 Engineering, 2013, 5, 277-291 http://dx.doi.org/10.4236/eng.2013.53038 Published Online March 2013 (http://www.scirp.org/journal/eng) Two Temperature Heat Flux of Semi Infinite Piezoelectric Ceramic Rod Essam Bassiouny1,2*, Refaat Sabry1,3,4, Hamdy Youssef5 1Faculty of Science and Humanitarian Studies, Salman Bin Abdulaziz University, Al-Kharj, KSA 2Department of Mathematics, Faculty of Science, Fayoum University, Fayoum, Egypt 3Theoretical Physics Group, Department of Physics, Faculty of Science, Mansoura University, Damietta Branch, New Damietta, Egypt 4International Centre for Advanced Studies in Physical Sciences, Faculty of Physics and Astronomy, Ruhr University Bochum, Bochum, Germany 5Mechanical Engineering Department, Faculty of Engineering and Islamic Architecture, Umm Al-Qura University, Mecca, KSA Email: *esambassiouny@yahoo.com, sabryphys@yahoo.com, youssefanne2005@gmail.com Received November 14, 2012; revised February 18, 2013; accepted February 25, 2013 ABSTRACT The theory of two-temperature generalized thermoelasticity is used to solve the problem of heating a semi-infinite rod made of a piezoelectric ceramic material within the framework of generalized thermopiezoelasticity theory by supply- ing the rod a certain amount of heat uniformly distributed over a finite time period to the finite end of the rod. The Laplace transform formalism is used to solve the proposed model. Inverse Laplace transforms are computed numeri- cally using a method based on Fourier expansion techniques. The physical parameters (i.e., conductive temperature, dynamical temperature, stress, strain, and displacement distributions) are investigated graphically. Keywords: Two Temperatures; Generalized Thermoelasticity; Thermopiezoelasticity; Thermal Waves; Ceramics; Piezoelectric Materials—Heat Flux 1. Introduction Piezoelastic ceramics have become now prominent and extensively used in many engineering applications espe- cially in mechatronics, structronic systems, sensors, ac- tuators and intelligent structures [1-3]. Piezoelectric ceramic have been extensively used in many engineering and industrial applications. So, the theory of generalized thermo-piezoelectricity has been the object of numerous investigations in the last decades or so, concerning both its theoretical foundations and the applications. It is very well known now that in the classical coupled and uncoupled theories of thermoelasticity, the heat conduction equations are of diffusion type. This means that the heat wave will propagate with Infinite speed, which contradicts the physical observations. Widespread attention to eliminate this paradox has been given to thermoelasticity theories which admit a finite speed for the propagation of thermal waves. Many authors have formulated generalized theories involve a hyperbolic-type heat equation and are referred to as gen- eralized thermoelasticity. Among all these theories, there are two different fa- mous theories of