 Journal of Transportation Technologies, 2013, 3, 204-213 http://dx.doi.org/10.4236/jtts.2013.33021 Published Online July 2013 (http://www.scirp.org/journal/jtts) Contribution to the Investigation of Motorcyclists’ Speed Prediction Equations for Two-Lane Rural Roads Panagiotis V. Lemonakis1, Nikolaos E. Eliou1, George N. Botzoris2, Theodoros E. Karakasidis1 1Department of Civil Engineering, Section of Transportation, University of Thessaly, Volos, Greece 2Department of Civil Engineering, Section of Transportation, Democritus Thrace University, Xanthi, Greece Email: plemonak@gmail.com, neliou@civ.uth.gr, gbotzori@civil.duth.gr, thkarak@civ.uth.gr Received March 21, 2013; revised April 22, 2013; accepted April 30, 2013 Copyright © 2013 Panagiotis V. Lemonakis et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT The calculation of speed prediction equations has been the subject of numerous researches in the past. The majority of them present models to predict free-flow speed in terms of the road geometry at the curved road sections and more spe- cifically in terms of the radiuses of the curves. Common characteristic is that none of them approaches the speed be- havior of motorcycles since they are excluded from the datasets of the various studies. Instead, the models usually pre- dict operating speed for other vehicle types such as passenger cars, vans, pickups and trucks. The present paper aims to cover this gap by developing speed prediction equations for motorcycles. For this purpose a new methodology is pro- posed while field measurements were carried out in order to obtain an adequate dataset of free-flow speeds along the curved sections of three different two lane rural roads. The aforementioned field measurements were conducted by two participants incorporating various road conditions (e.g. light conditions, experience level, familiarity with the routes). The ultimate target was the development of speed prediction equations by calculating the optimum regression curves between the curve radius’ and the corresponding velocities for the different road conditions. The research revealed that the proposed methodology could be used as a very useful tool to investigate motorcyclists’ behavior at curved road sec- tions. Moreover it was feasible to draw conclusions correlating the speed adjustment with the various driving condi- tions. Keywords: Motorcyclists’ Behavior; Regression Curves; Curvature; Free-Flow Speed; Speed Equations; Field Measurements 1. Introduction Numerous studies have been carried out during the last decades in the field of road safety in order to predict the relationship between driver behavior and road features (especially on horizontal curves). Many of these studies focus on creating analytical models expressing driver behavior in relation to the characteristics of the roads [1-7]. In these models, driver behavior is expressed by the operating speed (V85, that represents the 85th-percen- tile speed), while the road characteristics are generally represented by the curvature change rate of the single curve or the horizontal curve radius, since it has been estimated that the magnitude of the radius of the hori- zontal curves is the most considerable factor that deter- mines operational speed [8]. Nevertheless, the true effect of each individual geometric variable (e.g. curve radius, length of the curve, deflection angle and superelevation) is still not known precisely in quantitative terms [9]. As stated in a recent study [10], most models devel- oped to date focus on passenger car speeds. However, the speed behavior of motorcycles was studied by [11], evaluated the possibility to develop a motorcycle operat- ing speed prediction model analyzing the relationships between the motorcycle operating speed and the passen- ger cars operating speed. Both motorcycle and vehicle speeds were collected using a Light Detection and Rang- ing (Lidar) gun while graphic as well as statistical analy- sis followed the measurements. The outcome of this re- search was the development of the Equation (1): 2 85 85 1.162, 0.94 PTW PC VVR (1) where V85PTW: the 85th percentile speed on tangent of power- two-wheelers (km/h), V85PC: the 85th percentile speed on tangent of passen- ger cars (km/h), R2: the coefficient of determination. C opyright © 2013 SciRes. JTTs  P. V. LEMONAKIS ET AL. 205 The objective in another study by [12] is to develop a speed prediction equation on horizontal curves using the geometric characteristics of the curves at 11 sites in ex- clusive motorcycle lane. To achieve this objective, the speeds of motorcyclists were measured in exclusive mo- torcycle lanes in Malaysia using two devices; a portable laser speed detector and a digital video camera. The au- thors of this study using linear regression procedure, in order to identify the best fit combinations of the inde- pendent variables, developed the following Equation (2): 85,curve 