Open Journal of Applied Sciences, 2013, 3, 35-40
doi:10.4236/ojapps.2013.32B007 Published Online June 2013 (http://www.scirp.org/journal/ojapps)
Directly Driven RO System by PV Solar Panel Arrays
Moustafa Elshafei1, Anwar Khalil Sheikh2, Naseer Ahmad2
1Systems Engineering Department, KFUPM, Dhahran, Saudi Arabia
2Department of Mechanical Engineering, KFUPM, Dhahran, Saudi Arabia
Email: elshafei@kfupm.edu.sa, anwarks@kfupm.ed.sa, nahmad@kfupm.edu.sa
Received 2013
ABSTRACT
In this work the performance evaluation of directly driven Reverse Osmosis (RO) water desalination system by Photo-
voltaic (PV) arrays is investigated by a novice method. Reverse Osmosis water desalination system needs continuous
supply of energy and on the other hand energy from the PV is intermittent in nature. The energy consumption of RO
plant is strong function of clean water (permeate) flow rate and system pressure and they needs to be tuned to match the
maximum power provided by the PV arrays. In this work a novice method to tune the RO system parameters by ma-
nipulating the position of the valve at the brine side of the RO system is proposed. A simple perturb and observe algo-
rithm is used for automatic control of the valve position. The performance of the proposed battery less system is com-
pared with a conventional system using PV, charge controller and battery. The proposed directly driven battery-less
system provides more water per day than battery operated system.
Keywords: PVRO System; Maximum Power Point Tracking; Reverse Osmosis; Desalination, Renewable Energy
1. Introduction
Safe drinking water shortage in the world has necessi-
