Paper Menu >>
Journal Menu >>
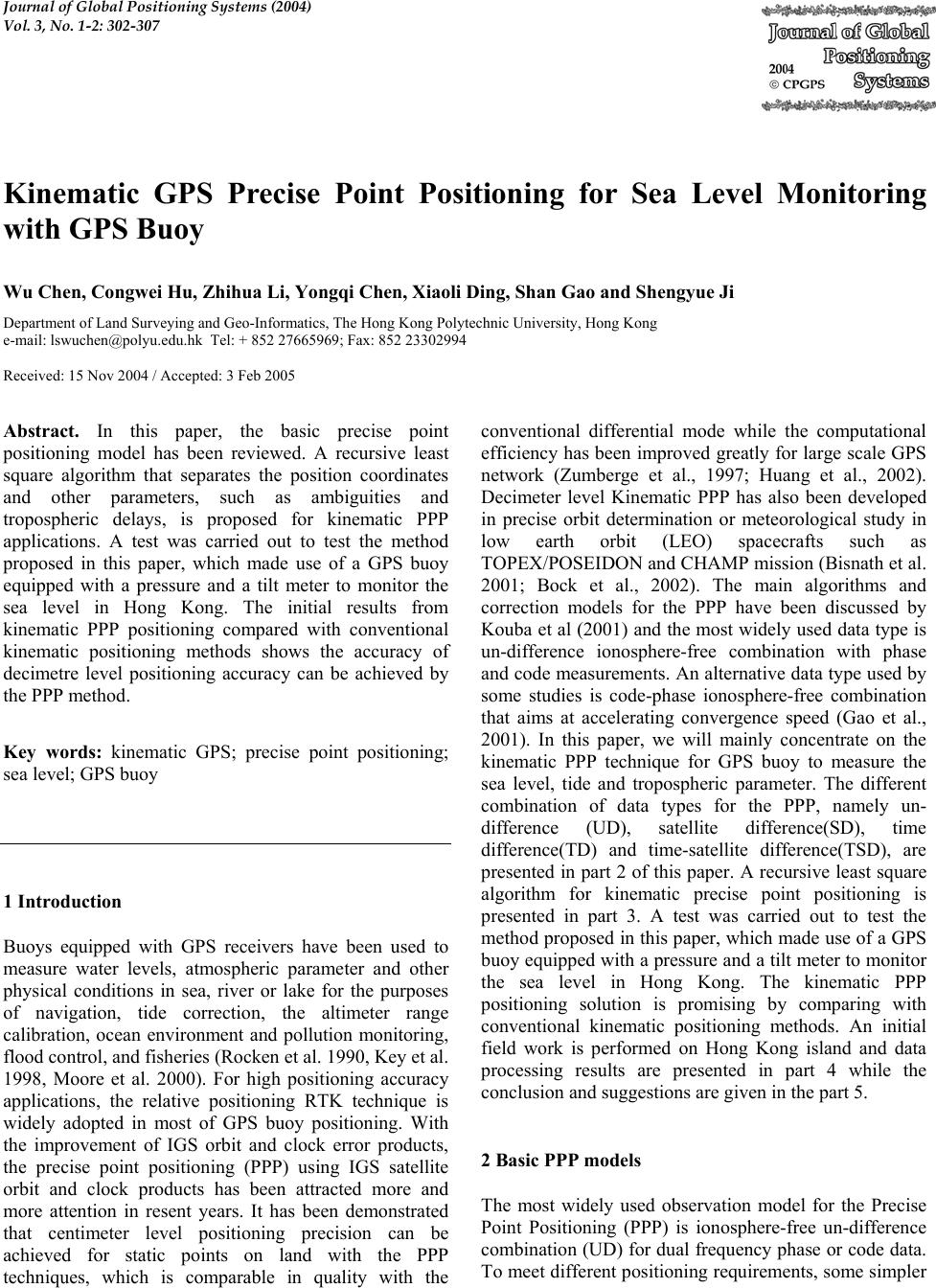 Journal of Global Positioning Systems (2004) Vol. 3, No. 1-2: 302-307 Kinematic GPS Precise Point Positioning for Sea Level Monitoring with GPS Buoy Wu Chen, Congwei Hu, Zhihua Li, Yongqi Chen, Xiaoli Ding, Shan Gao and Shengyue Ji Department of Land Surveying and Geo-Informatic s , The Hong Kong Polytechnic University, H on g K on g e-mail: lswuchen@poly u.e du .h k T el : + 85 2 27 66 5969; Fax: 852 23302994 Received: 15 Nov 2004 / Accepted: 3 Feb 2005 Abstract. In this paper, the basic precise point positioning model has been reviewed. A recursive least square algorithm that separates the position coordinates and other parameters, such as ambiguities and tropospheric delays, is proposed for kinematic PPP applications. A test was carried out to test the method proposed in this paper, which made use of a GPS buoy equipped with a pressure and a tilt meter to monitor the sea level in Hong Kong. The initial results from kinematic PPP positioning compared with conventional kinematic positioning methods shows the accuracy of decimetre level positioning accuracy can be achieved by the PPP method. Key words: kinematic GPS; precise point positioning; sea level; GPS buoy 1 Introduction Buoys equipped with GPS receivers have been used to measure water levels, atmospheric parameter and other physical conditions in sea, river or lake for the purposes of navigation, tide correction, the altimeter range calibration, ocean environment and pollution monitoring, flood control, and fisheries (Rocken et al. 1990, Key et al. 1998, Moore et al. 2000). For high positioning accuracy applications, the relative positioning RTK technique is widely adopted in most of GPS buoy positioning. With the improvement of IGS orbit and clock error products, the precise point positioning (PPP) using IGS satellite orbit and clock products has been attracted more and more attention in resent years. It has been demonstrated that centimeter level positioning precision can be achieved for static points on land with the PPP techniques, which is comparable in quality with the conventional differential mode while the computational efficiency has been improved greatly for large scale GPS network (Zumberge et al., 1997; Huang et al., 2002). Decimeter level Kinematic PPP has also been developed in precise orbit determination or meteorological study in low earth orbit (LEO) spacecrafts such as TOPEX/POSEIDON