19.3570.394 0.654VWT (2) where V85,curve: the 85th percentile motorcycle speed on hori- zontal curves, W: the total lane width, Δ: deflection angle, T: the length of tangent. No other study relevant to motorcycle speed prediction equations has been carried out apart from the two afore-mentioned ones, at least to our knowledge. There- fore the impact of the different light conditions, the dif- ferent experience level, the familiarity with the road and the different road environment to drivers’ behavior ex- pressed in operating speed changes can only be observed in passenger cars studies. The investigation of motorcyclists’ speed prediction equations at the present study has been achieved by pro- posing a new methodology of measuring speeds based on GPS technology which preceded the conduction of field measurements in order to in order to obtain an adequate dataset of free-flow speeds. The field measurements were designed taking into account various factors that poten- tially influence the riders’ behavior such as the different light conditions, the difference on the riding experience level, the familiarity of the riders with the routes, the presence of pillion and the different road environments, such as width/condition of the road pavement, roadside land use, etc. 2. Experimental Design of the Field Measurements 2.1. Participants Initially, three basic parameters had to be defined with regards to the participants’ selection that would execute the field measurements; demographic criteria, riding ex- perience and psychometric aspects of the riders [13]. The choice of the participants’ gender was based on preceding researches which have shown that males are over-represented both in car and motorcycle accidents [14,15], but also in the riding population even though they do not necessarily demonstrate riskier behaviors. Moreover, males constitute the typical rider gender and they can be recruited easier than the female ones. Experience is also a significant factor that determines the level of risk taking behavior among riders. In most of the cases, there is a correlation between riding experience and age, since young riders are more inexperienced in comparison to the older ones who are more experienced. In order to reduce the probability of accident occurrence during the experiment, young and older riders were ex- cluded, due to their high risk rates. Consequently, all participants had to have an actual riding experience of at least 5 years and should not be older than 50 years old. Aiming also to the latter target, the sample of riders was biased towards riders with limited accident records. Fur- thermore, since one of the main objectives of the present research was to determine how the riding experience affects riding behavior, efforts were made in order to match the overall participants’ features apart from their riding experience, which was selected to be considerably different. Another issue that had to be dealt with was that the riders had to achieve a certain level of familiarity with the instrumented motorcycle. For that reason, prior to the execution of the field measurements, the riders were asked to ride the experimental motorcycle until they felt confident with its operation. It should also be noted that the demands for adequate handling were relatively in- creased due to the size and weight of the instrumented motorcycle. Taking under consideration the afore-mentioned, two male riders belonging at the same age group were se- lected to carry out the field measurements. None of them revealed any obvious reason of impaired riding ability while their riding experience levels were totally different. Moreover, they had common stay of residence, adjacent to the routes where the experiment was conducted and therefore, they both had similar familiarity with the ex- perimental environment. 2.2. Instrumented Vehicle and Record Devices Many researchers have obtained speed data, using in most cases, a radar gun [16,17] as well as speed detectors [12]. Both methods can introduce errors such as measur- ing errors or can influence drivers’ behavior who might perceive the speed record equipment and hence, adjust their speeds to the legal speed limits of the sections stud- ied [10]. Therefore in order to overcome the shortcom- ings of the speed recording equipment that has been used so far we established a new speed record method which was based on the usage of GPS data logger. Data loggers can record GPS, video and vehicle data and are ideally suited to motorsport due to their small weight, size and increased accuracy. Moreover without fitting any other sensors, the measure of speed, track po- Copyright © 2013 SciRes. JTTs 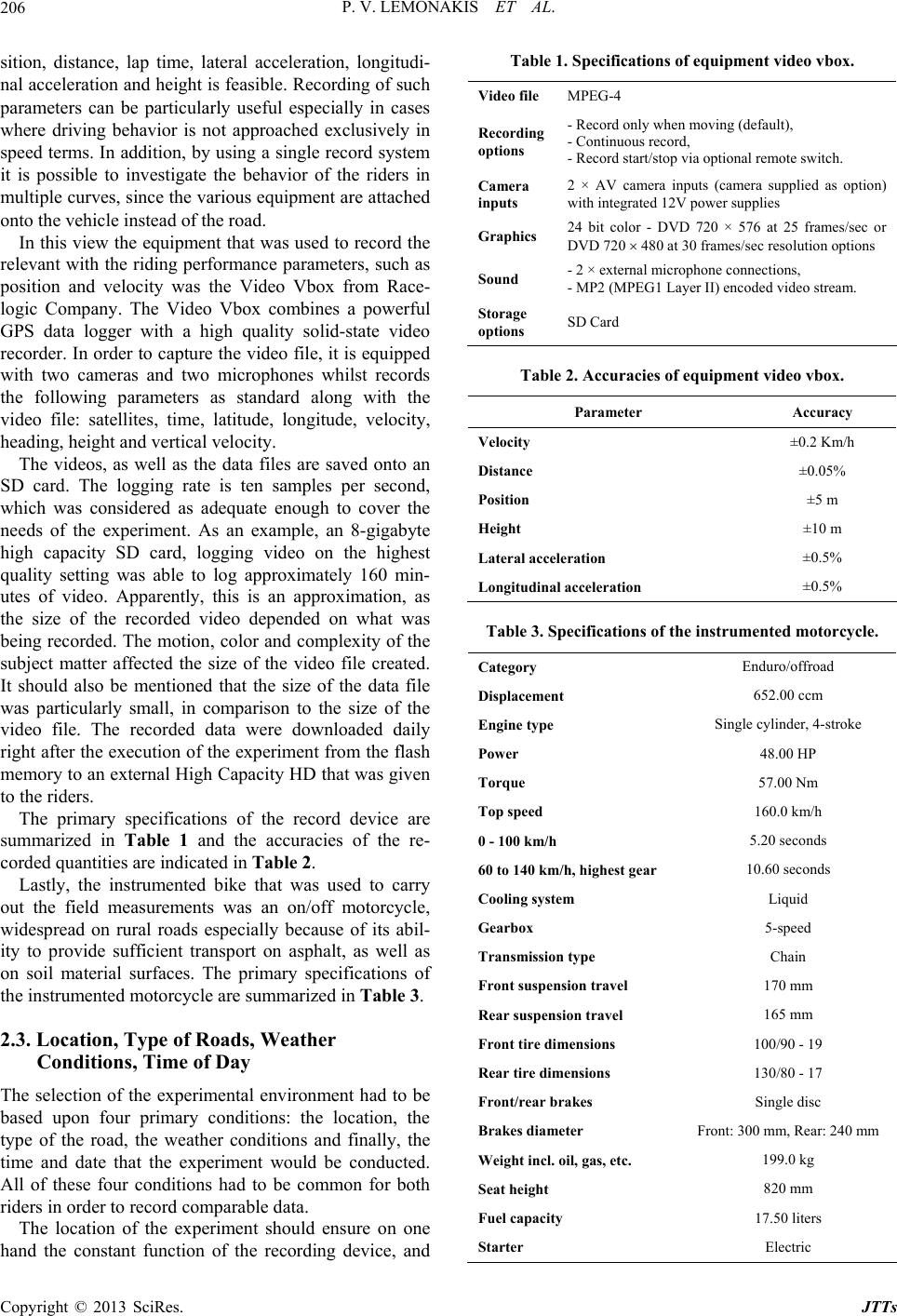 P. V. LEMONAKIS ET AL. 206 sition, distance, lap time, lateral acceleration, longitudi- nal acceleration and height is feasible. Recording of such parameters can be particularly useful especially in cases