S. M. MEGAHED, A. A. BALBOLA
Copyright © 2013 SciRes. ENG
( )
( )
13
.
01
tt t
bacdbabccdba ba
AF
RRrR PPRP
T
×
+−
=
(41)
( )
(1 3)
.
01
tt
cdbabccdba ba
EF
RrR PPRP
T
×
+−
=
(42)
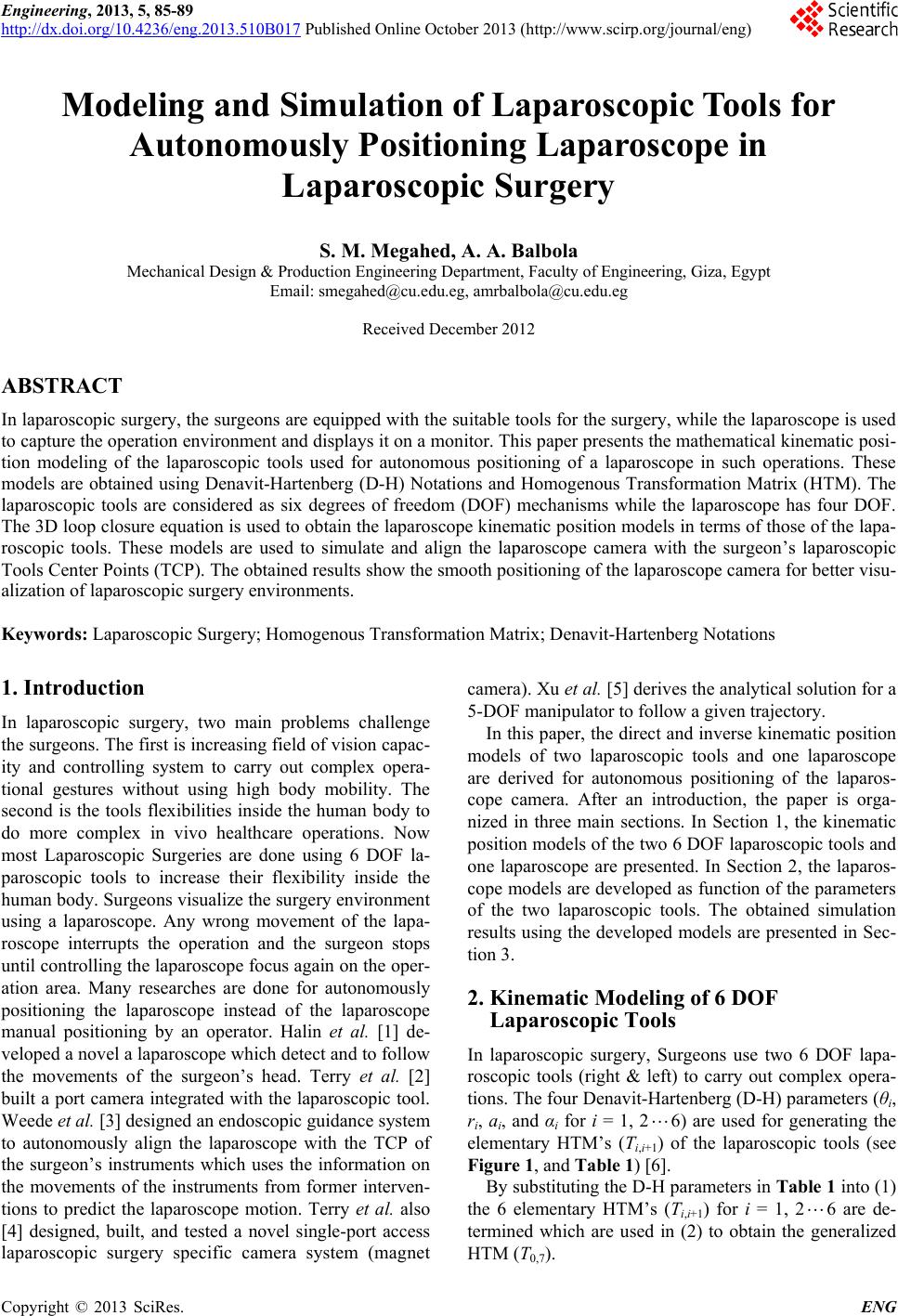
where TBA is the HTM of the right laparoscopic tool, TAB
is the inverse of the HTM of the right laparoscopic tool,
TCD is the HTM of the left laparoscopic tool, TBC is HTM
between the right laparoscopic tool fixed coordinates at
point B and the left laparoscopic tool f ixed coordinates at
C. TAD is the homogenous transformation matrix between
the movable coordinates of the right laparoscopic tool at
point A and the movable coordinates the left laparoscopic
tool at D.