and CHAMP mission (Bisnath et al. 2001; Bock et al., 2002). The main algorithms and correction models for the PPP have been discussed by Kouba et al (2001) and the most widely used data type is un-difference ionosphere-free combination with phase and code measurements. An alternative data type used by some studies is code-phase ionosphere-free combination that aims at accelerating convergence speed (Gao et al., 2001). In this paper, we will mainly concentrate on the kinematic PPP technique for GPS buoy to measure the sea level, tide and tropospheric parameter. The different combination of data types for the PPP, namely un- difference (UD), satellite difference(SD), time difference(TD) and time-satellite difference(TSD), are presented in part 2 of this paper. A recursive least square algorithm for kinematic precise point positioning is presented in part 3. A test was carried out to test the method proposed in this paper, which made use of a GPS buoy equipped with a pressure and a tilt meter to monitor the sea level in Hong Kong. The kinematic PPP positioning solution is promising by comparing with conventional kinematic positioning methods. An initial field work is performed on Hong Kong island and data processing results are presented in part 4 while the conclusion and suggestions are given in the part 5. 2 Basic PPP models The most widely used observation model for the Precise Point Positioning (PPP) is ionosphere-free un-difference combination (UD) for dual frequency phase or code data. To meet different positioning requirements, some simpler  Chen et al.: Kinematic GPS Precise Point Positioning for Sea Level Monitoring with GPS Buoy 303 combinations from UD can be formed. For simplicity, only carrier phase data are used and the correlation matrix form will not be presented here. For centimetre precision positioning, some related error corrections have to be applied, such as the relativity, satellite phase centre offset, satellite wind up, earth body tide, ocean load correction etc. ( Kouba,2000 ) which will not b e discussed here. The UD data type is formed by combination of dual frequency ionosphere-free GPS data (Holfman-Wellenhof el al 2002, Kouba J et al 2001,Han et al 2001). It takes the form of ερ +++−+= )())()(()()( tTrNtdttdtcttUD kkk r kk (1) where UD - ionosphere-free carrier phase observation (m), ρ - geocentric topocentric distance for satellite, N - real valued ionosphere-free carrier phase ambiguity, )(tdtr - clock