Paper Menu >>
Journal Menu >>
 Journal of Signal and Information Processing, 20 11 , 2, 44 - 51 doi:10.4236/jsip.2011.21007 Published Online February 2011 (http://www.SciRP.org/journal/jsip) Copyright © 2011 SciRes. JSIP TV Sparsifying MR Image Reconstruction in Compressive Sensing Yonggui Zhu, Xiaolan Yang School of Science, Communication University of China, Beijing, China Email: ygzhu@cuc.edu.cn Received January 23rd, 2011; revised February 18th, 2011; accepted February 19th, 2011 ABSTRACT In this paper, we apply alternating minimization method to sparse image reconstruction in compressed sensing. This approach can exactly reconstruct the MR image from under-sampled k-space data, i.e., the partial Fourier data. The convergence analysis of the fast method is also given. Some MR images are employed to test in the numerical experi- ments, and the results demonstrate that our method is very efficient in MRI reconstruction. Keywords: Compressed Sensing, Magnetic Resonance Image, Total Variation, Image Reconstru ct ion 1. Introduction Compressed Sensing has enormous potentials for scan time reducing significantly in magnetic resonance im- age(MRI) research community. Compressed Sensing theory was put forward by Candes, Romberg and Tao [1], and D. Donoho [2] in 2006. They pointed out that sparse signals can be reconstructed from a very limited number of samples, provided that the measurements satisfy an incoherence property [3]. For MRI Com- pressed Sensing, it is possible to reconstruct accurately MR images from under-sampled k-space data, i.e., the partial Fourier data by solving optimization prob- lems. Suppose N uR is a sparse signal, and 0 u denotes number of n on-zer os in u. Let A be M N (K < M N) measurement matrix such that A ub, where b is an observed data vector. Then to recover u from b is equivalent to solve 0 Lproblem: 0 min , uuAub (1) However, problem (1) is provably NP hard [4] and very difficult to solve from the viewpoint of numerical computation. Thus, i t is rexali stic t o solve 1 L problem: 1 min , uuAub (2) which has also been known to yield sparse solutions un- der some conditions (see [5,6] for explains). In the case of Compressed Sensing MRI, A is a partial Fourier ma- trix, i.e., , M N APFPR is consisted of M N rows of the identity matrix, F is a discrete Fourier matrix. When b is contaminated with noise such as Gaussian noise of variance 2 , the relaxation form for problem (2) should be gi ven by 22 12 min : uuAub (3) The total variation regularization has been first pro- posed for image denoising by Rudin, Osher and Fatemi [7]. It is well known that TV regularizier can better re- cover piecewise smooth signals with preserving sharp edges or boundaries. So TV regularizer is a sparsifying transform operator for piecewise smooth MR images such as brain images. When only TV sparsifying trans- form is considered, the optimization problem in Com- pressed Sensing MRI can be written as 22 2 min , TV uuPFu b (4) The unconstrained version o f pro blem (4) is 2 2 min 2 TV uuPFub , (5) where μ is a positive parameter that determines the trade-off between the fidelity term and the sparsity term, 2 .denotes the Euclidean norm. Model (5) was previ- ously mentioned by He etal.