Paper Menu >>
Journal Menu >>
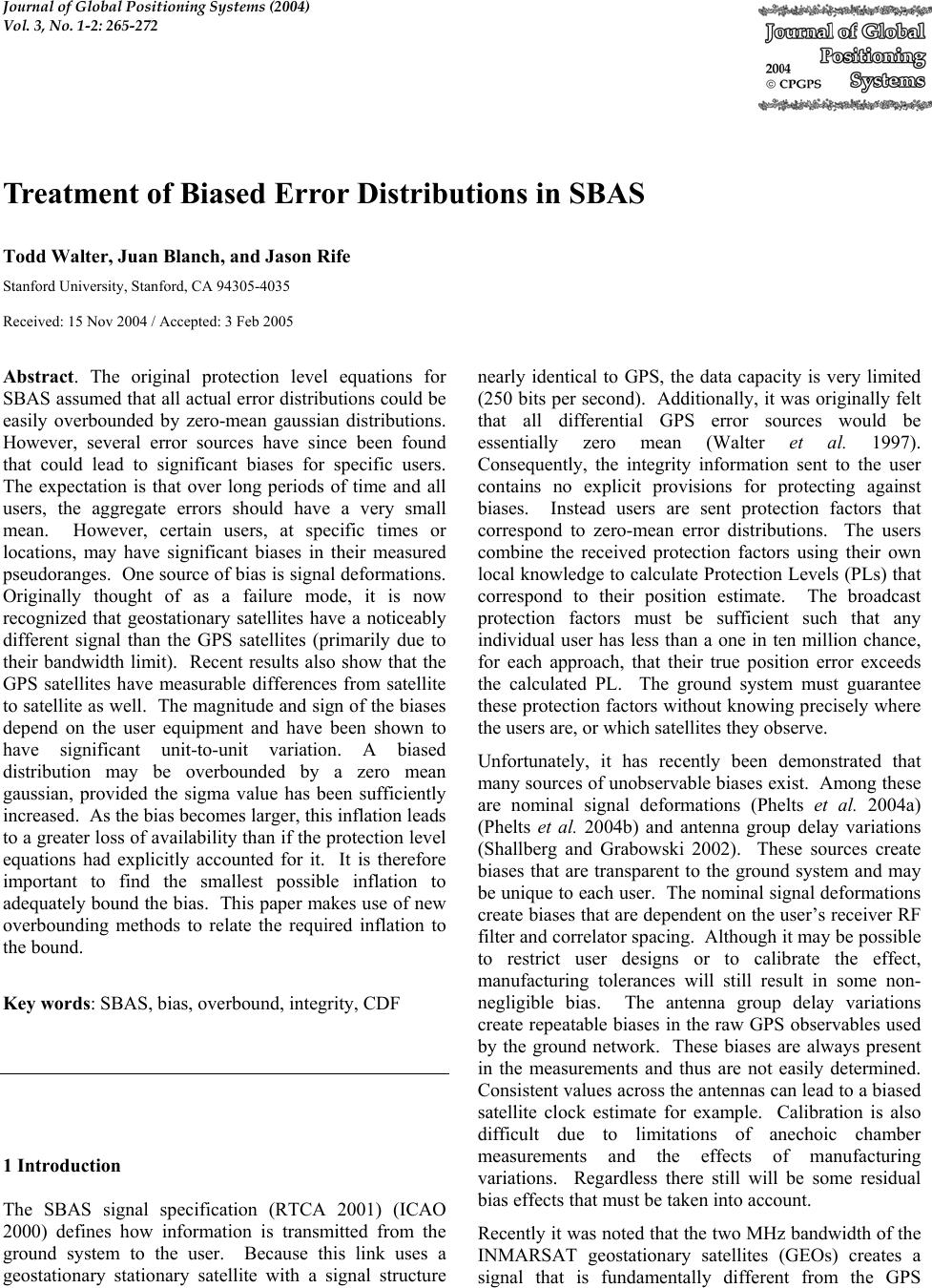 Journal of Global Positioning Systems (2004) Vol. 3, No. 1-2: 265-272 Treatment of Biased Error Distributions in SBAS Todd Walter, Juan Blanch, and Jason Rife Stanford University, Stanford, CA 94305-4035 Received: 15 Nov 2004 / Accepted: 3 Feb 2005 Abstract. The original protection level equations for SBAS assumed that all actual error distributions could be easily overbounded by zero-mean gaussian distributions. However, several error sources have since been found that could lead to significant biases for specific users. The expectation is that over long periods of time and all users, the aggregate errors should have a very small mean. However, certain users, at specific times or locations, may have significant biases in their measured pseudoranges. One source of bias is signal deformations. Originally thought of as a failure mode, it is now recognized that geostationary satellites have a noticeably different signal than the GPS satellites (primarily due to their bandwidth limit). Recent results also show that the GPS satellites have measurable differences from satellite to satellite as well. The magnitude and sign of the biases depend on the user equipment and have been shown to have significant unit-to-unit variation. A biased distribution may be overbounded by a zero mean gaussian, provided the sigma value has been sufficiently increased. As the bias becomes larger, this inflation leads to a greater loss of availability than if the protection level equations had explicitly accounted for it. It is therefore important to find the smallest possible inflation to adequately bound the bias. This paper makes use of new overbounding methods to relate the required inflation to the bound. Key words: SBAS, bias, overbound, integrity, CDF 1 Introduction The SBAS signal specification (RTCA 2001) (ICAO 2000) defines how information is transmitted from the ground system to the user. Because this link uses a geostationary stationary satellite with a signal structure nearly identical to GPS, the data capacity is very limited (250 bits per second). Additionally, it was originally felt that all differential GPS error sources would be essentially zero mean (Walter et al. 1997). Consequently, the integrity information sent to the user contains no explicit provisions for protecting against biases. Instead users are sent protection factors that correspond to zero-mean error distributions. The users combine the received protection factors using their own local knowledge to calculate Protection Levels (PLs) that correspond to their position estimate. The broadcast protection factors must be sufficient such that any individual user has less than a one in ten million chance, for each approach, that their true position error exceeds the