World Journal of Mechanics
Vol.3 No.3(2013), Article ID:32621,4 pages DOI:10.4236/wjm.2013.33016
New Evidence on Rotational Dynamics
Curiosity & Intuition for Understanding and Knowledge, Valladolid, Spain
Email: fenotipo01@gmail.com
Copyright © 2013 Luis Alberto Pérez. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received March 21, 2013; revised April 20, 2013; accepted May 1, 2013
Keywords: Rotational Dynamics; Field Theory; Superposition of Simultaneous Motions; Macroscopic Bodies Mechanics; Inertial Fields; Torque; Angular Momentum
ABSTRACT
In this paper, the author confirmed a new theory to explain the mechanical behavior of macroscopic bodies. The confirmed hypothesis is the Theory of Dynamics Interaction by the Professor Gabriel Barceló. Barceló explained his theory in an article called “Analysis of Dynamics Fields in Noninertial Systems”, World Journal of Mechanics, Vol. 2, No. 3, 2012, pp. 175-180. This hypothesis holds that the mechanical behavior of macroscopic bodies in a non-inertial environment opens new assumptions on inertial fields and rotational dynamics. An associated experiment was presented to support the discussion in the paper. The author first became aware of the proposals of Professor Gabriel Barceló’s Theory of Dynamics Interaction through his 2006 article on Saturn planet rings, which suggested unsolved phenomena in rotational dynamics and the inception of a novel theory [1]. Intuitively, the author realized himself about the fact that the cosmos is mechanical from its smallest to its widest comprehensible appreciation. If material behavior is mechanical everywhere and every time, from a subatomic particle, wave or string, to a cluster of galaxies, then our understandable solutions must comply with the Laws of Motion, it could be believed.
1. Introduction
Phenomena like “precession” and the “gyroscopic effect” [2] have long been considered atypical, drawing wide curiosity and interest in applications for construction of artifacts and games. Their behavior is still considered a strange topic by mechanics science.
Gabriel Barceló’s article Analysis of Dynamics Fields in Noninertial Systems, Vol. 2, No. 3, June 2012, in the World Journal of Mechanics [3] and the attached video with experimental proofs, aims at explaining and supporting the hypothesis proposed in the Theory of Dynamics Interaction (TDI) [4].
The mobile utilized in those experiments, however, did not seem to be entirely inertial to me, because the rectilinear drive forward of the submarine utilized was carried out by an engine and propellers, but also involved a rotational movement due to water friction.
The investigation carried out by G. Barceló was so interesting to me that I designed new experiments, with the purpose of achieving a clearer cut inertial mobile. The present video and article aims at providing clearer empirical support to the theory.
What this Theory states is that starting from a rigid body or a system of material particles that has a linear movement and also an intrinsic angular momentum [5], this is, a nonzero angular velocity, when the system experiences any angular momentum, a torque not collinear with the principal intrinsic angular momentum that is, then something specific occurs: the center of mass of the system shows a variation in direction of the initial straight line, a deviation from its initial straight path.
The velocity fields generated by the so called resulting torque or dynamic interactions torque are a dynamic consequence of the joint action between the main angular momentum and the secondarily applied non-collinear torque.
The momenta, inertial inhomogeneous fields (velocity fields or momenta of rotation particles) generated as a result of a secondary torque, what is called angular precession, are added to the closed system rectilinear momentum vector, consequently, they dynamically engage to the entire inertial motion of the system.
In short, the phenomenon is due to the fact that these fields are dynamically coupled with velocity fields that apply to the rectilinear displacement of the system’s center of mass.
This form of path deviation is predicted and described by the TDI [6] by a simple equation, by which the resulting velocity is related to the initial one via a rotational operator:
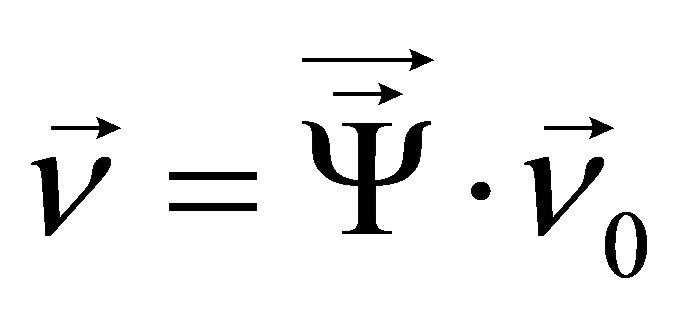
This is a general equation of motion for bodies with angular momentum that are subjected to successive noncoaxial torques. For this equation, the rotational operator serves as a matrix that transforms the initial velocity, by means of rotation, into the velocity that corresponds to each successive dynamic state [3].
The radius of curvature which exists at any given point of the system mass center trajectory is extracted through the mentioned equation.
The evidenced path, answers to algebraic additions (couplings) of inertial fields.
Watch the video by clicking on the figure above (Figure 1) or in this direction:
https://www.dropbox.com/s/0nkgmy45ipru45z/TID20130218eng.mp4
2. Experimental Details
I designed a specific instrument as a prototype to perform these tests with the purpose of visualizing, on ground, the application of the TDI proposed by the Professor Gabriel Barceló.