generalized thermoelasticity. The first theory is based on the modified Fourier’s Law of heat conduction and allows for one relaxation time. This is the Lord and Schulman theory [4]. The second theory was developed by Green and Lindsay [5]. It modifies both the energy equation and the Duhamel-Neuman relation. It admits two relaxation times. In this work we solve the problem of heating of a semi-infinite piezoelectric rod by supplying a certain amount of heating uniformly distrib- uted over a finite time period to the finite end. The rod is assumed to be at rest at zero temperature initially. 2. Governing Equations In the absence of body force, free charge and inner heat sources, we consider generalized thermo-piezoelectric governing differential equations [6,7] as follows: Equations of motion: ,ij ji u . (1) Equation of entropy increment (in the absence of inner heat source): *Corresponding author. C opyright © 2013 SciRes. ENG 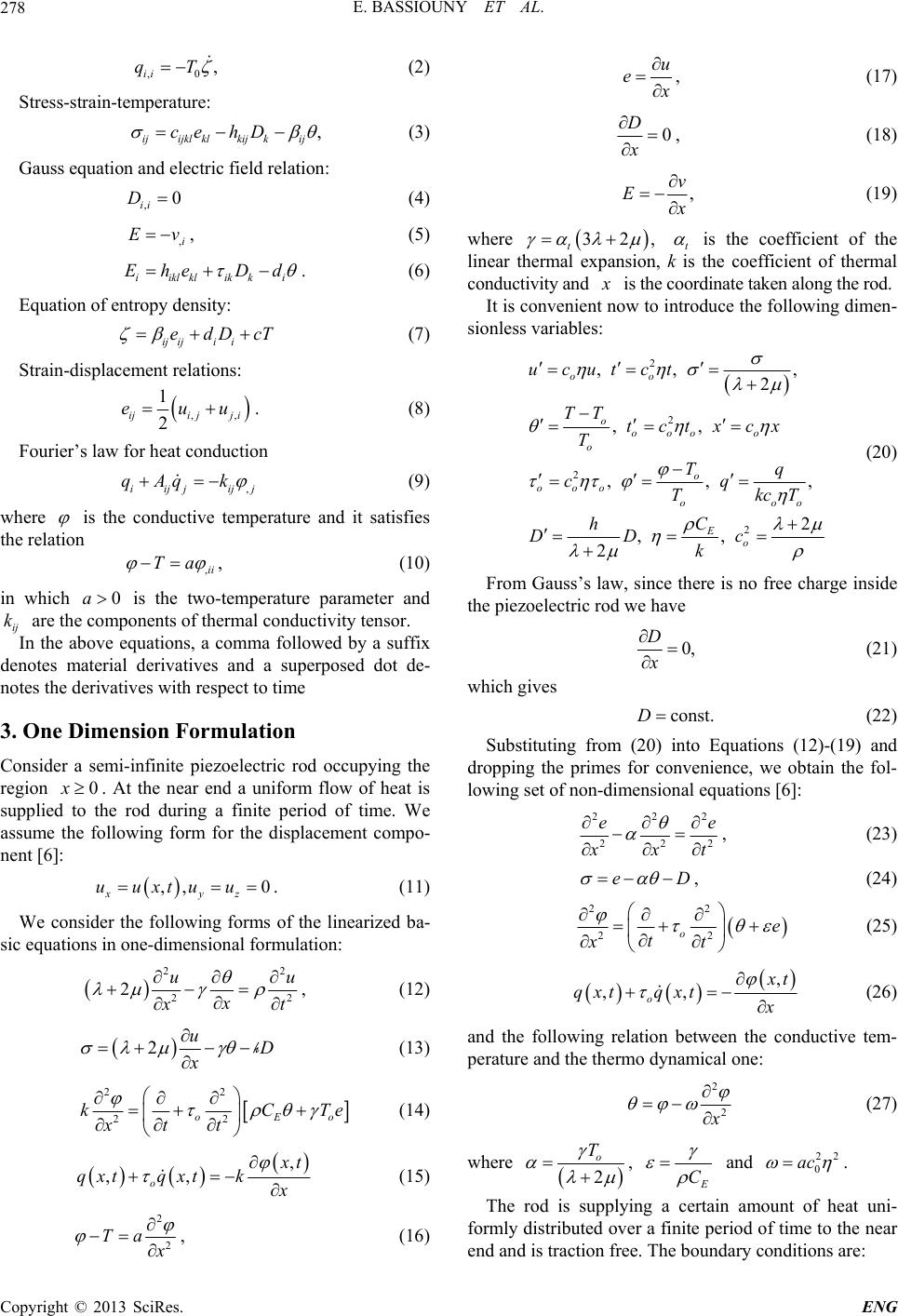 E. BASSIOUNY ET AL. 278 ,0 , ii qT (2) Stress-strain-temperature: , ijijkl klkijkij ce hD (3) Gauss equation and electric field relation: ,0 ii D (4) ,i Ev , (5) iikl klikki Ehe Dd . (6) Equation of entropy density: ij ijii edDcT (7) Strain-displacement relations: ,, 1 2 ijijj i euu. (8) Fourier’s law for heat conduction ,iijj ij qAq kj (9) where is the conductive temperature and it satisfies the relation ,ii Ta , (10) in which is the two-temperature parameter and are the components of thermal conductivity tensor. 0a ij k In the above equations, a comma followed by a suffix denotes material derivatives and a superposed dot de- notes the derivatives with respect to time 3. One Dimension Formulation Consider a semi-infinite piezoelectric rod occupying the region . At the near end a uniform flow of heat is supplied to the rod during a finite period of time. We assume the following form for the displacement compo- nent [6]: 0x ,, 0 xy uuxtuu z . (11) We consider the following forms of the linearized ba- sic equations in one-dimensional formulation: 22 2 2u x2 u t , (12) 2uD x (13) 22 22 oE kC t xt o Te (14) , ,, o t qxtqxt k (15) 2 2 Ta , (16) u e , (17) 0 D x , (18) , v E (19) where 32, t t is the coefficient of the linear thermal expansion, k is the coefficient of thermal conductivity and is the coordinate taken along the rod. It is convenient now to introduce the following dimen- sionless variables: 2 2 2 2 ,,, 2 ,, ,, 2 ,, 2 oo o ooo o o o ooo oo E o ucutct TT tctxcx T Tq cq TkcT C h DD c k , o (20) From Gauss’s law, since there is no free charge inside the piezoelectric rod we have 0, D x (21) which gives const.D (22) Substituting from (20) into Equations (12)-(19) and dropping the primes for convenience, we obtain the fol- lowing set of non-dimensional equations [6]: 22 22 e 2 2 e xt , (23) eD , (24) 22 22 oe t xt (25) , ,, o t qxt qxt (26) and the following relation between the conductive tem- perature and the thermo dynamical one: 2 2 (27) where 2 o T , C