F. FAN ET AL.
Copyright © 2013 SciRes. EPE
872
20151050
2,000
1,500
1,000
500
0
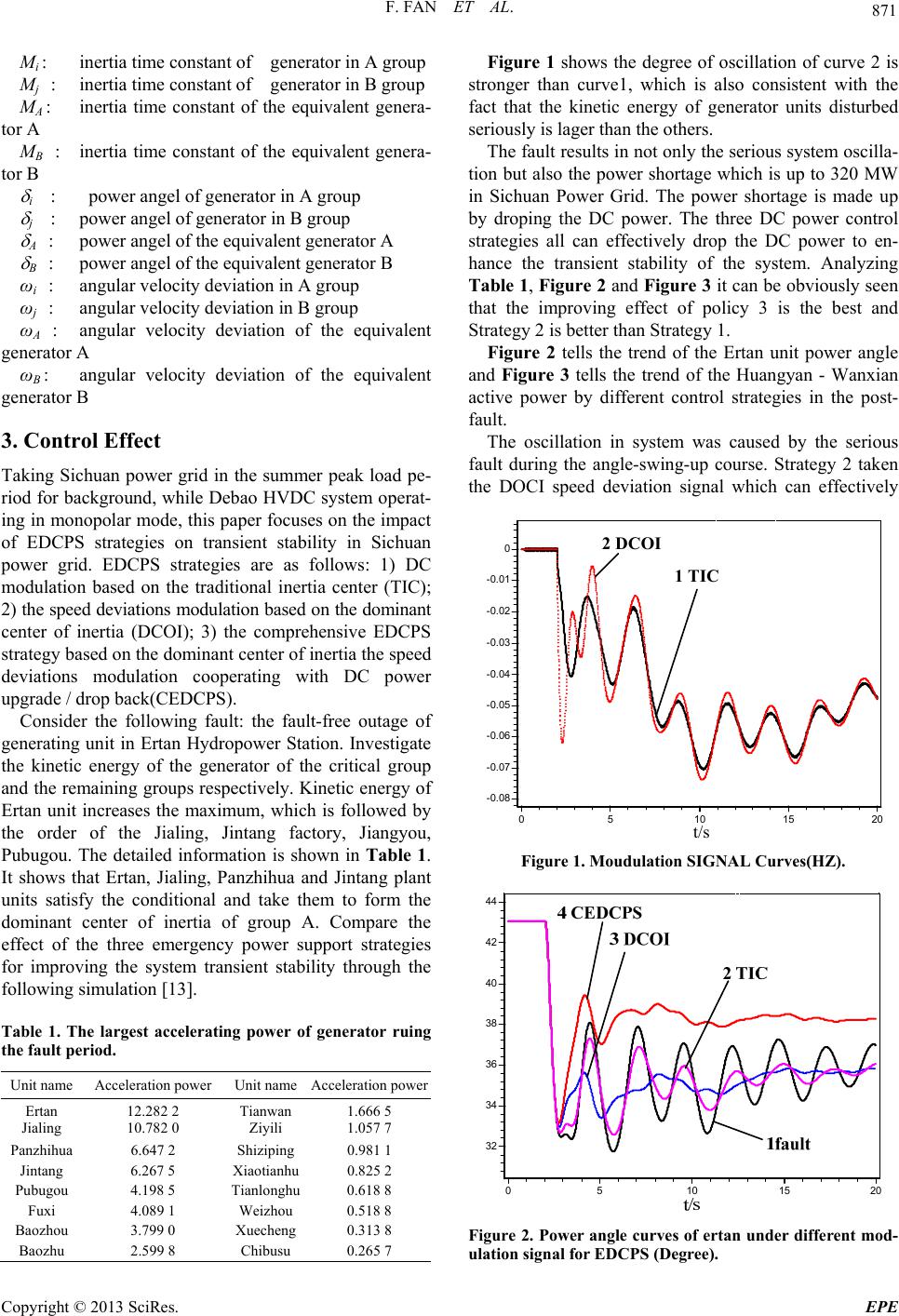
Figure 3. Active power of Huangyan-Wanxian lines (MW).
reflect the inter -area oscillatio n information provides more
damping compared to strategy 1 which is limited by lo cal
information. Strategy 3 with the same ability of providing
damping as strategy 2 makes up the power shrotage to
restore the system to a stable operating point close to the
pre-failure stable equilibrium point by droping DC
power.