where driving behavior is not approached exclusively in speed terms. In addition, by using a single record system it is possible to investigate the behavior of the riders in multiple curves, since the various equipment are attached onto the vehicle instead of the road. In this view the equipment that was used to record the relevant with the riding performance parameters, such as position and velocity was the Video Vbox from Race- logic Company. The Video Vbox combines a powerful GPS data logger with a high quality solid-state video recorder. In order to capture the video file, it is equipped with two cameras and two microphones whilst records the following parameters as standard along with the video file: satellites, time, latitude, longitude, velocity, heading, height and vertical velocity. The videos, as well as the data files are saved onto an SD card. The logging rate is ten samples per second, which was considered as adequate enough to cover the needs of the experiment. As an example, an 8-gigabyte high capacity SD card, logging video on the highest quality setting was able to log approximately 160 min- utes of video. Apparently, this is an approximation, as the size of the recorded video depended on what was being recorded. The motion, color and complexity of the subject matter affected the size of the video file created. It should also be mentioned that the size of the data file was particularly small, in comparison to the size of the video file. The recorded data were downloaded daily right after the execution of the experiment from the flash memory to an external High Capacity HD that was given to the riders. The primary specifications of the record device are summarized in Table 1 and the accuracies of the re- corded quantities are indicated in Table 2. Lastly, the instrumented bike that was used to carry out the field measurements was an on/off motorcycle, widespread on rural roads especially because of its abil- ity to provide sufficient transport on asphalt, as well as on soil material surfaces. The primary specifications of the instrumented motorcycle are summarized in Table 3. 2.3. Location, Type of Roads, Weather Conditions, Time of Day The selection of the experimental environment had to be based upon four primary conditions: the location, the type of the road, the weather conditions and finally, the time and date that the experiment would be conducted. All of these four conditions had to be common for both riders in order to record comparable data. The location of the experiment should ensure on one hand the constant function of the recording device, and Table 1. Specifications of equipment video vbox. Video file MPEG-4 Recording options - Record only when moving (default), - Continuous record, - Record start/stop via optional remote switch. Camera inputs 2 × AV camera inputs (camera supplied as option) with integrated 12V power supplies Graphics 24 bit color - DVD 720 × 576 at 25 frames/sec or DVD 720 480 at 30 frames/sec resolution options Sound - 2 × external microphone connections, - MP2 (MPEG1 Layer II) encoded video stream. Storage options SD Card Table 2. Accuracies of equipment video vbox. Parameter Accuracy Velocity ±0.2 Km/h Distance ±0.05% Position ±5 m Height ±10 m Lateral acceleration ±0.5% Longitudinal acceleration ±0.5% Table 3. Specifications of the instrumented motorcycle. Category Enduro/offroad Displacement 652.00 ccm Engine type Single cylinder, 4-stroke Power 48.00 HP Torque 57.00 Nm Top speed 160.0 km/h 0 - 100 km/h 5.20 seconds 60 to 140 km/h, highest gear 10.60 seconds Cooling system Liquid Gearbox 5-speed Transmission type Chain Front suspension travel 170 mm Rear suspension travel 165 mm Front tire dimensions 100/90 - 19 Rear tire dimensions 130/80 - 17 Front/rear brakes Single disc Brakes diameter Front: 300 mm, Rear: 240 mm Weight incl. oil, gas, etc. 199.0 kg Seat height 820 mm Fuel capacity 17.50 liters Starter Electric Copyright © 2013 SciRes. JTTs 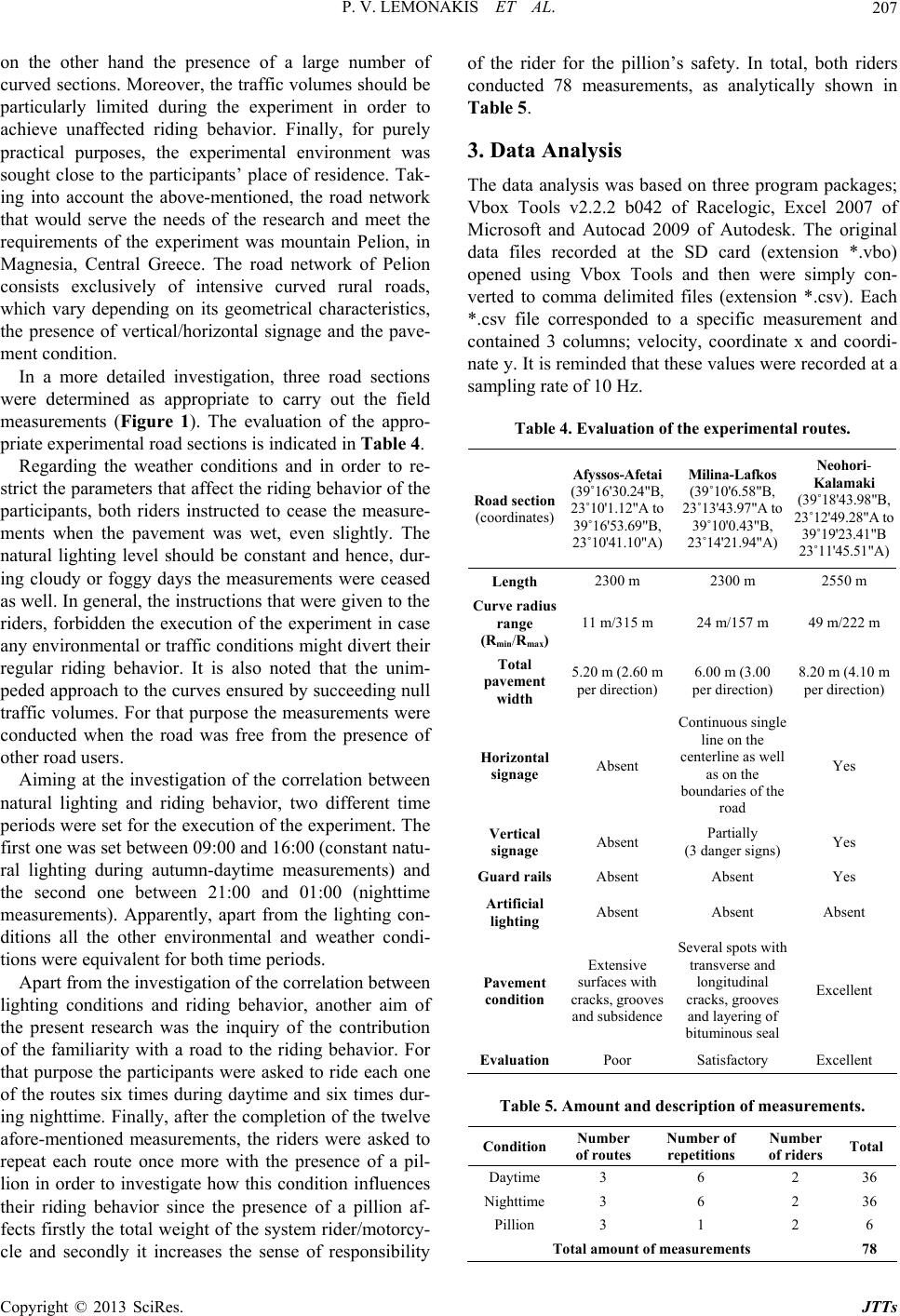 P. V. LEMONAKIS ET AL. 207 on the other hand the presence of a large number of curved sections. Moreover, the traffic volumes should be particularly limited during the experiment in order to achieve unaffected riding behavior. Finally, for purely practical purposes, the experimental environment was sought close to the participants’ place of residence. Tak- ing into account the above-mentioned, the road network that would serve the needs of the research and meet the requirements of the experiment was mountain Pelion, in Magnesia, Central Greece. The road network of Pelion consists exclusively of intensive curved rural roads, which vary depending on its geometrical characteristics, the presence of vertical/horizontal signage and the pave- ment condition. In a more detailed investigation, three road sections were determined as appropriate to carry out the field measurements (Figure 1). The evaluation of the appro- priate