and 22 0 ac . The rod is supplying a certain amount of heat uni- formly distributed over a finite period of time to the near end and is traction free. The boundary conditions are: Copyright © 2013 SciRes. ENG  E. BASSIOUNY ET AL. 279 , o ot xs t x (28) where o is the heat flux intensity and o tt the well-known impulse function: 10 0 o o o t o tt t t tt (29) ,0, ,0,0 ,0,0,0,0 tet t ttt (30) while the initial conditions are assumed to be: ,0 0,,0 0,,0 00xex xx (31) Applying the Laplace transform defined by: 0 e st Lftfsft t d (32) to both sides of Equations (23)-(27), we obtain: 22 2 22 dd dd e e xx , (33) D e , (34) 2 2 2 d, do 2 o sss x e (35) , 1, o s sq xs , (36) 2 2 d, d (37) where s denotes the complex argument related to the Laplace transform. The transformed boundary conditions take the forms 1e 0, o st o o o F s xts (38) Thus, the transformed component of the heat flux vector becomes 0, 1 o o o qs q s (39) while the Equations (30) become ,0, ,0 ,0, 0,0 tet tt , , (40) and the corresponding transformed initial conditions of the Equations (31) assume the form: ,0,0,0 00xex xx Eliminating between Equations (35) and (37), we get: 2 2 d dLLe x , (42) where 2 0 2 0 1 ss LLs s . (43) Substituting from Equation (42) into Equation (37), we obtain 1LLe . (44) Using Equation (42) we can easily eliminate be- tween Equations (33) and (44) to obtain 2 2 d d e Ne x , (45) where 2 1 1 1 1 LL MMs L LL NNs L (46) Solving Equations (42) and (45) together we get the following fourth order equation 42 0kakb (47) where, andaLN bLNLM . It is worth men- tioning here that the roots of Equation (47) are functions of s and assume the forms: 22 12 44 , 22 aa baab kk , (48) where 11 1 11 1 oo o o ss ss ass (49) 31 11 1 o o ss bss (50) Thus the solutions of the Equations (42) and (45) sat- isfying the boundary conditions at infinity are: 1 ee 2 kx AB k (51) 1 ee 2 k eC D xk (52) respectively, where 12 are the roots of the Equation (47) and ,kk , B are parameters depending on s to be de- termined using the boundary conditions while the rela- tions between the coefficients ,, , BCD are: (41) Copyright © 2013 SciRes. ENG  E. BASSIOUNY ET AL. 280 22 1 , KLAKLB CD LL 2 (53) Using the boundary conditions (38) and (40) it is easy to verify that: 22 21 , oo kL kL AB GG , (54) where 22 21 12 Gkk Lkk L (55) Substituting form Equations (54) into the Equation (53) we can easily evaluate the coefficients C and D: 22 12 , o kLkL CD LG (56) Therefore, the transformed heat conduction and the strain given by the Equations (51) and (52) respectively become: 2 12 ee o 1 kx k ; (57) where 22 1 12 , kL kL GG 2 , (58) and 2 1ee o 1 kxk ee (59) where 22 12 1 o kLkL eLG . (60) Substituting the expressions of and of e from Equations (57) and (59) into the Equation (44) we get the following form of the thermodynamical function : 2 12 ee o1 kx G k , (61) where 22 22 121212 1,1kkL kkL , (62) Using Equations (59) and (61) it is easy to put given by the Equation (34) in the