An Improved Line Search and Trust Region Algorithm
Copyright © 2013 SciRes. JSEA
52
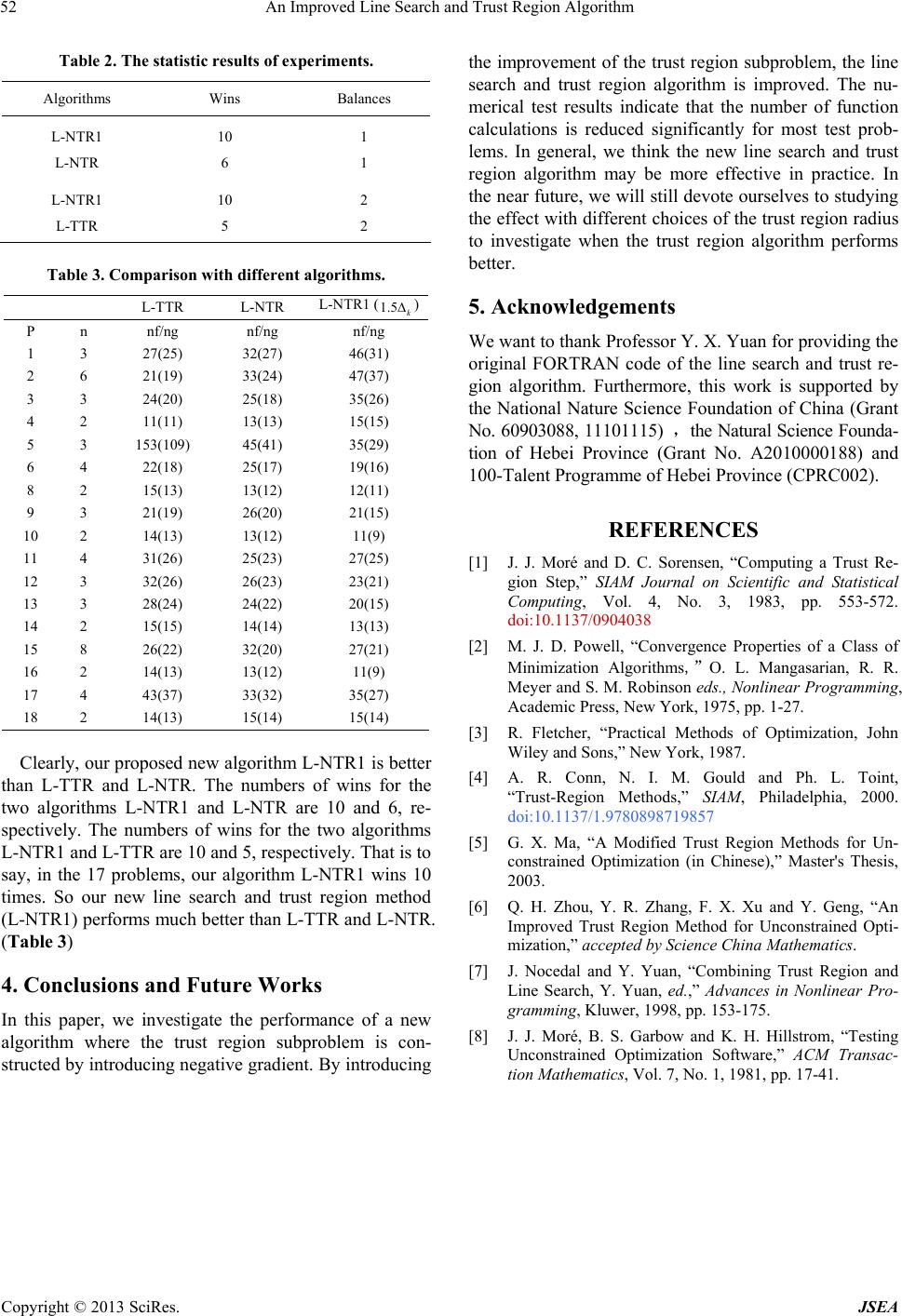
Table 2. The statistic results of experiments.