error of receiver r, )(tdtk - clock error of satellite k, )(tTrk - tropospheric delay, t - epoch time, c - speed of light, r - subscript for receiver station identifier, k - superscript for satellite identifier, ε - measurement noise. The tropospheric delay can be expressed as a function of zenith path delay and a mapping function ερ +++−+= )()())()(()()( tTzmNtdttdtcttUDr kkk r kk (2) where )(zmk is the mapping function, e.g. Neil mapping function (Niell, 1996), z is the zenith of the satellite and )(tTr is the zenith tropospheric path delay. Therefore, parameters to be estimated with the UD model for the PPP positioning are station position coordinates (X,Y,Z), receiver clock )(tdtr, ambiguity N and tropospheric zenith p ath delay )(tTr. Whether in static or kinematic positioning, the receiver clock error is an epoch by epoch unknown parameter. The ambiguity is a real valued constant over time. As the troposphere changes very slowly over time, the tropospheric zenith path delay can be treated as a constant parameter within short period time, such as 1 hour interval or 15-minute interval. On the other side, because the receiver clock parameters and the ambiguity parameters are correlated, to estimate the absolute epoch by epoch receiver clock errors, code data has to be added to overcome the deficit of the normal equation matrix with a small weight. Otherwise a reference satellite has to be assigned in data processing, and in this way, only a relative receiver clock error can be obtained. Based on the UD model, some combinations can be formed as to eliminate some of common parameters in an epoch or between epochs. Namely the satellite difference (SD), time difference (TD) and time and satellite difference (TSD) can be formed between satellite k and l or between epochs i and j or both. The definitions of these combinations can be as: )()()( tUDtUDtSD klkl −= (3) )()()( i k j kk tUDtUDtTD−= (4) )()()( i kl j klkl tSDtSDtTSD −= (5) From Eq. (3), the epoch by epoch receiver clock parameters are canceled out in the SD model. Only position, ambiguity and tropospheric parameters are remained. Compared with the UD model, the total parameters to be estimated reduced dramatically. While in the TD model (Eq. (4)), there are no ambiguity parameters left as the ambiguity is a constant over time as long as there are no cycle slips or loss of lock. The receiver clock parameters are transformed to clock difference between subsequent epochs. It