 Journal of Intelligent Learning Systems and Applications, 2010, 2, 167-178 doi:10.4236/jilsa.2010.24020 Published Online November 2010 (http://www.scirp.org/journal/jilsa) Copyright © 2010 SciRes. JILSA 167 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI* Takayuki Nozawa1,#, Toshiyuki Kondo2 1Institute of Development, Aging and Cancer, Tohoku University, Sendai, Japan; 2Institute of Symbiotic Science and Technology, Tokyo University of Agriculture and Technology, Tokyo, Japan; # corresponding author. Email: nozawa@idac.tohoku.ac.jp, t_kondo@cc.tuat.ac.jp Received March 25th, 2010; revised September 8th, 2010; accepted September 13th, 2010. ABSTRACT For most applications of human-agent interaction (HAI) research, maintaining the user’s interest and continuation of interaction are the issu es of primary importance. To achieve susta inable HAI, we proposed a ne w model of intrin sically motivated adaptive agen t, which learns about th e human partner and behaves to sa tisfy its intrinsic motivation. Simula - tion of interaction with several types of other agents demonstrated how the model seeks new relationships with the partner and avoids situations which are not learnable. To investigate effectiveness of the model, we conducted a com- parative HAI experiment with a simple intera ction setting. The results showed that the model was effective in inducing subjective impressions of higher enjoyability, charm, and sustainability. Information theoretic analysis of the interac- tion suggested that a balanced information transfer between the agent and human partner would be important. The par- ticipants’ brain activity measured by functional near-infrared spectroscopy (fNIRS) indicated higher variability of ac- tivity at the dorsola teral p refrontal cortex during the in teractio n with the proposed agen t. These results sugg est that the intrinsically motivated adaptive agent successfully maintained the participants’ interest, by affecting their attention level. Keywords: Human-Agent Interaction (HAI), Intrinsic Motivation, Reinforcement Learning, Functional Near-Infrared Spectroscopy (Fnirs) 1. Introduction Research on human-agent interaction (HAI) and hu- man-robot interaction (HRI) has recently been growing and producing a wide range of applications, such as en- tertainment, therapeutic use, media of communication, and other kinds of assistance for intellectual activities [1]. For most of these applications, maintaining the user’s interest and continuation of interaction are the issues of primary importance. Among the various factors which affect the impression of HAI, Nakata et al. focused on the predictability of the behavior of agents. They experimentally studied how different degrees of randomness in the behavior affect the impression about the agents, and showed that maxi- mum human interest is achieved by interaction with the agent of intermediate informational transmission effi- ciency [2,3]. Similarly, Kondo et al. investigated the re- lationship between the predictability and sustainability of the interaction, and showed that moderate degree of pre- dictability can contribute to the sustainability [4]. However, humans get bored even with agents of mod- erate predictability, once they fix their mental model about the agents as such. To achieve more sustainable HAI, it will be useful to take notice of our own motiva- tion in HAI, as well as in interaction with other human or animal. We are generally willing to continue interaction with others when it satisfies our intrinsic motivation for curiosity, exploration, manipulation, achievement, etc. [5]. Therefore, one promising approach to more “natural” and sustainable HAI would be to endow the agent with the intrinsic motivation. *This study was in part supported by “Symbiotic Information Technol- ogy Research Project” of Tokyo University of Agriculture and Tech- nology, and also by the Grant-in-Aid for “Scientific Research on Prior- ity Areas (Area No. 454)” from the Japanese Ministry of Education, Culture, Sports, Science and Technology. A preliminary report of this study was presented at the 16th International Conference on Neural Information Processing (ICONIP2009), Thailand, in December 2009. Intrinsic motivation has recently been utilized in de- velopmental robotics (also known as epigenetic robotics or ontogenetic robotics) to learn progressively from sim- pler to more complex situations, avoiding situations in  Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI 168 which nothing can be learned [6,7]. However, effective- ness of intrinsically motivated agent on HAI is not cer- tain because, unlike the usual cases in developmental robotics, the environment (human partner) can be highly dynamic. Indeed, the effectiveness of intrinsically moti- vated agent for sustainable HAI is yet to be explored. In this study, therefore, we proposed a new model of adaptive interaction agent which learns about the human partner and behaves to satisfy its intrinsic motivation. The model’s dynamical properties were analyzed by simulating