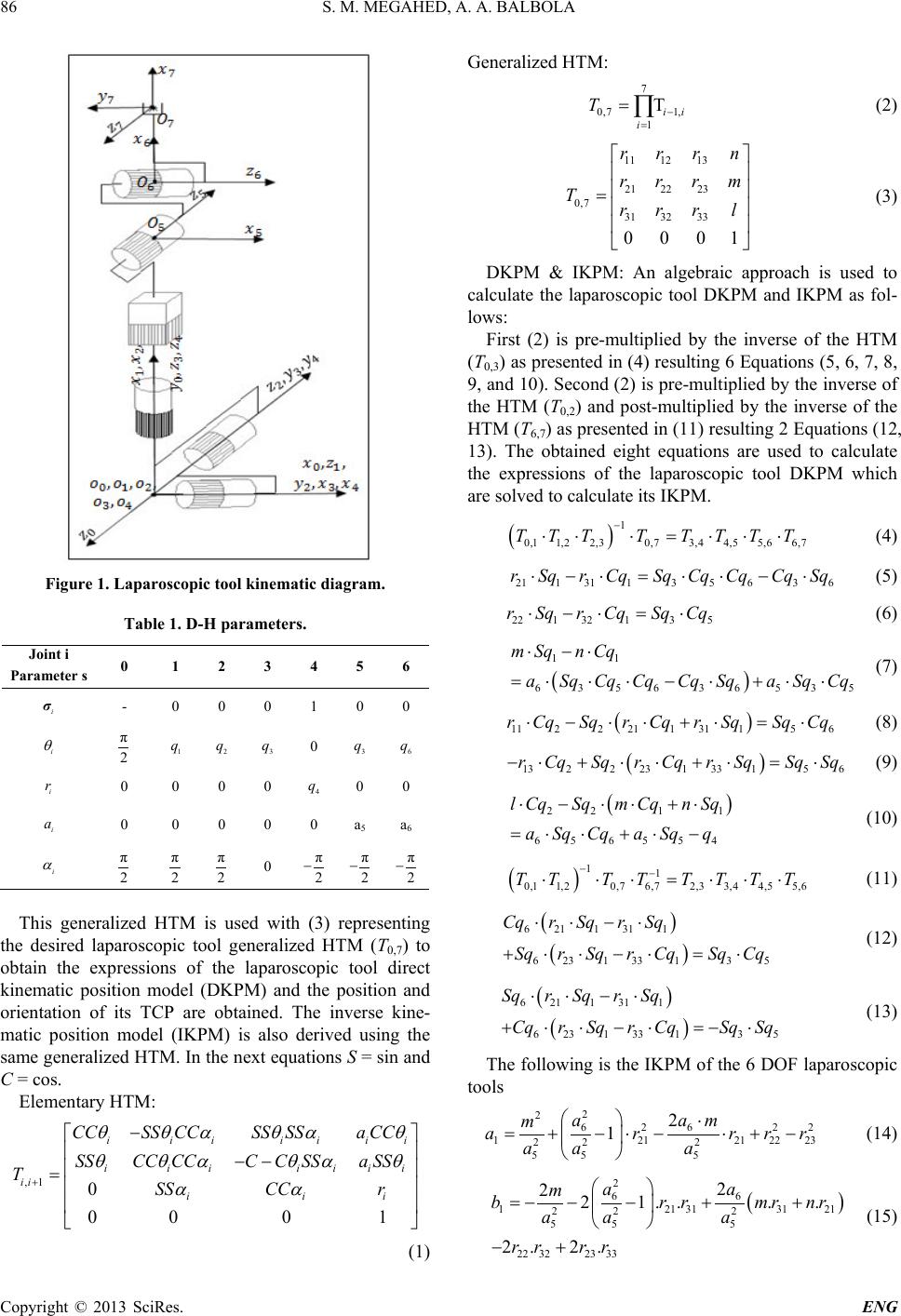
TEF is the HTM of the laparoscope, TEB is the HTM
between the laparoscope fixed coordinates at E and the
right laparoscopic tool fixed coordinates at B. It’s as-
sumed that the coordinates in the same direction so the
rotation matrix is unity matrix and there are only transla-
tion in x, y, z directions. TAF is the HTM between the
movable right laparoscopic tool coordinates at A and the
coordinates at the target point (F) but the translation
vector is a ratio (r) of the translation vector of TAD. The
orientation and position (DKPM) of the laparoscope
Camera are calculated directly from TEF. The laparoscope
parameters are determined in terms of those of the lapa-
roscopi c tools [6].
4. Simulation
During surgery operation, the laparoscopic tool is moved
