI:10.4236/jgis.2014.62012
RSSI Enhanced Microkernel-Based LBS Design
Tingyan Xing1, Shang Zhang1,2, Fan Zhang3
1Faculty of Information Engineering, China University of Geosciences, Beijing, China
2College of Computer and Information Technology, China Three Gorges University, Yichang, China
3Zondy Cyber Group Co., Ltd., Wuhan, China
Email: xtygis@163.com, wetoo@163.com, zhangfan@mapgis.com
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


RSSI are observed RSS (Received Signal Strength) values averaged over a certain sampling period and usually specified as received power PR in decibels. Based on the attenuation model
ABSTRACT
Geographical Information System (GIS) always plays an integral role in LBS systems. But it comes with technology problems, such as less flexible, low efficiency, no redundancy of existing geographic information of application configuration which has high entry cost. At same time, indoors positioning is attracting more and more attention from research domain where GPS-like systems do not work. By RSSI location fingerprint data that sampling from the actual WSN environment, this article analyzed RF signal propagation characteristics in indoor from the point of view of the indoor positioning, and analyzed some factors that may affect the positioning error, which provided a theoretical basis for the positioning algorithm design and positioning system deployment. The aim of this paper is also to present a lightweight, efficient and scalable microkernel plug-in geospatial information application system and its implementation method for GIS in LBS design and practice. In this paper a software model called Resource loading manager (RLM) is designed. Through the RLM efficient allocation of geographic information resources and security management could be achieved.
Keywords:RLM, Microkernel, LBS, GIS

1. Introduction
In recent years, LBS (location-based services) were emerged with the development of position methods in wireless network communication, mobile computing and the Global Navigation Satellite Systems (GNSS). It resulted in a series of chain, and had created tremendous business value. A location sensing system responsible for locating a mobile user is a crucial factor for the success of services. However, several drawbacks hindered communities choose commercial software for implementing WSN Projects. Wireless sensor network is a new technology with a sort of sensation ability, computing power and the wireless communication ability. Through the analysis of the existing positioning algorithm of wireless sensor network, a new algorithm based on RSSI positioning is proposed and introduced. This algorithm can better solve the tracking location function. Meanwhile, the development of software systems in the way of “component” and “hierarchical”, which apply the technology of micro-kernel concept or ideas, is gradually introduced into software design framework for the “decoupling possible relationships between components”. At same time, open source strategy is an adequate mean to push current developments within the GIS and Spatial process domain, especially for the ongoing research and development topic “LBS”. The availability of Free and Open Source Software (FOSS) for Geographic Information systems (GIS) has increased tremendously in recent years.
2. Microkernel and RLM
2.1. Microkernel
The concept of Microkernel (micro kernel) was originally made for building microkernel operating system based on message passing mechanism, not for software architecture services [1] [2] . In recent years, as the development of software systems in style of “component” and “hierarchical”, micro-kernel technology has gradually been introduced into software design framework for the “decoupling possible relationships between components.” But in the field of GIS, microkernel-based system has not yet been established. But the way of microkernel based system provided several benefits that traditional GIS platform don’t have:
a) There is no need to develop new application systems to meet user changed needs;
b) Easy to modify the existing similar software systems.
In traditional way the efficiency of scheme a), b) is low. Even if there is a little small change, or users have new functional requirements, the engineers often need to re-develop system or modify the code. These will resulted in high development cost, and poor scalability.
For the government, enterprises, individuals and other different types of users which need a lightweight, efficient and scalable geospatial information operation support environment, this paper has established a geospatial information support platform based on microkernel architecture technology, including remote sensing data processing and open geographic information processing and mutual integration process, and provides a lightweight runtime environment. In this case, not only a lot of software purchase costs can be saved, but also a variety of personalized geospatial information processing demand can be meet [3] .
2.2. Resource Loading Manager
In order to ensure the reasonable resource management, a geospatial information application system based on micro kernel technology is designed in this paper. Geospatial information resource loading manager (RLM) which used to load the application of the plug-in function module of program could implement the business logic of the application program. The structure of the RLM is shown in Figure 1 [4] .