[8] and Lustig et al. [9]. In this paper, we focus on the two dimensional MRI Compressed Sensing model (5). All two dimensional images are changed into one dimensional vectors in the context of paper. For square images, let 2 n uR be a  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 45 nn image. TV u in (5) is defined as 1 22 2 1, 2, ,jk jk jk TV uuu . In the two dimen- sional image practical applications, we only consider the periodic boundary condition of the image. Therefore, the discrete gradient operators 1 and 2 of nn im- age can be defined by 1, , 1, 1, , jk jk jk knk uuifjn uuu ifjn (6) ,1 , 2, ,1 , jk jk jk jjn uuifkn uuu ifkn (7) 22 12 ,nn DDR denote finite difference matrices corresponding to 1, j k u and 2, j k u respectively. Let 12 2 ,T iii DuD uDuR where ,1,2 l i Du l are the ijnk th entry of l Du, i is correspond- ing to the (j,k)th pixel position of the image. The summa- tion 2 12 n i iDu equals to the discrete total variation of u, i.e. TV uThus (5) is changed into 22 22 1 min 2 n i ui DuPFu b (8) Recently, Y. L. Wang et al. [10] have studied the total variation image restoration model: 2 2 min 2 TV uuBuf (9) i.e. 22 22 1 min 2 n i ui DuBuf , (10) where 22 nn BR represents a blurring operator. They proposed an alternating minimization method to solve (9). In this paper, we will apply this approach to the Com- pressed Sensing MRI model (8). In model (8), 2 mn PR is a selection matrix con- sisting of 2 mn rows of the identity matrix, F is a two-dimensional discrete Fourier transform matrix. So PF serves as a sensing matrix. b is acquired (by coils in an MRI scanner) and sent to a computer, so b is an ob- served data containing noise. We will employ quadratic penalty approach [11] to split the model (8) into two sub-minimization problems, and build the fast method to solve the two sub-problems. We will also analyze the convergence of the fast reconstruction method. This pa- per is organized as follows. In section 2, basic algorithm and optimization is given. Section 3 presents the conver- gence analysis of the fast reconstruction algorithm. In section 4, Shepp-Logan Phantom image and some real MR images are employed to do numerical experi- ments to demonstrate the effectiveness of the fast recon- struction method. 2. Basic Algorithm and Optimization Firstly, we introduce some notations for the sake of con- venience. For vectors 2 n iR and finite difference ma- trices 22 ,1,2, inn DR i assume 1212 ;, T TT w and 12 12 ;, T TT DDD DD Let 2 22 12 ();(), 1,2,, iii n wRin vR By using quadratic penalty approach, we can change (8) into the following prob lem: 22 22 222 ,, 11 min 22 nn iii uw ii wwDuPFub (11) In (11), i w is the approximation of i Du. It is well known that the solution of (11) converges to that of (8) as . Therefore the solution of (11) for large enough can better approximate to that of (8). If fix alter- natively u and w, we can obtain the following two sub-problems: 22 2 2 11 2 min 2 nn iii wii wwDu , (12) 222 2 12 min 22 n ii ui wDu PFub . (13) Since w-subproblem (12) is separable with respect to i w, minimizing (12) is equivalent to solving 22 22 min,1,2, , 2 iiii wwin wDu (14) Therefore, we can get its minimizer by two dimen- sional shrinkage: 2 ,1,2,, iwi wsDuin, (15) where 1 max,0 i wii i Du sDuDu Du in which 0 00 0 is assumed. For vectors 2 ,n x yR, define 22 22 ,:nn w SxyR R by 2 12 ,,,, T wwww n Sxy szszsz, (16) where 2 ,,1,2,, T iii zxyi n  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 