experimental road sections is indicated in Table 4. Regarding the weather conditions and in order to re- strict the parameters that affect the riding behavior of the participants, both riders instructed to cease the measure- ments when the pavement was wet, even slightly. The natural lighting level should be constant and hence, dur- ing cloudy or foggy days the measurements were ceased as well. In general, the instructions that were given to the riders, forbidden the execution of the experiment in case any environmental or traffic conditions might divert their regular riding behavior. It is also noted that the unim- peded approach to the curves ensured by succeeding null traffic volumes. For that purpose the measurements were conducted when the road was free from the presence of other road users. Aiming at the investigation of the correlation between natural lighting and riding behavior, two different time periods were set for the execution of the experiment. The first one was set between 09:00 and 16:00 (constant natu- ral lighting during autumn-daytime measurements) and the second one between 21:00 and 01:00 (nighttime measurements). Apparently, apart from the lighting con- ditions all the other environmental and weather condi- tions were equivalent for both time periods. Apart from the investigation of the correlation between lighting conditions and riding behavior, another aim of the present research was the inquiry of the contribution of the familiarity with a road to the riding behavior. For that purpose the participants were asked to ride each one of the routes six times during daytime and six times dur- ing nighttime. Finally, after the completion of the twelve afore-mentioned measurements, the riders were asked to repeat each route once more with the presence of a pil- lion in order to investigate how this condition influences their riding behavior since the presence of a pillion af- fects firstly the total weight of the system rider/motorcy- cle and secondly it increases the sense of responsibility of the rider for the pillion’s safety. In total, both riders conducted 78 measurements, as analytically shown in Table 5. 3. Data Analysis The data analysis was based on three program packages; Vbox Tools v2.2.2 b042 of Racelogic, Excel 2007 of Microsoft and Autocad 2009 of Autodesk. The original data files recorded at the SD card (extension *.vbo) opened using Vbox Tools and then were simply con- verted to comma delimited files (extension *.csv). Each *.csv file corresponded to a specific measurement and contained 3 columns; velocity, coordinate x and coordi- nate y. It is reminded that these values were recorded at a sampling rate of 10 Hz. Table 4. Evaluation of the experimental routes. Road section (coordinates) Afyssos-Afeta i (39˚16'30.24"Β, 23˚10'1.12"Α to 39˚16'53.69"Β, 23˚10'41.10"Α) Milina-Lafkos (39˚10'6.58"Β, 23˚13'43.97"Α to 39˚10'0.43"Β, 23˚14'21.94"Α) Neohori- Kalama ki (39˚18'43.98"Β, 23˚12'49.28"Αto 39˚19'23.41"Β 23˚11'45.51"Α) Length 2300 m 2300 m 2550 m Curve radius range (Rmin /Rmax )11 m/315 m 24 m/157 m 49 m/222 m Total pavement width 5.20 m (2.60 m per direction) 6.00 m (3.00 per direction) 8.20 m (4.10 m per direction) Horizontal signage Absent Continuous single line on the centerline as well as on the boundaries of the road Yes Vertical signage Absent Partially (3 danger signs) Yes Guard railsAbsent Absent Yes Artificial lighting Absent Absent Absent Pavement condition Extensive surfaces with cracks, grooves and subsidence Several spots with transverse and longitudinal cracks, grooves and layering of bituminous seal Excellent Evaluation Poor Satisfactory Excellent Table 5. Amount and description of measur eme nts. Condition Number of routesNumber of repetitions Number of ridersTotal Daytime 3 6 2 36 Nighttime 3 6 2 36 Pillion 3 1 2 6 Total amount of measurements 78 Copyright © 2013 SciRes. JTTs  P. V. LEMONAKIS ET AL. 208 K14, R=11m K20, R=21m K19, R=16m K15, R=18m K16, R=76m K17, R=65m K18, R=23m K7, R=315m K1, R=26m K2, R=124m K3, R=62m K8, R=246m K10, R=143m K13, R=65m K4, R=55m K5, R=25m K6, R=157m K12, R=209m K11, R=71m K9, R=88m Afyssos Afetai K1, R=73m K2, R=37m K3, R=24m K4, R=36m K9, R=40m K15, R=42m K16, R=157m K17, R=80m K18, R=91m K19, R=134m K20, R=143m K14, R=61m K13, R=139m K12, R=55m K11, R=140m K5, R=35m K6, R=97m K7, R=109m K8, R=124m K10, R=61m Lafkos Milina K1, R=77m K2, R=202m K3, R=136m K4, R=222m K10, R=203m K9, R=141m K8, R=135m K7, R=49m K6, R=78m K5, R=133m Neoxori Kalamaki Figure 1. Experimental road sections. Since coordinates x and y were known the design of the trajectory of each measurement was feasible in Auto- cad using the appropriate lisp (functional language). Moreover, a number was assigned in each pair of x and y coordinates in ascending order, starting from number 1 for the first recording. Apparently, the last number varies among the measurements since it derives from the total time that