M. Z. BERNARD ET AL.
Copyright © 2013 SciRes. ENG
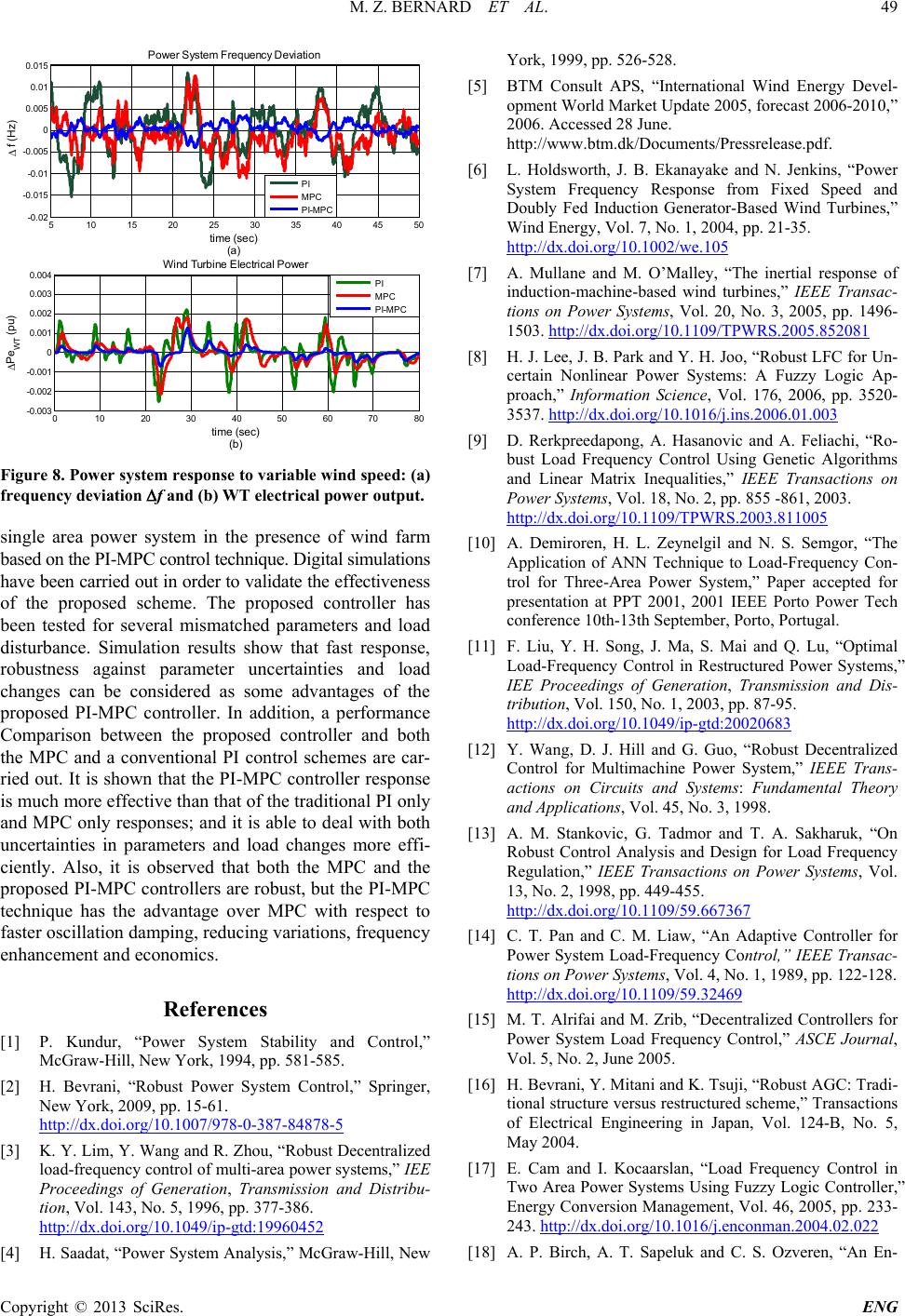
Figure 8. Power system response to variable wind speed: (a)
frequency deviation ∆f and (b) WT electrical power output.
single area power system in the presence of wind farm
based on the P I-M PC control technique. Digital simulations
have been carried out in order to validate the effectiveness
of the proposed scheme. The proposed controller has
been tested for several mismatched parameters and load
disturbance. Simulation results show that fast response,
robustness against parameter uncertainties and load
changes can be considered as some advantages of the
proposed PI-MPC controller. In addition, a performance
Comparison between the proposed controller and both
the MPC and a conventional PI control schemes are car-
ried out. It is shown that the PI-MPC controller response
is much more effective than that of the traditional PI only
and MPC only respon ses; and it is able to deal with both
uncertainties in parameters and load changes more effi-
ciently. Also, it is observed that both the MPC and the
proposed PI-MPC controllers are ro bust, but the PI-MPC
technique has the advantage over MPC with respect to
faster oscillation damping, reducing variations, frequency
enhancement and economics.