form: 21 12 ee oD xk xk LG s (63) 22 12 11 22 21 22 ,kLkL L kLkL L (64) Equations (57), (59), (61) and (63) are the complete solutions of the ,, ande In order to invert the Laplace transform, we adopt a numerical inversion method based on a Fourier series expansion [8]. Using this method, the inverse t of the Laplace transform s is approximated by 1 11 1 e1 iπiπ Re exp 2 02, ct N k kk ftfcf c tt tt 1 t t (65) where N is a sufficiently large integer representing the number of terms in the truncated Fourier series, chosen such that 1 11 πiπ exp Reexp NNt ctf ctt , (66) where 1 is a prescribed small positive number that corresponds to the degree of accuracy required and Re is the real part. The parameter c is a positive free parameter that must be greater than the real part of all the singulari- ties of s. The optimal choice of c was obtained ac- cording to the criteria described in 4. Numerical Results and Discussion Distributions of unknown functions along the rod for three different time moments, t = 0.1, 0.2 and 0.3 and for different values of the relaxation time: 0.1 o , 0.05 o and are obtained numerically where the effects of the presence of the two temperature parameter on the unknown functions are illustrated in Figures 1-28. Figures 1-4 illustrate the effects of the presence of the two temperature parameter on the conductive tempera- ture , thermodynamical temperature , stress and strain distribution curves. We note that the two temperature parameter has significant effects on the un- known function fields especially on the strain distribution and the conductive temperature at the nearest end of the rod, it increases the amplitude of the unknowns at the nearest end of the rod and it has no effects far from the nearest end as seen on Figures 1 and 4. e The presence of the two temperature parameter leads to removing decreases the number of peaks as shown in Figure 4. Figures 5-13, illustrate the effects of the relaxation time 0.05, 0.1 oo in the presence and in the absent of the two temperature parameter. The distribu- tions of all the unknown fields , , and are affected slightly according to the changes in the relaxa- tion time. e The removed peaks in Figures 11 and 12 of the strain distribution due to the presence of the two temperature parameter. respectively in the Laplace transformed domain. Figures 13-20, illustrate the effects of change in time Copyright © 2013 SciRes. ENG 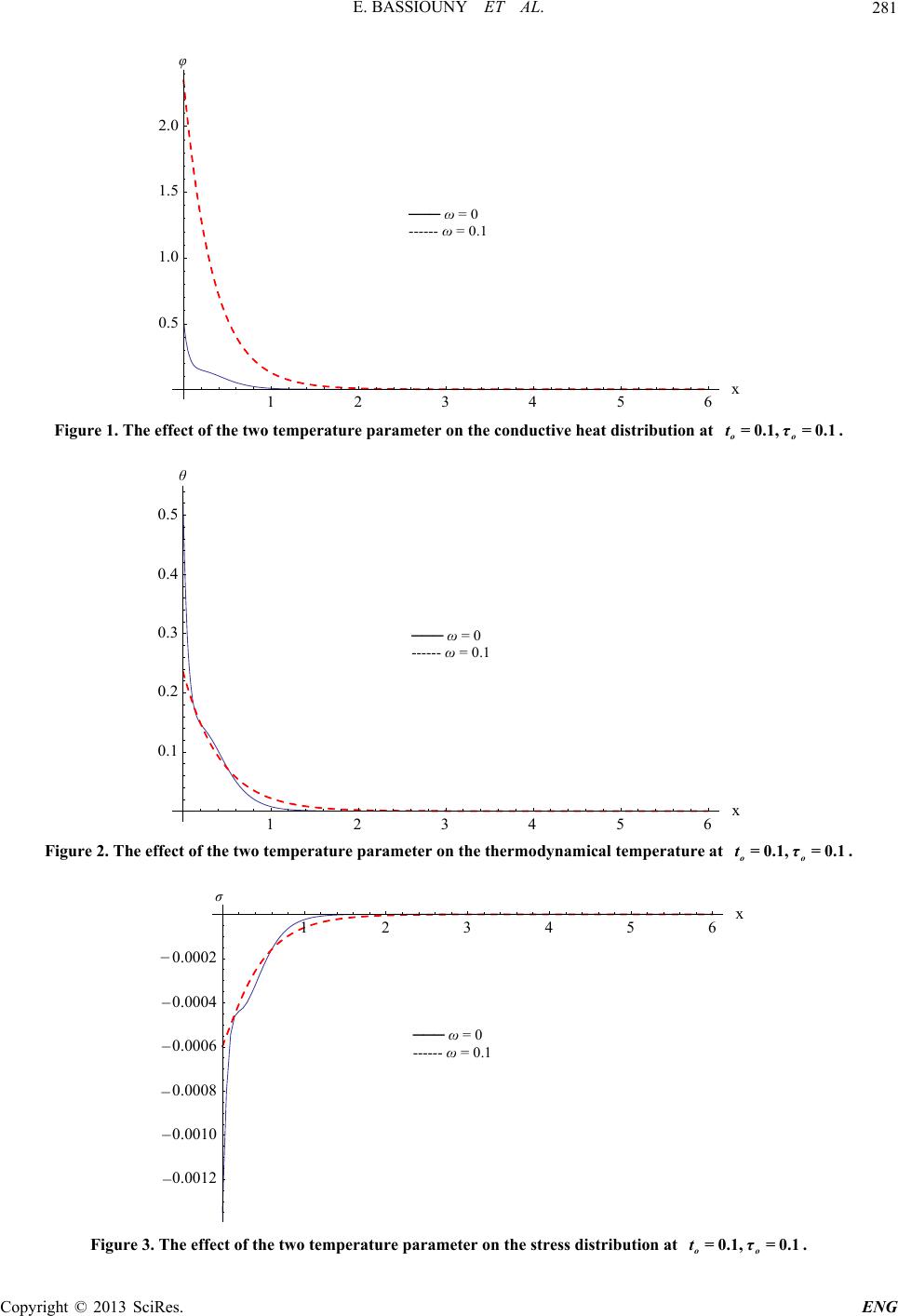 E. BASSIOUNY ET AL. Copyright © 2013 SciRes. ENG 281 φ ___ 0 0.1 1 2 3 45 6x 0.5 1.0 1.5 2.0 ── ω = 0 ------ ω = 0.1 Figure 1. The effec t of the two tempera ture parameter on the conductive he at distribution at . =0.1, =0.1 oo tτ θ ___ 0 0.1 0.1 0.2 0.3 0.4 0.5 ── ω = 0 ------ ω = 0.1 Figure 2. The effect of the two temperature parameter on the thermodynamical temperature at . =0.1, =0.1 oo tτ σ ___ 0 0.1 123456 0.0012 0.0010 0.0008 0.0006 0.0004 0.0002 ── ω = 0 ------ ω = 0.1 − − − − − − Figure 