Y. SUN ET AL.
Copyright © 2013 SciRes. CN
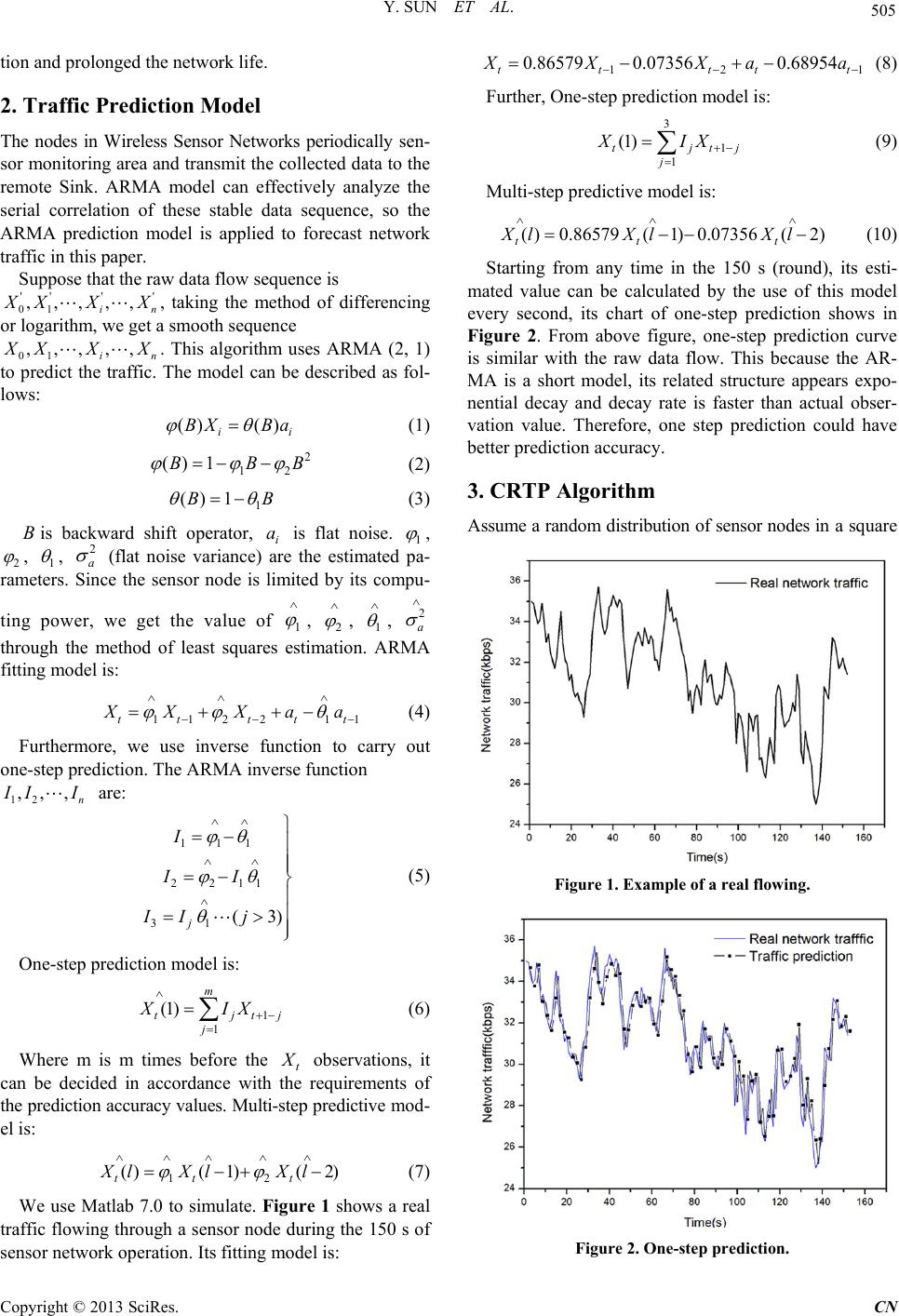
Figure 4. Average residual energy of the network.
that the average residual energy in improved algorithm is
more than EEPB as network running, at the same time
the network energy cost is lower. That’s because we take
a more reasonable method to select the LEADER node in
a chain and take into account the energy balance when
we established routing link, so life cycle of the network
is extended.