interaction with several types of other agents. To investigate the model’s effectiveness for enjoyable and sustainable HAI, we implemented the agent for a simple interaction setting and conducted a comparative experiment. In addition to investigating subjective im- pressions of the agents and the interaction log, we meas- ured the activities of the prefrontal brain region of the participants during interaction by functional near-infrared spectroscopy (fNIRS), to study the effect of different types of agents on their cognitive states. The rest of the paper is organized as follows. The model of intrinsically motivated adaptive agent is defined in Section 2. In Section 3, its dynamical properties are described by simulation. Section 4 explains the setting of HAI experiment. Section 5 gives the experimental results. Finally, Section 6 concludes the paper. 2. Model of Intrinsically Motivated Adaptive Agent 2.1. Adaptivity and Reinforcement Learning We focus on discrete, turn-taking type of interaction, which means that an interaction is described from the agent’s viewpoint as a sequence , 11 tttt asas (1) where denotes sensory input from the human partner to the agent at time S t s , and denotes ac- tion of the agent at A t a . An agent driven by certain motivation system—whether intrinsic or extrinsic—must be able to adapt to the envi- ronment (partner), to satisfy its motivation. We use the TD learning [8], which is a standard method in reinforcement learning (RL), to model the adaptive agent. In the framework of RL, each input t is accompa- nied by a reward . When a new input 1t is obtained, the agent updates value of the preceding input t based on the stored reward and the current value function s Rrts st r RV :, as 1 ()( ), () (). tt tt ttt rVs Vs Vs Vs (2) Here is learning rate parameter of the value function, and is discount rate of a future reward in the present value. Values of these parameters should be determined empirically, taking the nature of the problem to be learned into account. In the initial state, without any a priori knowledge, one can set for all 0)( sV . Based on the value function , the agent selects an action which is likely to maximize expected values for the next moment. The method of action selection is given in Section 2.2. V ) 1 ) {1 ) tT tT a a Ps ),( ),( if ,(1{ asP as sP CC CC 2.2. Internal Model In many simple learning problems, the reward t is di- rectly associated with t. In the intrinsically motivated agent, however, t is derived from the agent’s internal model of the environment (human partner). r ), t a ) t a s T P 1 , )} , ) wise. t t t sa ss C P s r The role of the internal model is to predict what will be the next input 1t given a context , and how it is likely that a contextual situation itself will take place. s(t s ,( t s Extension of the following discussion for context 111 LtttLttt with longer history length is straight forward. However, longer history requires exponentially longer period of interaction to obtain a stable internal model. ,,,;,,( aaass L ,s | 1t s , tas Ps For some specific problems, one could construct pa- rametric internal models, which can be useful to save computational resources. Here, however, we adopt more extensive approach and define the internal model as a combination of the transition probability distribution and the context probability distribution . ),( ttT asP )( tC P The internal model is updated based on the interaction history (1). As mentioned earlier, human partner can be highly dynamic. Therefore, the update of the internal model should incorporate decay of the memory. When the current context and the new input 1t are given, the transition probability distribution is up- dated by ),( tt as (| ,(| if (| , )(| ,(| , other Tt Tt Ttt Tt Tt Pss Ps sa Pss sa (3) Similarly, the context probability distribution is updated by otherwise. ),( ),,( )}),( ),( asP as aasP asP C tt C C (4) T and C are learning rates of the internal model. Appropriate values of these parameters should be deter- Copyright © 2010 SciRes. JILSA  Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI169 mined based on the sizes of input/output sets and the dynamic property of the partner. If the rates are too large, the agent loses the memory of interaction history too quickly, and thus fails to obtain an acceptable internal model. Due to the exponential nature of the update rules, possible criteria for the upper bounds of the parameters could be 2/1)1( S T and 2/1)1( AS C . If the rates are too small, on the other hand, the agent cannot catch up with the dynamic change of the human partner. Therefore, the lower bounds depend on the property of the partner, and these parameters should be empirical. The important point is avoiding extremely small values and thus giving the agent some opportunities to take ini- tiative in the interaction (generally, this does not require fine tuning). In the initial state, when no a priori knowledge is available, S/1),|'( assP T for all SAS )',,(sas and AS /1),( asPC for all . AS ),( as The transition probability