3. The effect of the two temperature parameter on the stress distribution at . =0.1, =0.1 oo tτ 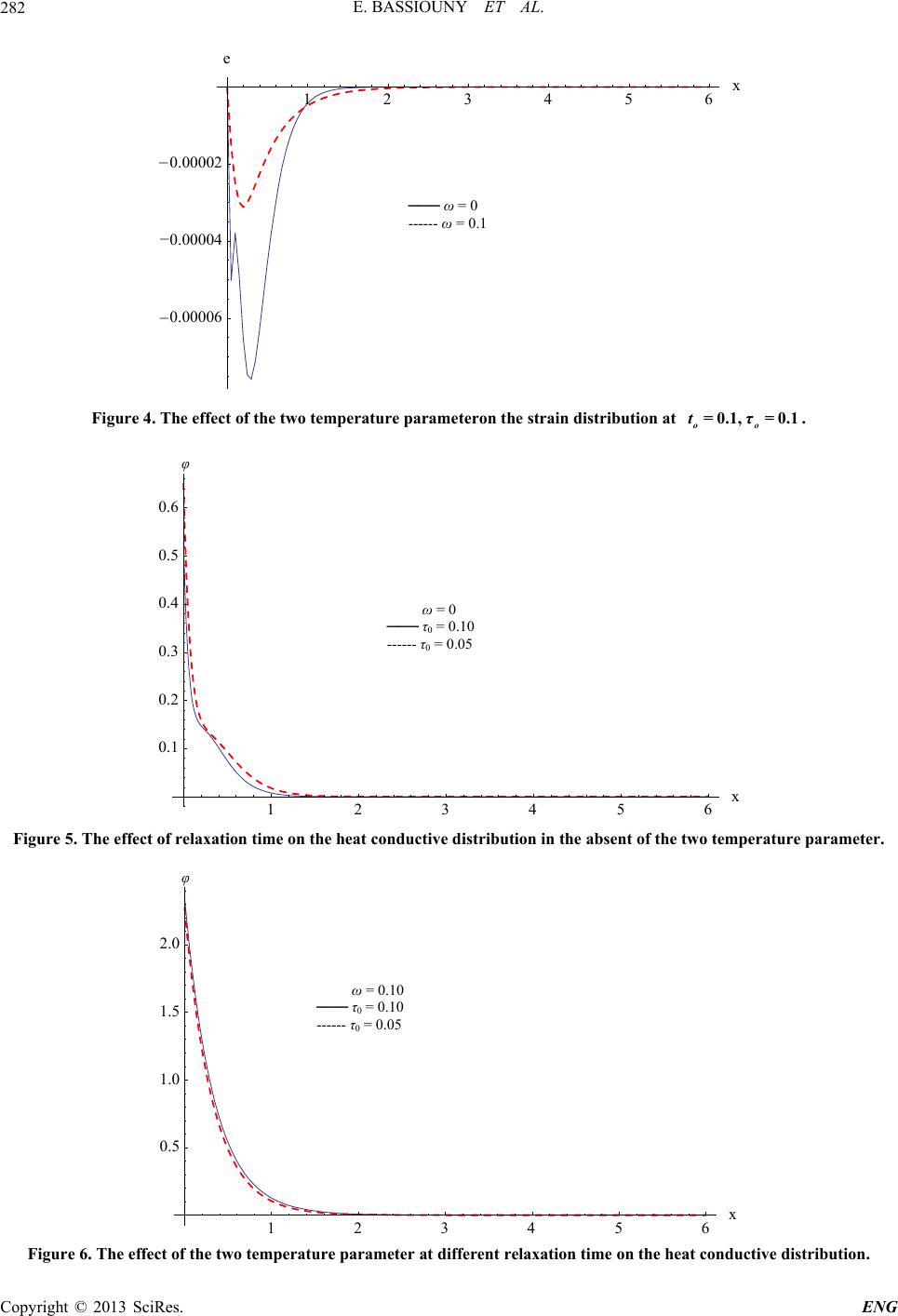 E. BASSIOUNY ET AL. 282 ___ 0 0.1 1 23 45 6 0.00006 0.00004 0.00002 e ── ω = 0 ------ ω = 0.1 − − − Figure 4. The effect of the two temperature parameteron the strain distribution at . =0.1, =0.1 oo tτ φ 0 ــــــــــــــ 0 0.10 0 0.05 1 2 3 45 6x 0.1 0.2 0.3 0.4 0.5 0.6 ω = 0 ── τ 0 = 0.10 ------ τ 0 = 0.05 Figure 5. The effect of relaxation time on the heat conductive distribution in the absent of the two temperature parameter. φ 0.10 ــــــــــــــ 0 0.10 0 0.05 x 0.5 1.0 1.5 .0 ω = 0.10 ── τ0 = 0.10 ------ τ0 = 0.05 Figure 6. The effect of the two temperature parameter at different relaxation time on the heat conductive distribution. Copyright © 2013 SciRes. ENG 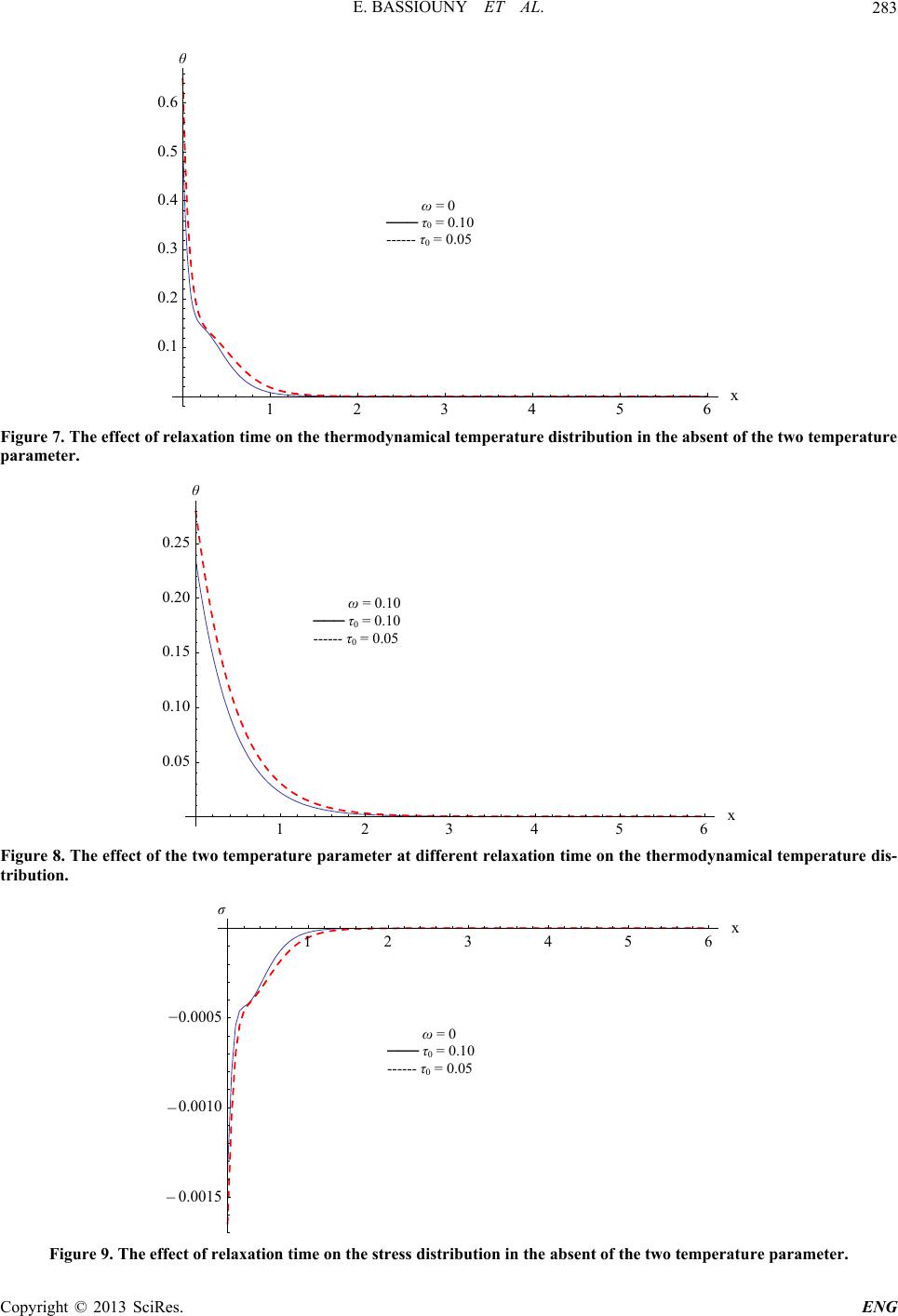 E. BASSIOUNY ET AL. 283 θ 0 ــــــــــــــ 0 0.10 0 0.05 1 2 3 45 6x 0.1 0.2 0.3 0.4 0.5 0.6 ω = 0 ── τ 0 = 0.10 ------ τ 0 = 0.05 Figure 7. The effect of relaxation time on the thermodynamical temperature distribution in the absent of the two temperature parameter. θ 0.10 ــــــــــــــ 0 0.10 0 0.05 1 23456 .05 .10 .15 .20 .25 ω = 0.10 ── τ 0 = 0.10 ------ τ 0 = 0.05 Figure 8. The effect of the two temperature parameter at different relaxation time on the thermodynamical temperature dis- tribution. σ 0 ــــــــــــــ 0 0.10 0 0.05 1 2 3 4 5 6x 0.0015 0.0010 0.0005 ω = 0 ── τ 0 = 0.10 ------ τ 0 = 0.05 − − − Figure 9. The effect of relaxation time on the stress distribution in the absent of the two temperature parameter. Copyright © 2013 SciRes. ENG 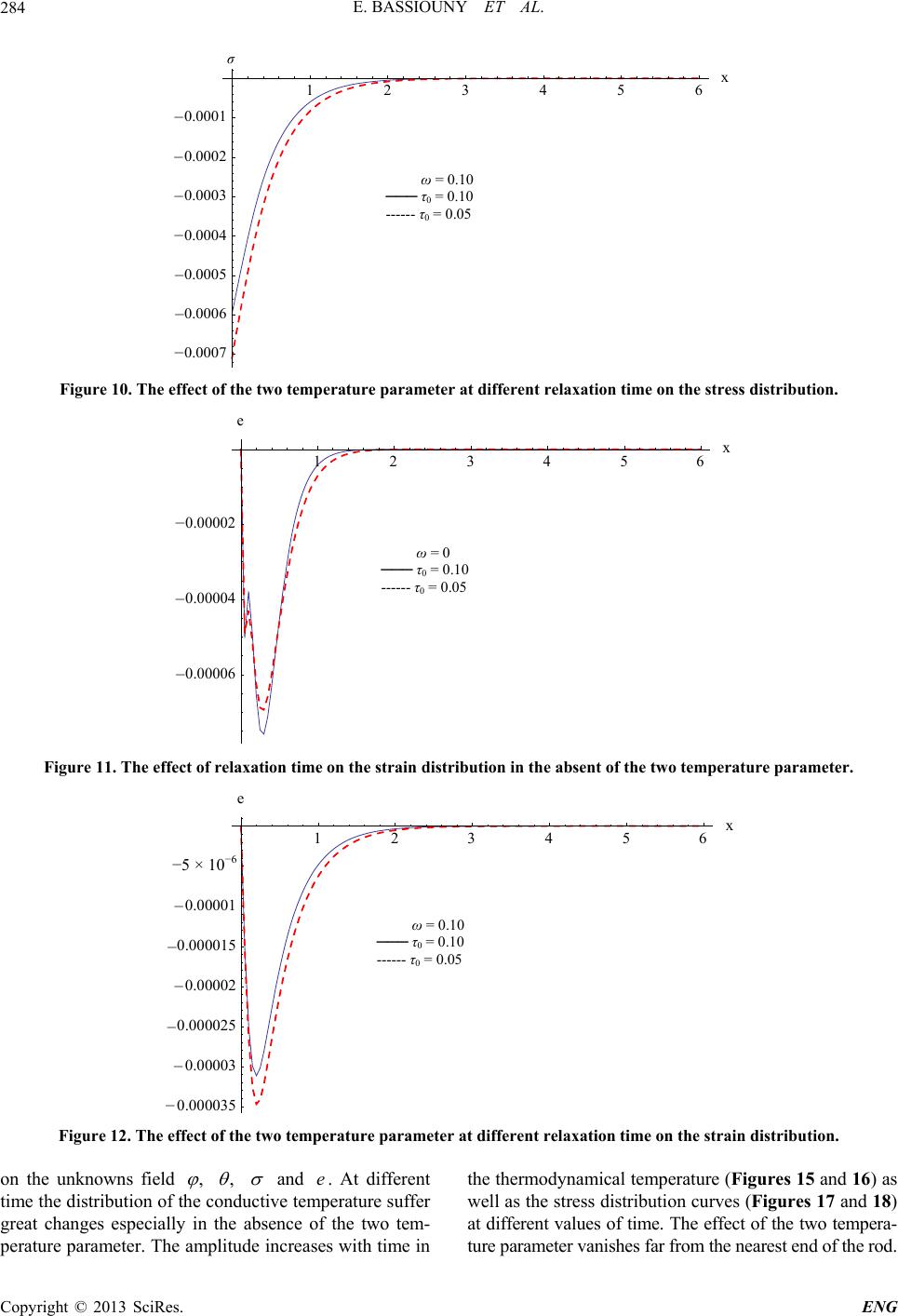 E. BASSIOUNY ET AL. Copyright © 2013 SciRes. ENG 284 σ 0.10 ــــــــــــــ 0 0.10 0 0.05 1 2 3 4 5 6x 0.0007 0.0006 0.0005 0.0004 0.0003 0.0002 0.0001 ω = 0.10 ── τ 0 = 0.10 ------ τ 0 = 0.05 − − − − − − − Figure 10. The effect of the two temperature parameter at different relaxation time on the stress distribution. 0 ــــــــــــــ 0 0.10 0 0.05 1 23 45 6x 0.00006 0.00004 0.00002 e ω = 0 ── τ 0 = 0.10 ------ τ 0 = 0.05 − − − Figure 11. The effect of relaxation time on the strain distribution in the absent of the two temperature parameter. 0.10 ــــــــــــــ 0 0.10 0 0.05 1 23 4 56 0.000035 0.00003 0.000025 0.00002 0.000015 0.00001 5. 10 6 e ω = 0.10 ── τ 0 = 0.10 ------ τ 0 = 0.05 − − − − − − −5 × 10 −6 Figure 12. The effect of the two temperature parameter at different relaxation time on the strain distribution. on the unknowns field , , and . At different time the distribution of the conductive temperature suffer great changes especially in the absence of the two tem- perature parameter. The amplitude increases with time in the thermodynamical temperature (Figures 15 and 16) as well as the stress distribution curves (Figures 17 and 18) at different values of time. The effect of the two tempera- ure parameter vanishes far from the nearest end of the rod. e t 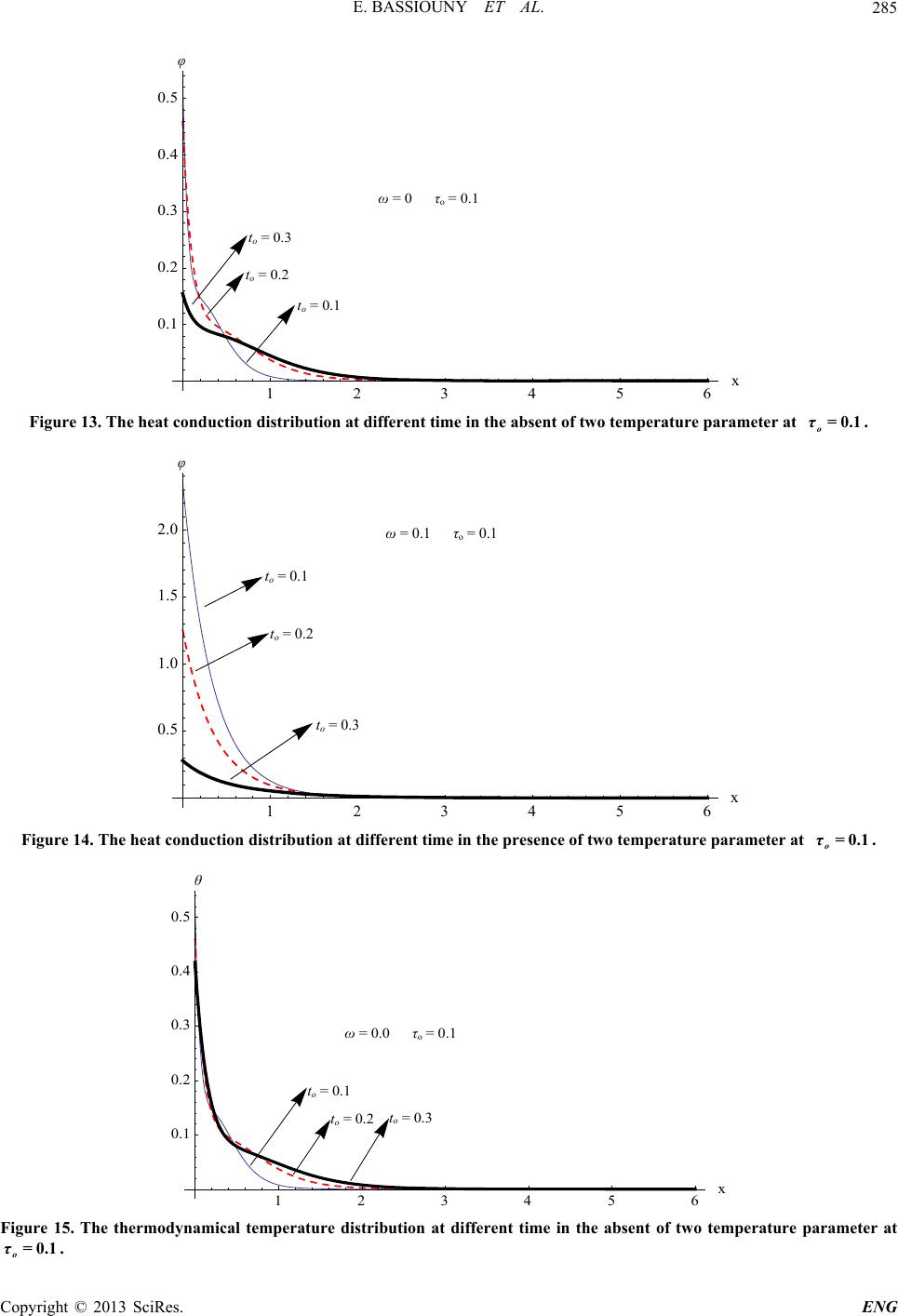 E. BASSIOUNY ET AL. 285 φ =0.0 to=0.1 to=0.2 to= 0. 