The physical tool is a system of rigid solid particles mechanically able to give a non accelerated inertial angular momentum to a solid uniform homogeneous mass revolving around its axis; it is also able to cause the mechanical action of a torque in the direction not collinear with said initial main angular speed.
To perform the test the instrument operates standing on wheels on a flat smooth surface. For the first prototype these wheels are not gyratory (Figure 2), and for the second one the wheels are all gyratory (Figure 3).
First of all, in order to make a correct test, the system must be provided by 2 mechanical simultaneous facts: an angular momentum, and a rectilinear momentum.
The angular momentum is performed by a simple angular impulse which is given by the activation of a cen-
Figure 1. Theory of dynamic interactions: video illustrating experimental tests (the corresponding URL to the video).
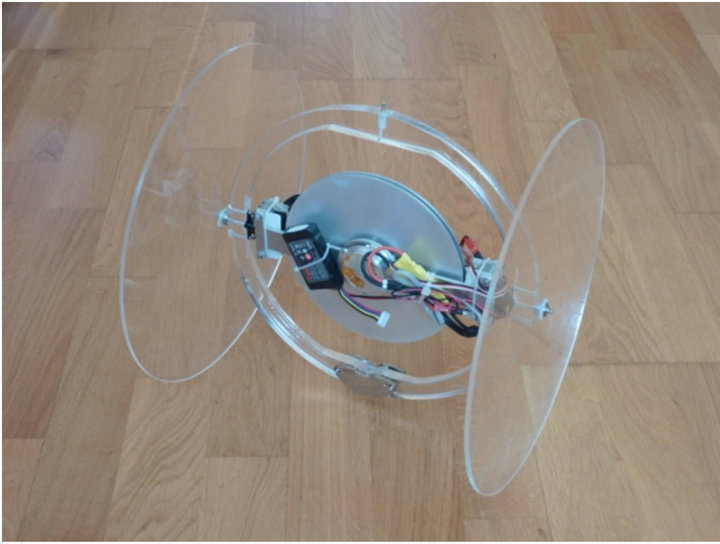
Figure 2. Prototype I.
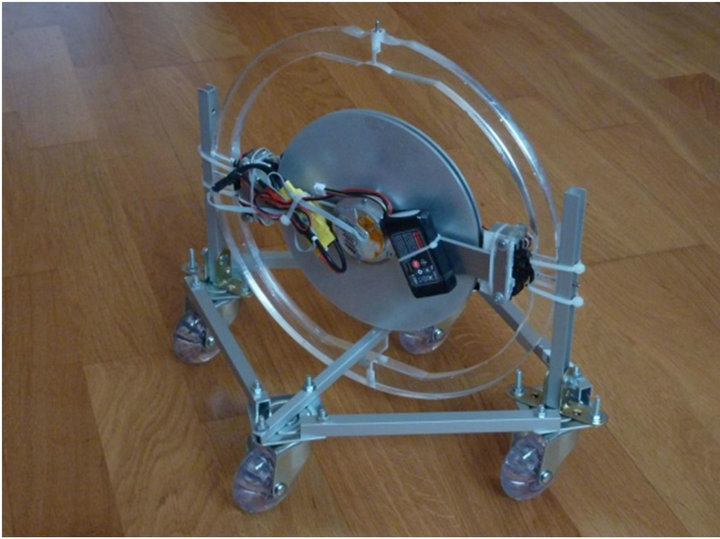
Figure 3. Prototype II.
tral motor which makes the disc to acquire an angular speed. Once the angular impulse is finished, i.e. the motor is deactivated, the disc has an intrinsic angular momentum which is inertial.
While this is still happening, a rectilinear momentum is performed by a simple push parallel to the ground plane, or putting the system onto a slightly inclined surface, giving a rectilinear movement to the system in the direction the wheels rotate normally.
It must be remarked that the angular and rectilinear speeds are both inertial, although they are negatively accelerated due to multiple frictions.
Once the system is equipped with both inertial moments, a secondary torque in right angle to the main angular momentum is driven by two servo-motors simultaneously acting for it.
This torque is applied internally from within the system, and still, as predicted the TDI, the deviation of the trajectory of the mass center in the instrument, is visually manifested as it is shown in the experiment.
In order to perform the tests, the instrument operates standing on different types of wheels on a flat smooth surface. An initial impulse is given for it to acquire a rectilinear inertial momentum.
After repeated tests using different ways of supports for the system to be smoothly pushed horizontally on ground, I was able to confirm the dynamic hypothesis the TDI exposes.
The generated velocity fields are dynamically coupled to the rectilinear inertial field, giving as a result the predicted deviation of its original trajectory.
Another test has been performed with the system supported on four gyratory wheels (Figure 3).
The system has been provided with an inertial non accelerated angular momentum as well as a rectilinear momentum, also inertial.
It is important to highlight that the secondary torque is activated perpendicular to the principal angular momentum when the main engine is inactive.