T is also used to derive action values for the action selection, as P ' 1).,|'()'()|( stttTtt aasssPsVsaaV (5) We utilize the Boltzmann action selection method, so the probability of the agent selecting action aat , given , is t s ,)|( /)|( /)|( b TsbV TsaV tt t t e e saap (6) where is the temperature parameter, which deter- mines the balance between the maximization of the ex- pected value based on the current value function and the exploration for refinement of the value function. T 2.3. Intrinsic Motivation for Information Transfer In considering the proper expression of reward for the intrinsically motivated adaptive agent, we directed our attention on the transfer entropy [9], which is an infor- mation-theoretic measure quantifying the causal interac- tion between two systems, excluding the shared informa- tion due to common history. The transfer entropy can be utilized to characterize autonomous systems [10]. From the probability distribution of triadic inter- action sequence , transfer entropy from the agent (A) to the human partner (H) is given as p ),,( 1ttt sas ttt sas tt ttt ttttt ttttt tttHA ssp assp aspassp assHssH sasMITE . )|( ),|( log),(),|( ),|()|( )|;( 11 1 1 11 1 (7) Here and tt ss ttttttsspsspssH 1)|(log),()|( 111 1 1 (|,) (,,)log(| ttt tttttt tt sas 1 , t1 ) ssapsas ps sa are the conditional entropy, and is the conditional mutual information. The more the agent’s action t has influence on the human’s response 1t given the same t, the larger HA becomes (in other words, the more information the agent can transfer to the human partner). )|;( 1ttt sasMI TE a s s TE Our intrinsically motivated adaptive agent tries to maximize this measure of influence HA on the hu- man partner. This leads the following reward function 1 ,1 1 1 (|, log (| (|, log (| Tt tt CT tt Tt t Tt b Ps sa Ps s Ps sa Ps ) ) ) , tb t sb (,) . )(,) Ct Ct Psb Psb , TPP 1t r (8) Note that the reward is expressed in terms of the in- ternal model . Maximization of the reward leads to the maximization of HA TE (note the correspon- dence between the reward term and the term in Equation (7), given that the internal model is sufficiently precise). )( C By replacing all the probability terms in Equation (7) with those of the internal model, one can also obtain the agent’s subjective transfer entropy 1 1 1 1 (| , (| t t s a sa ,)(,) ) (,) . ,)(,) tC tt t Ct b t Ct Psa Psb sbPsb (| g t T t s Tt Tt b STEP s Ps Ps lo tt sa AH s )|( ssP (9) As the agent cannot directly access the probability dis- tribution in Equation (7), the subjective transfer en- tropy provides a dynamic estimate, from the viewpoint of the agent, of how much it is controlling the environment (partner). When the internal model is well adapted, the subjective transfer entropy gives a good estimate of . p HA Let us describe through several possible situations how the reward (8) controls the behavior of the agent. First, when the agent finds an action t which can effectively induce otherwise rare response 1t givent, ttTCtttT and the reward is high. However, when the agent repeats the same pattern of interaction sequence tt for its high value, both the numerator and denominator terms of (8) come close to 1 due to the update rules (3) and (4), so the reward and the value decrease, which correspond to the loss of inter- est, making the agent stop the repetition. On the other hand, when t is followed by an unexpected 1t given t, that is, 1,1 ttTCtttT , the re- ward becomes negative, and such cases occur more often in the situations where the agent cannot influence the human response. Taking these considerations together, one can expected that the reward makes the agent pursue TE a ) ) 1t ),a s s |()( 1, ssasP ,,( sas a |( ssP ,| 1s s P Copyright © 2010 SciRes. JILSA  Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI 170 intermediate level of novelty, avoiding situations in which nothing can be learned, in a similar way as the intel- ligent adaptive curiosity proposed by Oudeyer et al. [7]. 0100 200 300400 0.0 0.2 0.4 0.6 0.8 1.0 time [step] Probabilit y act ion 1 act ion 2 act ion 3 2.4. Algorithm Combining the components described above, the opera- tion of the intrinsically motivated adaptive agent can be described in the following procedural form: Initialize ),,( 000 ras , the value function V, and the internal model ),(PP ; CT Starting from 0t, repeat ○ With the given context ),( tt as , obtain new input s from the environment (partner); 1t ○ Update the value function )( t sV by the TD learning method (2); ○ Update the internal model ),( CT PP by the rules (3) and (4); (a) 0100 200 300 400 0.00.20.40.60.8 time [step] Subject ive Transf er Entropy [ bit] (b) ○ Evaluate the reward 1t r by (8), and store it for the update of value function (2) in the next time step; ○ Select the action 1t a using the rules (5) and (6); ○ 1 tt; 3. Simulation In this section, we describe the behavior of the intrinsi- cally motivated adaptive agent by simulating its interac- tion with several types of other agents. In the following, both the intrinsically motivated agent and the other agent accept three types of inputs and take three types of actions; that is, }3,2,1{ for both agents. We used the parameter values shown in Table 1 for the intrinsically motivated agent, unless stated other- wise. We utilize the transition of the action probabilities given by Equation (6) and the subjective transfer entropy given by Equation (9) to characterize the interactions. Figure 1. Transition of the action probabilities (a) and the subjective transfer entropy (b) of the intrinsically motivated adaptive agent, which is interacting with the random action agent. 