C. H. Kan
Copyright © 2013 SciRes. EPE
82
[1] P. C. Roberts and R. A. McMahon, “Performance of
BDFM as Generator and Motor, IEE Proceedings, Elec-
tric Power Application, Vol. 153, No. 2, 2006, pp.
289–299.
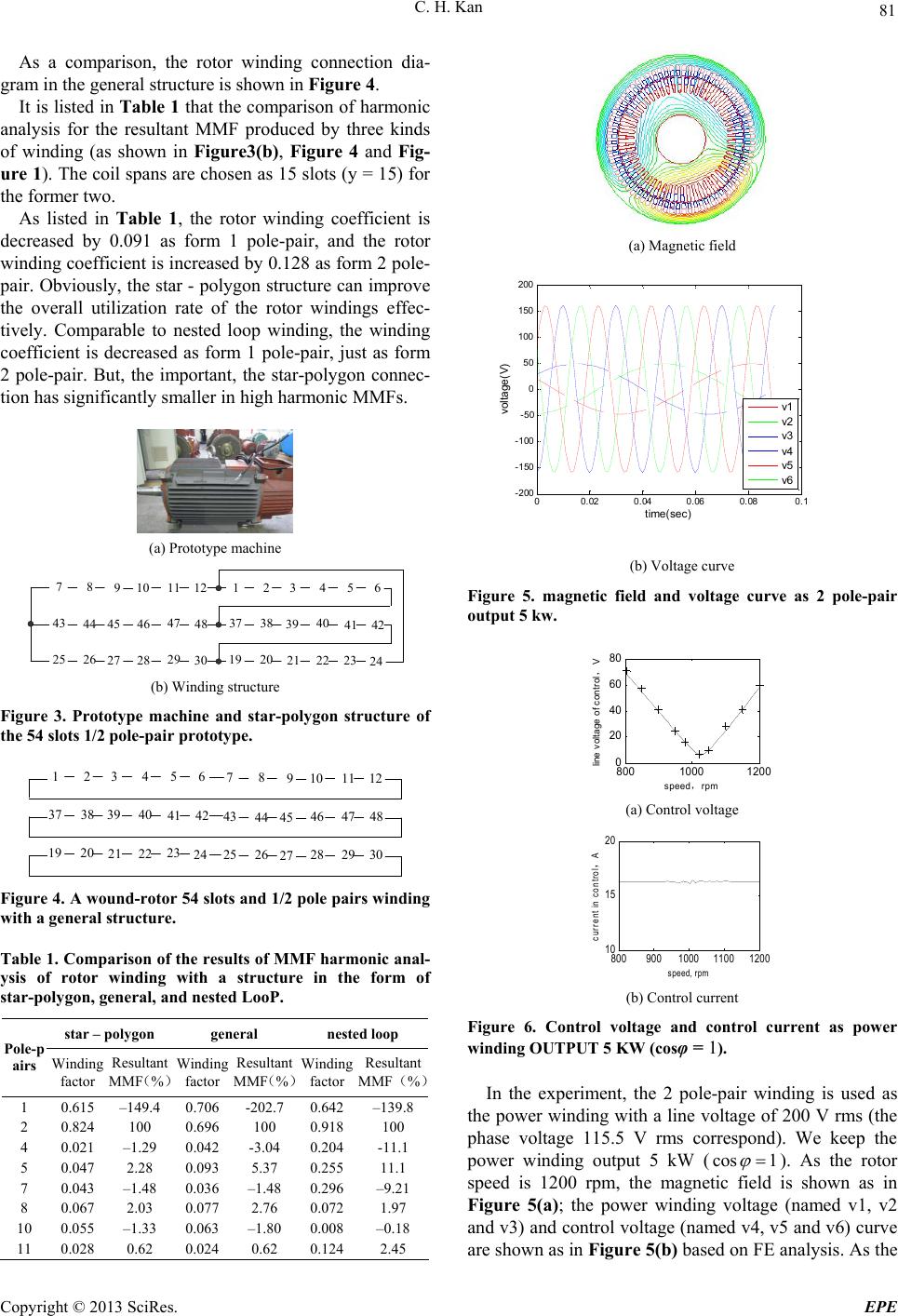
rotor speed is from 800 to 1200 rpm, the control voltage
vs. speed is shown in Figure 6(a); the control current vs.
speed is shown in F igure 6( b ).