3 o=0.1 1 2 3 456x 0.1 0.2 0.3 0.4 0.5 t o = 0.1 ω = 0 τ o = 0.1 t o = 0.2 t o = 0.3 Figure 13. The heat conduction distribution at different time in the absent of two temperature parameter at . =0.1 o τ φ =0. to = 0.3 to=0 .2 to=0 .1 .1 o=0.1 1 2 3 456x 0.5 1.0 1.5 .0 t o = 0.1 ω = 0.1 τ o = 0.1 t o = 0.2 t o = 0.3 Figure 14. The heat conduction distribution at different time in the presence of two temperature parameter at . =0.1 o τ θ to =0 .3 to=0.2 to =0 .1 =0.0 o=0.1 123456x 0.1 0.2 0.3 0.4 0.5 t o = 0.1 ω = 0.0 τ o = 0.1 t o = 0.2t o = 0.3 Figure 15. The thermodynamical temperature distribution at different time in the absent of two temperature parameter at . =0.1 o τ Copyright © 2013 SciRes. ENG 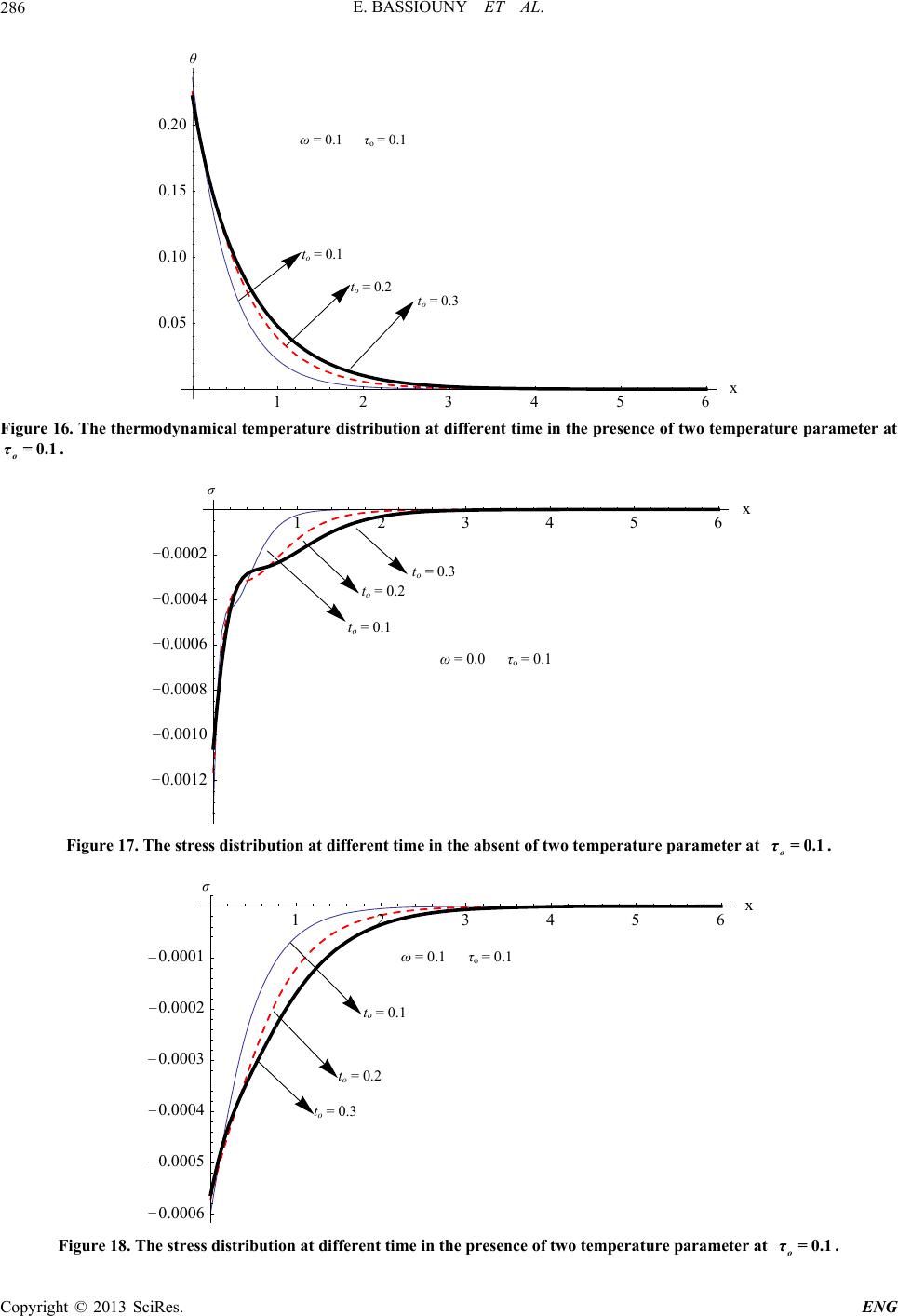 E. BASSIOUNY ET AL. 286 θ to=0.3 to=0.2 to=0.1 =0.1 o=0.1 1 234 56x .05 .10 .15 .20 t o = 0.1 ω = 0.1 τ o = 0.1 t o = 0.2 t o = 0.3 Figure 16. The thermodynamical temperature distribution at different time in the presence of two temperature parameter at . =0.1 o τ σ to =0.3 to =0.2 to =0.1 =0.0 o=0.1 1 2 3 4 5 6 0.0012 0.0010 0.0008 0.0006 0.0004 0.0002 t o = 0.1 ω = 0.0 τ o = 0.1 t o = 0.2 t o = 0.3 − − − − − − Figure 17. The stress distribution at different time in the absent of two temperature parameter at . =0.1 o τ σ =0.1 to= 0.1 to= 0.2 to= 0.3 o=0.1 123456x 0.0006 0.0005 0.0004 0.0003 0.0002 0.0001 t o = 0.1 ω = 0.1 τ o = 0.1 t o = 0.2 t o = 0.3 − − − − − − Figure 18. The stress distribution at different time in the presence of two temperature parameter at . =0.1 o τ Copyright © 2013 SciRes. ENG 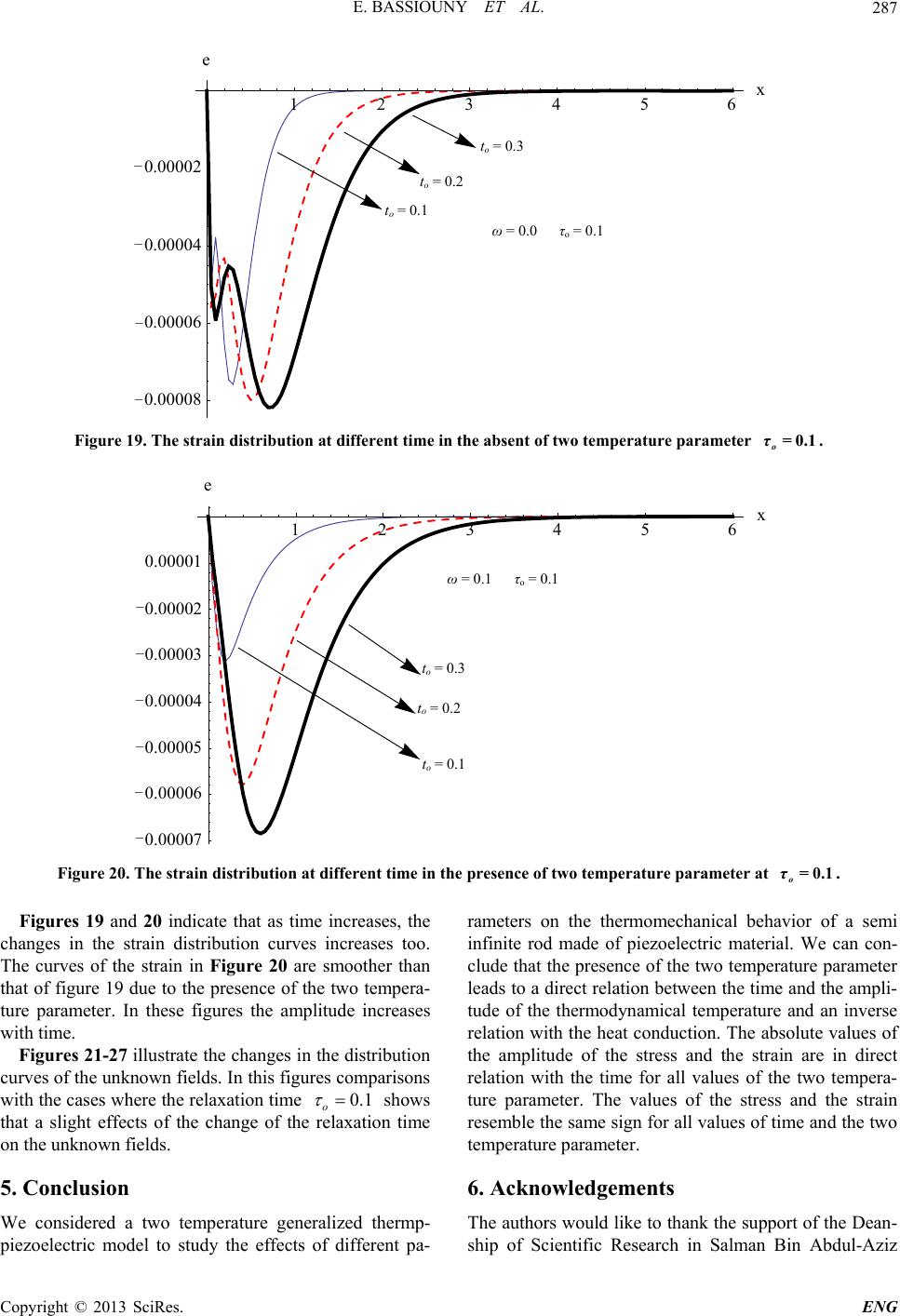 E. BASSIOUNY ET AL. Copyright © 2013 SciRes. ENG 287 =0. 0 to = 0.3 to = 0.2 to=0 .1 o=0.1 1 2 3 45 6x 0.00008 0.00006 0.00004 0.00002 e t o = 0.1 ω = 0.0 τ o = 0.1 t o = 0.2 t o = 0.3 − − − − Figure 19. The strain distribution at different time in the absent of two temperature parameter . =0.1 o τ =0.1 to = 0 .2 to = 0 .3 o=0.1 to=0 .1 1 23 45 6x 0.00007 0.00006 0.00005 0.00004 0.00003 0.00002 0.00001 e t o = 0.1 ω = 0.1 τ o = 0.1 t o = 0.2 t o = 0.3 − − − − − − Figure 20. The strain distribution at different time in the presence of two temperature parameter at . =0.1 o τ Figures 19 and 20 indicate that as time increases, the changes in the strain distribution curves increases too. The curves of the strain in Figure 20 are smoother than that of figure 19 due to the presence of the two tempera- ture parameter. In these figures the amplitude increases with time. Figures 21-27 illustrate the changes in the distribution curves of the unknown fields. In this figures comparisons with the cases where the relaxation time 0.1 o shows that a slight effects of the change of the relaxation time on the unknown fields. 