A. J. DEROUIN ET AL.
Copyright © 2013 SciRes. JST
69
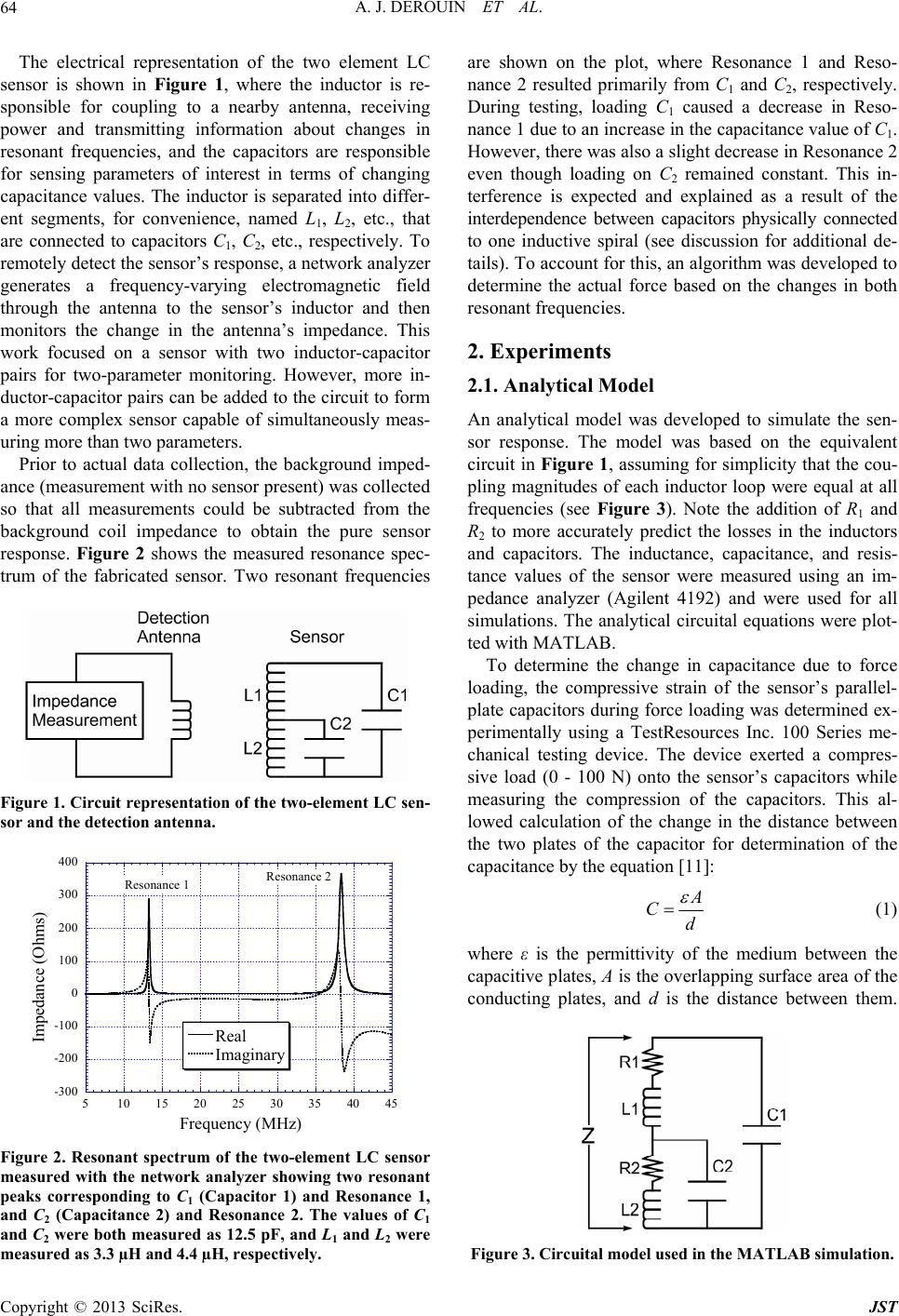
Figure 12. Illustration of the difference between single and
multi element LC sensors when applying for wide area mo-
nitoring. The shaded squares represent the sensing element
and the white squares the inductor. The detec tion points are
represented by arrows.
structures, for example, concrete and wooden beams in
buildings.
This device, with further development, represents an
innovative method of multi-parameter/target sen sing with
a single LC circuit. One potential application that can
highlight the advantage of this sensor compared t
previous LC sensor is as an embedded sensor for pas
monitoring of stresses in a large area, such as under a
roadbed. If the single-element LC sensor is employed,
the user need s to monitor the response at each individual
sensor location, which could be time consuming for road
condition monitoring. However, for the multi-element
sensor design, a number of stress-sensitive capacito
pacitors can be placed at different locations and con-
nected to the inductor via wires as illustrated in Figure
12. As a result, a number of sensors can be md
tem. Additionally, by utilizing in-
o the
sive
r ca-
onitore
simultaneously, which can significantly shorten the mo-
nitoring time.