5. Conclusion
This paper proposes a chain routing algorithm based on
ARMA traffic prediction for nodes’ premature “death”. It
introduces ARMA prediction model into the LEADER
node reelection in EEPB. Therefore it has not only avoided
LEADER premature “death” because of the used-up energy,
but also avoided the network topology reconstruction as
well as the short life of the death of LEADER. Experi-
mental results show that CRTP has a better performance
than EEPB on balancing energy consumption and pro-
longing lifetime of Wireless Sensor Networks (WSNs).
6. Acknowledgements
The work was supported by National Science and Tech-
nology Major Project of China (No. 2010ZX03006-005-01)
and the Fundamental Research F unds for the Central
Universities (12QX 12).
REFERENCES
[1] X.-L. Zhao, X.-L. Li and K.-Q. Li, “LEACH-Based Pro-
tocol Difference of Cluster-Based Routing Algorithm,”
Computer Engineering and Applications, 2012.
[2] F. Viani, P. Rocca, G. Oliveri, et al., “Localization,
Tracking, and Imaging of Targets in Wireless Sensor
Networks: An Invited Review,” Radio Science, Vol. 46,
No. 5, 2011. http://dx.doi.org/10.1029/2010RS004561
[3] E. E. Emeka and O. F. Abraham, “A Survey of System
Architecture Requirements for Health Care-Based Wire-
less Sensor Networks,” Sensors, Vol. 11, No. 5, 2011, pp.
4875-4898.
[4] L. Fernando, G. Antonio-Javier, G. Felipe, et al., “A
Comprehensive Approach to WSN-Based ITS Applica-
tions: A Survey,” Sensors, Vol. 11, No. 11, 2011, pp.
10220-10265.
[5] A. Cristina, S. Pedro, I. Andrés, et al., “Wireless Sensor
Networks for Oceanographic Monitoring: A Systematic
Review,” Sensors, Vol. 10, No. 7, 2010, pp. 6948-6968.
http://dx.doi.org/10.3390/s100706948
[6] Z.-H. Qian and Y.-J. Wang, “Internet of Things-Oriented
Wireless Sensor Networks Review,” Journal of Electron-
ics & Information Technology, Vol. 35, No. 1, 2013, pp.
215-227.
[7] J.-H. Han, X. Ding, L. Shi, D. Han and Z.-C. Wei, “Re-
search on the Time-Varying Charging and Dyna mic Data
Routing Strategy for Rechargeable Wireless Sensor Net-
works,” Journal on Communications, Vol. 33, No. 12,
2012, pp. 1-10.
[8] Y.-H. Luo, S.-Q. Chen and J.-X. Wang, “The Ener-
gy-Efficient Routing Algorithm in Mobile Ad-Hoc Net-
works,” Engineering and Application of Computer, 2004,
Vol. 36, pp. 15-21.
[9] S Lindsey and C. Raghavendra, “PEGASIS: Power-Effi-
cient Gathering in Sensor Information Systems,” Pro-
ceedings of IEEE Aerospace Conference, Big Sky, Mon-
tana, 2002, pp. 1125-1130.
[10] K.M. Du, J. Wu and D. Zhou, “Chain-Based Protocols for
Data Broadcasting and Gathering in the Sensor Networks,”
Proceedings of Parallel and Distributed Processing
Symposium, Nice, 2003, pp. 1926-1933.
[11] S. L. Hu, Y. Zhang, X. Y. Jin, et al., “Improvement of
PEGASIS Algorithm in Wireless Sensor Networks Using
GA,” Journal of Jiangnan University (Natural Science
Edition), Vol. 7, No. 4, 2008, pp. 0420-0424
[12] L. P. Wang and Z. Cai, “Improved Algorithm of PEGA-
SIS Protocol Introducing Double Cluster Heads in Wire-
less Sensor Network,” 2010 International Conference on
Computer, Mechatronics, Control and Electronic Engi-
neering (CMCE), Changchun, 2010, pp. 148-151.
[13] W.J. Guo, W. Zhang and G. Lu, “PEGASIS Protocol in
Wireless Sensor Network Based on an Improved Ant Co-
lony Algorithm,” The 2nd International Workshop on
Education Technology and Computer Science, Wuhan,
2010.
[14] Zhang Z., Yan L.-S., Pan W., et al., “Routing protocol
based on cluster-head-chaining incorporating LEACH
and PEGASIS,” Chinese Journal of Sensors and Actua-
tors, Vol. 23, No. 8, 2010, pp. 1173-1178.
[15] Y.-C. Yu and G. We i, “An Improved PEGASIS Algo-
rithm in Wireless Sensor Network,” ACTA Electronica
Sinica, Vol. 36, No. 7, 2008, pp. 1309-1313.