each measurement completed. Apart from the design of the trajectory of each meas- urement, it was also drawn a representative rendering of the line of each route and its geometrical characteristics and especially the edge of the traveled way (reference arc) that none of the riders encroached in each curve. The radius that refers to each reference arc was then used to the analysis that followed. Hence the results and conclu- sions of the present research were not based upon the geometrical radius of the curves and thus cannot be used as evaluation criteria of design consistency. The knowledge of the beginning and end of each curve (different numbers for each measurement as implied be- low) led to the determination of the beginning and end number for each curve and measurement. Thereafter by simply averaging the velocities within the beginning and end number we calculated the mean velocity (apparently for each curve and measurement). It is noted that the ve- locity of each measurement at the beginning and end of each curve was calculated with linear regression of the values right before and right after the curve implying that the trajectory and hence the variation of the velocity be- tween two consecutive points, is linear. By this means the calculation of the mean velocities in each curve for each one of the 78 different measurements was possible. More specifically, 50 curves were deter- mined for further analysis; 20 curves located at route Afyssos-Afetai (9 curves were right hand while 14 curves had radius R < 100 m), 20 curves located at route Milina-Lafkos (10 curves right hand, 13 curves with ra- dius R < 100 m) and 10 curves located at route Neo- hori-Kalamaki (6 curves right hand, 3 curves with radius R < 100 m). The next step of the data processing method was to determine the method to calculate the equations that cor- relate the recorded velocities with the corresponding ra- diuses of the horizontal curves as defined above. Previ- ous research has shown that linear regression can be used to predict operating speeds on circular curves. The results of researches as discussed in a study conducted by [18] showed that the 85th percentile speeds on horizontal curves (the dependent variable) can be predicted using combinations of independent variables such as curve radius, length of the curve, deflection angle, and su- perelevation. Apart from the afore-mentioned studies, it was evident that the ordinary least square (OLS) regres- sion was the most widespread model type among the various researchers that has been used in order to develop comprehensive speed prediction equations/models and for that reason it was selected against other model types [10]. 4. Results The calculation of the mean velocities followed by the implementation of the ordinary least square regression method in order to determine the optimum regression curve between radius and velocity that fitted better the Copyright © 2013 SciRes. JTTs  P. V. LEMONAKIS ET AL. 209 distribution of the collected data. The outcome for the various driving conditions is presented in Table 6. Based on the results of Table 6, Figures 2 to 20 were generated, a thorough examination of which led to vari- ous conclusions correlating the riders’ speed adjustment with the radiuses of the curves. As it is shown in Figures 2 to 13, the impact of the light conditions and the familiarity of the riders with the routes is important. More specifically both riders tend to speed more during daytime instead of nighttime while the greatest velocities are recorded when the riders be- come familiar with the routes. Furthermore they speed more when the road conditions improve, according to the evaluation of Table 4 (Figures 17 to 20). Moreover the mean velocity of the experienced rider at the repetitions with the presence of the pillion is consid- erably higher than the corresponding velocity of the in- experienced rider and hence, it is implied that the ex- perienced rider perceives more efficiently the benefit of the increased weight of the system motorcycle-rider- pillion which is accompanied by the increase of the side friction and therefore it permits higher speeds. This is clearly reflected in Figures 14 to 16 which compare the mean speeds of the experienced and the inexperienced rider for the various routes. 