With further development, the number of elements
could be expanded thus providing for an even more ro-
bust force mapping sys
terdigital capacitors functionalized toward certain che-
micals and environmental parameters, a sensor could
theoretically be developed and deployed for monitoring
multiple parameters such as humidity and volatile com-
pounds. The future works of this system include increas-
ing the number of elements, investigating methods to de-
crease overall sensor size, increasing the detection range,
and adapting the system to monitor other parameters
such as heat, chemical concentrations, moisture, etc.
5. Acknowledgements
The authors would like to acknowledge the National De-
fense Science and Engineering Grant for support of a
graduate studen t fellow working on this project.
REFERENCES
[1] R. A. Potyrailo, T. Wortley, C. Surman, D. Monk, W. G.
Morris, M. Vincent, R. Diana, V. Pizzi, J. Carter, G. Gach,
S. Klensmeden and H. Ehring, “Passive Multivariable
Temperature and Conductivity RFID Sensors for Single-
Use Biopharmaceutical Manufacturing Components,” Bio-
technology Progress, Vol. 27, No. 3, 2011, pp. 875-884.
doi:10.1002/btpr.586
[2] C. A. Grimes. P. Stoyanov, Y. Liu, C. Tong, K. G. Ong,
K. Loiselle, M. Shaw, S. A. Doherty and W. R. Seitz, “A
Magnetostatic-Coupling Based Remote Query Sensor for
Environmental Monitoring,” Journal of Physics D, Vol.
32, No. 12, 1999, pp. 1329-1335.
doi:10.1088/0022-3727/32/12/308
[3] E. L. Tan, W. N. Ng, R. Shao, B. Pereles and K. G. Ong,
or Quantifying Packaged
ol. 7, No. 9, 2007, pp. 1747-
“A Wireless, Passive Sensor f
Food Quality,” Sensors, V
1756. doi:10.3390/s7091747
[4] L. Ruiz-Garcia, L. Lunadei, P. Barreiro and I. Robla, “A
Review of Wireless Sensor Technologies and Applica-
tions in Agriculture and Food Industry: State of the Art
and Current Trends,” Sensors, Vol. 9, No. 6, 2009, pp.
4728-4750. doi:10.3390/s90604728
, M. Radovanovic, M. M[5] G. Stojanovicalesev and V. Ra-
donjanin, “Monitoring of Water Content in Building Ma-
terials Using a Wireless Passive Sensor,” Sensors, Vol. 10,
No. 5, 2010, pp. 4270-4280. doi:10.3390/s100504270
[6] C. A. Grimes, D. Kouzoudis, K. G. Ong and R. Crump,
“Thin-Film Magnetoelastic Micro Sensors for Remote
Query Biomedical Monitoring,” Biomedical Microdevices,
Vol. 2, No. 1, 2000, pp. 51-60.
doi:10.1023/A:1009907316867
[7] L. Reindl, G. Scholl, T. Ostertag, C. C. W. Ruppel, W.-E.
Bulst and F. Seifert, “SAW Devices as Wireless Passive
Sensors,” Proceedings of Ultrasonics Symposium, San
Antonio, 3-6 November 1996, pp. 363-367.
[8] C. A. Grimes, C. S. Mungle, K. Zeng, M. K. Jain, W. R.
Dreschel, M. Paulose and K. G. Ong, “Wireless Magne-
toelastic Resonance Sensors: A Critical Review,” Sensors,
Vol. 2, No. 7, 2002, pp. 294-313. doi:10.3390/s20700294
[9] J. C. Butler, A. J. Vigliotti, F. W. Verdi and S. M. Walsh,
“Wireless, Passive Resonant Circuit, Inductively Coupled,
Inductive Strain Sensor,” Sensors and Actuators A, Vol.
102, No. 1-2, 2002, pp. 61-66.
doi:10.1016/S0924-4247(02)00342-4
[10] K. G. Ong, C. A. Grimes, C. L. Robbins and R. S. Singh,
“Design and Application of a Wireless, Passive, Resonant
Circuit Environmental Monitoring Sensor,” Sensors and
Actuators A, Vol. 93, No. 1, 2001, pp. 33-43.
doi:10.1016/S0924-4247(01)00624-0
[11] D. Corson and P Lorrain, “Introduction to Electromag-
netic Fields and Waves,” W. H. Freeman and Company,
New York, 1962, pp. 58-64.