46 Rewrite (15) as the following: 12 , w wsDuDu. (17) For u-subproblem (13), the first-order optimality con- dition is 22 11 0 nn T TT ii ii ii DDuDwPFPFu b (18) We note that 2 (1)(1) (2)(2) 1 TT nTT ii i DDuDDDDuDDu 2 1 nTT ii i Dw Dw Thus TTT TTT DDFPPFuDw FPb . (19) For l = 1, 2, suppose the Fourier transform of l D are l D . Let 12 12 ;, T TT DDD DD Apply the Fourier transform to both sides of (19), we can obtain TT TT DDFuPPFuDFw Pb . (20) For the periodic boundary condition for u, (1)(1) , T DD (2) (2) T DD are all block circulant [12]. Therefore, T DD can be diagonalized by Fourier transform. It is easy to see that T PP is diagonal. Thus TT DD PP is also a diagonal matrix. Given w, we can obtain u by the two steps. The first step is to get F u by solving (20). The second step is to obtain u by applying the inverse fou- rier transform to F u. For the sake of simplicity, let 222 2 2 1 min 22 n uii ui s wwDuPFub . (21) For a fixed , the alternating approximation algo- rithm for solving (8) can be given as follows: Algorithm 1 Input b, Pand parameters > 0, μ > 0. Initialize 0 uu While stopping criterion is not satisfied, Do Compute 1121 ,, ,1,2,. kkk w kk u wsDuDu uswk End Do To solve the u-subproblem use only a FFT transform and a inverse FFT transform, and the solution of w- subproblem can be obtained by two dimensional shrink- age, so this alternating algorithm is a fast approach. The stopping criterion will be given in the section numerical experiments. The convergence analysis of this algorithm will be discussed in detail in th e next section. 3. The Convergence Analysis and a Continuation Strategy In this section, we give the convergence analysis of the alternating algorithm for fixed > 0. We give the defi- nition of the firmly non-expansive operator before the presentation of non-expansiveness for two dimensional shrinkage. Definition 3.1. An operator 22 : s RR is firmly non- expansive if it satisfies the following condition: 22 2 2 22 s x syxyIdsxIdsy where Id is identity operator. It is easy to show that a firmly non-expansive operator22 : s RR is non-ex- pansive, i.e., for any 2 2 2 ,, x yRsx syxy Lemma 3.1. If 22 :PR R is the projection onto 21 xRx , and for 2 x R the two dimen- sional shrinkage operator 22 : w s RR is defined as 22 1 max ,0 w x sx x where0 00 0 is fol- lowed, then w s xxPx . Lemma 3.2. For all 2 , x yR, it holds that 22 2 2 22 ww s xsyxy PxPy Further- more, if 2 2 ww s xsyxy ,.then , 2 2 22 ,:nn w S xy RR x y The proofs of these two lemmas are shown in [10]. By Lemma 3.1 and Lemma 3.2, we can get the fol- lowing theorem: Theorem 3.1. For 2 x R, if the two dimensional shrinka g e operator 22 : w s RR is given by 22 1 max ,0 w x sx x then w sis non-expansive, i.e., for a n y 2 , x yR, 2 2 ww s xsyxy. (22) Theorem 3.2. For vectors 2 ,n x yR, if 22 22 ,:nn w SxyR R is defined by 2 12 ,,,, T wwww n Sxy szszsz where 2 ,,1,2,, T iii z xy inand 12 ;DDD 12 , TT T DD , then  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 47 12 12 2 2 ,, ww SDxDxSDyDyDxy(23) Proof. By theorem 3.1 and the definition of w S, for any 2 ,n x yR, we obtain 2 2 2 12 12 2 12 1 2 12 2 2 12 12 12 2 2 ,, , , ,, ww nT wii i T wii nTT ii ii i SDxDxSDyDy sDxDx sDyDy Dx DxDy Dy Dx Dy since 12 12 ;, TT T DDD DD This completes the proof. Let TTT M DD FPPF , since 0, 0 , M is nonsingular. According to (19), we have 1 1121 1 1121 11 , , kk u k TTT kk TTT w kk TTT w uSw MDw FPb M DSD uDuFPb M DSD uDuMFPb Assume 11121 1 1 , kkk Tw TT uMDSDuDu MFPb , (24) Then 1kk uu (25) Next we show that the operator T is non-expansive. Theorem 3.3. For μ large enough in (8), the operator T in (24) is non-expansive, i.e., for 2 ,n x yR, it holds that 2 2 TxTyx y Proof. 