3.1. Interaction with a Random Action Agent less of the input t. In this case, the intrinsically moti- vated agent cannot control the other agent, so the action probabilities fluctuate around the uniform value of 1/3, and the subjective transfer entropy is nearly zero. s Figure 1 shows the transition of action probabilities and the subjective transfer entropy of the intrinsically moti- vated agent interacting with an agent which selects its action randomly with equal probability 1/3, regard- t a3.2. Interaction with a Partially Regular Agent Table 1. Parameter values used for the adaptive agents in Section 3 and 4. Parameter Value Learning rate of value function 0.1 Discount rate of future reward 0.3 Learning rate of transition probability T 0.1 Learning rate of context probability C 0.1 Temperature for action selection T1/30 Next, we study the interaction with a partially regular agent, which chooses its response t to an input by the following response probability matrix at s . 3/203/1 03/23/1 3/13/13/1 )|(, jitt pisjap (10) Note that the inputs 2 t s and 3 to this agent elicit Copyright © 2010 SciRes. JILSA  Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI171 with higher probability the responses and , respectively, while exerts no control on the agent. 2 t a3 1 t s t r otherwise 1 t s 0100200 300 400 0.0 0.2 0.4 0.6 0.8 1.0 time [step] Probability act ion 1 act ion 2 act ion 3 Figure 2 shows the transition of action probabilities and the subjective transfer entropy of the intrinsically motivated agent interacting with the agent defined by Equation (10). The intrinsically motivated agent learns to avoid the action 1 (Figure 2(a)) and to achieve higher degree of control on the partner (Figure 2(b)). This re- sult shows that the agent is actually capable of avoiding situations where nothing can be learned. Figure 2(a) also shows that the intrinsically motivated agent keeps trying to find a new controllable relationship by altering its ac- tion between 2 and 3, rather than adhering to one control strategy. (a) 3.3. Interaction with a Fixed-Reward Adaptive Agent 0100 200300 400 0.00.20.40.60.8 time [step] Subjectiv e Tran s f e r E ntr opy [bit ] Here, the intrinsically motivated agent (agent 1) interacts with another adaptive agent (agent 2), which has the same rules for the update of value function (2) and of the internal model (3), (4), and uses the same method (5), (6) for action selection, with the same parameter values in Table 1, but its reward is directly associated with the input by t s .0 ,if1 t r (11) Figure 3 shows the transition of action probabilities and the subjective transfer entropy of both agents. Similar to in the interaction with the partially regular agent, the intrin- sically motivated agent achieves control on the partner (Figure 3(c)) by altering its action strategy (Figure 3(a)) and thus affecting that of the partner (Figure 3(b)). The fixed-reward agent, on the other hand, does not exert much influence on the intrinsically motivated agent. (b) Figure 2. Transition of the action probabilities (a) and the subjective transfer entropy (b) of the intrinsically motivated adaptive agent in interaction with the partially regular agent. 3.4. Interaction between Two Intrinsically Moti- vated Agents established relationship, by decreasing the ratio of the learning rate of the context probability C to that of the transition probability T . Figure 5 shows the transition of action probabilities and the subjective transfer entropy of the two interacting intrinsically motivated agents, whose C s were set to 0.01. This result indicates that the learning rates control the time scale of the agent’s dynamics, with decreased values inducing slower transi- tion of both the action probability distribution and the subjective transfer entropy. Finally, we show the interaction of two intrinsically mo- tivated agents. Figure 4 shows the transition of action probabilities and the subjective transfer entropy of the two interacting intrinsically motivated agents. In this case, the agents competes with each other for control and keeps changing their strategies (Figure 4(a), (b)), so the subjective transfer entropy does not reach the level achieved in the interactions with more static agents (cf. Figure 2(b) and Figure 3(c)). In summary, the intrinsically motivated agent demon- strated its capabilities to pursue learnable and controlla- ble situations, and to avoid fixed relationship with the partner