calculated PL. The ground system must guarantee these protection factors without knowing precisely where the users are, or which satellites they observe. Unfortunately, it has recently been demonstrated that many sources of unobservable biases exist. Among these are nominal signal deformations (Phelts et al. 2004a) (Phelts et al. 2004b) and antenna group delay variations (Shallberg and Grabowski 2002). These sources create biases that are transparent to the ground system and may be unique to each user. The nominal signal deformations create biases that are dependent on the user’s receiver RF filter and correlator spacing. Although it may be possible to restrict user designs or to calibrate the effect, manufacturing tolerances will still result in some non- negligible bias. The antenna group delay variations create repeatable biases in the raw GPS observables used by the ground network. These biases are always present in the measurements and thus are not easily determined. Consistent values across the antennas can lead to a biased satellite clock estimate for example. Calibration is also difficult due to limitations of anechoic chamber measurements and the effects of manufacturing variations. Regardless there still will be some residual bias effects that must be taken into account. Recently it was noted that the two MHz bandwidth of the INMARSAT geostationary satellites (GEOs) creates a signal that is fundamentally different from the GPS 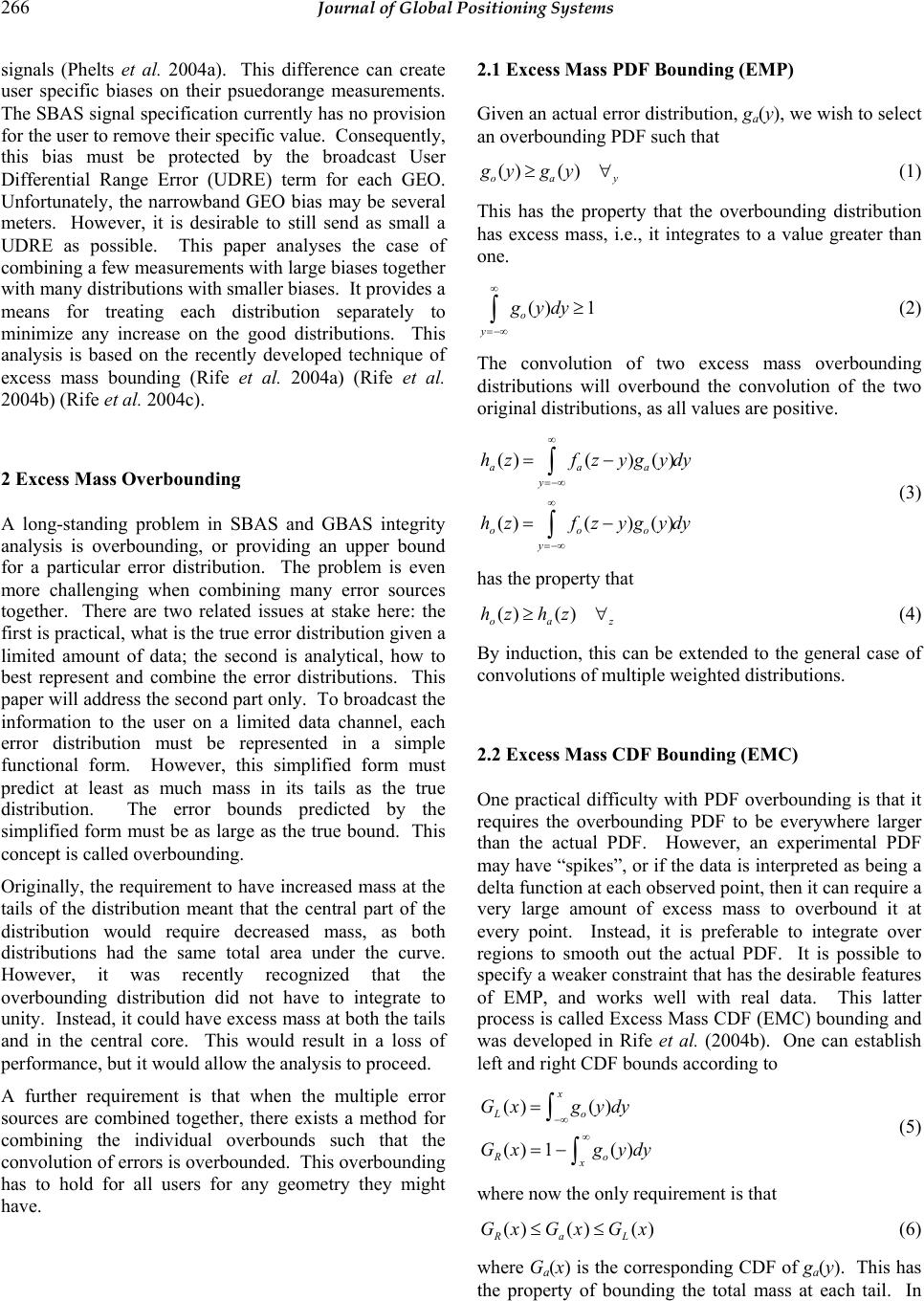 266 Journal of Global Positioning Systems signals (Phelts et al. 2004a). This difference can create user specific biases on their psuedorange measurements. The SBAS signal specification currently has no provision for the user to remove their specific value. Consequently, this bias must be protected by the broadcast User Differential Range Error (UDRE) term for each GEO. Unfortunately, the narrowband GEO bias may be several meters. However, it is desirable to still send as small a UDRE as possible. This paper analyses the case of combining a few measurements with large biases together with many distributions with smaller biases. It provides a means for treating each distribution separately to minimize any increase on the good distributions. This analysis is based on the recently developed technique of excess mass bounding (Rife et al. 2004a) (Rife et al. 2004b) (Rife et al. 2004c). 2 Excess Mass Overbounding A long-standing problem in SBAS and GBAS integrity analysis is overbounding, or providing an upper bound for a particular error distribution. The problem is even more challenging when combining many error sources together. There are two related issues at stake here: the first is practical, what is the true error distribution given a limited amount of data; the second is analytical, how to best represent and combine the