2 12 12 1 2 12 12 1 2 ,, ,, Tww Tww Tx Ty MDS DxDxS DyDy MDS DxDxS DyDy . Using (23) in Theorem 3.2, we have 12 12 1 2 1 2 ,, Tww T MDS DxDxS DyDy MDDxy Hence 1 22 1 2 1 2 T T T TxTyM DDxy MDDxy DDMx y where is matrix-norm. Since TTT M DD FPPF , if μ is large enough such that 11 T DDM ,then 2 Tx Ty 2 x y This completes the non-expansiveness of the operator T (·). Theorem 3.4. For any initial value 2 0n u, as- sume k u be generated by (25), then T is asymptoti- cally regular, i.e., 100 1 22 lim lim0 kk kk kk uu TuTu Proof. Since 1121 , kkk w wSDuDu by (19), we have 1 12 , k TTT kk TTT w DD FPPFu DSD uDuFPb (26) 1121 , k TTT kk TTT w DD FPPFu DSD uDuFPb . (27) (26) minus (27) is 1 12 1121 ,, kk TTT kkk k Tww DDFPPF uu DSDuDuSDuDu That is 1 12 1 1121 , , kk kk Tw kk w uu MDSDuDu SDu Du Therefore 11 2 12 1121 2 ,, kk T kkk k ww uu MD SDu DuSDuDu 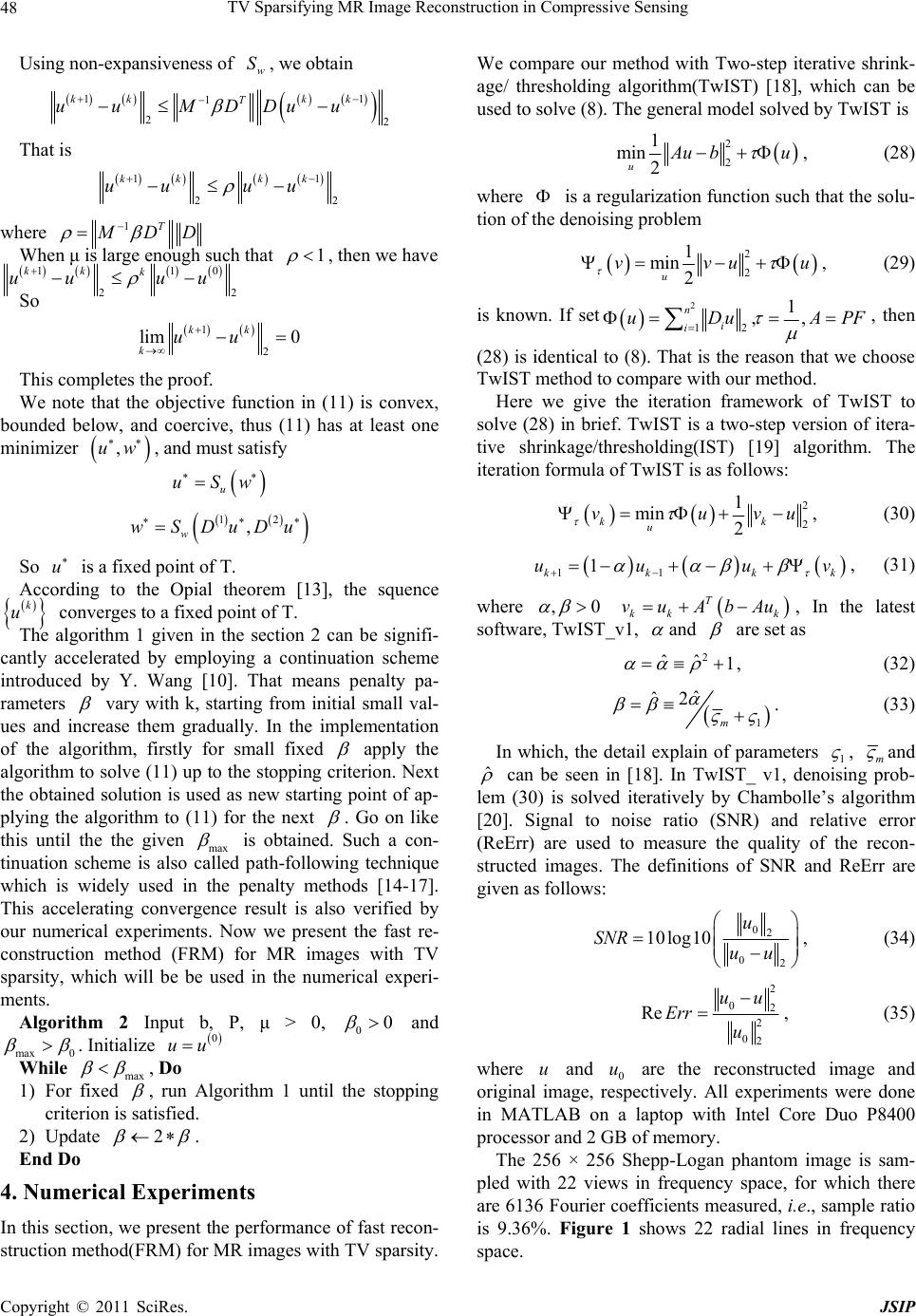 TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 48 Using non-expansiveness of w S, we obtain 11 1 22 kk kk T uu MDDuu That is 11 22 kk kk uu uu where 1T M DD When μ is large enough such that 1 , then we have 110 22 kk k uu uu So 1 2 lim 0 kk kuu This completes the proof. We note that the objective function in (11) is convex, bounded below, and coercive, thus (11) has at least one minimizer ,uw , and must satisfy u uSw 12 , w wSDuDu So u is a fixed point of T. According to the Opial theorem [13], the squence k u converges to a fixed point of T. The algorithm 1 given in the section 2 can be signifi- cantly accelerated by employing a continuation scheme introduced by Y. Wang [10]. That means penalty pa- rameters vary with k, starting from initial small val- ues and increase them gradually. In the implementation of the algorithm, firstly for small fixed apply the algorithm to solve (11) up to the stopping criterion. Next the obtained solution is used as new starting point of ap- plying the algorithm to (11) for the next . Go on like this until the the given max is obtained. Such a con- tinuation scheme is also called path-following technique which is widely used in the penalty methods [14-17]. This accelerating convergence result is also verified by our numerical experiments. Now we present the fast re- construction method (FRM) for MR images with TV sparsity, which will be be used in the numerical experi- ments. Algorithm 2 Input b, P, μ > 0, 00 and max 0 . Initialize 0 uu While max , Do 1) For fixed , run Algorithm 1 until the stopping criterion is satisfied. 2) Update 2 . End Do 4. Numerical Experiments In this section, we present the performance of fast recon- struction method(FRM) for MR images with TV sparsity. We compare our method with Two-step iterative shrink- age/ thresholding algorithm(TwIST) [18], which can be used to solve (8). The general model solved by TwIST is 2 2 1 min 2 u A ub u , (28) where is a reg ularization functio n such that the so lu- tion of the den ois i n g pr obl em 2 2 1 min 2 u vvuu , (29) is known. If set 2 12 1 ,, n i i uDu APF , then (28) is identical