can also be expressed as the clock difference relative to first epoch. Even though the ambiguities are removed in the TD model, the parameters to be estimated are far more than those in the SD model because of the epoch by epoch receiver clock difference parameters. In the TSD model (Eq. (5)), both receiver and ambiguity parameters are eliminated, only position components and tropospheric zenith delay parameters remain in the observation model. However, the TD and TSD models only provide distance change information (similar to Doppler measurements) and it may need longer periods for the position solution to be convergent. 3 A recursiv e l e a s t s q u a re a lgorith m fo r kinematic PPP In our approach, we will use the UD and SD data models for the kinematic PPP data processing. The Kalman filtering method has been widely used for kinematic GPS data processing. To apply the Kalman filtering algorithms, it required to establish a dynamic model to describe the relationship of the estimated parameters in different epochs and the constant velocity or acceleration models are commonly used. However, with some  304 Journal of Global Positioning Systems applications, such as GPS buoys, the above models cannot be used to describe the motion of the GPS receiver. In this paper a recursive least square method is proposed to separate the ambiguity and position parameters. Assuming that there are two kinds of parameters to be estimated as X and Y, the observation equation can be written as PVLBYAX ,+=+ (6) where X is a vector for coordinate, receiver clock parameters which need to be estimated at each epoch. Y is a vector for ambiguity, zenith tropospheric parameter which does change rapidly between epochs. P is the weight matrix. The algorithm used in this paper tries to simplify the observation equation by eliminating parameter X in the observation equation (Eq. (6)). The normal equation for Eq. (6) can be written as: ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ PLB PLA NN NN PBBPAB PBAPAA T T TT TT 2221 1211 (7) with ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −IZ I0,and 1 1121 − =NNZ (8) ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −PLB PLA N NN NN NN IZ I T T 22 1211 2221 1211 0 0 PBAPANBPBBN TTT 1 1122 − −= (9) Assuming PAANJ T1 11 − = (10) we have BJIPJIBN TT )()( 22 −−= (11) with BJIB )( −= (12) Then we have new normal equation PLB Y B P BTT = This is equivalent to that we have a new observation equation