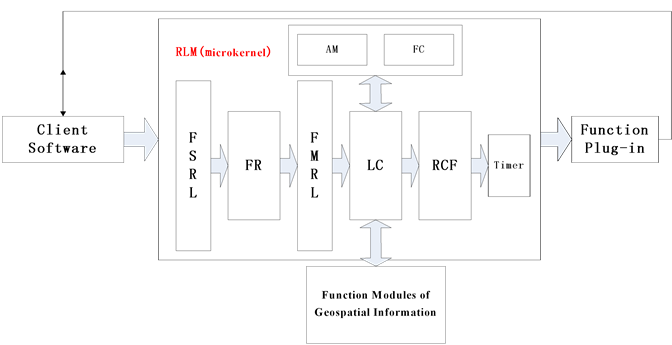
Figure 1. The structure of the RLM.
In Figure 1, FSRL (functional service requirements list) is used to count the resources required by the client software. The information includes at least: client software security level, the features of required resources, and the method of administration.
According to FSRL, FR (function resolver) puts the functional requirements of client software in accordance with the rules of the system function modules to subdivide, and builds functional modules list of requirements.
FMRL (functional modules requirements list) used to describe the function modules refined from the functional service requirements of client software.
LC (list counters) is used to allocate function modules according to FMRL.
RCF (resource configuration file) is used to identify all functional modules.
AM (access manager) is used to check the LC calls to functional modules permissions.
FC (function combiner) is used to package the function modules called by LC for plug-in, using for client software.
The Timer is used in one or more functional blocks occupied by other programs, and cannot be immediately called. The timer periodically detects the required permissions whether the function modules were released, and dynamically loaded them into the function plug-in when they were released.
3. Implementation
The basic idea of the method described above is: The process logic of programming system is implemented through a plug of expression of microkernel architecture. FR is used to decompose the functional requirements of client software into functional modules requirements. LC re-organize and dispatches modules, and through FC to provide plug-ins for client software. Furthermore, in order to ensure the timeliness, accuracy of function calls, we use RCF and AM to manage the resources. Meanwhile, the timer periodically detects the function module which unable to be used temporarily. When the function permits to release it, the FC immediately loads into the plug-in functionality for client software to use. The process of the RLM is shown in Figure 2:
The concrete implementation steps are as follows:
a) Client software confirms the service requests to generate FSRL, and submit to the RLM;
b) RLM confirms the FSRL submitted by client software. Then FR decomposes the required service into small granularity of function module, and generates the LC;
c) LC views the RCF according to FMRL, confirming whether the required function modules can be called immediately. If possible, LC will call the corresponding function modules, and update the status identification of function modules in the RCF;
d) FC unified packages function service modules as function of plug-ins. These plug-ins responses to demands of client software. Meanwhile, FC generates function module identification, and returns to the client software to use.
e) Client software calls function plug-ins, and returns plug-ins access to the RLM after completing corresponding operation requirement. Then RLM updates RCF.
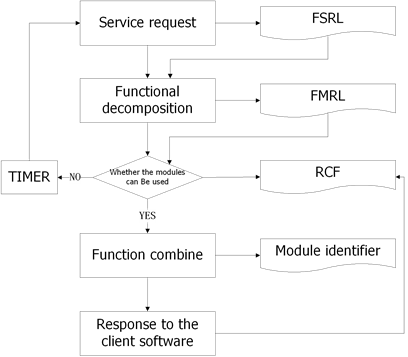
Figure 2. A workflow of the RLM.
According to the above scheme, step b) should also include the following steps: After RLM received FSRL submitted by client software; RLM decomposes the required service into small granularity of function module by FR. Meanwhile, RLM divides call requests of each functional module into read-only requests and marks them in generated function modules.
As the same, step c) should also include the following steps: After LC received FMRL, AM is read at first, in corroding to confirm whether the client software has the right to use the required level of the selected function modules. Then the results are identified in FMRL. For insufficient permissions to demand the use of functional modules, RLM will suspend the next steps. Finally, RLM checks RCF, confirms whether the required function modules can be used immediately. If the module cannot be called immediately, then the request will return temporarily, and the status will be identified in RCF [5] .
Step d) should also include the following steps: The plug-ins provided to client software adopts the loose packaging mode. For exclusive use resources such as write operation, when the user completes the functional corresponding function modules of the write operation in the plug-in use demand, the instant loading manager will return access to RLM, and updates RCF; Due to the function modules are occupied by the other programs without encapsulation plug-in function modules of the summary, the function will be used by the client software to set a time interval repeat step c), until the function modules dynamic load at the function in the plug-in.