5. Conclusions In the present paper we introduce a new methodology aiming to develop speed prediction equations for motor- cycles. For that purpose two motorcyclists recruited who rode an instrumented bike in three different rural road sections under different driving conditions (i.e. presence of pillion, different light conditions). The ultimate target was the determination of the optimum regression curve between the curve radius’ and the corresponding veloci- ties which accomplished with the implementation of the ordinary least square method. Within the limitations of the experiment (sites, parti- cipants, type of motorcycle) the conclusions drawn from the analysis of the recorded data, are presented below: In all routes driven by the two riders (apart from the route Afyssos-Afetai driven by the inexperienced rider during nighttime as shown in Figure 2), the greatest velocities are recorded during the daytime in- stead of nighttime repetitions (Figures 3 to 7). In all routes driven by the riders, both during daytime and nighttime (apart from the route Afyssos-Afetai driven by the inexperienced rider during daytime as shown in Figure 8), the greatest velocities are re- corded when the riders become familiar with the routes (Figures 9 to 13). This arises from the com- parison of the average velocities of the first three repetitions with the last three ones. Table 6. Equations and coefficients of de te r mination of OLS (ordinary Least Square) method. Route and riding conditions Equation V = α·Rb R2 A-A (poor), IXP, DL, avg. of repetitions 1 to 6 V = 8.7395·R0.3221 0.95 A-A (poor), IXP, NL, avg. of repetitions 1 to 6 V = 8.8669·R0.3582 0.97 M-L (satisfactory), IXP, DL, avg. of repetitions 1 to 6 V = 12.888·R0.3183 0.89 M-L (satisfactory), IXP, NL, avg. of repetitions 1 to 6 V = 11.277·R0.3163 0.93 N-K (excellent), IXP, DL, avg. of repetitions 1 to 6 V = 15.499·R0.3017 0.91 N-K (excellent), IXP, NL, avg. of repetitions 1 to 6 V = 14.044·R0.2922 0.90 A-A (poor), EXP, DL, avg. of repetitions 1 to 6 V = 8.4390·R0.3628 0.95 A-A (poor), EXP, NL, avg. of repetitions 1 to 6 V = 9.2203·R0.3231 0.94 M-L (satisfactory), EXP, DL, avg. of repetitions 1 to 6 V = 12.550·R0.3189 0.88 M-L (satisfactory), EXP, NL, avg. of repetitions 1 to 6 V = 12.568·R0.3082 0.92 N-K (excellent), EXP, DL, avg. of repetitions 1 to 6 V = 14.177·R0.3132 0.88 N-K (excellent), EXP, NL, avg. of repetitions 1 to 6 V = 13.187·R0.3055 0.80 A-A (poor), IXP, DL & NL, avg. of repetitions 1 to 3 V = 8.6965·R0.3609 0.96 A-A (poor), IXP, DL & NL, avg. of repetitions 4 to 6 V = 8.9161·R0.3505 0.95 M-L (satisfactory), IXP, DL & NL, avg. of repetitions 1 to 3 V = 11.123·R0.3323 0.77 M-L (satisfactory), IXP, DL & NL, avg. of repetitions 4 to 6 V = 12.975·R0.3027 0.81 N-K (excellent), IXP, DL & NL, avg. of repetitions 1 to 3 V = 15.404·R0.2849 0.75 N-K (excellent), IXP, DL & NL, avg. of repetitions 4 to 6 V = 14.154·R0.3085 0.69 A-A (poor), EXP, DL & NL, avg. of repetitions 1 to 3 V = 9.9442·R0.3362 0.92 A-A (poor), EXP, DL & NL, avg. of repetitions 4 to 6 V = 8.7015·R0.3484 0.93 M-L (satisfactory), EXP, DL & NL, avg. of repetitions 1 to 3 V = 12.799·R0.3004 0.85 M-L (satisfactory), EXP, DL & NL, avg. of repetitions 4 to 6 V = 12.360·R0.3255 0.88 N-K (excellent), EXP, DL & NL, avg. of repetitions 1 to 3 V = 14.172·R0.2997 0.74 N-K (excellent), EXP, DL & NL, avg. of repetitions 4 to 6 V = 13.195·R0.3189 0.75 A-A (poor), IXP, Pillion V = 8.5988·R0.3217 0.91 A-A (poor), EXP, Pillion V = 8.6167·R0.3826 0.95 M-L (satisfactory), IXP, Pillion V = 13.210·R0.2712 0.78 M-L (satisfactory), EXP, Pillion V = 13.374·R0.2861 0.76 N-K (excellent), IXP, Pillion V = 16.497·R0.2684 0.82 N-K (excellent), EXP, Pillion V = 15.262·R0.3107 0.80 A-A: Afyssos-Afetai, M-L: Milina-Lafkos, N-K: Neohori-Kalamaki, INX: inexperienced rider, EXP: experienced rider, DL: daylight, NL: nightlight, avg.: average. Copyright © 2013 SciRes. JTTs  P. V. LEMONAKIS ET AL. 210 50150 250 3500100 200 300 400 10 30 50 70 20 40 60 Inexperienced rider - Day Inexperienced rider - Night Velocity V (km/h) Curve radius R (m) V=8.8669 R R = 0.97 0.3582 2 V=8.7395 R R = 0.95 0.3221 2 . . Figure 2. Velocity in relation to curve radius in the route Afyssos-Afetai (poor quality)—Inexperienced rider. 2575125 175050100 150 200 10 30 50 70 0 20 40 60 Inexperienced rider - Day Inexperienced rider - Night Velocity V (km/h) Curve radius R (m) V=11.277 R R = 0.93 0.3163 2 V=12.888 R R = 0.89 0.3183 2 . . Figure 3. Velocity in relation to curve radius in the route Milina-Lafkos (satisfactory quality)—Inexperienced rider. 50150 2500100 200 300 15 45 75 0 30 60 90 Inexperienced rider - Day Inexperienced rider - Night Velocity V (km/h) Curve radius R (m) V=14.044 R R = 0.90 0.2922 2 V=15.499 R R = 0.91 0.3017 2 . . Figure 4. Velocity in relation to curve radius in the route Ne- oxori-Kalamaki (excellent qual ity)—I nexp erien ced r ider . 50150 250 3500100 200 300 10 30 50 70 0 20 40 60 Experienced rider - Day Experienced rider - Night Velocity V (km/h) Curve radius R (m) V=9.2203 R R = 0.94 0.3231 2 V=8.4390 R R = 0.95 0.3628 2 . . Figure 5. Velocity in relation to curve radius in the route Afyssos-Afetai (poor quality)—Experienced rider. 50150 2500100200 10 30 50 70 20 40 60 Experienced rider - Day Experienced rider - Night Velocity V (km/h) Curve radius R (m) V=12.568 R R = 0.92 0.3082 2 V=12.550 R R = 0.88 0.3189 2 . . Figure 6. Velocity in relation to curve radius in the route Milina-Lafkos (satisfactory quality)—Experienced rider. 