Algorithms Wins Balances
L-NTR1
L-NTR
10
6
1
1
L-NTR1
L-TTR
10
5
2
2
Table 3. Comparison with different algorithms.
L-TTR L-NTR
L-NTR1 (1.5k
)
P n nf/ng nf/ng nf/ng
1 3 27(25) 32(27) 46(31)
2 6 21(19) 33(24) 47(37)
3 3 24(20) 25(18) 35(26)
4 2 11(11) 13(13) 15(15)
5 3 153(109) 45(41) 35(29)
6 4 22(18) 25(17) 19(16)
8 2 15(13) 13(12) 12(11)
9 3 21(19) 26(20) 21(15)
10 2 14(13) 13(12) 11(9)
11 4 31(26) 25(23) 27(25)
12 3 32(26) 26(23) 23(21)
13 3 28(24) 24(22) 20(15)
14 2 15(15) 14(14) 13(13)
15 8 26(22) 32(20) 27(21)
16 2 14(13) 13(12) 11(9)
17 4 43(37) 33(32) 35(27)
18 2 14(13) 15(14) 15(14)
Clearly, our proposed new algorithm L-NTR1 is better
than L-TTR and L-NTR. The numbers of wins for the
two algorithms L-NTR1 and L-NTR are 10 and 6, re-
spectively. The numbers of wins for the two algorithms
L-NTR1 and L-TTR are 10 and 5, r espectively. Th at is to
say, in the 17 problems, our algorithm L-NTR1 wins 10
times. So our new line search and trust region method
(L-NTR1) performs much better than L-TTR and L-NTR.
(Table 3)
4. Conclusions and Future Works
In this paper, we investigate the performance of a new
algorithm where the trust region subproblem is con-
structed by introducing negative gradient. By introducing
the improvement of the trust region subproblem, the line
search and trust region algorithm is improved. The nu-
merical test results indicate that the number of function
calculations is reduced significantly for most test prob-
lems. In general, we think the new line search and trust
region algorithm may be more effective in practice. In
the near future, we will still devote ourselves to studying
the effect with different choices of the trust region radius
to investigate when the trust region algorithm performs
better.
5. Acknowledgements
We want to thank Prof essor Y. X. Yuan for prov idin g the
original FORTRAN code of the line search and trust re-
gion algorithm. Furthermore, this work is supported by
the National Nature Science Foundation of China (Grant
No. 60903088, 11101115) ,the Natural Science Founda-
tion of Hebei Province (Grant No. A2010000188) and
100-Talent Progr amme of Hebei Province (CPRC002).
REFERENCES
[1] J. J. Moré and D. C. Sorensen, “Computing a Trust Re-
gion Step,” SIAM Journal on Scientific and Statistical
Computing, Vol. 4, No. 3, 1983, pp. 553-572.
doi:10.1137/0904038
[2] M. J. D. Powell, “Convergence Properties of a Class of
Minimization Algorithms,”O. L. Mangasarian, R. R.
Meyer and S. M. Robinson eds., Nonlinear Programming,
Academic Press, New York, 1975, pp. 1-27.
[3] R. Fletcher, “Practical Methods of Optimization, John
Wiley and Sons,” New York, 1987.
[4] A. R. Conn, N. I. M. Gould and Ph. L. Toint,
“Trust-Region Methods,” SIAM, Philadelphia, 2000.
doi:10.1137/1.9780898719857
[5] G. X. Ma, “A Modified Trust Region Methods for Un-
constrained Optimization (in Chinese),” Master's Thesis,
2003.
[6] Q. H. Zhou, Y. R. Zhang, F. X. Xu and Y. Geng, “An
Improved Trust Region Method for Unconstrained Opti-
mization,” accepted by Scie nce China Mathemati cs .
[7] J. Nocedal and Y. Yuan, “Combining Trust Region and
Line Search, Y. Yuan, ed.,” Advances in Nonlinear Pro-
gramming, Kluwer, 1998, pp. 153-175.
[8] J. J. Moré, B. S. Garbow and K. H. Hillstrom, “Testing
Unconstrained Optimization Software,” ACM Transac-
tion Mathematics, Vol. 7, No. 1, 1981, pp. 17-41.