References
[1] P. Kundur, “Power System Stability and Control,”
McGraw-Hill, New York, 1994, pp. 581-585.
[2] H. Bevrani, “Robust Power System Control,” Springer,
New York, 2009, pp. 15-61.
http://dx.doi.org/10.1007/978-0-387-84878-5
[3] K. Y. Lim, Y. Wang and R. Zhou, “Robust Decentralized
load-frequency control of multi-area powe r systems,” IEE
Proceedings of Generation, Transmission and Distribu-
tion, Vol. 143, No. 5, 1996, pp. 377-386.
http://dx.doi.org/10.1049/ip-gtd:19960452
[4] H. Saadat, “Powe r System Analysis,” McGraw-Hill, New
York, 1999, pp. 526-528.
[5] BTM Consult APS, “International Wind Energy Devel-
opment World Market Update 2005, forecast 2006-2010,”
2006. Accessed 28 June.
http://www.btm.dk/Documents/Pressrelease.pdf.
[6] L. Holdsworth, J. B. Ekanayake and N. Jenkins, “Power
System Frequency Response from Fixed Speed and
Doubly Fed Induction Generator-Based Wind Turbines,”
Wind Energy, Vol. 7, No. 1, 2004, pp. 21-35.
http://dx.doi.org/10.1002/we.105
[7] A. Mullane and M. O’Malley, “The inertial response of
induction-machine -based wind turbines,” IEEE Transac-
tions on Power Systems, Vol. 20, No. 3, 2005, pp. 1496-
1503. http://dx.doi.org/10.1109/TPWRS.2005.852081
[8] H. J. Lee, J. B. Park and Y. H. Joo, “Robust LFC for Un-
certain Nonlinear Power Systems: A Fuzzy Logic Ap-
proach,” Information Science, Vol. 176, 2006, pp. 3520-
3537. http://dx.doi.org/10.1016/j.ins.2006.01.003
[9] D. Rerkpreedapong, A. Hasanovic and A. Feliachi, “Ro-
bust Load Frequency Control Using Genetic Algorithms
and Linear Matrix Inequalities,” IEEE Transactions on
Power Systems, Vol. 18, No. 2, pp. 855 -861, 2003.
http://dx.doi.org/10.1109/TPWRS.2003.811005
[10] A. Demiroren, H. L. Zeyne l gi l and N. S. Semgor, “The
Application of ANN Technique to Load-Frequency Con-
trol for Three-Area Power System,” Paper accepted for
presentation at PPT 2001, 2001 IEEE Porto Power Tech
conference 10th-13th September, Porto, Portugal.
[11] F. Liu, Y. H. Song, J. Ma, S. Mai and Q. Lu, “Optimal
Load-Frequency Control in Restructured Power Systems,”
IEE Proceedings of Generati on, Transmission and Dis-
tribution, Vol. 150, No. 1, 2003, pp. 87-95.
http://dx.doi.org/10.1049/ip-gtd:20020683
[12] Y. Wang, D. J. Hill and G. Guo, “Robust Decentralized
Control for Multimachine Power System,” IEEE Trans-
actions on Circuits and Sy stems: Fundamental Theory
and Applications, Vol. 45, No. 3, 1998.
[13] A. M. Stankovic, G. Tadmor and T. A. Sakharuk, “On
Robust Control Analysis and Design for Load Frequency
Regulation,” IEEE Transactions on Power Systems, Vol.
13, No. 2, 1998, pp. 449-455.
http://dx.doi.org/10.1109/59.667367
[14] C. T. Pan and C. M. Liaw, “An Adaptive Controller for
Power System Load-Frequency Control,” IEEE Transac-
tions on Power Systems, Vol. 4, No. 1, 1989, pp. 122-128.
http://dx.doi.org/10.1109/59.32469
[15] M. T. Alrifai and M. Zr ib, “Decentralized Controllers for
Power System Load Frequency Control,” ASCE Journal,
Vol. 5, No. 2, June 2005.
[16] H. Bevrani, Y. Mitani and K. Tsuji, “Robust AGC: Tradi-
tional structure versus restructured scheme,” Transactions
of Electrical Engineering in Japan, Vol. 124-B, No. 5,
May 2004.
[17] E. Cam and I. Kocaarslan, “Load Frequency Control in
Two Area Power Systems Using Fuzzy Logic Controller,”
Energy Conversion Management, Vol . 46, 2005, pp. 233-
243. http://dx.doi.org/10.1016/j.enconman.2004.02.022
[18] A. P. Birch, A. T. Sapeluk and C. S. Ozveren, “An En-
510152025303540 45 50
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015 Power System Frequency Dev iat ion
time (sec)
(a)
∆ f (Hz)
PI
MPC
PI-MPC
010 20 30 40 50 60 70 80
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
time (sec)
(b)
∆Pe
WT
(p u)
Win d Tur bine El ect r ical Pow er
PI
MPC
PI-MPC