by altering its action strategy. These features are expected to induce the impression of sometimes unpre- As discussed in Section 2.2, the time scale in which the intrinsically motivated agent changes its strategy de- pends on the learning rates of the internal model; there- fore, the agent becomes slower to lose its interest in the Copyright © 2010 SciRes. JILSA  Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI 172 0100 200 300400 0.0 0.2 0.4 0.6 0.8 1.0 time [step] Probabilit y act ion 1 act ion 2 act ion 3 0100 200 300400 0.00.2 0.4 0.60.81.0 time [step] Probabilit y act ion 1 act ion 2 act ion 3 (a) (a) 0100200300400 0.0 0.20.4 0.6 0.8 1.0 time [step] Probability act ion 1 act ion 2 act ion 3 0100 200 300400 0.0 0.2 0.4 0.60.8 1.0 time [step] Probability act ion 1 act ion 2 act ion 3 (b) (b) 0100 200 300 400 0.0 0.2 0.4 0.6 0.8 0100 200 300 400 0.0 0.2 0.4 0.6 0.8 time [step] Subject ive Trans f er Entropy [ bit] Agent 12 Agent 21 0100 200 300 400 0.00.20.40.60.8 0100 200 300 400 0.00.20.40.60.8 time [step] Subjective Transfer Entropy [bit] Agent 12 Agent 21 (c) (c) Figure 3. Transition of the action probabilities of the intrin- sically motivated agent (agent 1; a), that of the fixed-reward adaptive agent (agent 2; b), and the subjective transfer en- tropy (c) of both agents. Figure 4. Transition of the action probabilities of the two intrinsically motivated agents ((a) agent 1, (b) agent 2), and their subjective transfer entropy (c). Copyright © 2010 SciRes. JILSA 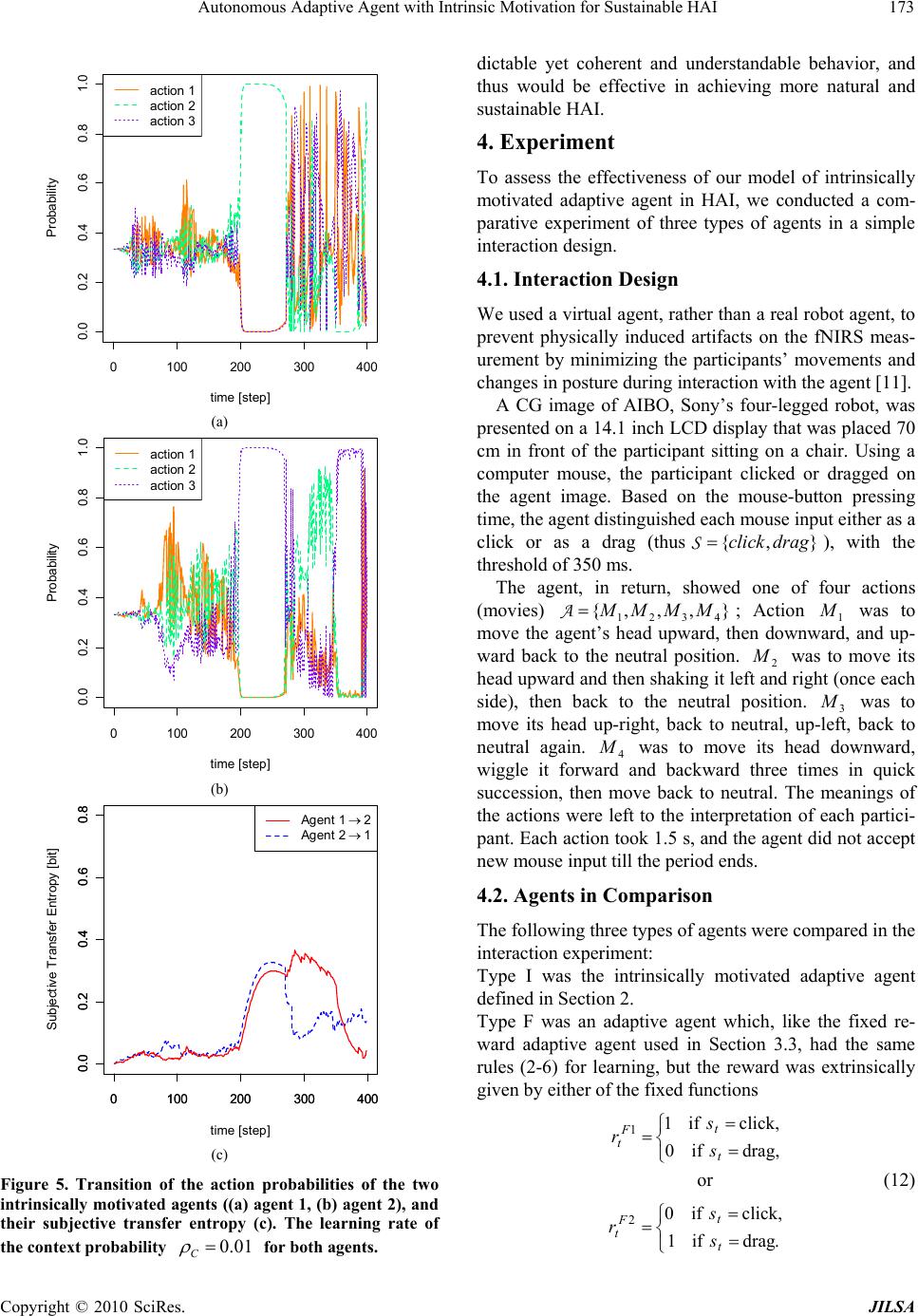 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI173 dictable yet coherent and understandable behavior, and thus would be effective in achieving more natural and sustainable HAI. 0100 200 300 400 0.0 0.20.40.6 0.81.0 time [step] Probabili ty action 1 action 2 action 3 4. Experiment To assess the effectiveness of our model of intrinsically motivated adaptive agent in HAI, we conducted a com- parative experiment of three types of agents in a simple interaction design. 4.1. Interaction Design We used a virtual agent, rather than a real robot agent, to prevent physically induced artifacts on the fNIRS meas- urement by minimizing the participants’ movements and changes in posture during interaction with the agent [11]. A CG image of AIBO, Sony’s four-legged robot, was presented on a 14.1 inch LCD display that was placed 70 cm in front of the participant sitting on a chair. Using a computer mouse, the participant clicked or dragged on the agent image. Based on the mouse-button pressing time, the agent distinguished each mouse input either as a click or as a drag (thus), with the threshold of 350 ms. },{ dragclickS (a) 0100 200300400 0.00.20.4 0.60.81.0 time [step] Probability act ion 1 act ion 2 act ion 3 The agent, in return, showed one of four actions (movies) },,,{ 4321 MMMM A M ; Action 1 was to move the agent’s head upward, then downward, and up- ward back to the neutral position. 2 was to move its head upward and then shaking it left and right (once each side), then back to the neutral position. 3 was to move its head up-right, back to neutral, up-left, back to neutral again. 4 was to move its head downward, wiggle it forward and backward three times in quick succession, then move back to neutral. The meanings of the actions were left to the interpretation of each partici- pant. Each action took 1.5 s, and the agent did not accept new mouse input till the period ends. M M M (b) 0100 200 300 400 0.00.20.4 0.6 0.8 0100 200 300 400 0.00.20.4 0.6 0.8 time [step] Subjec tiv e Tr ans fer E ntro py [bit] Age nt 12 Age nt 21 4.2. Agents in Comparison The following three types of agents were compared in the interaction experiment: Type I was the intrinsically motivated adaptive agent defined in Section 2. Type F was an adaptive agent which, like the fixed re- ward adaptive agent used in Section 3.3, had the same rules (2-6) for learning, but the reward was extrinsically given by either of the fixed functions ,dragif0 ,clickif1 1 t t F ts s r (c) o r (12) Figure 5. Transition of the action probabilities of the two intrinsically motivated agents ((a) agent 1, (b) agent 2), and their subjective transfer entropy (c). The learning rate of the context probability 01.0 C for both agents. .dragif1 ,clickif0 2 t t F ts s r Copyright © 2010 SciRes. JILSA 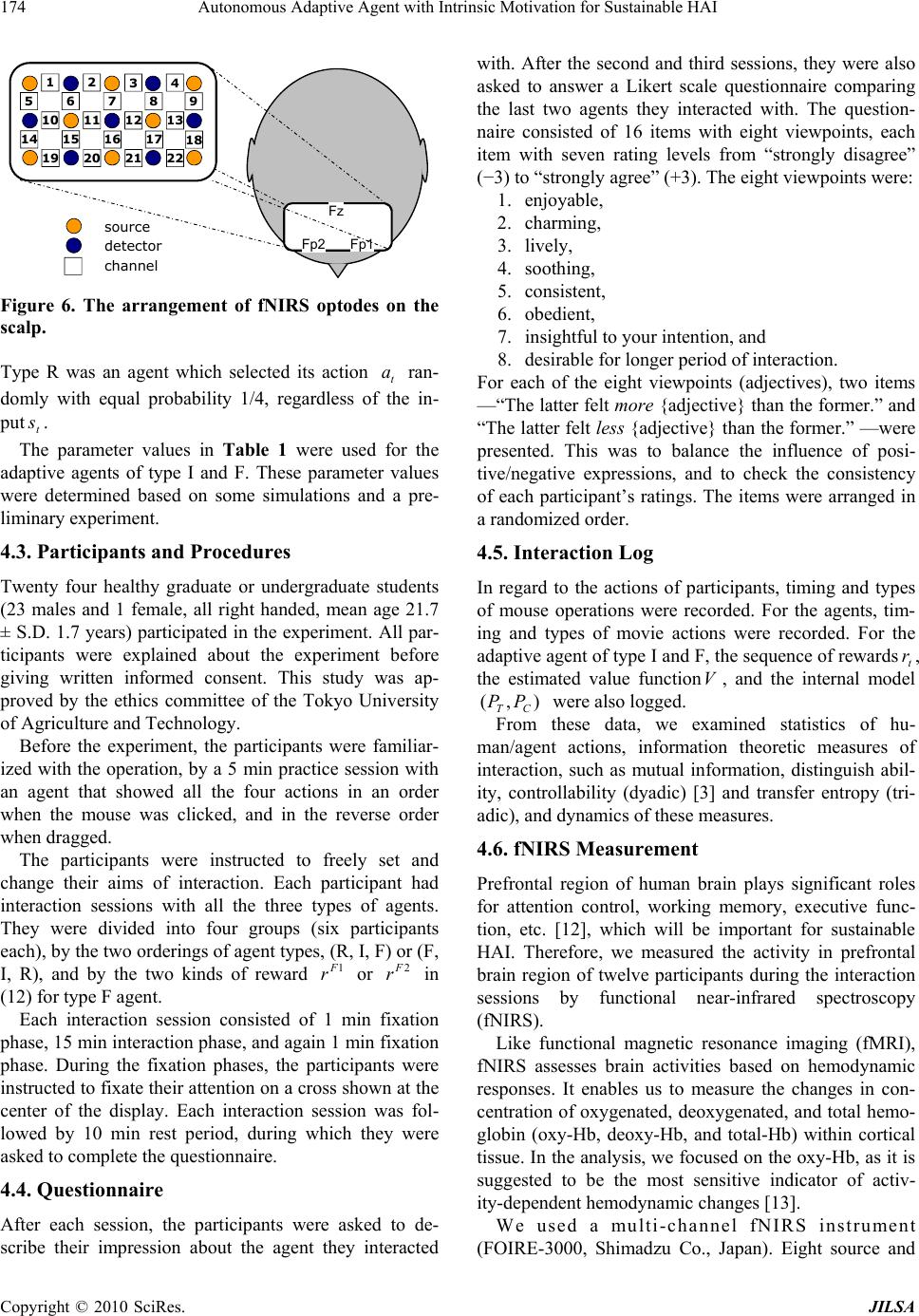 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI 174 1 2 34 10 1112 13 19 2021 22 567 8 14 1516 17 9 18 source detector channel Fz Fp1 Fp2 Figure 6. The arrangement of fNIRS optodes on the scalp. Type R was an agent which selected its action ran- domly with equal probability 1/4, regardless of the in- put . t a t s The parameter values in Table 1 were used for the adaptive agents of type I and F. These parameter values were determined based on some simulations and a pre- liminary experiment. 