A Journal of Software Engineering and Applications, 2013, 6, 1-5
doi:10.4236/j s ea.2 013.65B001 Published Online May 2013 (http://www.scirp.org/journal/jsea)
Copyright © 2013 SciRes. JSEA
An Adaptive P art i cle F i lt er Based Method for Real Time
Face Tracki ng
Wei-Ming Chen, Yi-Lung Lin, Ya-Hsiung Hsieh
Institute of Computer Science and Information Engineering, National Ilan University, Chinese Taipei.
Email: wmchen@niu.edu.tw, r9943013@niu.edu.tw, r0143002@niu.edu.tw
Received 2013
ABSTRACT
The video surveillance systems of recent years, usually major focus on the Human-Face of observation and detection.
Human-Face is the most characteristic and prominent feature of a human, therefore, detection and tracking of Hu-
man-Face has beco me an important indicator of the study. This paper discusses video surveillance of public places and
maj ors in automated face detection and face tracking. The main detection method is the use of Haar-Like Feature-based
and through the Cascade classifier of the Adaboost face detection. In the tracking mechanism is based on particle filter
and we modified SURF (Speeded up Robust Features) particle filter tracking, and thus enhance the detection and tra ck-
ing accuracy.
Keywords: Particle Filte r; Adaboost; Haar-Like Feature; SURF
1. Introduction
As the information technology made progress and the
hardware has been improved in recent years, the calcula-
tion speed is much higher and the application is more
diverse. In the image-processing field, it is easier to get
images with better quality thru current hardware device
and we can easily do analysis and process via images.
Plus that there are a verity of multi-media products, such
as digital camera, digital video, 3D digital TV, digital
monitoring system, HMI, image-processing software,
etc…, which makes image-processing technology more
popular and important. The application of human-face
detection/recognition and human-face tracking in mul-
ti-media field is getting more diverse. For example, the
auto-focus of human face inside digital camera can let
people take pictures with better quality. The function of
human-face re c ogni t io n in mo ni to r in g s ys te m o r ent rance
security indicates the importance of human face tracking
and recognition in image-processing technology.
The technology of human face recognition is to judge
whether there exists human-faces or not inside a picture
or video. If there exists a human face, it will locate the
size and position of human face by the algorithm of hu-
man-face location. Meanwhile, it will predict the p ossible
position of next human-face by tracking technology and
associated in formation.
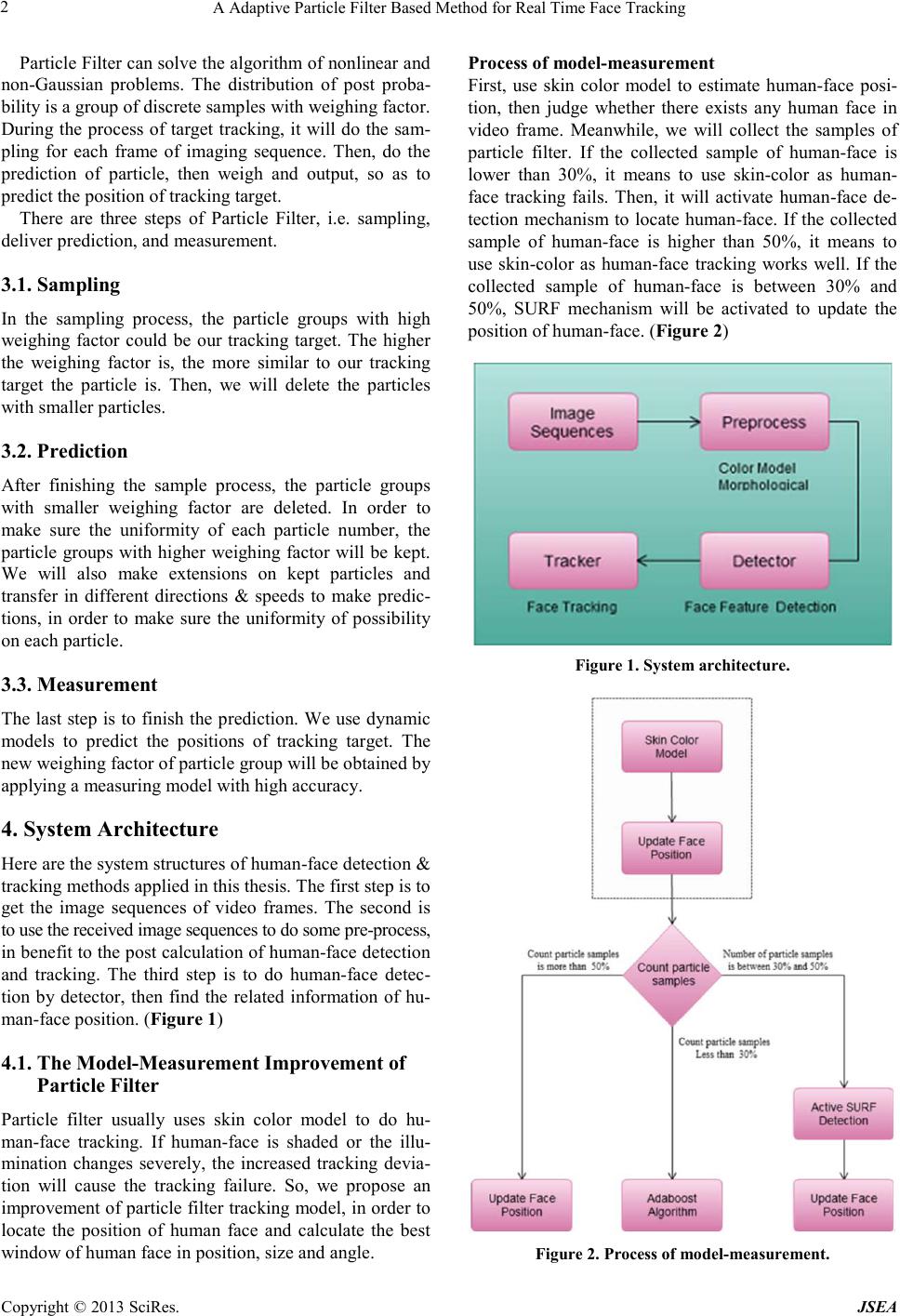
2. Skin Color Model Face Detection
The technology of image tracking has wide applicatio ns
in man y fie lds, suc h as monit oring s ystem, r obot naviga-
tion, missile tracking etc… You can find image tracking
in these fields. The most common application upon im-
age tracking is Kalman Filter. Recent years, there exists a
tracking technology which can perform more efficiently
& accurately and also can deal with more complicated
environment & nonlinear Gaussian Model. This tech-
nology is called Particle Filter, which is a latest tracking
method.
The direction of this thesis is the technology of hu-
man-face detection & tracking. The technology of hu-
man-face detection is to judge whether there exists any
human-face in a picture or video sequence and to locate
the size & position of human-face. The general human-
face detection technology is to do detection & tracking
based on the model of skin colour, but this method will
be affected by illuminations easily. This thesis uses the
method of Adaboost [1] to do human face detection. In
human-face tracking, we improve Particle Filter to do
human-face tracking, in order to achieve a human-face
tracking system with better efficiency and accuracy.
3. Particle Filter
We usually use Kalman Filter to track targets under com-
plicated environment, but the target must follow Gaus-
sian distribution by using Kalman Filter. Ho wever, there
are many reasons to cause the existence of nonlinear and
non Ga uss ia n d ist ri b utio n i n r ea lit y, suc h a s j u mpi ng c ha ng e
of tracking tar get. This will lead to a bad trac king result.