from one point to another on a certain trajectory. Free
and guided trajectories may be selected to avoid ob-
stacles inside the human body. The laparoscopic tools’
models are executed using any desired time function for
the path of its TCP to perform a certain task. The ob-
tained mathematical models are simulated to show the
best positioning of the laparoscope in a surgery environ-
ment. The spline trajectory is used to simulate these
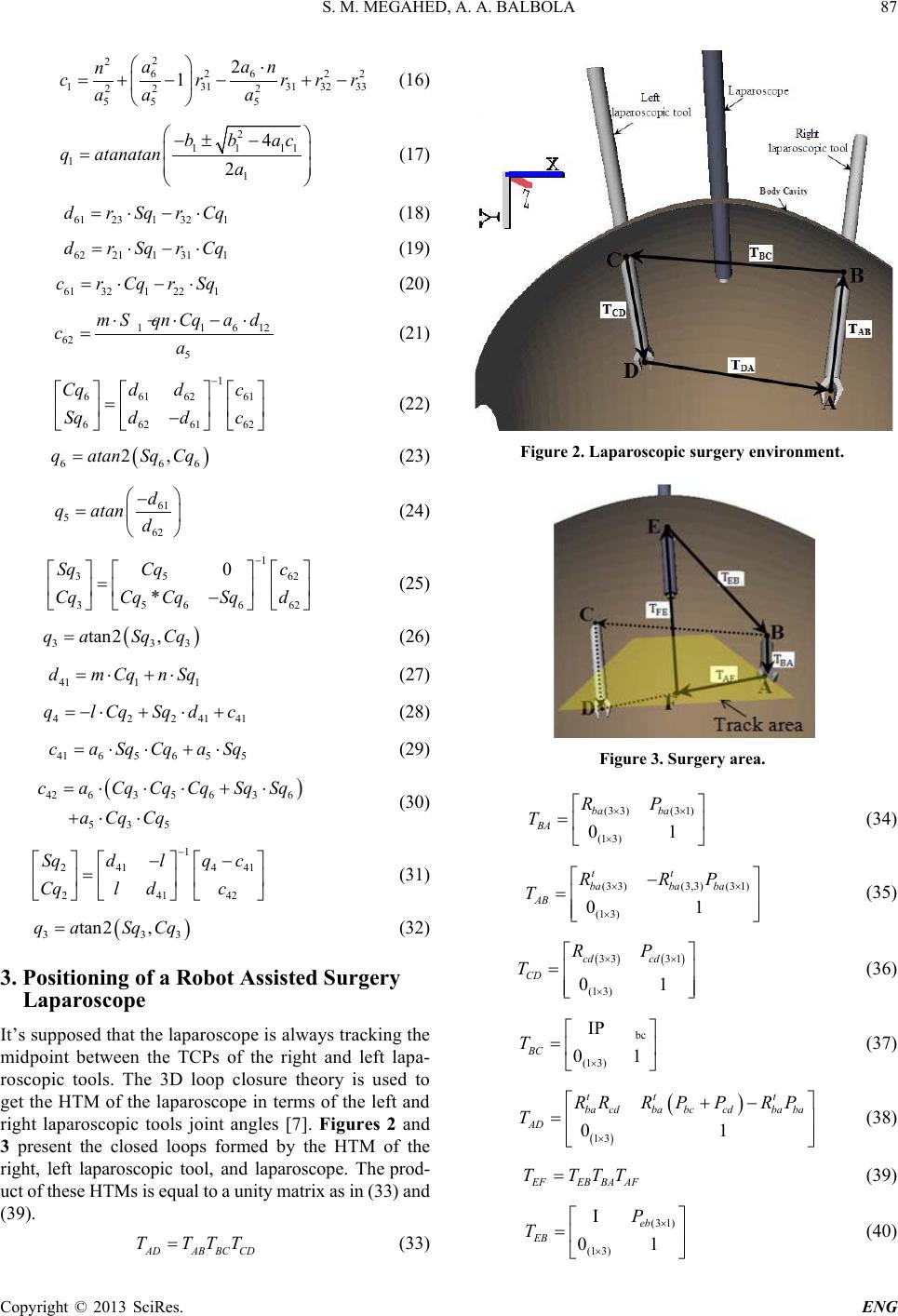
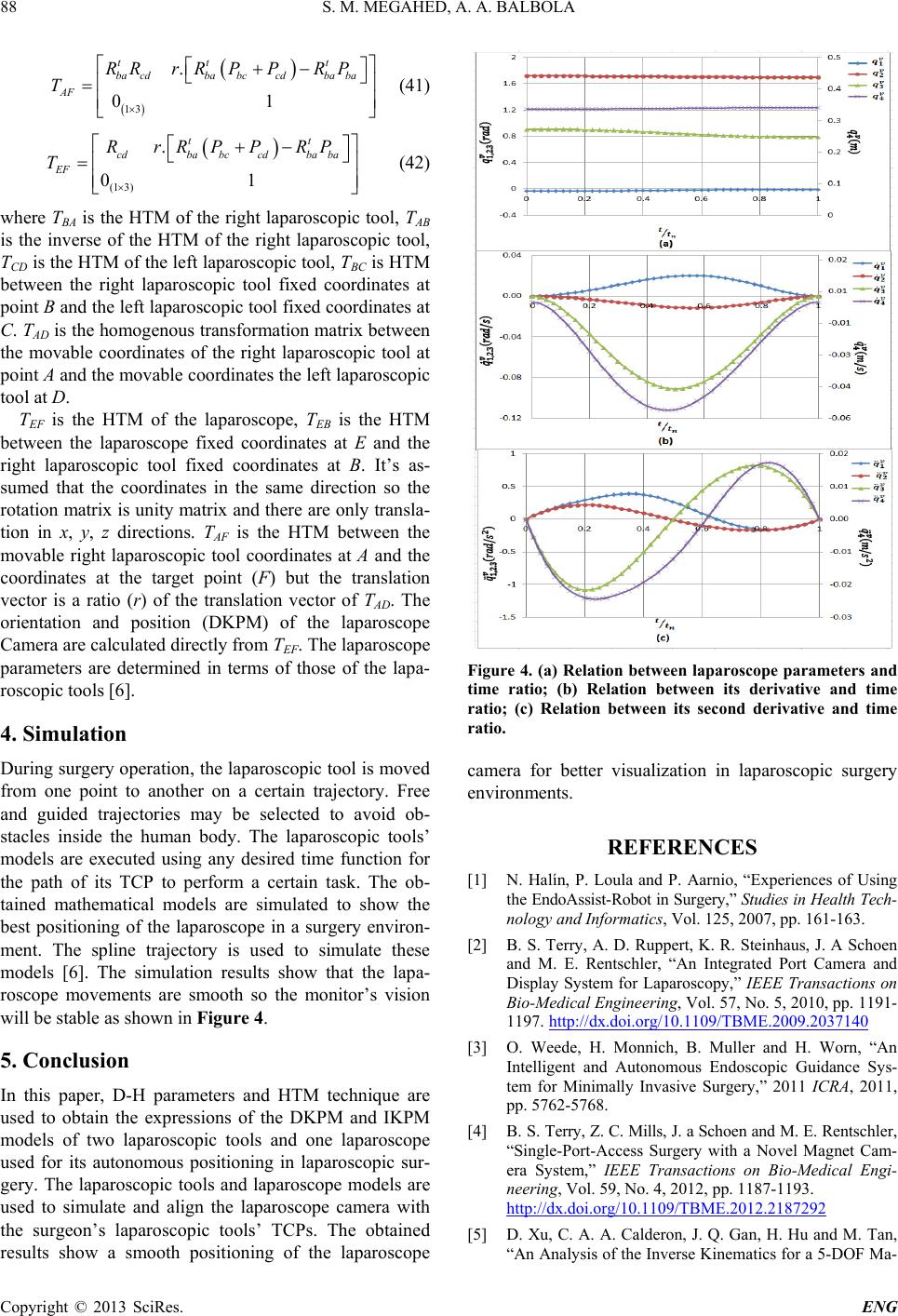
models [6]. The simulation results show that the lapa-
roscope movements are smooth so the monitor’s vision
will be stable as shown in Figure 4.
5. Conclusion
In this paper, D-H parameters and HTM technique are
used to obtain the expressions of the DKPM and IKPM