4.3. Participants and Procedures Twenty four healthy graduate or undergraduate students (23 males and 1 female, all right handed, mean age 21.7 ± S.D. 1.7 years) participated in the experiment. All par- ticipants were explained about the experiment before giving written informed consent. This study was ap- proved by the ethics committee of the Tokyo University of Agriculture and Technology. Before the experiment, the participants were familiar- ized with the operation, by a 5 min practice session with an agent that showed all the four actions in an order when the mouse was clicked, and in the reverse order when dragged. The participants were instructed to freely set and change their aims of interaction. Each participant had interaction sessions with all the three types of agents. They were divided into four groups (six participants each), by the two orderings of agent types, (R, I, F) or (F, I, R), and by the two kinds of reward 1F or 2F in (12) for type F agent. Each interaction session consisted of 1 min fixation phase, 15 min interaction phase, and again 1 min fixation phase. During the fixation phases, the participants were instructed to fixate their attention on a cross shown at the center of the display. Each interaction session was fol- lowed by 10 min rest period, during which they were asked to complete the questionnaire. 4.4. Questionnaire After each session, the participants were asked to de- scribe their impression about the agent they interacted with. After the second and third sessions, they were also asked to answer a Likert scale questionnaire comparing the last two agents they interacted with. The question- naire consisted of 16 items with eight viewpoints, each item with seven rating levels from “strongly disagree” (−3) to “strongly agree” (+3). The eight viewpoints were: 1. enjoyable, 2. charming, 3. lively, 4. soothing, 5. consistent, 6. obedient, 7. insightful to your intention, and 8. desirable for longer period of interaction. For each of the eight viewpoints (adjectives), two items —“The latter felt more {adjective} than the former.” and “The latter felt less {adjective} than the former.” —were presented. This was to balance the influence of posi- tive/negative expressions, and to check the consistency of each participant’s ratings. The items were arranged in a randomized order. 4.5. Interaction Log In regard to the actions of participants, timing and types of mouse operations were recorded. For the agents, tim- ing and types of movie actions were recorded. For the adaptive agent of type I and F, the sequence of rewardst, the estimated value functionV, and the internal model were also logged. r ),( CTPP From these data, we examined statistics of hu- man/agent actions, information theoretic measures of interaction, such as mutual information, distinguish abil- ity, controllability (dyadic) [3] and transfer entropy (tri- adic), and dynamics of these measures. 4.6. fNIRS Measurement Prefrontal region of human brain plays significant roles for attention control, working memory, executive func- tion, etc. [12], which will be important for sustainable HAI. Therefore, we measured the activity in prefrontal brain region of twelve participants during the interaction sessions by functional near-infrared spectroscopy (fNIRS). Like functional magnetic resonance imaging (fMRI), fNIRS assesses brain activities based on hemodynamic responses. It enables us to measure the changes in con- centration of oxygenated, deoxygenated, and total hemo- globin (oxy-Hb, deoxy-Hb, and total-Hb) within cortical tissue. In the analysis, we focused on the oxy-Hb, as it is suggested to be the most sensitive indicator of activ- ity-dependent hemodynamic changes [13]. We used a multi-channel fNIRS instrument (FOIRE-3000, Shimadzu Co., Japan). Eight source and Copyright © 2010 SciRes. JILSA 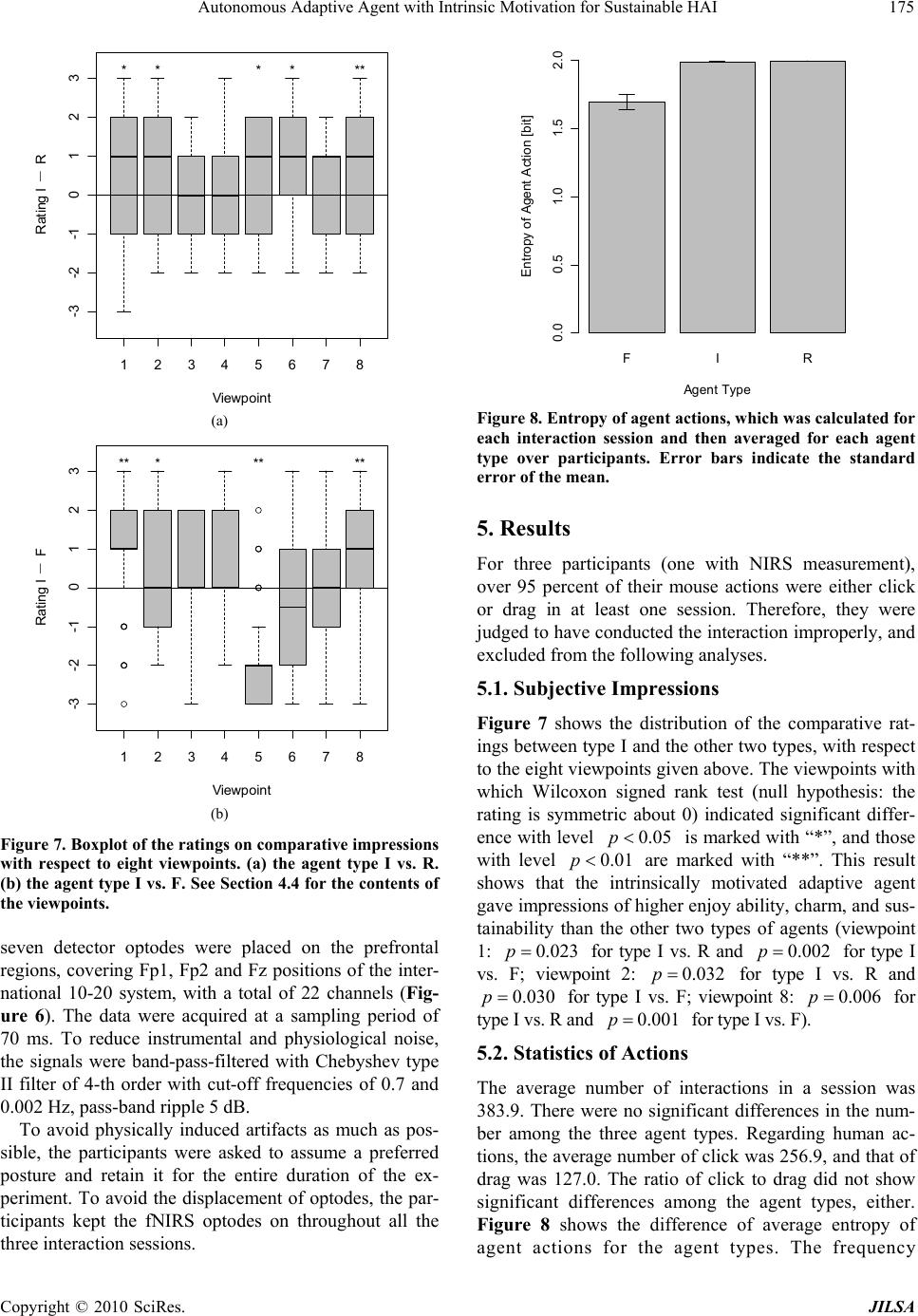 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI Copyright © 2010 SciRes. JILSA 175 12345678 -3 -2 -10123 Viewpoint Rating I - R **** ** FIR A en t T e Entropy o f Ag ent A c tion [bit ] 0.0 0.5 1.0 1.5 2.0 Figure 8. Entropy of agent actions, which was calculated for each interaction session and then averaged for each agent type over participants. Error bars indicate the standard error of the mean. (a) 12345678 -3 -2 -10123 Viewpoint Rating I - F ** ***** 5. Results For three participants (one with NIRS measurement), over 95 percent of their mouse actions were either click or drag in at least one session. Therefore, they were judged to have conducted the interaction improperly, and excluded from the following analyses. 