S. H. LUO ET AL.
Copyright © 2013 SciRes. ENG
72
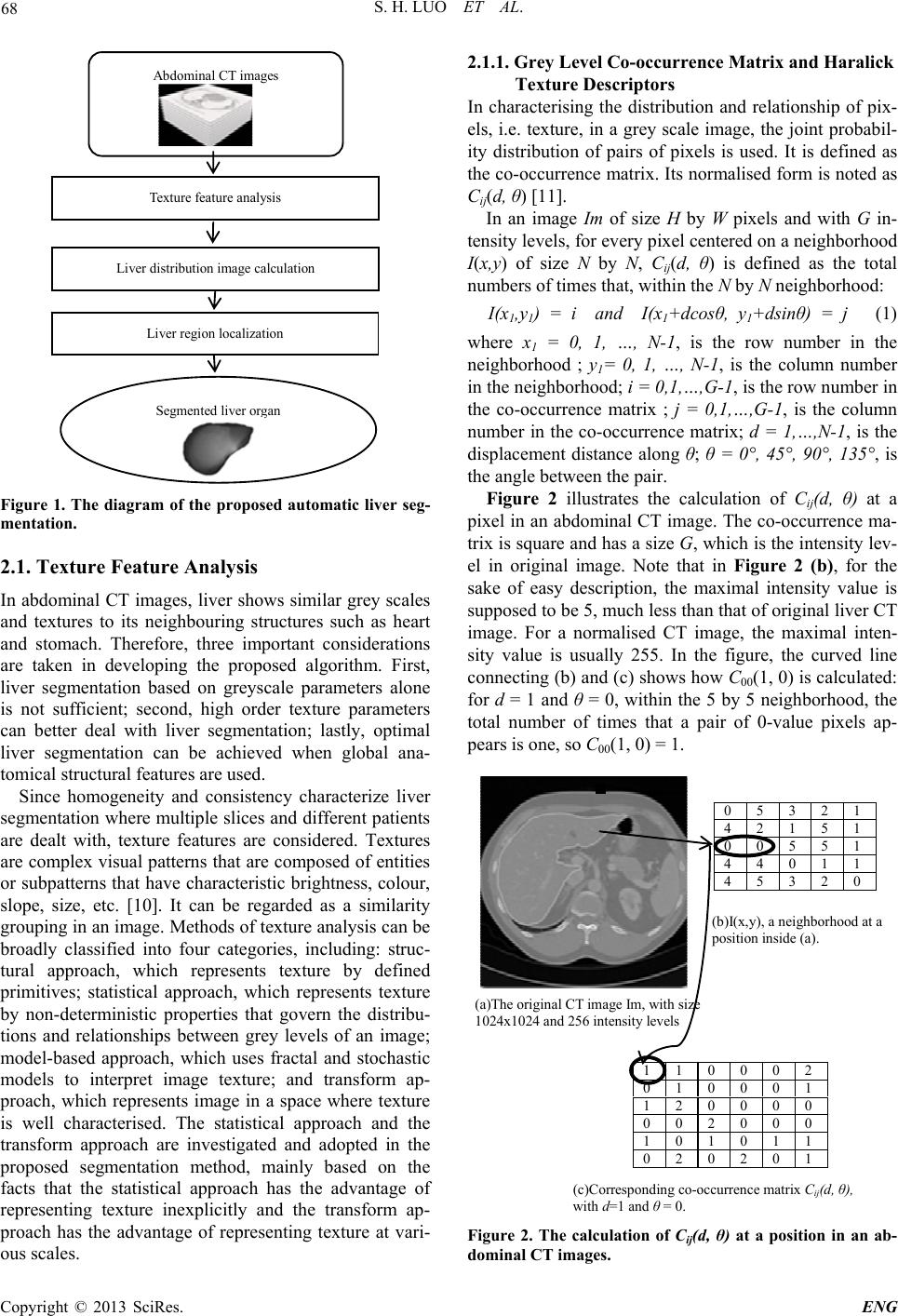
Table 1. Performance metrics (%) of the two experiments.
FPVF FNVF TPVF
Experiment 1 14.7 6.3 93.8
Experiment 2 11.1 5.1 97.3
statistical texture features only are used. The perform-
ance improvement is across all the metrics, with about
four percent improvement on TPVF.
4. Conclusions
This paper presents an accurate liver segmentation algo-
rithm. The main focus of the discussion is how to im-
prove segmentation performance by selecting most suit-
able image features. There are three major steps in the
proposed method, including texture analysis which re-
sults in a suitable set of texture features, calculation of
liver distribution image using support vector machines,
and accurate liver organ localization using a group of
morphological operations to locate the liver organ. The
novelty of the approach is resided in the fact that the
features are so selected that both local and global texture
distributions are considered. Out of detailed methodology
description and segmentation experiments, it has shown
that the proposed method can accurately segment liver in
CT image, achieving as high as 97.3% on true positive
volume fraction.