models of two laparoscopic tools and one laparoscope
used for its autonomous positioning in laparoscopic sur-
gery. The laparoscopic tools and laparoscope models are
used to simulate and align the laparoscope camera with
the surgeon’s laparoscopic tools’ TCPs. The obtained
results show a smooth positioning of the laparoscope
Figure 4. (a) Relation between laparoscope parameters and
time ratio; (b) Relation between its derivative and time
ratio; (c) Relation between its second derivative and time
ratio.
camera for better visualization in laparoscopic surgery
environments.
REFERENCES
[1] N. Halín, P. Loula and P. Aarnio, “Experiences of Using
the EndoAssi st-Robot in Surgery,” Studies in Health Tech-
nology and Informatics, Vol. 125, 2007, pp. 161-163.
[2] B. S. Terry, A. D. Ruppert, K. R. Steinhaus, J. A Schoen
and M. E. Rentschler, “An Integrated Port Camera and
Display System for Laparoscopy,” IEEE Transactions on
Bio-Medical Engineering, Vol. 57, No. 5, 2010, pp. 1191-
1197. http://dx.doi.org/10.1109/TBME.2009.2037140
[3] O. Weede, H. Monnich, B. Muller and H. Worn, “An
Intelligent and Autonomous Endoscopic Guidance Sys-
tem for Minimally Invasive Surgery,” 2011 ICRA, 2011,
pp. 5762-5768.
[4] B. S. Terry, Z. C. Mills, J. a Schoen and M. E. Rentschler,
“Single-Port-Access Surgery with a Novel Magnet Cam-
era System,” IEEE Transactions on Bio-Medical Engi-
neering, Vol. 59, No. 4, 2012, pp. 1187-1193.
http://dx.doi.org/10.1109/TBME.2012.2187292
[5] D. Xu, C. A. A. Calderon, J. Q. Gan, H. Hu and M. Tan,
“An Analysis of the Inverse Kinematics for a 5-DOF Ma-