5.1. Subjective Impressions Figure 7 shows the distribution of the comparative rat- ings between type I and the other two types, with respect to the eight viewpoints given above. The viewpoints with which Wilcoxon signed rank test (null hypothesis: the rating is symmetric about 0) indicated significant differ- ence with level 05.0 p 01.0 is marked with “*”, and those with level p 023 are marked with “**”. This result shows that the intrinsically motivated adaptive agent gave impressions of higher enjoy ability, charm, and sus- tainability than the other two types of agents (viewpoint 1: .0 p for type I vs. R and for type I vs. F; viewpoint 2: 002.0p 032.0 p for type I vs. R and 030.0 p for type I vs. F; viewpoint 8: for type I vs. R and 006.0p 001.0 p for type I vs. F). (b) Figure 7. Boxplot of the ratings on comparative impressions with respect to eight viewpoints. (a) the agent type I vs. R. (b) the agent type I vs. F. See Section 4.4 for the contents of the viewpoints. seven detector optodes were placed on the prefrontal regions, covering Fp1, Fp2 and Fz positions of the inter- national 10-20 system, with a total of 22 channels (Fig- ure 6). The data were acquired at a sampling period of 70 ms. To reduce instrumental and physiological noise, the signals were band-pass-filtered with Chebyshev type II filter of 4-th order with cut-off frequencies of 0.7 and 0.002 Hz, pass-band ripple 5 dB. 5.2. Statistics of Actions The average number of interactions in a session was 383.9. There were no significant differences in the num- ber among the three agent types. Regarding human ac- tions, the average number of click was 256.9, and that of drag was 127.0. The ratio of click to drag did not show significant differences among the agent types, either. Figure 8 shows the difference of average entropy of agent actions for the agent types. The frequency To avoid physically induced artifacts as much as pos- sible, the participants were asked to assume a preferred posture and retain it for the entire duration of the ex- periment. To avoid the displacement of optodes, the par- ticipants kept the fNIRS optodes on throughout all the three interaction sessions. 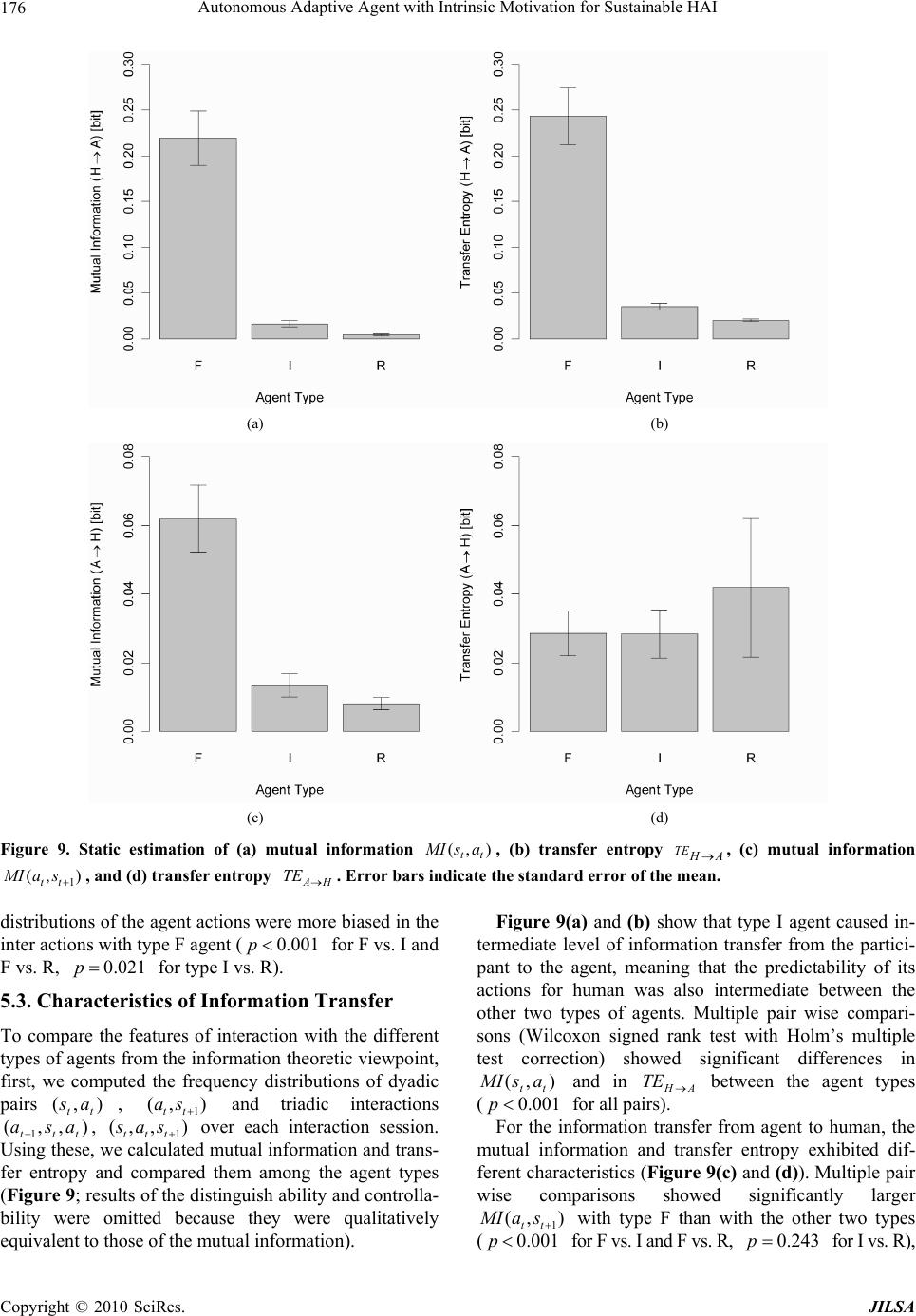 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI 176 (a) (b) (c) (d) Figure 9. Static estimation of (a) mutual information (,) tt Isa, (b) transfer entropy TE, (c) mutual information HA 1 (, ) tt Ias , and (d) transfer entropy . Error bars indicate the standard error of the mean. AH TE Figure 9(a) and (b) show that type I agent caused in- termediate level of information transfer from the partici- pant to the agent, meaning that the predictability of its actions for human was also intermediate between the other two types of agents. Multiple pair wise compari- sons (Wilcoxon signed rank test with Holm’s multiple test correction) showed significant differences in and in between the agent types ( ),( tt asMI 001.0 AH TE p for all pairs). distributions of the agent actions were more biased in the inter actions with type F agent ( for F vs. I and F vs. R, for type I vs. R). 001.0p 021.0p 5.3. Characteristics of Information Transfer To compare the features of interaction with the different types of agents from the information theoretic viewpoint, first, we computed the frequency distributions of dyadic pairs , and triadic interactions t, t over each interaction session. Using these, we calculated mutual information and trans- fer entropy and compared them among the agent types (Figure 9; results of the distinguish ability and controlla- bility were omitted because they were qualitatively equivalent to those of the mutual information). ),( tt as ), tt as),( 1tt sa ), 1tt sa,(1 a,(sFor the information transfer from agent to human, the mutual information and transfer entropy exhibited dif- ferent characteristics (Figure 9(c) and (d)). Multiple pair wise comparisons showed significantly larger with type F than with the other two types ( ),( 1tt saMI 001.0 p for F vs. I and F vs. R, for I vs. R), 243.0p Copyright © 2010 SciRes. JILSA 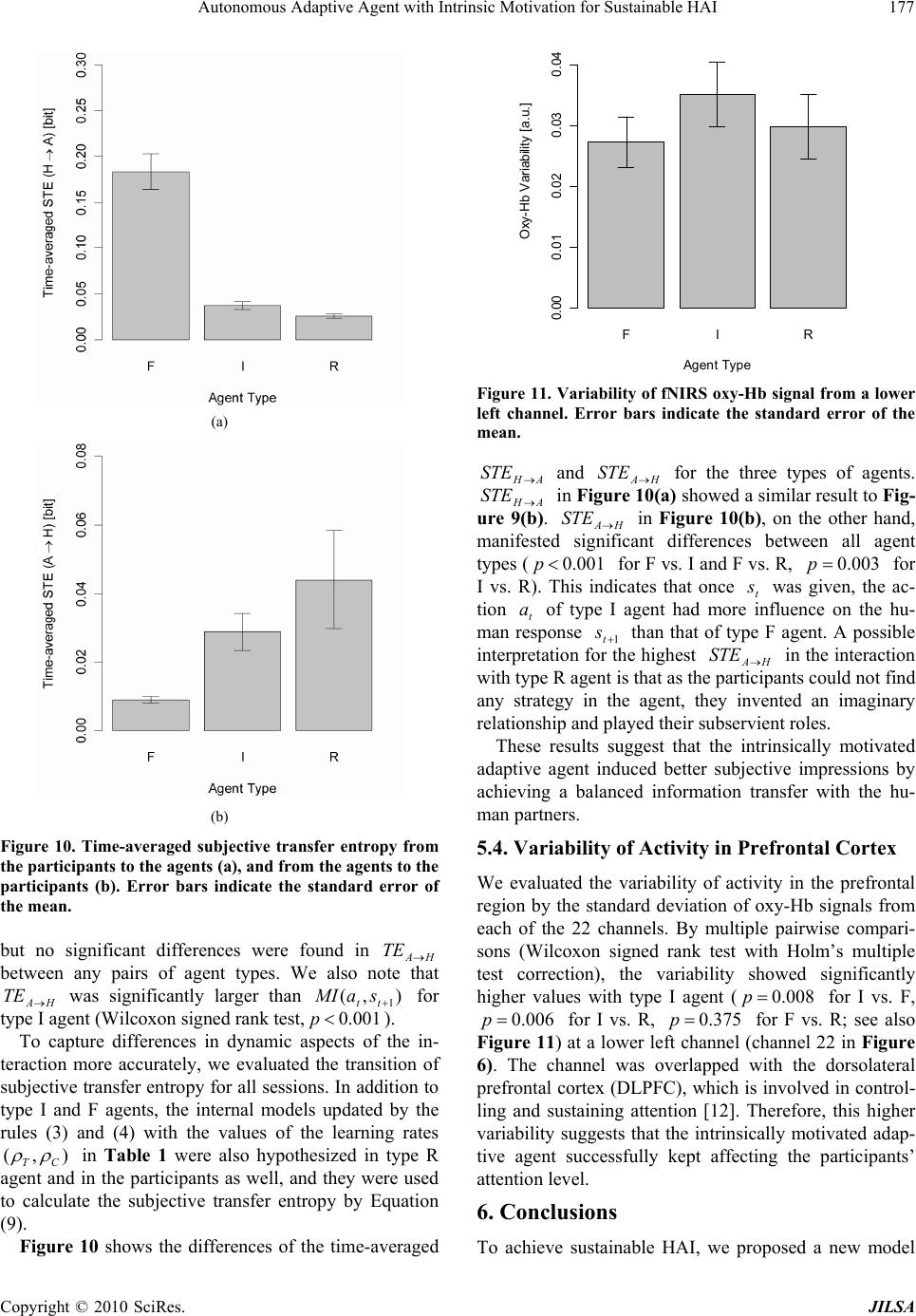 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI177 FIR Agent T ype Ox y-Hb Var iability [a. u. ] 0.00 0.01 0.02 0.03 0.04 Figure 11. Variability of fNIRS oxy-Hb signal from a lower left channel. Error bars indicate the standard error of the mean. (a) AH STE STE and HA for the three types of agents. AH in Figure 10(a) showed a similar result to Fig- ure 9(b). HA in Figure 10(b), on the other hand, manifested significant differences between all agent types ( STE 001 STE .0 p a for F vs. I and F vs. R, for I vs. R). This indicates that once t was given, the ac- tion t of type I agent had more influence on the hu- man response 1t than that of type F agent. A possible interpretation for the highest HA in the interaction with type R agent is that as the participants could not find any strategy in the agent, they invented an imaginary relationship and played their subservient roles. 