4. Conclusions
This paper proposes a wide area information filtering and
integration method ba sed on participation factor which is
defined by relative kinetic energy increase during the
transient pro cess. It provides an effective wa y for screening
and selection of the feedback control signal from the
massive information. Compared with traditionas signal
modulation, the selected signal with higher accuracy can
not only reflect the global features of the system, but also
greatly reduce the amount of computation. After a com-
parative study of the system characteristics of various
EDCPS under typical faults, it indicates that the DOCI
speed deviation as a control signal can significantly en-
hance the inter-area damping. The emergency power
support comprehensive strategy based on the dominate
center of inertia speed deviation modulation cooperating
with DC power increase / back drop further develop and
utilize the potential of DC modulation to maintain system
transient stability. It provides a new way for detection
and effective correction of instability threat caused by
severe disturbance.
5. Acknowledgements
This work is supported by National Natural Science
Foundation of China (No. 51037003) and National High
Technology Research and Development Program of
China (863 Program). At the same time, the authors
ould like to appreciate all research members of the re-
search team for valuable discussion and investigation.
REFERENCES
[1] X.-Y. Li, “High Voltage Direct Current Transmission
System Operation and Control” Beijing: Science Press,
1998.
[2] E. Bristol, “On a New Measure of Interaction for Multi-
variable Process Control,” IEEE Transaction on Automa-
tion Control,Vol. 11, No. 1, 1966, pp. 133-134.
doi:10.1109/TAC.1966.1098266
[3] P. X. Zhang, Y. J. Cao, H. F. Wang, et al., “Application
of Relative Gain Array Method to Analyze Interaction of
Multi-Functional FACTS Controllers,” Proceedings of
the CSEE, 2004, Vol. 24, No. 7, pp. 13-17.
[4] J. Y. Zhang and Y. Z. Sun, “A Vulnerable Cut Sets Based
Sensitivity Analysis Method for Locating Emergency
Control,” Power System Technology, Vol. 31, No. 11,
2007, pp. 1-7.
[5] X. M. Mao, Y. Zhang and L. Guan, “A Novel WAMS
Based HVDC Modulation Method,” Automation of Elec-
tric Power Systems, Vol. 31, No. 7, 2007, pp. 45-49.
[6] J. B. He, L. C. Li, H. X. Chen, et al., “Selection of Feed-
back Signal for Power System Damping Controller Based
on Wide Area Measurements,” Automation of Electric
Systems, Vol. 31, No. 9, 2007, pp. 6-10.
[7] W. D. Yang, Y. S. Xue, Y. Jing, et al., “Emergency DC
Power Support to AC Power System in the South China
Power Grid,” Automation of Electric Power Systems,
Vol. 27, No. 7, 2003, pp. 68-72.
[8] Y. Zhang, L. Wehenkel, P. Rousseaux, et al., “SIME:
Ahybrid Approach to Fast Transient Stability Assessme nt
and Contingency Selection,” Electrical Power Energy
Syst, 1997, Vol. 19, No. 3, pp. 195-208.
doi:10.1016/S0142-0615(96)00047-6
[9] Y. S. Xue, “A Critical Comparison of Various Methods
for Transient Stability Assessment-Part Two Barrier Point
and the Observation Point,” Automation of Electric
Power Systems, Vol. 25, No. 11, 2001, pp. 1-7.
[10] M. C. Liao, G. L. Cai and Y. J. Zhang, “Transient Volt-
age Stability of Received Power Grid in AC/DC Hybrid
Power Systems,” Power System Protection and Control,
Vol. 37, No. 10, 2009, pp. 1-4.
[11] H. J. Wu, Y. H. Wang, X. Y. Li, et al., “Study on DC
modulation for AC/DC hybrid transmission system based
on comprehensive performance index,” Power System
Protection and Control, Vol. 38, No. 22, 2010, pp. 68-73.
[12] M. M. Xu, X. Y. Li, Y. H. Wang, et al., “Impact on the
Damping Characteristics of Sichuan Power Grid by De-
bao DC Modulation,” Power System Protection and Con-
trol, Vol. 38, No. 23, 2010, pp. 141-146.
[13] T. S. Xu, B. J. Li, Y. H. Bao, et al., “Optimal Parame-
ter-Setting of Under Frequency and Under Voltage Load
Shedding for Transient Security,” Automation of Electric
Power System, Vol. 27, No. 22, 2003, pp.12-15.
w