tated research and development in the sea and brackish
water desalination based on renewable energies [1]. In
the recent years, the interest in the use of reverse osmosis
membrane desalination has increased due to the energy
efficiency and versatility of this process relative to other
water desalination technologies [2]. When operating the
reverse osmosis desalination unit it is imperative that
system conditions are monitored and maintained at ap-
propriate set points in order to produce the required
amount of clean, portable water while preventing system
damage [3]. It is also desirable to find the operating
methods to reduce the energy consumption of the reverse
osmosis desalination plant in the presence of variability
of feed water salinity and input power.
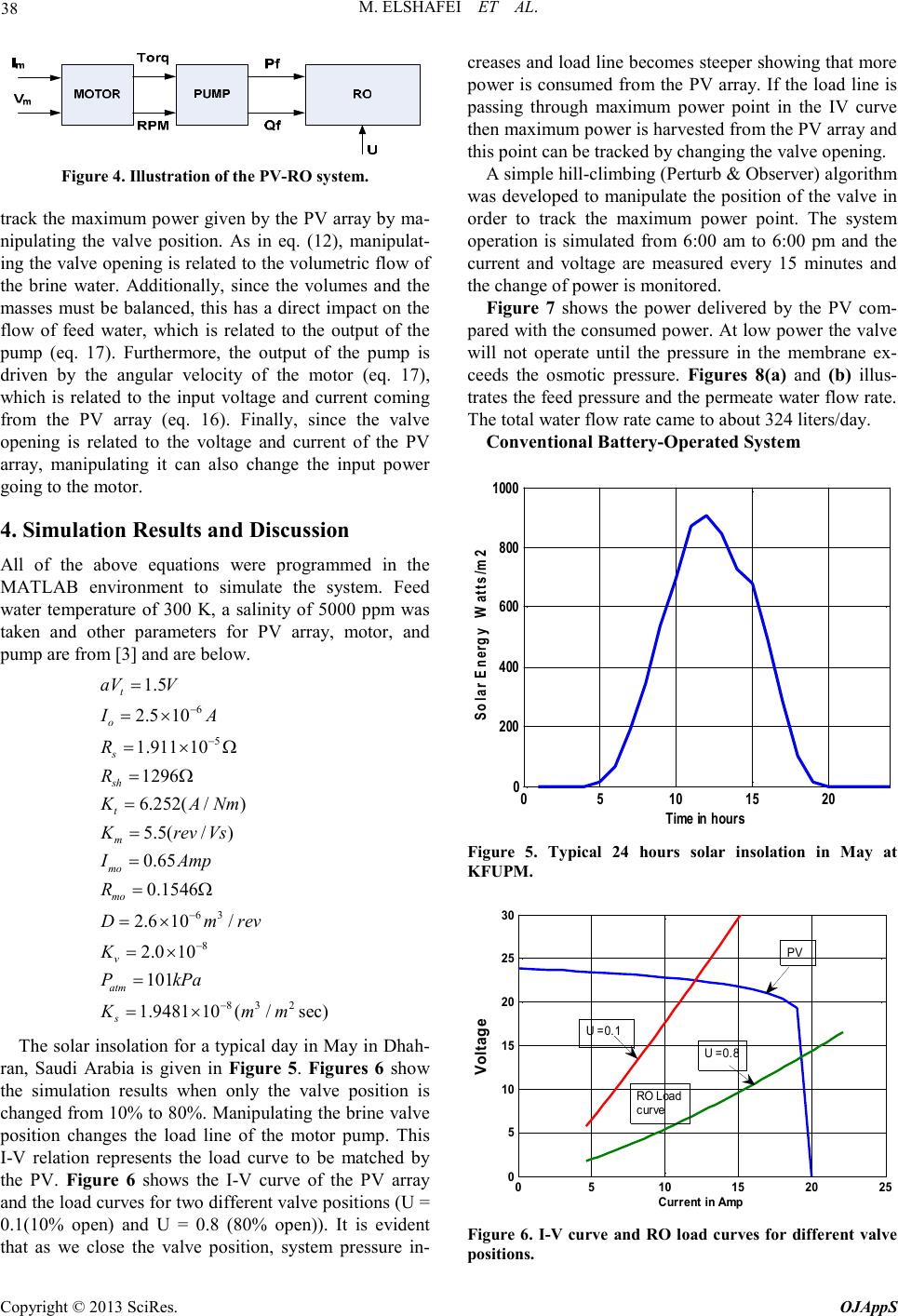
PV-powered reverse osmosis is considered one of the
most promising forms of renewable energy powered de-
salination, especially when it is used in remote areas.
PV-RO initially is most cost-competitive for small-scale
systems where other technologies are less competitive [4].
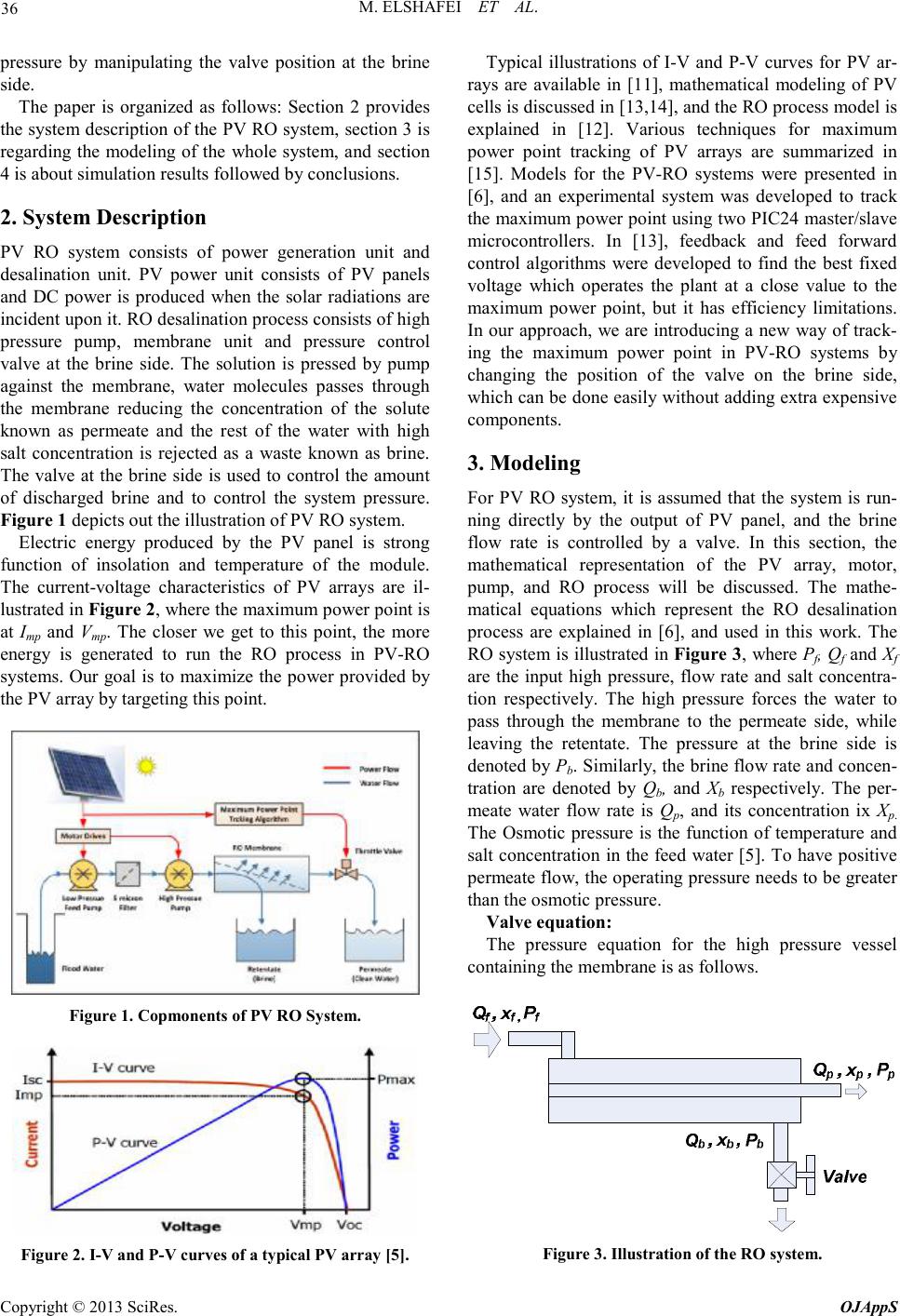
In RO filtration process salty water is pressurized to flow
through a membrane, causing a separation of the saline
solution from the solute. The energy required to pressur-
ize the feed water is the major energy needed for the RO
process [5]. Reverse Osmosis is a scalable process, but
the energy efficiency decreases on small-scale systems.
Different control algorithms can be utilized to improve
the efficiency and feasibility of PV-RO systems [6].