501502500100 200 15 45 75 0 30 60 90 Experienced rider - Day Experienced rider - Night Velocity V (km/h) Curve radius R (m) V=13.187 R R = 0.80 0.3055 2 V=14.177 R R = 0.88 0.3132 2 . . Figure 7. Velocity in relation to curve radius in the route Ne- oxori-Kalam aki (ex cellent qualit y)—Experi enced rid er. 50150 250 3500100 200 300 20 60 0 40 80 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=8.9161 R R = 0.95 0.3505 2 V=8.6965 R R = 0.96 0.3609 2 . . Figure 8. Velocity in relation to curve radius in the route Afyssos-Afetai (poor quality)—Familiarization of inexperi- enced rider with road conditions. 2575125 175 225050100150 200250 10 30 50 70 20 40 60 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=12.975 R R = 0.81 0.3027 2 V=11.123 R R = 0.77 0.3323 2 . . Figure 9. Velocity in relation to curve radius in the route Milina-Lafkos (satisfactory quality)—Familiarization of in- experienc e d rider with r oa d conditi ons. Copyright © 2013 SciRes. JTTs 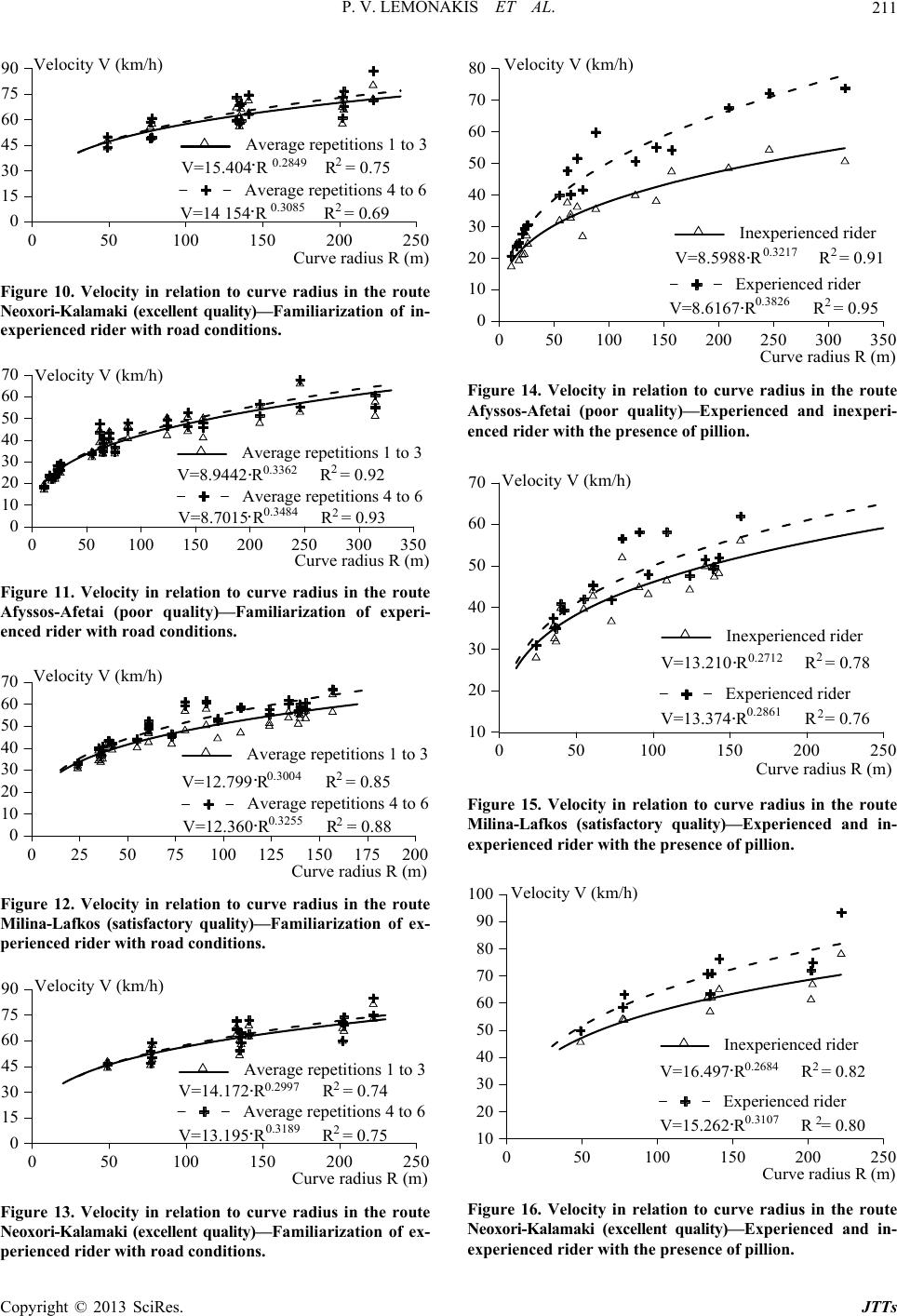 P. V. LEMONAKIS ET AL. 211 50150 2500100200 15 45 75 0 30 60 90 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=14 154 R R = 0.69 0.3085 2 V=15.404 R R = 0.75 0.2849 2 . . Figure 10. Velocity in relation to curve radius in the route Neoxori-Kalamaki (excellent quality)—Familiarization of in- experienc e d rider with r oa d conditi ons. 50150 250 3500100 200 300 10 30 50 70 0 20 40 60 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=8.7015 R R = 0.93 0.3484 2 V=8.9442 R R = 0.92 0.3362 2 . . Figure 11. Velocity in relation to curve radius in the route Afyssos-Afetai (poor quality)—Familiarization of experi- enced rider with road conditions. 2575125 175050100150 200 10 30 50 70 0 20 40 60 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=12.360 R R = 0.88 0.3255 2 V=12.799 R R = 0.85 0.3004 2 . . Figure 12. Velocity in relation to curve radius in the route Milina-Lafkos (satisfactory quality)—Familiarization of ex- perienced rider with road conditions. 50150 2500100200 15 45 75 0 30 60 90 Average repetitions 1 to 3 Average repetitions 4 to 6 Velocity V (km/h) Curve radius R (m) V=13.195 R R = 0.75 0.3189 2 V=14.172 R R = 0.74 0.2997 2 . . Figure 13. Velocity in relation to curve radius in the route Neoxori-Kalamaki (excellent quality)—Familiarization of ex- perienced rider with road conditions. 50150 250 3500100 200 300 10 30 50 70 0 20 40 60 80 Inexperienced rider Experienced rider Velocity V (km/h) Curve radius R (m) V=8.6167 R R = 0.95 0.3826 2 V=8.5988 R R = 0.91 0.3217 2 . . Figure 14. Velocity in relation to curve radius in the route Afyssos-Afetai (poor quality)—Experienced and inexperi- enced rider with the presence of pillion. 50150 2500100 200 10 30 50 70 20 40 60 Inexperienced rider Experienced rider Velocity V (km/h) Curve radius R (m) V=13.374 R R = 0.76 0.2861 2 V=13.210 R R = 0.78 0.2712 2 . . Figure 15. Velocity in relation to curve radius in the route Milina-Lafkos (satisfactory quality)—Experienced and in- experience d rider with the presen ce of pillion. 50150 2500100 200 10 30 50 70 90 20 40 60 80 100 Inexperienced rider Experienced rider Velocity V (km/h) Curve radius R (m) V=15.262 R R = 0.80 0.3107 2 V=16.497 R R = 0.82 0.2684 2 . . Figure 16. Velocity in relation to curve radius in the route Neoxori-Kalamaki (excellent quality)—Experienced and in- xperienced rider with t he presenc e of pillion. e Copyright © 2013 SciRes. JTTs 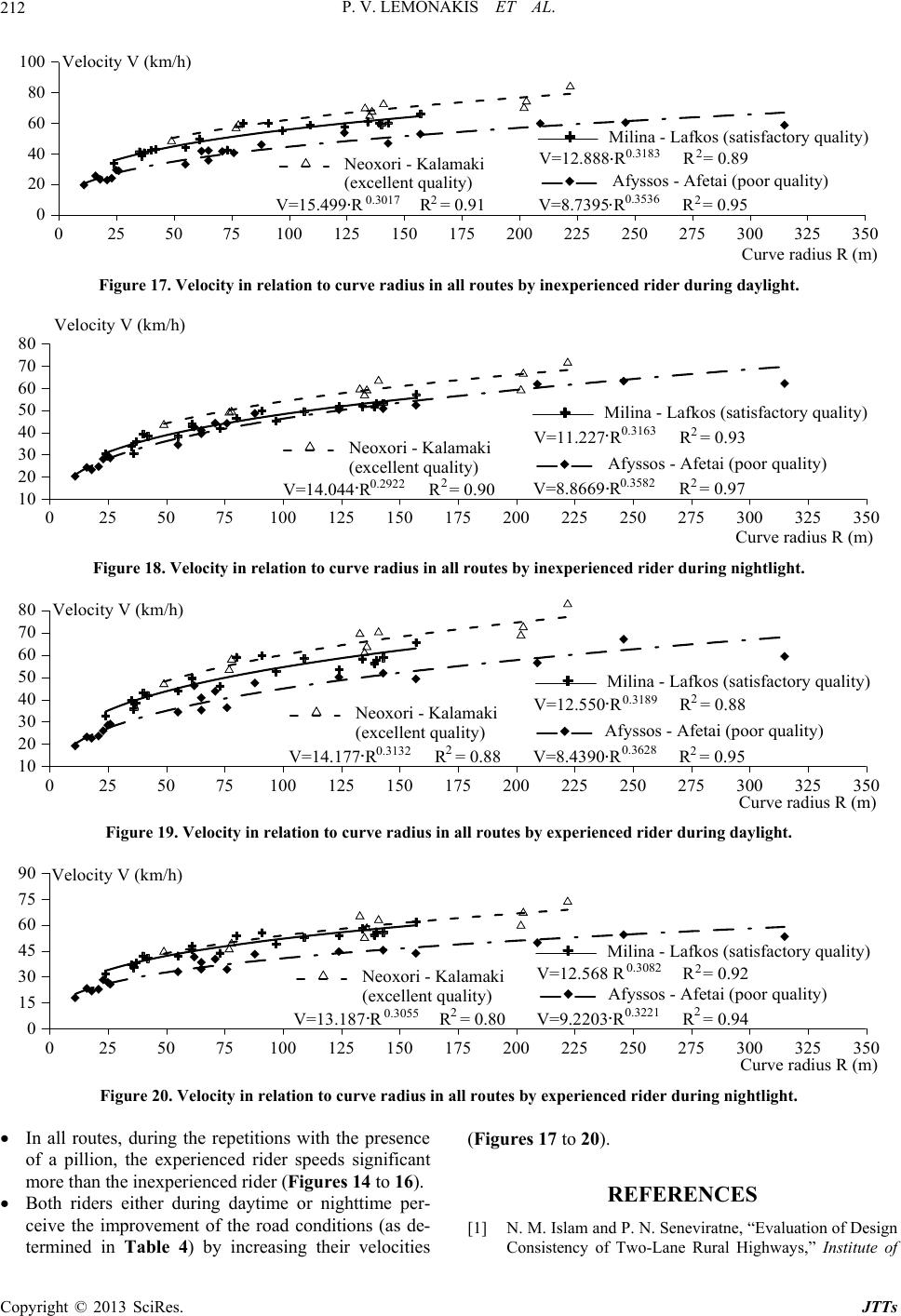 P. V. LEMONAKIS ET AL. Copyright © 2013 SciRes. JTTs 212 2575125 175 225 275 325050100 150 200 250 300 350 20 60 100 0 40 80 Neoxori - Kalamaki (excellent quality) Milina - Lafkos (satisfactory quality) Velocity V (km/h) Curve radius R (m) V=12.888 R R = 0.89 0.3183 2 V=15.499 R R = 0.91 0.3017 2 Afyssos - Afetai (poor quality) V=8.7395 R R = 0.95 2 0.3536 .. . Figure 17. Velocity in relation to curve radius in all routes by inexperienced rider during daylight. 2575125 175 225 275325050100 150 200 250 300 350 10 30 50 70 20 40 60 80 Neoxori - Kalamaki (excellent quality) Milina - Lafkos (satisfactory quality) Velocity V (km/h) s V=11.227 R R = 0.93 0.3163 2 V=14.044 R R = 0.90 0.2922 2 Afyssos - Afetai (poor quality) V=8.8669 R R = 0.97 2 0.3582 .. . Figure 18. Velocity in relation to curve radius in all routes by inexperienced rider during nightlight. 2575125 175 225 275325050100 150 200 250 300 350 10 30 50 70 20 40 60 80 Neoxori - Kalamaki (excellent quality) Milina - Lafkos (satisfactory quality) Velocity V (km/h) a s V=12.550 R R = 0.88 0.3189 2 V=14.177 R R = 0.88 0.3132 2 Afyssos - Afetai (poor quality) V=8.4390 R R = 0.95 2 0.3628 . . . Figure 19. Velocity in relation to curve radius in all routes by experienced rider during daylight. 