PULYB,+= (13) In Eq. (13) only the parameter Y, such as ambiguity and tropospheric parameters are included while coordinate parameter X is eliminated. On the other hand, the observable L and its weight matrix keep unchanged. Therefore, in our algorithms, we will estimate the parameter Y first, together with a simple dynamic model to describe the ambiguity and tropospheric delays, by applying a Kalman filter. After parameter Y is determined, the parameter X (i.e. the station coordinates and receiver clock errors) can be estimated using the following equation. )( 12 1 11 YNPLANX T−= − (14) 4 Data processing results In this paper, two sets of data are used to demonstrate the positioning results using the algorithm proposed in the section 3. The first data set is static GPS data observed in Hong Kong. The d ata were observ ed on Mar ch 4, 2001 in Hong Kong GPS active network, totally 24 hours with 5 seconds observation interval. The data is processing in both state mode (to estimate one solution with all data available) and the kinematic mode (to estimate position every epoch). Figure 1 position errors in 3D with the static mode. It can be seen that it requires about 2 hours for the coordinate errors to reduce to less than 0.1 m. With 24 hour data, the coordinate difference compared with the known coordinate are 0.008m, -0.028m and - 0.001m in north, east and height components. In the kinematic mode, we solved for the ambiguities and tropospheric delay parameters first. Then the position coordinates are solved every epoch in a 5 second interval using Eq. (14). In data processing, the IGS precise orbit and 5 min satellite clock error data are used. As in the kinematic mode 5 second interval data is used, we use a linear interpolation of 5 minute satellite clock error to get the satellite clock errors at the epoch. Figure 2(a) shows the position errors with 5 second interval. The position RMS errors with 5 second interval d a ta are 0.0 37 m, 0.043 and 0.104m in North, East and Height component respectively. To assess the errors caused by the interpolation of satellite clock errors, we process the data again with 5 minute interval, with the epoch we have exact satellite clock errors as IGS provided. The positioning errors are shown in Figure 2(b). Comparing Figures 2(a) and (2(b), it can be seen that position errors with the epochs that have the exact IGS clock error (Figure 2(b)) are much less the solution with the interpolated satellite clock