The system initially must have an intrinsic angular momentum which we will call main angular momentum. When this is happening and a torque is operated on the solid, this torque is normal to the said main angular momentum.
3. Result and Discussion
Despite the difficulties in performing the experiment on ground, with the unavoidable negative accelerations due to friction with land surface, air, and also the existing one in the bearings and motors, it has been possible to perform the test.
If there were no such frictions, the measures that could be taken, with regard to both speeds as the instant radii of curvature, hypothetically would verify the theoretical framework that Professor Barceló exposes in his Theory of Dynamic Interactions through various publications and articles.
The inertial field is coupled, vectorially added, to any velocity field available to the system’s centre of mass.
The diagram of motions and actions to be performed to the system in order to get the behavior predicted by the Theory is displayed by this picture (Figure 4).
4. Conclusions
The substantial difference between these experiments, resting on gyratory wheels, with the submarine test developed by Gabriel Barceló Rico-Avello is that, in this case, the rectilinear momentum and the main angular momentum are both inertial (although negatively accelerated due to multiple frictions).
Being both moments, rotation and translation, of an inertial character, the secondary torque is activated and it is evidenced that the system center of mass deviates the direction of its rectilinear velocity vector.
The new dynamic hypothesis, as proposed by Professor Gabriel Barceló, is empirically demonstrated when velocities’ fields generated by the torque of dynamic interaction are dynamically coupled with any inertial field of a possible system rectilinear inertial momentum.
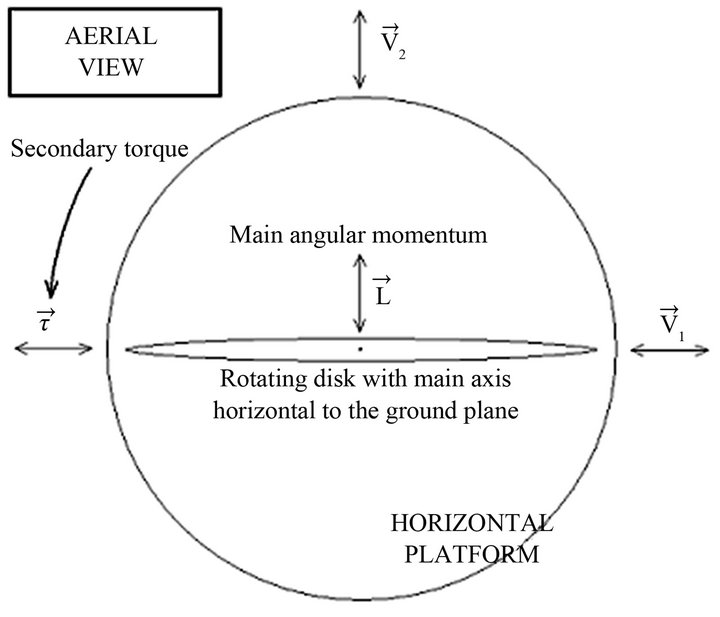
Figure 4. Schematic aerial view about the possible places, directions and ways of these 3 different elements: rectilinear momentum, main angular momentum, and secondary torque applied to the body.
From the study of this and other phenomena derived from observations of bodies endowed with angular momentum simultaneously suffering the action of some torque not collinear with them, we conclude the need to persevere further in these studies. The fact about having ignored these assumptions, which are an important area of non-inertial dynamics, may have been due to the lack of a suitable mathematical tool. We therefore encourage finding a new mathematical system, a new algebra, that does not exist yet nowadays, to understand the rotational dynamics, and also the need for a new drive in the further research and study of velocity fields or inertial fields in baryonic matter.
This article, and the video attached, confirms the above proposal explained by Professor Barceló in his article, Analysis of Dynamics Fields in Noninertial Systems, published on Vol. 2, No. 3, June 2012, in the World Journal of Mechanics, even in real inertial conditions. Consequently, I understand that the above theory is a new paradigm of dynamics behavior.
I believe that these conclusions modify the foundations of rational dynamics and incorporate new criteria of great impact and significance.
REFERENCES
- G. Barceló, “A New Rotational Dynamics of Interactions for the Planet Saturn,” 2006. http://www.dinamicafundacion.com/dinamica_de_%20saturno.htm http://www.coiim.es/forocientifico/Paginas/Los%20anillos%20de%20Saturno.aspx
- H. Goldstein, “Classical Mechanics,” Addison-Wesley, Reading, 1994.
- G. Barceló, “Analysis of Dynamics Fields in Noninertial Systems,” World Journal of Mechanics, Vol. 2, No. 3, 2012, pp. 175-180. doi:10.4236/wjm.2012.23021
- G. Barceló, “El Vuelo del Bumerán,” Marcombo, Barcelona, 2005.
- L. D. Landau and E. M. Lifshitz, “Mechanics, Third Edition: Volume 1 (Course of Theoretical Physics),” Butterworth-Heinemann, Oxford, 1976.
- G. Barceló, “Un Mundo en Rotación,” Marcombo, Barcelona, 2008.