Several research groups in the world have shown in-
terest and working to integrate the RO process to the PV
panels to minimize the environmental effects, improve
the effectiveness and efficiency and to reduce the spe-
cific energy consumption by different design considera-
tions. The solar power is varying in nature and a control
algorithm was developed in [10] to track the maximum
power point in the PV array for the PV-RO system.
Thomson et al [7] proposed a small scale reverse osmosis
system driven by PV system delivering 640 liter/day of
potable water. In the system the maximum power utiliza-
tion in ensured by manipulating the speed of the AC mo-
tor using inverter (driving the high pressure pump) and
system pressure is adjusted by the energy recovery de-
vice. S. Abdullah et al [8] has integrated the RO system
with PV system and investigated the effect of fixed and
tracking panel on the output of permeate water and en-
sured the maximum utilization of the available energy by
changing the speed of the DC motor (driving the high
pressure pump). Bartman et al. [9] has proposed a
nonlinear control system having the capability to change
the speed of motor and valve position simultaneously to
find out optimal point of operation with minimum spe-
cific energy consumption. The power source of the sys-
tem is from the grid and there is no constraint on the
availability of the power. In our work we have devised
the strategy to make the full utilization of the energy
available from the PV panels by keeping the flow rate of
the input water as constant and changing the system
Copyright © 2013 SciRes. OJAppS