REFERENCES
[1] A. M. Mharib, A. R. Ramli, S. Mashohor and R. B. Mah-
mood, “Survey on liver CT image segmentation methods”,
Artificial Intelligence Review, Vol. 37, No. 2, 2012, pp.
83-95. doi:10.1007/s10462-011-9220-3
[2] H. Bourquain, et al., “Hepavision2—A Software Assis-
tant for Preoperative Planning in Living Related Liver
Transplantation and Oncologic Liver Surgery,” Computer
Assisted Radiology&Surgery, 2002, pp. 341-346.
[3] H. P. Meinzer, M. Thorn and C. Cardenas, “Computer-
ized Planning of Liver Surgery: An Overview,” Com-
puters and Graphics, Vol. 26, No. 4, 2002, pp. 569-576.
[4] P. Campadelli, E. Casiraghi and A. Esposito, “Liver Seg-
mentation from Computed Tomography Scans: A Survey
and a New Algorithm,” Artificial Intelligence in Medicine,
Vol. 45, No. 2-3, 2009, pp. 185-196.
doi:10.1016/j.artmed.2008.07.020
[5] S. Luo, Q. Hu, X. He, J. Li, S. J. Jin, S. Chalup and M.
Park, “Automatic Liver Parenchyma Segmentation from
Abdominal CT Images Using Support Vector Machines,”
2009 IEEE/CME Int. Conf on Complex Medical Engi-
neering, April 9-11, 2009, Tempe, USA, paper 10071.
[6] V. Pamulapati, A. Venkatesan, B. J. Wood and M. G.
Linguraru, “Liver Segmental Anatomy and Analysis from
Vessel and Tumor Segmentation via Optimized Graph
Cuts,” MICCAI'11 Proceedings of the Third international
conference on Abdominal Imaging: Computational and
Clinical Applications, 2011, pp. 189-197.
[7] T. Dima and J. Domingo, “A Local Level Set Method for
Liver Segmentation in Functional MR Imaging,” IEEE
Nuclear Science Symposium Conference Record, 2011, pp.
3158-3161.
[8] J. Lu, L. Shi, M. Deng, S. C. H. Yu and P. A. Heng, “An
Interactive Approach to Liver Segmentation in CT Based
on Deformable Model Integrated with Attractor Force,”
Machine Learning and Cybernetics (ICMLC) 2011, pp.
1660-1665.
[9] Y. Zhao, Y. Zan, X. Wang and G. Li, “Fuzzy C-means
Clustering-Based Multilayer Perceptron Neural Network
for Liver CT Images Automatic Segmentation,” Control
and Decision Conference (CCDC) 2010, pp. 3423-3427.
[10] A. Materka and M. Strzelecki, “Texture Analysis Meth-
ods - a Review,” Technical Report, Technical University
of Lodz, Institute of Electronics, 1998.
[11] R. M. Haralick, “Statistical and Structural Approaches to
Texture,” Proceedings of the IEEE, Vol. 67, No. 5, 1979,
786-804. doi:10.1109/PROC.1979.11328
[12] S. Mallat, “Multifrequency Channel Decomposition of
Images and Wavelet Models”, IEEE Trans. Acoustic,
Speech and Signal Processing, Vol. 37, No. 12, 1989, pp.
2091-2110.
[13] A. Rosenfeld and J. Weszka, “Picture Recognition in
Digital Pattern Recognition,”K. Fu (Ed.), Springer-Verlag,
1980, pp. 135-166.
doi:10.1007/978-3-642-67740-3_5
[14] J. Daugman, “Uncertainty Relation for Resolution in
Space, Spatial Frequency and Orientation Optimised by
Two-Dimensional Visual Cortical Filters,” Journal of the
Optical Society of America, Vol. 2, 1985, pp. 1160-1169.
doi;10.1364/JOSAA.2.001160
[15] N. Cristianini and J. Shawe-Taylor, “An Introduction to
Support Vector Machines and Other Kernel-based Learn-
ing Methods,” Cambridge University Press, ISBN
0521780195, 2000. doi:10.1017/CBO9780511801389
[16] J. Serra, “Image Analysis and Mathematical Morphol-
ogy,” Theoretical Advances, New York: Academic, Vol.
2, 1998.
[17] T. Heimann, M. Styner and B. van Ginneken, “3D Seg-
mentation in the Clinic: A Grand Challenge,” MICCAI
2007, the 10th Intel Conf. on Medical Image Computing
and Computer Assisted Intervention, 29 Oct. to 2 Nov.
2007, Brisbane, Australia, pp. 7-15