to (8). That is the reason that we choose TwIST method to compare with our method. Here we give the iteration framework of TwIST to solve (28) in brief. TwIST is a two-step version of itera- tive shrinkage/thresholding(IST) [19] algorithm. The iteration formula of TwIST is as follows: 2 2 1 min 2 kk u vuvu , (30) 11 1 kk kk uu uv , (31) where ,0 T kk k vuAbAu , In the latest software, TwIST_v1, and are set as 2 ˆˆ1 , (32) 1 ˆ ˆ2 m . (33) In which, the detail explain of parameters 1 , m and ˆ can be seen in [18]. In TwIST_ v1, denoising prob- lem (30) is solved iteratively by Chambolle’s algorithm [20]. Signal to noise ratio (SNR) and relative error (ReErr) are used to measure the quality of the recon- structed images. The definitions of SNR and ReErr are given as follows: 02 02 10log10 u SNR uu , (34) 2 02 2 02 Re uu Err u , (35) where u and 0 u are the reconstructed image and original image, respectively. All experiments were done in MATLAB on a laptop with Intel Core Duo P8400 processor and 2 GB of memory. The 256 × 256 Shepp-Logan phantom image is sam- pled with 22 views in frequency space, for which there are 6136 Fourier coefficients measured, i.e., sample ratio is 9.36%. Figure 1 shows 22 radial lines in frequency space.  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 49 Figure 1. Sampling domain with 22 views in frequen cy sp ace. In the following tests, we assume the mean value and standard deviation for the additive Gaussian noise are 0 and 0.01, respectively. When using FRMto do numerical experiments, we initialize 5 2 and final max equals to 10 2. Let μ = 1000, and set initial image 0 u to zero. The stopping criterion is the relative difference between the successive iterate of the reconstructed image satisfy the following: 1 4 2 2 10 kk k uu u (36) According to the above mentioned parameters and the stopping criterion, we use our algorithm to do Phantom image reconstruction experiment. Figure 2(a) is Phepp- Logan phantom original image. The reconstructed image is showed in Figure 2(b). The SNR, ReErr and CPU time(seconds) are 31.3687 dB, 0.0270 and 19.4375, re- spectively. Now we apply TwIST method to do Phantom image reconstruction experiment. We choose the monotonic variant of TwIST in TwIST_v1, which stops when the relative change in the objective function falls below Tol- erance=1e-4. Parameters and are determined by using (32) and (33). The parameter 1 is equal to 1e-3 that is recommended by the TwIST_v1 documentation. Set = 1e-3, which is corresponding to μ = 1000. If we use TwIST to do the reconstruction test for the Logan Phantom image with same sampling ratios. The result is presented in Figure 2(c). Its SNR, ReErr and CPU time(seconds) are 29.0010 dB, 0.0355 and 55.5938, respectively. From all the two reconstructed images, it is clear that our method have better qualities than TwIST. In addition, from the values of SNR, ReErr and CPU time for restructed image, our method increases 11 the SNR by 2.3677 dB and reduce the ReErr and CPU time 0.0085 and 35.1563 seconds more than TwIST. When we choose some views 44 , 66, 88, the sampling ratios for Phantom image are 18.76%, 26.85%, 34.97%. The reconstructed results are showed in Figure 3 and Figuure 4 by the two methods. The following table presents the values of SNR, ReErr and CPU time of reconstructions under different views by