As shown in Figure 6(a), the experimental data are
consistent with the calculated results based on FE analy-
sis. Obviously, the star-polygon BDFM can realize the
function of variable-speed constant-voltage constant-
frequency generation.
[2] S. Williamson, A. C. Ferreira and A. K. Wallace, “Gener-
alized Theory of the BDFM. Part 2: Model Verification
and Performance,” IEE Proceedings- Electric Power Ap-
plication, Vol. 144, No. 2, 1997, pp. 123–129.
doi:10.1049/ip-epa:19971052
[3] A. K. Wallace, P. Rochelle and R. Spee, “Rotor Modeling
and Development for BDFMs,” Conference of Record
of the International Conference on Electrical Machines,
Cambridge, Vol. 1, 1990.
4. Conclusions
This paper has presented, for the first time, a new type
rotor winding connection, named star-polygon, for
BDFM. The BDFM with “star- polygon” structure of
rotor windings has the following five characteristics: 1, It
is increased that the rotor winding distribution coefficient
which corresponding to the stator power windings; 2, A
set of rotor slot conductors is used repeatly, improving
the actual utilization of the rotor slot conductors; 3, The
choice of winding pitch is freedom; 4, The connection of
rotor winding is flexible; 5, The content of harmonic
MMFs is low. So this new type structure of rotor wind-
ings has great development prospects.
[4] X. Wang and P. C. Roberts, “Optimization of Bdfm Sta-
tor design Using an Equivalent Circuit Model and a
Search Method,” In Proc, IEE 3th Int. Conf. Power Elec-
tronics, Machines and Drives, Dublin, Ireland, 2006, pp.
606-610.
[5] X. Wang, R. A. McMabon and P. J. Tavner, “Design of
the Brushless Doubly-fed (induction) Machine,” IEEE
Interaction Election Machines &Drives Conference,
IEMDC’07, Vol. 2, 2007, pp.1508-1513.
[6] X. F. Wang, “A New BDFM with a Wound-rotor Chang-
ing-pole Winding,” Proceedings of the CSEE, Vol. 23,
No. 6, 2003, pp. 108-111.
5. Acknowledgements [7] S. C. Yang, “Feature of Electromagnetic Design for
BDFMs,” Proceedings of the CSEE, Vol. 21, No. 7, 2001,
pp. 107-110.
This work was supported by the Surface of Natural Sci-
ence Fund Program projects of Anhui Province (NO.12
08085ME62), by the Doctoral Degree in Special Re-
search Fund Program projects of hfut (NO. 2011HGBZ-
0935).
[8] F. G. Zhang, F. X. Wang and Z. Wang, “Comparative
Experiment Study on the Performance of Doubly-fed),”
Proceedings of the CSEE, Vol. 22, No. 4, 2002, pp.
52-55.
The authors wish to thank the China Changjiang Na-
tional Shipping Group Motor Factory for the provision of
the prototype machine and fabrication of the rotor.
[9] C. H. Kan and X. F. Wang, “Harmonic Anslysis for
Wound-rotor Winding in Induction Manchine,” Large
electric manchine and hydraulic turbine., Vol. 4, 2007,
pp. 18–23.
[10] S. Z. Xu, “Windings Theory of A.C. Machines,” Publish-
ing House of Machinery Industry, 1985.
