S. S. PRASAD, C. KUMAR
46
prolong the lifetime of the whole IoT communication. In
addition, since the BS is also a power-con- suming com-
ponent in IoT communication, great efforts should also
be made on the BS to achieve environment friendly,
green IOT communication.
3.2. Reliability
Reliability is critical for Efficient IoT communication,
because unreliable sensing, processing, and transmission
can cause false monitoring data reports, long delays, and
even data loss, which would reduce people’s interest in
IoT communication. Therefore, the rapid growth of IoT
communication demands high reliability.
Now, let us discuss the EER issues in IoT communica-
tion by surveying several potentially useful solutions to
shed light on this research line.
4. Energy Efficiency in IoT Communication
IoT communication system is dependent upon the
massive sensor nodes to intelligently collect monitoring
data in the IoT domain. It is also dependent on the wired/
wireless network to relay the collected sensory data to
the BS in the network domain, and on the BS, to support
various IoT applications on the network in an application
domain. This is because a massive number of devices are
involved in IoT. The Energy Efficiency (green) becomes
a challenging issue especially in the IoT sensor domain.
IoT Communication dominates energy consumption.
Energy Efficiency can be increased by wisely adjusting
transmission power (to the minimal necessary level), and
carefully applying algorithms and distributing computing
techniques to design efficient communication protocols
(e.g., routing protocols) [5].
It can be further improved by activity scheduling, the
objective of which is to switch some nodes to low-power
operation (“sleeping”) mode so that only a subset of
connected nodes remain active while the functionality
(e.g., sensing and data gathering) of the original network
is preserved. In [6] an activity scheduling scheme is pro-
posed for sensing coverage, which appears to be the best
in the literature. This scheme requires time to be slotted,
and activity scheduling is then done in rounds. In each
round, a node selects a random timeout and listens to
messages from neighbors before it expires. These mes-
sages contain the activity decision (i.e., whether to be
active or not) of their senders.
When the timeout expires, which is solely based on the
received information, the node makes its own activity
decision and announces it to the neighbors by transmit-
ting a message. A node decides to be active if its sensing
range (coverage circle) is fully covered by the sensing
ranges of a connected set of active neighbors.
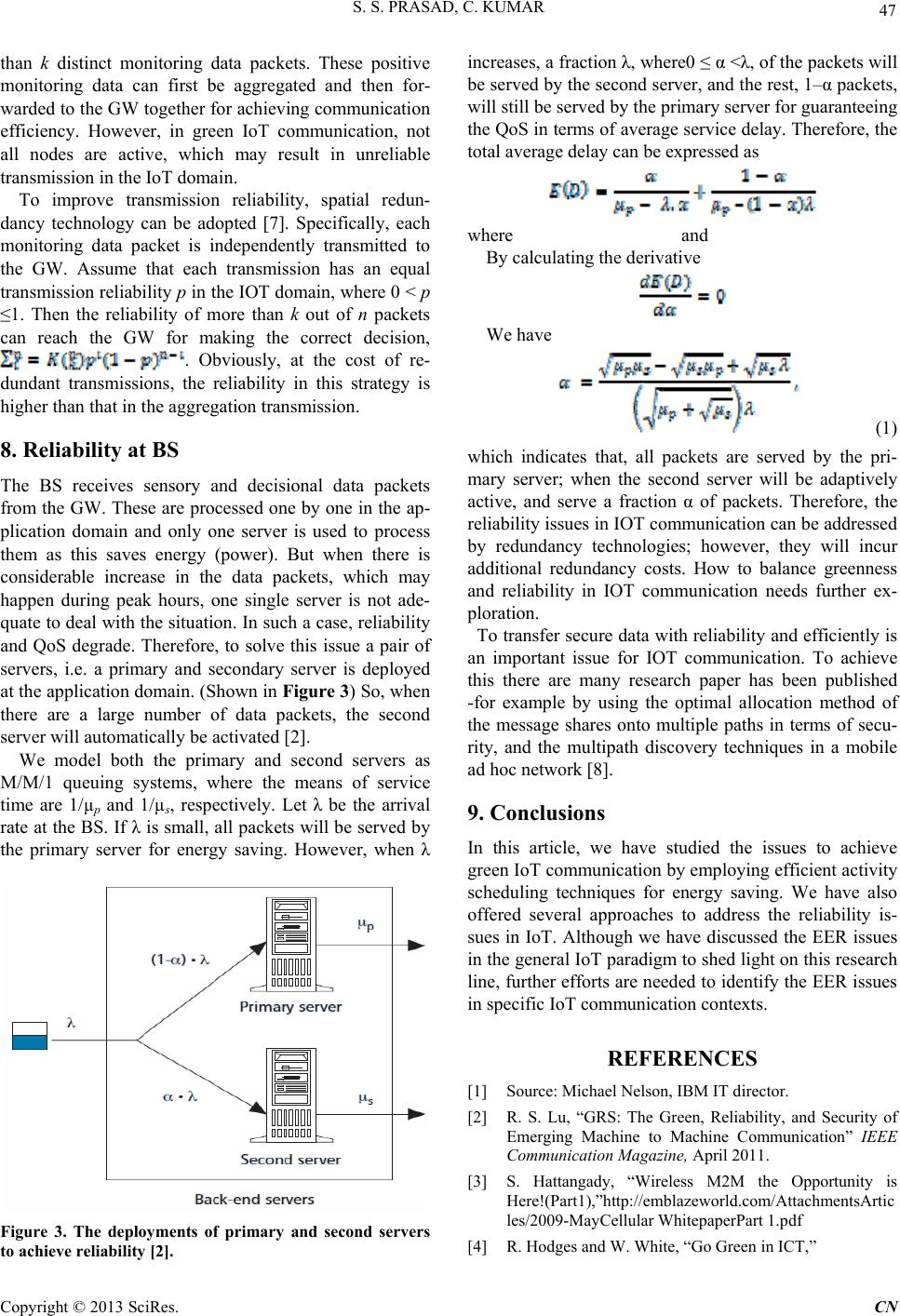