error (Figure 2(a)). The position RMS errors with the solution that is without using the clock interpolation are 0.021m,0.030m and 0.055m in North, East and Height component respectively. This clearly shows that the satellite clock accuracy plays an important role on the PPP method. To test the overall performance of the kinematic PPP method in a kinematic environment, we use GPS buoy data with 1s data interval, from 22 to 24 October 2004, at Repulse Bay, Hong Kong island. Two Leica SR530 dual frequency GPS receivers were used, one is set on shore as a fixed station for differential positioning test and another receiver is installed on a buoy in the sea. (Figure 3). Firstly we estimate the position of GPS buoy with the relative position mode. As the reference station is very close to the GPS buoy (a few hundred metres), most GPS measurement errors can be cancelled out by the relative 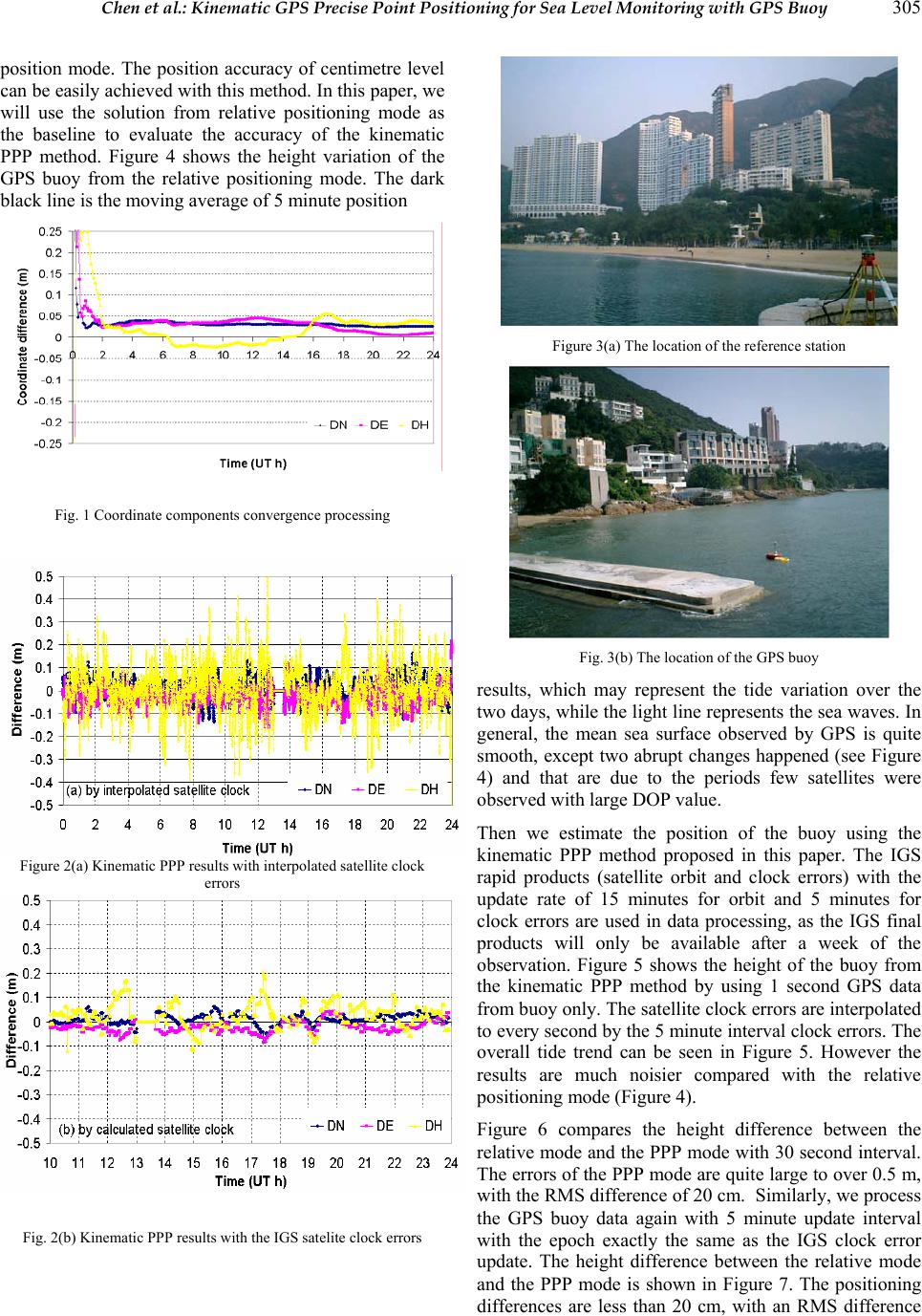 Chen et al.: Kinematic GPS Precise Point Positioning for Sea Level Monitoring with GPS Buoy 305 position mode. The position accuracy of centimetre level can be easily achieved with this method. In this paper, we will use the solution from relative positioning mode as the baseline to evaluate the accuracy of the kinematic PPP method. Figure 4 shows the height variation of the GPS buoy from the relative positioning mode. The dark black line is the moving average of 5 minute position Fig. 1 Coordinate components convergence processi n g Figure 2(a) Kinematic PPP results with interpolated satellite clock errors Fig. 2(b) Kinematic PPP results with the IGS satelite clock errors Figure 3(a) The location of the reference station Fig. 3(b) The location of the GPS buoy results, which may represent the tide variation over the two days, while the light line represents the sea waves. In general, the mean sea surface observed by GPS is quite smooth, except two abrupt changes happened (see Figure 4) and that are due to the periods few satellites were observed with large DOP value. Then we estimate the position of the buoy using the kinematic PPP method proposed in this paper. The IGS rapid products (satellite orbit and clock errors) with the update rate of 15 minutes for orbit and 5 minutes for clock errors are used in data processing, as the IGS final products will only be available after a week of the observation. Figure 5 shows the height of the buoy from the kinematic PPP method by using 1 second GPS data from buoy