REFERENCES
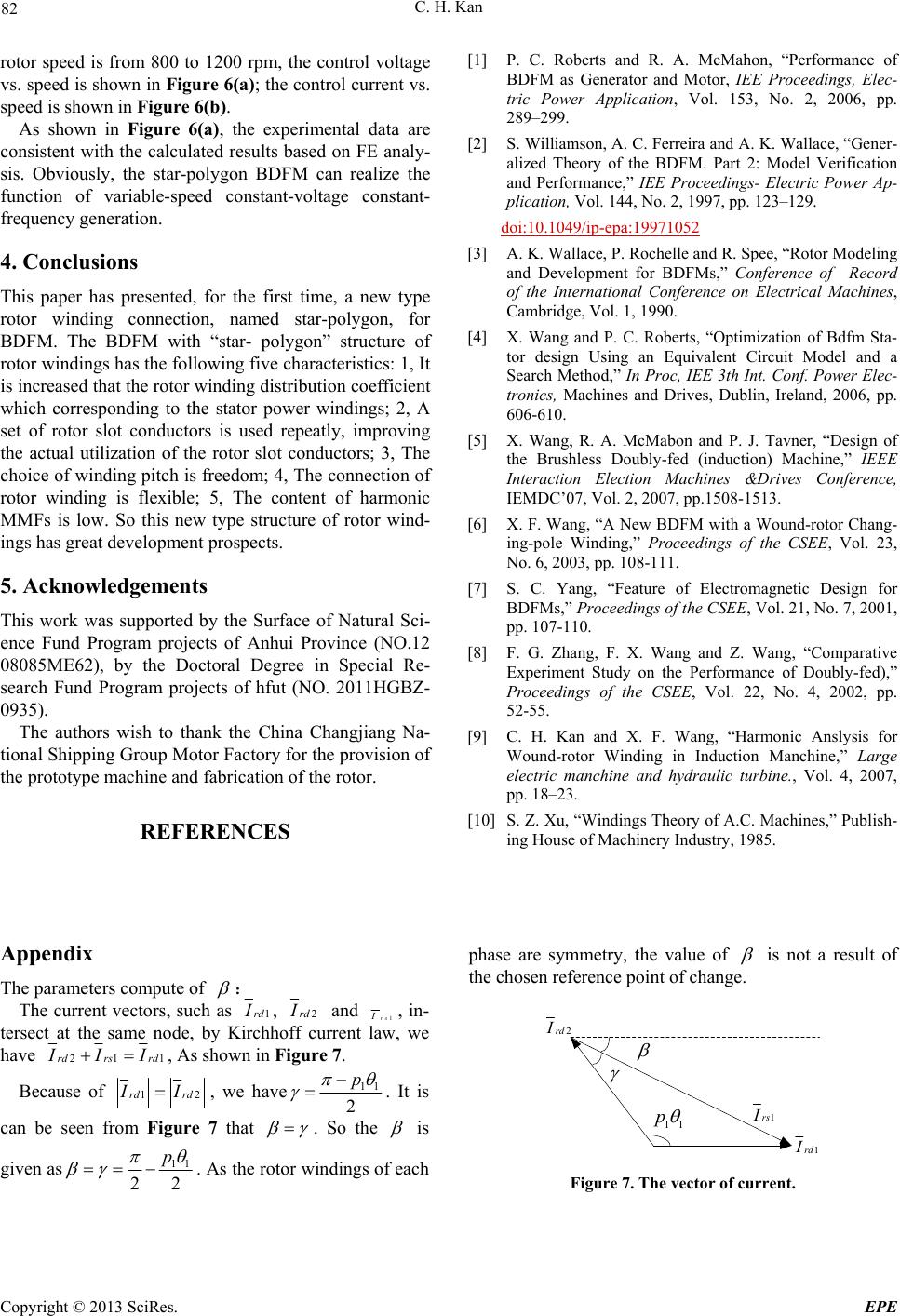
Appendix phase are symmetry, the value of
is not a result of
the chosen reference point of change.
The parameters compute of
:
The current vectors, such as 1rd
, 2rd
and 1rs
, in-
tersect at the same node, by Kirchhoff current law, we
have 21rdrs rd
1rd
2rd
1rs
11
p
1
II, As shown in Figure 7.
Because of 1rdrd 2
I, we have11
2
p
. It is
can be seen from Figure 7 that
. So the
is
given as11
22
p
. As the rotor windings of each Figure 7. The vector of current.