2575125 175 225275 325050100 150 200250 300 350 15 45 75 0 30 60 90 Neoxori - Kalamaki (excellent quality) Milina - Lafkos (satisfactory quality) Velocity V (km/h) u a ius V=12.568 R R = 0.92 0.3082 2 V=13.187 R R = 0.80 0.3055 2 Afyssos - Afetai (poor quality) V=9.2203 R R = 0.94 2 0.3221 . . Figure 20. Velocity in relation to curve radius in all routes by experienced rider during nightlight. In all routes, during the repetitions with the presence of a pillion, the experienced rider speeds significant more than the inexperienced rider (Figures 14 to 16). (Figures 17 to 20). REFERENCES Both riders either during daytime or nighttime per- ceive the improvement of the road conditions (as de- termined in Table 4) by increasing their velocities [1] N. M. Islam and P. N. Seneviratne, “Evaluation of Design Consistency of Two-Lane Rural Highways,” Institute of  P. V. LEMONAKIS ET AL. 213 Transportation Engineers Journal, Vol. 64, No. 2, 1994, pp. 28-31. [2] A. P. Voigt and R. A. Krammes, “An Operational and Safety Evaluation of Alternative Horizontal Curve Design Approaches on Rural Two-lane Highways,” Proceedings of the International Symposium on Highway Geometric Design Practices, Boston, 30 August-1 September 1995, pp. 11.1-11.8. http://onlinepubs.trb.org/onlinepubs/circulars/ec003/ch11. pdf [3] M. Wooldridge, K. Fitzpatrick, D. Harwood, I. Potts, L. Elefteriadou and D. Torbic, “Geometric Design Consis- tency on High-speed Rural Two-lane Roadways,” Trans- portation Research Program, Washington DC, 2003. http://onlinepubs.trb.org/onlinepubs/nchrp/nchrp_rpt_502 .pdf [4] F. Tate and S. Turner, “Road Geometry and Drivers Speed Choice,” Proceedings of IPENZ Transportation Group Conference, Tauranga, 7-10 October 2007, 15p. http://www.ipenz.org.nz/ipenztg/papers/2007/C2_TateTur ner.pdf [5] T. Esposito, R. Mauro, F Russo and G. Dell’Acqua, “Speed Prediction Models for Sustainable Road Safety Management,” Procedia—Social and Behavioral Sciences, Vol. 20, 2011, pp. 568-576. doi:10.1016/j.sbspro.2011.08.063 [6] S. K. Syed Abbas, M. A. Adnan and I. R. Endut, “Explo- ration of 85th Percentile Operating Speed Model on Hor- izontal Curve: A Case Study for Two-Lane Rural High- ways,” Procedia—Social and Behavioral Sciences, Vol. 16, 2011, pp. 352-363. doi:10.1016/j.sbspro.2011.04.456 [7] C. R. Bennett, “A Speed Prediction Model for Rural Two-Lane Highways,” Ph.D. Dissertation, University of Auckland, Auckland, 1994. [8] A. Mazzella, F. Pinna and C. Piras, “Geostatical Approach for Operating Speed Modelling on Italian Roads,” Pro- ceedings of the 4th International Symposium on Highway Geometric Design, Transportation Research Board, Va- lencia, 2-5 June 2010, 14p. http://www.4ishgd.valencia.upv.es/index_archivos/61.pdf [9] Y. D. Wong and A. Nicholson, “Driver Behaviour at Horizontal Curves: Risk Compensation and the Margin of Safety,” Accident Analysis and Prevention, Vol. 24, No. 4, 1992, pp. 425-436. doi:10.1016/0001-4575(92)90053-L [10] Transportation Research Board, “Modeling Operating Speed—Synthesis Report,” Washington DC, 2011. http://onlinepubs.trb.org/onlinepubs/circulars/ec151.pdf [11] P. Perco, “Comparison between Powered Two Wheeler and Passenger Car Free-Flow Speeds in Urban Areas,” Journal of the Transportation Research Board, No. 2074, 2008, pp. 77-84. doi:10.3141/2074-10 [12] S. F. Faezi, H. Hamid and S. R. Davoodi, “Predicting Speed Model of Horizontal Curves on Exclusive Motor- cycle Lane,” Australian Journal of Basic and Applied Sciences, Vol. 5, No. 5, 2011, pp. 590-598. [13] FESTA (Field opErational teSt supporT Action), “Primer on Experimental Procedures,” 2008. https://dspace.lboro.ac.uk/dspace-jspui/bitstream/2134/57 04/1/AR2601%20FESTA%20D2%203%20Primer%20on %20experimental%20procedures.pdf [14] G. Yannis, J. Golias, E. Papadimitriou and I. Spyropoulou, “Accident Risk Analysis of Passenger Car Drivers and Two-Wheeler Riders in Greece,” Proceedings of the 3rd National Conference on Road Safety, Patra, 10-11 Octo- ber 2005, 16p. [15] S. Laporte and S. Espié (coordinators), “Understanding Risk Taking Behaviour within the Context of PTW Rid- ers,” 2-Wheeler Behavior & Safety—7th Framework Program, 2011. http://www.2besafe.eu/sites/default/files/deliverables/2BE S_D7_SocialCognitiveAndBehaviouralDifference s OfPT W RidersWithReferenceToTheirAttitudesTowardsRiskAndSa fety.pdf [16] F. G. Pratico and M. Giunta, “Operational and Safety Effects of Two-Lane Roads Alignment,” Proceedings of the 4th International Symposium on Highway Geometric Design, Transportation Research Board, Valencia, 2-5 June 2010, 14p. http://www.4ishgd.valencia.upv.es/index_archivos/73.pdf [17] M. Castro, J. Sanchez, N. Ardila and J. Melo, “Speed Models for Highway Consistency Analysis. A Colombian Case Study,” Proceedings of the 4th International Sym- posium on Highway Geometric Design, Transportation Research Board, Valencia, 2-5 June 2010, 15p. http://www.4ishgd.valencia.upv.es/index_archivos/28.pdf [18] A. Abdul-Mawjoud and G. Sofia, “Development of Mod- els for Predicting Speed on Horizontal Curves for Two- Lane Rural Highways,” The Arabian Journal for Science and Engineering, Vol. 33, No. 2B, 2008, pp. 365-377. Copyright © 2013 SciRes. JTTs
|