only. The satellite clock errors are interpolated to every second by the 5 minute interval clock errors. The overall tide trend can be seen in Figure 5. However the results are much noisier compared with the relative positioning mode (Figure 4). Figure 6 compares the height difference between the relative mode and the PPP mode with 30 second interval. The errors of the PPP mode are quite large to over 0.5 m, with the RMS difference of 20 cm. Similarly, we process the GPS buoy data again with 5 minute update interval with the epoch exactly the same as the IGS clock error update. The height difference between the relative mode and the PPP mode is shown in Figure 7. The positioning differences are less than 20 cm, with an RMS difference 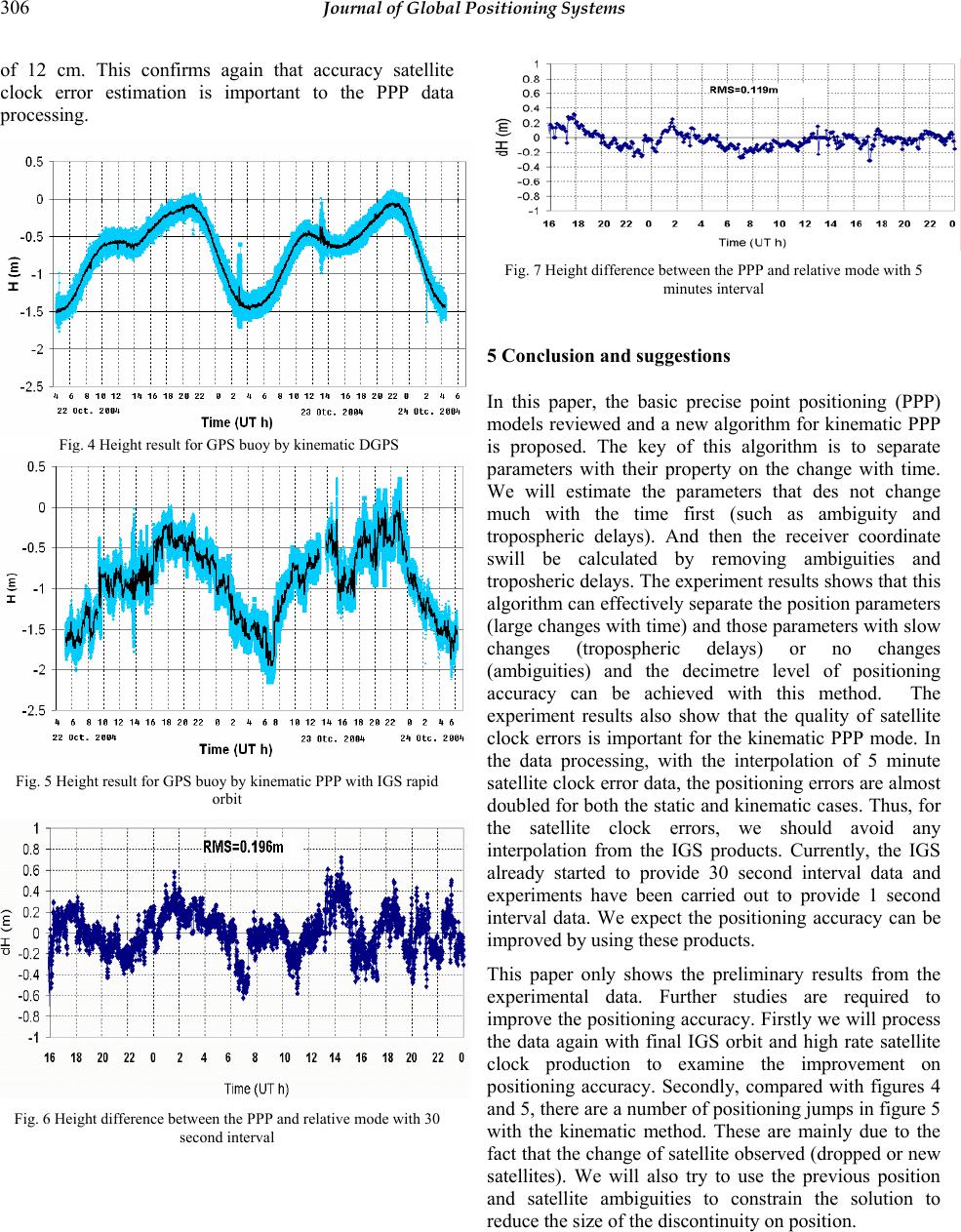 306 Journal of Global Positioning Systems of 12 cm. This confirms again that accuracy satellite clock error estimation is important to the PPP data processing. Fig. 4 Height result for GPS buoy by kinematic DGPS Fig. 5 Height result for GPS buoy by kinematic PPP with IGS rapid orbit Fig. 6 Height difference between the PPP and relative mode with 30 second interval Fig. 7 Height difference between th e PPP and relative mode with 5 minutes interval 5 Conclusion a nd suggestio ns In this paper, the basic precise point positioning (PPP) models reviewed and a new algorithm for kinematic PPP is proposed. The key of this algorithm is to separate parameters with their property on the change with time. We will estimate the parameters that des not change much with the time first (such as ambiguity and tropospheric delays). And then the receiver coordinate swill be calculated by removing ambiguities and troposheric delays. The experiment results shows that this algorithm can effectively separate the position parameters (large changes with time) and those parameters with slow changes (tropospheric delays) or no changes (ambiguities) and the decimetre level of positioning accuracy can be achieved with this method. The experiment results also show that the quality of satellite clock errors is important for the kinematic PPP mode. In the data processing, with the interpolation of 5 minute satellite clock error data, the positioning errors are almost doubled for both the static and kinematic cases. Thus, for the satellite clock errors, we should avoid any interpolation from the IGS products. Currently, the IGS already started to provide 30 second interval data and experiments have