Step e) should also include the following steps: Client software will receive FMRL after functional plug-ins package, suggests that the reason why some functions modules cannot call.
4. A Protype LBS Service Platform Design
4.1. Introduction
The common techniques for distance and angular observations which form the basis for the positioning methods are ToA/ToF, Angle of Arrival (AoA). The Time of Signal (Acoustic or RF) Arrival (TOA) is based on measuring the absolute travel time of a signal from a transmitter to a receiver, the Euclidean distance between two devices can be derived by the multiplication of the signal travel time by the wave speed. Angle of Arrival (AOA) is measured by getting the signal direction send by the adjacent node through the combination of array antenna and multiple receivers, while Received Signal Strength Indicator (RSSI) measures received power by receiving node, calculates propagation loss and transform propagation loss to distance by theoretical or empirical signal path loss model [1] [7] . In real application, AoA is usually based on crude sector information.
In range-based schemes, Signal attenuation can be exploited for distance estimation based on RSSI values because the techniques are less expensive and simple to implement in hardware, and there is no need for additional hardware.
RSSI are observed RSS (Received Signal Strength) values averaged over a certain sampling period and usually specified as received power PR in decibels. Based on the attenuation model
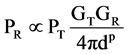
The received signal power or signal strength PR can be used to estimate the distance d of a person or a mobile object of the last affiliation line. Then paste down the copy of affiliation 1. Repeat as necessary for each additional affiliation.
In the model, PT is the transmitted power at the emitter, GT and GR are the antenna gains of transmitter and receiver and p is the path loss exponent. The path loss factor p characterizes the rate of attenuation with the increase of distance d.
RSS is defined as the voltage measured by a receiver’s received signal strength indicator (RSSI) circuit. In fact, most of RF transceiver chips have a built-in RSS indicator, which provides RSS measurement without any additional cost. The strength of RSSI at a given transmission distance can be described as
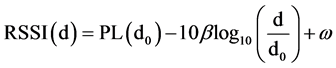 (1)
(1)
where d is the transmission distance, d0 is the reference distance, β is the rate at which the signal decays, ω is a zero-mean normally distributed random variable, PL(d0) is the received signal strength, RSSI(d) is the received signal strength from the sender. The RSSI can be estimated when the unknown nodes receive the RF signal from the anchor nodes, and the distance can be calculated via (1). Unfortunately, some studies showed large variability in RSS, because RSS is easily influenced by indoor environments [6] .
Based on the advantages and disadvantages of the two types of localization methods, this paper proposed a highly precise RSSI-based indoor localization method using a transmission power adjustment strategy to acquire RSSI after reducing the effects of indoor environments. A variety of RSS patterns in the real indoor environment are also developed to increase the accuracy of the estimated distance between two nodes [6] [7] .
4.2. System Structure
The whole system mainly consists of three parts, namely, card reader, tag, host and server, as shown in Figure 3. The Server based on Ubuntu Server 10.04 system and PostgreSQL/PostGIS as database to store the map of room and location coordinates. The calculation station is set up based on Ubuntu Desktop 12.04 with the compiler gcc and gdb. The geography programming is based on GDAL with GRASS (Geographic Resources Analysis Support System), which is a free Geographic Information System (GIS) software used for geospatial data management and analysis, image processing, graphics/maps production, spatial modeling, and visualization. GRASS GIS is currently used in academic and commercial settings around the world, as well as by many governmental agencies and environmental consulting companies [8] .
When the system is working, each reader get to collect the RSSI values of the reference tags and pending tags, and then through the positioning algorithm to calculate the undetermined tag position and display on the terminal in real-time [9] [10] .
The whole positioning process can be divided into two stages. The first stage is offline phase. Several reference tags are set up in room area, the position of reference tags can use equal grid to determine. On the other way, the distance among the reference tags should be carefully selected; too much interval will reduce the accuracy and too small will increase the load of database. 1 or 2 meters interval would be suitable.
Phase two is the stage to accomplish the target localization. In this stage, the position tags contrast with samples in system, then choose the reference tags which has highest degree of association with the target tags to calculate the accurate distance.