FRM and TwIST. From Table 1, we can see that the SNR obtain ed using FRM is higher than that obtained using TwIST under the same sampling ratios or views. Figure 5(a), (b) and (c) give SNRs, the relative errors and CPU time, respec- tively, of reconstructed images by FRM (red curves) and TwIST (green curves) from the observed data at a se- quence of different sampling ratios. Now we look three different 256 × 256 MR brain im- ages, which are shown in Figure 6 (a), (b) and (c), re- spectively. We choose 66 views sampling for the three MR im- ages, in which the sampling ratio is equal to 26.85%. (a) (b) (c) Figure 2. (a) Original image. (b) Reconstruction by FRM. (c) Reconstruction by TwIST. (a) (b) (c) Figure 3. Reconstruction by FRM (a) 44 views. (b) 66 views. (c) 88 views. (a) (b) (c) Figure 4. Reconstruction by TwIST (a) 44 views. (b) 66 views. (c) 88 views.  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 50 Table 1. SNR, ReErr, CPU of reconstructions under differ- ent views or sampling ratios by two methods. Views/Samp.ratio Method SNR ReErr CPU FRM 40.6877 0.0092 7.1875 44/18.76% TwIST 30.7696 0.0289 26.4219 FRM 44.8714 0.0057 4.9063 66/26.85% TwIST 30.8412 0.0287 20.2031 FRM 47.8810 0.0040 3.6719 88/34.97% TwIST 30.8412 0.0286 17.7969 (a) (b) (c) Figure 5. (a) SNRs. (b) Relative Errors. (c) CPU time. When use FRM and TwIST to do reconstruction ex- periments for the three MR images, all parameters in the two methods are still same as the above mentioned. The results reconstructed by FRM and TwIST are presented in Figure 7. and Figure 8., respectively. The SNRs, the relative errors and CPU time of the re- constructed images by FRM and TwIST are given in the Table 2. From the quality of reconstructed images and the val- ues of SNR, ReErr and CPU time, we can see that FRM method is better than TwIST method. (a) (b) (c) Figure 6. Original image. (a) Brain 1. (b) Brain 2. (c) Brain 3. (a) (b) (c) Figure 7. Reconstructions by FRM (a) Brain 1. (b) Brain 2. (c) Brain 3. (a) (b) (c) Figure 8. Reconstructions by TwIST (a) Brain 1. ( b) Br ain 2. (c) Brain 3. Table 2. SNR, ReErr, CPU time and sampling ratios for reconstructed results by FMR and TwIST. ImageMethodSNR ReErr CPU Samp.ratio FRM 26.12880.0494 6.9063 26.85% Brain 1 TwIST 24.73650.0580 20.8438 26.85% FRM 21.93530.0800 9.1719 26.85% Brain 2 TwIST 21.14940.0876 20.9375 26.85% FRM 27.69160.0412 6.4531 26.85% Brain 3 TwIST 26.15990.0492 20.5938 26.85%  TV Sparsifying MR Image Reconstruction in Compressive Sensing Copyright © 2011 SciRes. JSIP 51 5. Conclusion We have developed a fast reconstruction method for compressed sensing MRI that is called FRM. The con- vergence of the reconstruction method has been analyzed. The algorithm has been accelerated by continuation on penalty parameters. FRM is compared with TwIST, a state-of-the-art method. We use the two methods to re- construct Phantom image and some real MR images from a partial of observed data. The results of numerical ex- periments on the MR images demonstrate that FRM can achieve much higher performance in terms of SNRs, the relative errors and CPU time than TwIST. We believe that our method can be applied in the area of rapid MR imaging. 