003.0p s sSTE These results suggest that the intrinsically motivated adaptive agent induced better subjective impressions by achieving a balanced information transfer with the hu- man partners. (b) 5.4. Variability of Activity in Prefrontal Cortex Figure 10. Time-averaged subjective transfer entropy from the participants to the agents (a), and from the agents to the participants (b). Error bars indicate the standard error of the mean. We evaluated the variability of activity in the prefrontal region by the standard deviation of oxy-Hb signals from each of the 22 channels. By multiple pairwise compari- sons (Wilcoxon signed rank test with Holm’s multiple test correction), the variability showed significantly higher values with type I agent ( for I vs. F, 008.0p 006.0 p for I vs. R, 375.0 p for F vs. R; see also Figure 11) at a lower left channel (channel 22 in Figure 6). The channel was overlapped with the dorsolateral prefrontal cortex (DLPFC), which is involved in control- ling and sustaining attention [12]. Therefore, this higher variability suggests that the intrinsically motivated adap- tive agent successfully kept affecting the participants’ attention level. but no significant differences were found in HA TE between any pairs of agent types. We also note that HA was significantly larger than for type I agent (Wilcoxon signed rank test,). TE ) 1t ,(tsaMI 001.0p To capture differences in dynamic aspects of the in- teraction more accurately, we evaluated the transition of subjective transfer entropy for all sessions. In addition to type I and F agents, the internal models updated by the rules (3) and (4) with the values of the learning rates ),( CT in Table 1 were also hypothesized in type R agent and in the participants as well, and they were used to calculate the subjective transfer entropy by Equation (9). 6. Conclusions Figure 10 shows the differences of the time-averaged To achieve sustainable HAI, we proposed a new model Copyright © 2010 SciRes. JILSA 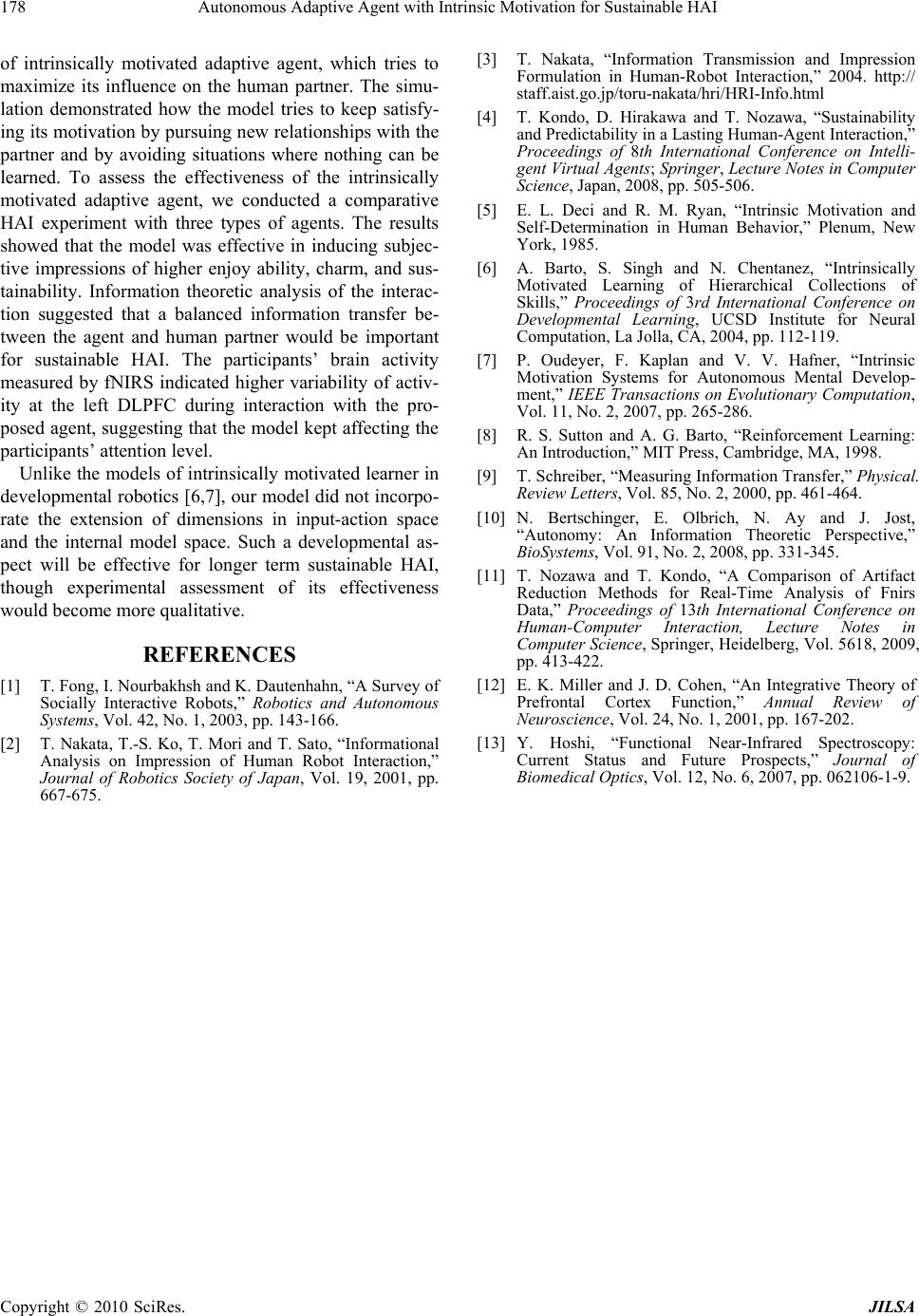 Autonomous Adaptive Agent with Intrinsic Motivation for Sustainable HAI Copyright © 2010 SciRes. JILSA 178 of intrinsically motivated adaptive agent, which tries to maximize its influence on the human partner. The simu- lation demonstrated how the model tries to keep satisfy- ing its motivation by pursuing new relationships with the partner and by avoiding situations where nothing can be learned. To assess the effectiveness of the intrinsically motivated adaptive agent, we conducted a comparative HAI experiment with three types of agents. The results showed that the model was effective in inducing subjec- tive impressions of higher enjoy ability, charm, and sus- tainability. Information theoretic analysis of the interac- tion suggested that a balanced information transfer be- tween the agent and human partner would be important for sustainable HAI. The participants’ brain activity measured by fNIRS indicated higher variability of activ- ity at the left DLPFC during interaction with the pro- posed agent, suggesting that the model kept affecting the participants’ attention level. Unlike the models of intrinsically motivated learner in developmental robotics [6,7], our model did not incorpo- rate the extension of dimensions in input-action space and the internal model space. Such a developmental as- pect will be effective for longer term sustainable HAI, though experimental assessment of its effectiveness would become more qualitative. REFERENCES [1] T. Fong, I. Nourbakhsh and K. Dautenhahn, “A Survey of Socially Interactive Robots,” Robotics and Autonomous Systems, Vol. 42, No. 1, 2003, pp. 143-166. [2] T. Nakata, T.-S. Ko, T. Mori and T. Sato, “Informational Analysis on Impression of Human Robot Interaction,” Journal of Robotics Society of Japan, Vol. 19, 2001, pp. 667-675. [3] T. Nakata, “Information Transmission and Impression Formulation in Human-Robot Interaction,” 2004. http:// staff.aist.go.jp/toru-nakata/hri/HRI-Info.html [4] T. Kondo, D. Hirakawa and T. Nozawa, “Sustainability and Predictability in a Lasting Human-Agent Interaction,” Proceedings of 8th International Conference on Intelli- gent Virtual Agents; Springer, Lecture Notes in Computer Science, Japan, 2008, pp. 505-506. [5] E. L. Deci and R. M. Ryan, “Intrinsic Motivation and Self-Determination in Human Behavior,” Plenum, New York, 1985. [6] A. Barto, S. Singh and N. Chentanez, “Intrinsically Motivated Learning of Hierarchical Collections of Skills,” Proceedings of 3rd International Conference on Developmental Learning, UCSD Institute for Neural Computation, La Jolla, CA, 2004, pp. 112-119. [7] P. Oudeyer, F. Kaplan and V. V. Hafner, “Intrinsic Motivation Systems for Autonomous Mental Develop- ment,” IEEE Transactions on Evolutionary Computation, Vol. 11, No. 2, 2007, pp. 265-286. [8] R. S. Sutton and A. G. Barto, “Reinforcement Learning: An Introduction,” MIT Press, Cambridge, MA, 1998. [9] T. Schreiber, “Measuring Information Transfer,” Physical. Review Letters, Vol. 85, No. 2, 2000, pp. 461-464. [10] N. Bertschinger, E. Olbrich, N. Ay and J. Jost, “Autonomy: An Information Theoretic Perspective,” BioSystems, Vol. 91, No. 2, 2008, pp. 331-345. [11] T. Nozawa and T. Kondo, “A Comparison of Artifact Reduction Methods for Real-Time Analysis of Fnirs Data,” Proceedings of 13th International Conference on Human-Computer Interaction, Lecture Notes in Computer Science, Springer, Heidelberg, Vol. 5618, 2009, pp. 413-422. [12] E. K. Miller and J. D. Cohen, “An Integrative Theory of Prefrontal Cortex Function,” Annual Review of Neuroscience, Vol. 24, No. 1, 2001, pp. 167-202. [13] Y. Hoshi, “Functional Near-Infrared Spectroscopy: Current Status and Future Prospects,” Journal of Biomedical Optics, Vol. 12, No. 6, 2007, pp. 062106-1-9.
|