been carried out to provide 1 second interval data. We expect the positioning accuracy can be improved by using these products. This paper only shows the preliminary results from the experimental data. Further studies are required to improve the positioning accuracy. Firstly we will process the data again with final IGS orbit and high rate satellite clock production to examine the improvement on positioning accuracy. Secondly, compared with figures 4 and 5, there are a number of positioning jumps in figure 5 with the kinematic method. These are mainly due to the fact that the change of satellite observed (dropped or new satellites). We will also try to use the previous position and satellite ambiguities to constrain the solution to reduce the size of the discontinuity on position. 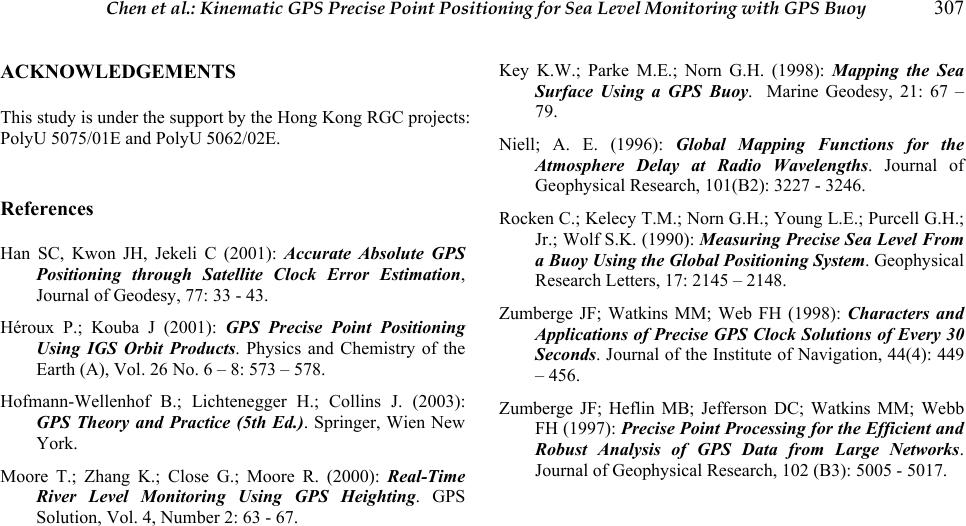 Chen et al.: Kinematic GPS Precise Point Positioning for Sea Level Monitoring with GPS Buoy 307 ACKNOWLEDGEMENTS This study is under the support by the Hong Kong RGC projects: PolyU 5075/01E and PolyU 5062/02E. References Han SC, Kwon JH, Jekeli C (2001): Accurate Absolute GPS Positioning through Satellite Clock Error Estimation, Journal of Geodesy, 77: 33 - 43. Héroux P.; Kouba J (2001): GPS Precise Point Positioning Using IGS Orbit Products. Physics and Chemistry of the Earth (A), Vol. 26 No. 6 – 8: 573 – 578. Hofmann-Wellenhof B.; Lichtenegger H.; Collins J. (2003): GPS Theory and Practice (5th Ed.). Springer, Wien New York. Moore T.; Zhang K.; Close G.; Moore R. (2000): Real-Time River Level Monitoring Using GPS Heighting. GPS Solution, Vol. 4, Number 2: 63 - 67. Key K.W.; Parke M.E.; Norn G.H. (1998): Mapping the Sea Surface Using a GPS Buoy. Marine Geodesy, 21: 67 – 79. Niell; A. E. (1996): Global Mapping Functions for the Atmosphere Delay at Radio Wavelengths. Journal of Geophysical Research, 101(B2): 3227 - 3246. Rocken C.; Kelecy T.M.; Norn G.H.; Young L.E.; Purcell G.H.; Jr.; Wolf S.K. (1990): Measuring Precise Sea Level From a Buoy Using the Global Positioning System. Geophysical Research Letters, 17: 2145 – 2148. Zumberge JF; Watkins MM; Web FH (1998): Characters and Applications of Precise GPS Clock Solutions of Every 30 Seconds. Journal of the Institute of Navigation, 44(4): 449 – 456. Zumberge JF; Heflin MB; Jefferson DC; Watkins MM; Webb FH (1997): Precise Point Processing for the Efficient and Robust Analysis of GPS Data from Large Networks. Journal of Geophysical Research, 102 (B3): 5005 - 5017. |