The decision on full coverage is in turn grounded on a
well-known geometric theorem (illustrated in Figure 2,
together with the connectivity consideration): if there are
at least two coverage circles, and any intersection point
of the two circles inside the sensing area is covered by a
third coverage circle, the sensing area is fully covered.
Some nodes may have announced themselves as active,
and later, after receiving new announcements from
neighbors, find that they are fully covered. In this case,
they may change their previous decisions and enter sleep
mode after announcing their new decisions.
The scheme involves local communication only and
generates a very small number of control messages, thus
being Energy Efficient. Simulations based on ideal and
realistic physical layers reveal its advantages over other
similar algorithms. Therefore, the scheme can be applied
to achieve Green communication in the IOT domain.
5. Reliability in IoT Communication
For achieving Green IoT, since not all sensor nodes are
expected to simultaneously be active in the IoT domain,
Reliability is a challenging issue. In order to improve the
Reliability of IoT communication, exploiting redundancy
technologies, including information redundancy, spatial
redundancy, and temporal redundancy, can be an effi-
cient approach for IoT communication. Below, let us
discuss three major Reliability issues in IoT communica-
tion with different redundancy technologies.
6. Reliability in Sensing and Processing
Due to component faults and so on, a single IoT node
may not be sufficient to accurately sense and process
monitoring data. Therefore, a majority vote in green IoT
communication is desirable to improve reliability. In [7],
a local vote decision fusion (LVDF) algorithm is pre-
sented, which can be directly applied in IoT communica-
tion. In LVDF, each IoT node Ni first independently
senses, processes, and makes an initial single-bit decision
di ∈{0, 1} on some event in a specific IoT application,
and shares the decision di with its neighbors NB(i). Giv-
en a set of decisions {di :j∈NB(i)}, node Ni adjusts ini-
tial decision di →zi∈{0, 1} based on the majority vot-
ing strategy. In the end, all updated decisions zi are
communicated to the GW, which again uses majority
voting to make a decision based on zi. Since LVDF is a
corrected decision strategy, it can improve the sensing
and processing reliability in IoT communication with
additional information and temporal redundancy.
7. Reliability in Transmission
Consider that there are n total positive monitoring data
on the same event in the IoT domain, and the GW will
report the decision to the BS only if it can collect more
Copyright © 2013 SciRes. CN