6. Acknowledgements This work was supported by the Key Project of Chinese Ministry of Education(No. 109030), 382 Training Pro- gramme of CUC(G08382316) and Science Research Pro- ject of CUC(XNL1003). The authors would like to thank the referees for very useful suggestions here. REFERENCES [1] E. J. Candes, J. Romberg, and T. Tao, “Robust uncer- tainty principles: Exact signal reconstruction from highly incomplete frequency information,” IEEE Trans. Inf. The- ory, Vol. 52, 2006, pp. 489-509. [2] D. L. Donoho, “Compressed sensing,” IEEE Trans. Inf. Theory, Vol. 52, 2006, pp. 1289-1306. [3] E. Candes and J. Romberg, “Sparsity and incoherence in compressive sampling,” Inverse Problems, Vol. 23, 2007, pp. 969-985. [4] B. K. Natarajan, “Sparse approximate solutions to linear systems,” SIAM J. Comput., Vol. 24, 1995, pp.227-234. [5] D. Donoho and X. Huo, “Uncertainty principles and ideal atomic decompositions,” IEEE Trans. Inf.Theory, Vol. 47, 2001, pp. 2845-2862. [6] J. J. Fuchs, “On sparse representations in arbitrary redun- dant bases,” IEEE Trans. Inf. Theory, Vol. 50, 2004, pp. 1341-1344. [7] L. Rudin, S. Osher and E. Fatemi, “Nonlinear total varia- tion based noise removal algorithms,” Physica D, Vol. 60, 1992, pp. 259-268. [8] L. He, T. C. Chang, S. Osher, T. Fang and P. Speier, “MR image reconstruction by using the iterative refinement method and nonlinear inverse scale space methods,” UCLA CAM Report, 2006,06-35. [9] M. Lustig, D. Donoho and J. Pauly, “Sparse MRI: The application of compressed sensing for rapid MR imag- ing,” Magnetic Resonance in Medicine, Vol. 58,2007,pp. 1182-1195. [10] Y. Wang, J. Yang, W. Yin and Y. Zhang, “A alternating minimization algorithm for total variation image recon- struction,” SIAM J. Imag. Sci., Vol. 1, 2008,pp. 248-272. [11] R. Courant, “Variational methods for the solution of problems with equilibrium and vibration,” Bull.Amer. Math. Soc., Vol. 49, 1943, pp. 1-23. [12] M. K. Ng, R. H. Chan and W. C. Tang, “A fast algorithm for deblurring models with Neumann boundary condi- tions,” SIAM J. Sci. Comput., Vol. 21, pp. 851-866, 1999. [13] Z. Opal, “Weak convergence of the sequence of succes- sive approximations for nonexpansive mappings,” Bull. Amer. Math. Soc., Vol. 73, 1967, pp. 591-597. [14] J. Yang, W. Yin and Y.Wang, “A Fast Algorithm for Edge-Preserving Variational Multichannel Image Resto- ration,” SIAM J. Sci. Comput., Vol. 2, 2009, pp. 569-592. [15] J. Yang, Y. Zhang and W. Yin, “A Fast Alternating Di- rection Method for TVL1-L2 Signal Reconstruction From Partial Fourier Data,” IEEE Journal of Selected Topics in Signal Processing, Vol. 4, 2010, pp.288-297. [16] E. T. Hale, W. Yin and Y. Zhang, “A Fixed-Point Con- tinuation for l1−regularization with Application to Com- pressed Sensing,” Rice University CAAM Technical Re- port TR07-07, 2007, pp. 1-45. [17] E. T. Hale, W. Yin and Y. Zhang, “Fixed-Point Continua- tion for l1−Minimization: Methodology and Conver- gence,” SIAM J. Sci. Comput., Vol. 2, 2009, pp. 569-592. [18] J. Bioucas-Dias and M. Figueiredo, “A new TwIST: Two-step iterative thresholding algorithm for image res- toration,” IEEE Trans. Imag. Process., Vol. 16, 2007, pp. 2992-3004. [19] I. Daubechies, M. Defriese and C. De Mol, “An iterative thresholding algorithm for linear inverse problems with a sparsity constraint,” Commun. Pure Appl. Math., Vol. 57, 2004, pp. 1413-1457. [20] A. Chambolle, “An algorithm for total variation minimi- zation and applications,” J. Math. Imaging Vision, Vol. 20, 2004, pp. 89-97. |