5. Conclusion We considered a two temperature generalized thermp- piezoelectric model to study the effects of different pa- rameters on the thermomechanical behavior of a semi infinite rod made of piezoelectric material. We can con- clude that the presence of the two temperature parameter leads to a direct relation between the time and the ampli- tude of the thermodynamical temperature and an inverse relation with the heat conduction. The absolute values of the amplitude of the stress and the strain are in direct relation with the time for all values of the two tempera- ture parameter. The values of the stress and the strain resemble the same sign for all values of time and the two temperature parameter. 6. Acknowledgements The authors would like to thank the support of the Dean- hip of Scientific Research in Salman Bin Abdul-Aziz s 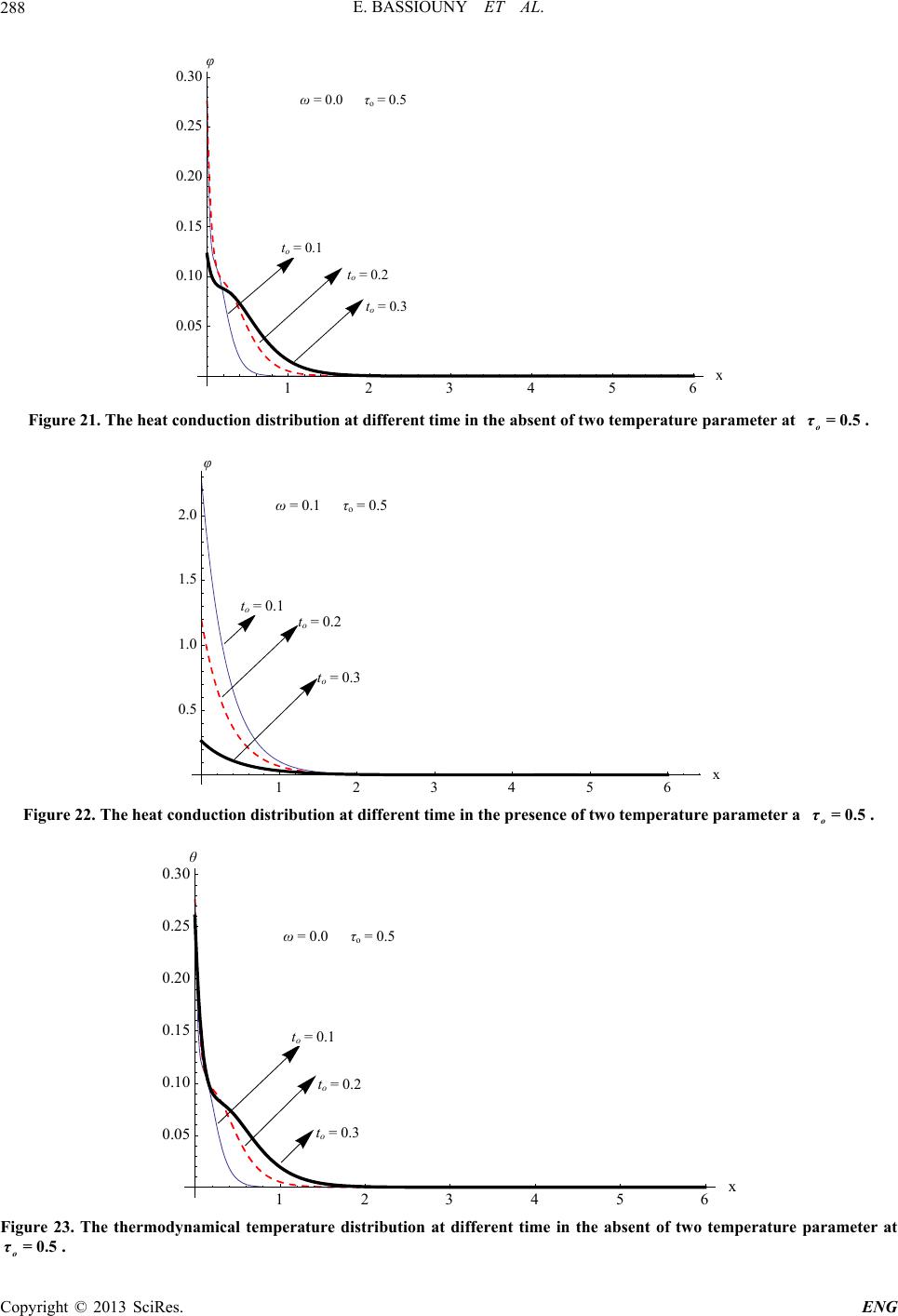 E. BASSIOUNY ET AL. 288 φ =0.0 o=0.5 to=0.2 to=0.3 to=0.1 12 3 45 6 0.05 0.10 0.15 0.20 0.25 0.30 to = 0.1 ω = 0.0 τo = 0.5 to = 0.2 to = 0.3 Figure 21. The heat conduction distribution at different time in the absent of two temperature parameter at . o τ=0.5 φ =0.1 o=0.5 to=0.1 to=0.2 to =0 .3 1 23 4 56x 0.5 1.0 1.5 2.0 t o = 0.1 ω = 0.1 τ o = 0.5 t o = 0.2 t o = 0.3 Figure 22. The heat conduction distribution at different time in the presence of two temperature parameter a . o τ=0.5 θ =0.0 o=0.5 to=0.1 to=0.2 to=0.3 12 34 5 6 0.05 0.10 0.15 0.20 0.25 0.30 t o = 0.1 ω = 0.0 τ o = 0.5 t o = 0.2 t o = 0.3 Figure 23. The thermodynamical temperature distribution at different time in the absent of two temperature parameter at . o τ=0.5 Copyright © 2013 SciRes. ENG 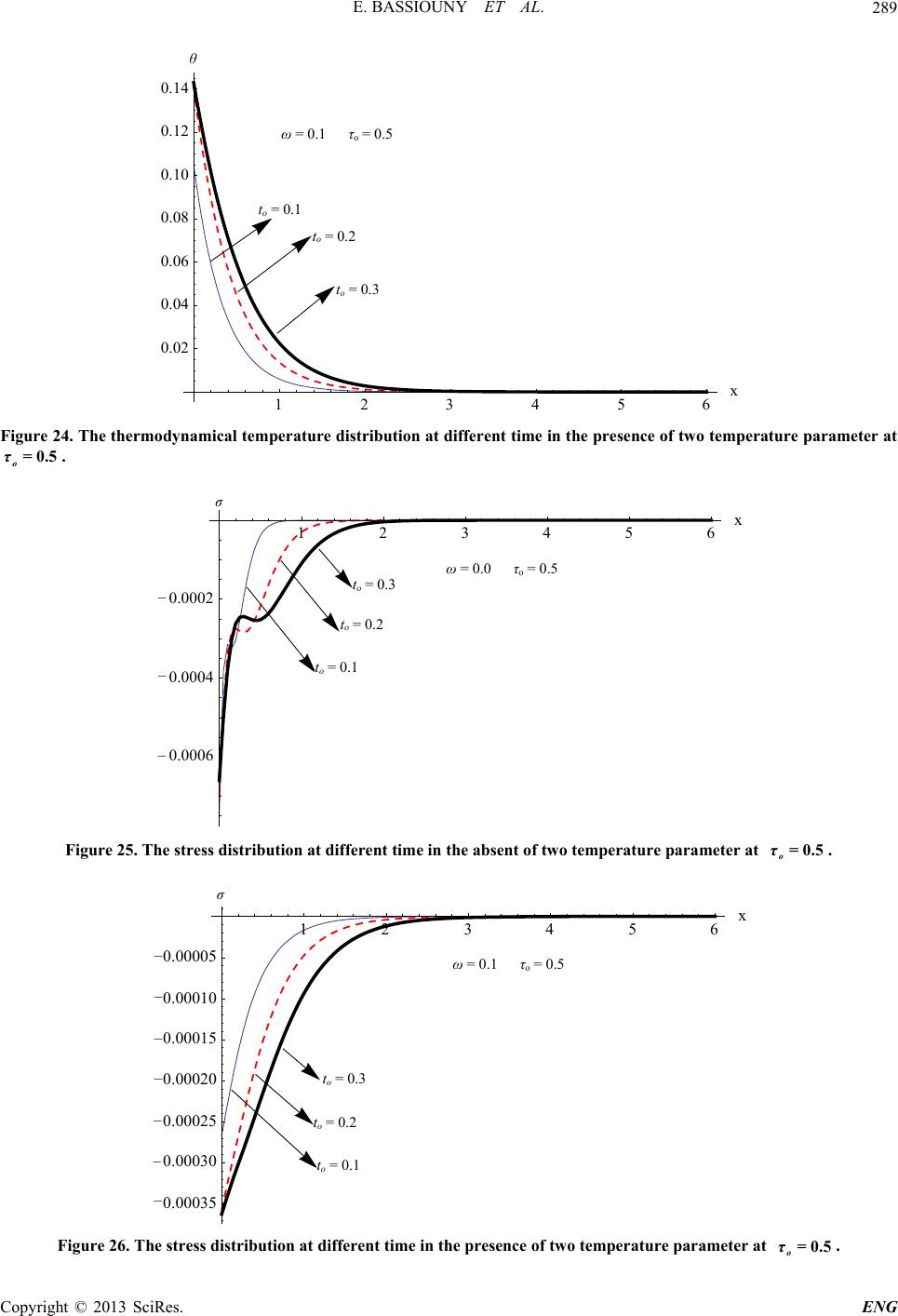 E. BASSIOUNY ET AL. 289 θ =0.1 o=0.5 to=0.1 to=0.2 to=0.3 1 234 56 0.02 0.04 0.06 0.08 0.10 0.12 0.14 t o = 0.1 ω = 0.1 τ o = 0.5 t o = 0.2 t o = 0.3 Figure 24. The thermodynamical temperature distribution at different time in the presence of two temperature parameter at . o τ=0.5 σ =0.0 o=0.5 to=0. 1 to = 0.2 to= 0.3 1 2 3 4 5 6x 0.0006 0.0004 0.0002 t o = 0.1 ω = 0.0 τ o = 0.5 t o = 0.2 t o = 0.3 − − − Figure 25. The stress distribution at different time in the absent of two temperature parameter at . o τ=0.5 σ =0.1 o=0.5 to=0. 3 to=0. 2 to =0. 1 1 23 456 0.00035 0.00030 0.00025 0.00020 0.00015 0.00010 0.00005 t o = 0.1 ω = 0.1 τ o = 0.5 t o = 0.2 t o = 0.3 − − − − − − − Figure 26. The stress distribution at different time in the presence of two temperature parameter at . o τ=0.5 Copyright © 2013 SciRes. ENG 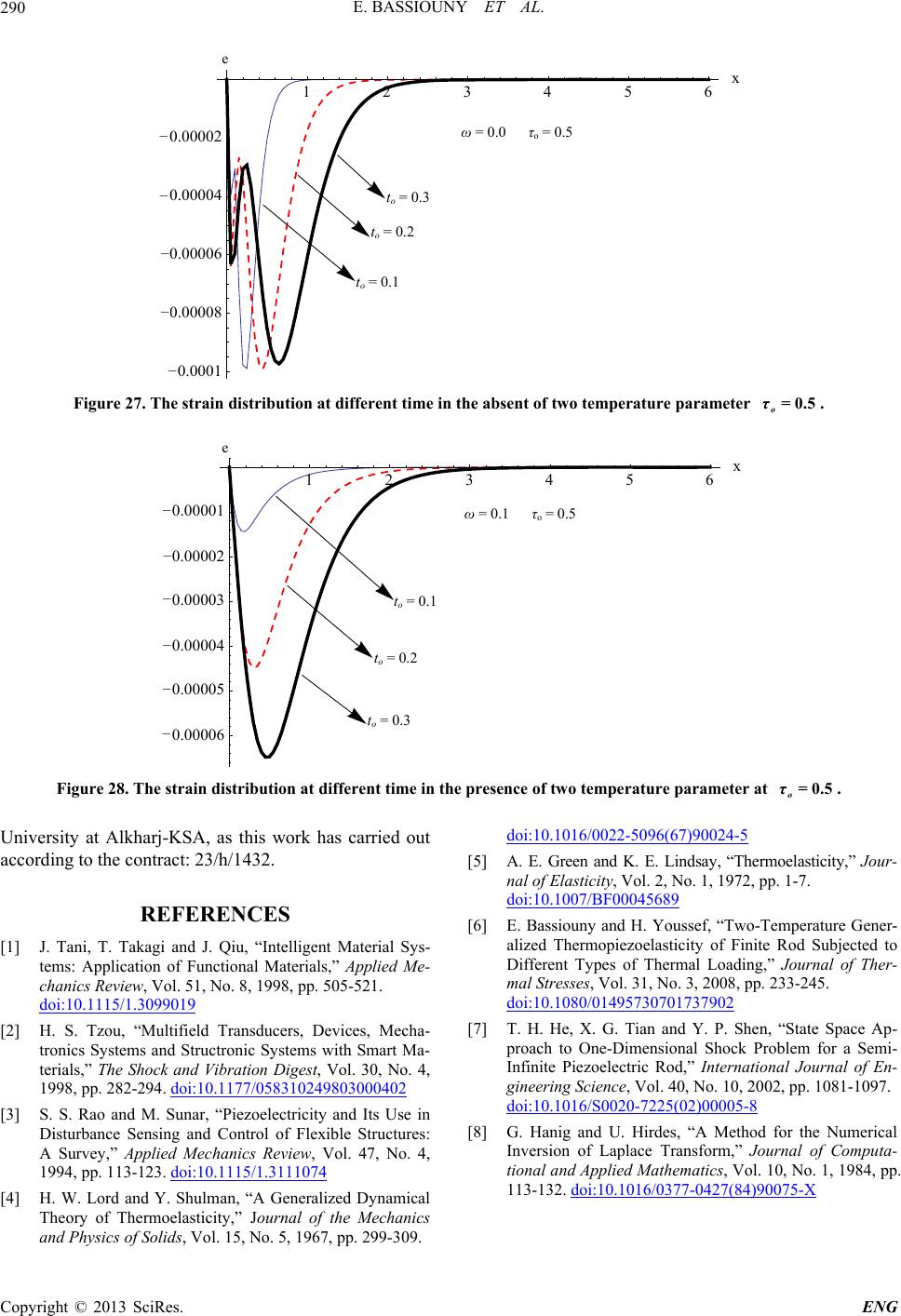 E. BASSIOUNY ET AL. Copyright © 2013 SciRes. ENG 290 e =0.0 o=0.5 to=0. 3 to = 0.2 to=0. 1 1 234 5 6x 0.0001 0.00008 0.00006 0.00004 0.00002 t o = 0.1 ω = 0.0 τ o = 0.5 t o = 0.2 t o = 0.3 − − − − − Figure 27. The strain distribution at different time in the absent of two temperature parameter . o τ=0.5 e =0.1 o=0.5 to=0.1 to=0.2 to=0.3 12 3 4 5 6x 0.00006 0.00005 0.00004 0.00003 0.00002 0.00001 t o = 0.1 ω = 0.1 τ o = 0.5 t o = 0.2 t o = 0.3 − − − − − − Figure 28. The strain distribution at different time in the presence of two temperature parameter at . o τ=0.5 University at Alkharj-KSA, as