5. Conclusions
LBS public service will change the ordinary way of life, but also bring enormous business opportunities. At present, the high cost of service influences the LBS public service. The development and application of micro kernel technology or RLM based product will provide LBS service with a high efficiency and low cost.
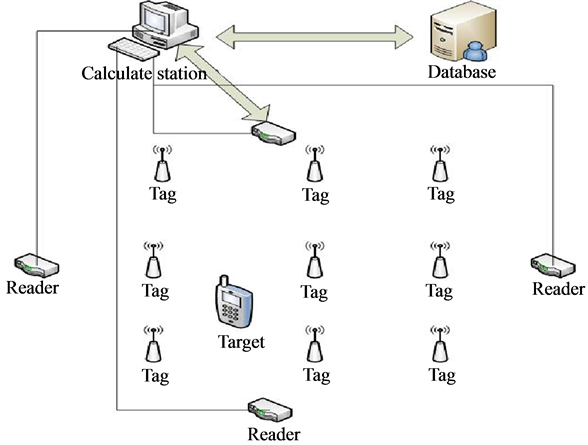
Figure 3. Indoor localization system.
Based on the analysis of advantages and disadvantages of various frequency bands and positioning algorithms, according to the indoor positioning existing NLOS phenomenon and the multipath propagation characteristics of electromagnetic wave, combined with signal strength (RSS) and the experience of the corresponding relation between geometric space distance, using the existing hardware device by calculating the most adjacent reference label location to accomplish target localization. In practice, the system greatly reduces the development cost, enhances position accuracy and service reliability and improves portability, which can be well applied to various actual situations.
Acknowledgements
At the point of finishing this paper, I’d like to express my sincere thanks to all those who have lent me hands in the course of my writing this paper. First of all, I’d like to take this opportunity to show my sincere gratitude to my supervisor, Pro Wu, who has given me so much useful advices on my writing. Secondly, I’d like to express my gratitude to my classmates who offered me references and information on time. Last but not the least, I’d like to thank those leaders, teachers and working staff especially those in the China University of Geosciences.
Funding
This paper was funded by the National Science & Technology Pillar Program during the 12th Five-year Plan Period of China (2011BAH06B04; 2012BAB11B0501).
References
- Sun, B., Wu, H., Zhao, H. and Hu, X. (2010) Research and Application on Plug-In Technology in OpenSim. Audio Language and Image Processing (ICALIP), International Conference, 23-25 November 2010, 1392-1396.
- Wang, M., Nie, Y.M. and Yuan, H. (2011) Research on the Urban Land Use Status and Potential Evaluation Information System Solution Based on OSGI Plug-In—A Case Study of Zhaoyuan, Shandong Province. Advanced Materials Research, 356-360, 2812-2815. http://dx.doi.org/10.4028/www.scientific.net/AMR.356-360.2812
- Levina, O. and Stantchev, V. (2009) A Model and an Implementation Approach for Event-Driven Service Orientation. International Journal on Advances in Software, 2, 288-299.
- Wang, J., Jie, M.Y. and Wu, B. (2011) A Schema of Dynamic Capability Updating in BI-PAAS System. Computer Science and Network Technology (ICCSNT), International Conference, 24-26 December 2011, 2556-2560.
- Laplante, P., Gold, A. and Costello, T. (2007) Open Source Software: Is It Worth Converting? IT Professional, 9, 28-33. http://dx.doi.org/10.1109/MITP.2007.72
- Sadoun, B. and Al-Bayari, O. (2007) LBS and GIS Technology Combination and Applications. IEEE, 578-583.
- Yim, J., Ko, I. and Ko, I. (2008) Implementation of a Prototype Positioning System for LBS on U-Campus. Journal of Universal Computer Science, 14, 2381-2399.
- Liu, J.B., Chen, R.Z., Pei, L., Guinness, R. and Kuusniemi, H. (2012) A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors, 12, 17208-17233. http://dx.doi.org/10.3390/s121217208
- Chen, F.X., Yang, C.J., Yu, W.Y., Le, X.Q. and Yang, J.Y. (2005) Research on Mobile GIS Based on LBS. IEEE, 901-904.
- Wang, C.M., Wang, Z.M. and Zhu, L.Z. (2007) Problems and Methods in the Location-Based Services. Geomatics & Spacial Information Technology, 32, 124-127.