this work has carried out according to the contract: 23/h/1432. REFERENCES [1] J. Tani, T. Takagi and J. Qiu, “Intelligent Material Sys- tems: Application of Functional Materials,” Applied Me- chanics Review, Vol. 51, No. 8, 1998, pp. 505-521. doi:10.1115/1.3099019 [2] H. S. Tzou, “Multifield Transducers, Devices, Mecha- tronics Systems and Structronic Systems with Smart Ma- terials,” The Shock and Vibration Digest, Vol. 30, No. 4, 1998, pp. 282-294. doi:10.1177/058310249803000402 [3] S. S. Rao and M. Sunar, “Piezoelectricity and Its Use in Disturbance Sensing and Control of Flexible Structures: A Survey,” Applied Mechanics Review, Vol. 47, No. 4, 1994, pp. 113-123. doi:10.1115/1.3111074 [4] H. W. Lord and Y. Shulman, “A Generalized Dynamical Theory of Thermoelasticity,” Journal of the Mechanics and Physics of Solids, Vol. 15, No. 5, 1967, pp. 299-309. doi:10.1016/0022-5096(67)90024-5 [5] A. E. Green and K. E. Lindsay, “Thermoelasticity,” Jour- nal of Elasticity, Vol. 2, No. 1, 1972, pp. 1-7. doi:10.1007/BF00045689 [6] E. Bassiouny and H. Youssef, “Two-Temperature Gener- alized Thermopiezoelasticity of Finite Rod Subjected to Different Types of Thermal Loading,” Journal of Ther- mal Stresses, Vol. 31, No. 3, 2008, pp. 233-245. doi:10.1080/01495730701737902 [7] T. H. He, X. G. Tian and Y. P. Shen, “State Space Ap- proach to One-Dimensional Shock Problem for a Semi- Infinite Piezoelectric Rod,” International Journal of En- gineering Science, Vol. 40, No. 10, 2002, pp. 1081-1097. doi:10.1016/S0020-7225(02)00005-8 [8] G. Hanig and U. Hirdes, “A Method for the Numerical Inversion of Laplace Transform,” Journal of Computa- tional and Applied Mathematics, Vol. 10, No. 1, 1984, pp. 113-132. doi:10.1016/0377-0427(84)90075-X  E. BASSIOUNY ET AL. 291 Nomenclature ij The components of relaxation time. a The two-temperature parameter. C c Specific heat at constant strain. ijkl The elastic constants. 2 o c Longitudinal wave speed. i D d The components of electric displacement. i E The pyroelectric constants. i e The components of electric field vector. ijkl h The components of strain tensor. ijk k The piezoelectric coefficients. ij q The components of thermal conductivity. i T The components of the heat flux vector. Absolute temperature. o Time. T t Reference temperature. o t u Ramping time parameter. i v Components of displacement vector. i The electric potential function. 2 o T Dimensionless thermoelastic coupling con- stant. T Coefficient of linear thermal expansion. ik The components of dielectric tensor. ij The thermal modulus. 32 T . The angular frequency of thermal vibration. ij Kronecker delta function. C Dimensionless mechanical coupling constant. The entropy density. C k The thermal viscosity. o C CT o TT The dynamical temperature increment such that 1 o o TT T . , Lamé’s constants. Mass density. ij Components of stress tensor. x The principal stress component. o One relaxation time parameter. Copyright © 2013 SciRes. ENG
|