error distributions. This paper will address the second part only. To broadcast the information to the user on a limited data channel, each error distribution must be represented in a simple functional form. However, this simplified form must predict at least as much mass in its tails as the true distribution. The error bounds predicted by the simplified form must be as large as the true bound. This concept is called overbounding. Originally, the requirement to have increased mass at the tails of the distribution meant that the central part of the distribution would require decreased mass, as both distributions had the same total area under the curve. However, it was recently recognized that the overbounding distribution did not have to integrate to unity. Instead, it could have excess mass at both the tails and in the central core. This would result in a loss of performance, but it would allow the analysis to proceed. A further requirement is that when the multiple error sources are combined together, there exists a method for combining the individual overbounds such that the convolution of errors is overbounded. This overbounding has to hold for all users for any geometry they might have. 2.1 Excess Mass PDF Bounding (EMP) Given an actual error distribution, ga(y), we wish to select an overbounding PDF such that go(y)≥ga(y) ∀ y (1) This has the property that the overbounding distribution has excess mass, i.e., it integrates to a value greater than one. go(y)dy≥1 y=−∞ ∞ ∫ (2) The convolution of two excess mass overbounding distributions will overbound the convolution of the two original distributions, as all values are positive. ha(z)=fa(z−y)ga(y) y=−∞ ∞ ∫dy ho(z)=fo(z−y)go(y) y=−∞ ∞ ∫dy (3) has the property that ho(z)≥ha(z) ∀ z (4) By induction, this can be extended to the general case of convolutions of multiple weighted distributions. 2.2 Excess Mass CDF Bounding (EMC) One practical difficulty with PDF overbounding is that it requires the overbounding PDF to be everywhere larger than the actual PDF. However, an experimental PDF may have “spikes”, or if the data is interpreted as being a delta function at each observed point, then it can require a very large amount of excess mass to overbound it at every point. Instead, it is preferable to integrate over regions to smooth out the actual PDF. It is possible to specify a weaker constraint that has the desirable features of EMP, and works well with real data. This latter process is called Excess Mass CDF (EMC) bounding and was developed in Rife et al. (2004b). One can establish left and right CDF bounds according to GL(x)=go(y)dy −∞ x ∫ GR(x)=1−go(y)dy x ∞ ∫ (5) where now the only requirement is that GR(x) ≤ Ga(x) ≤ GL(x) (6) where Ga(x) is the corresponding CDF of ga(y). This has the property of bounding the total mass at each tail. In 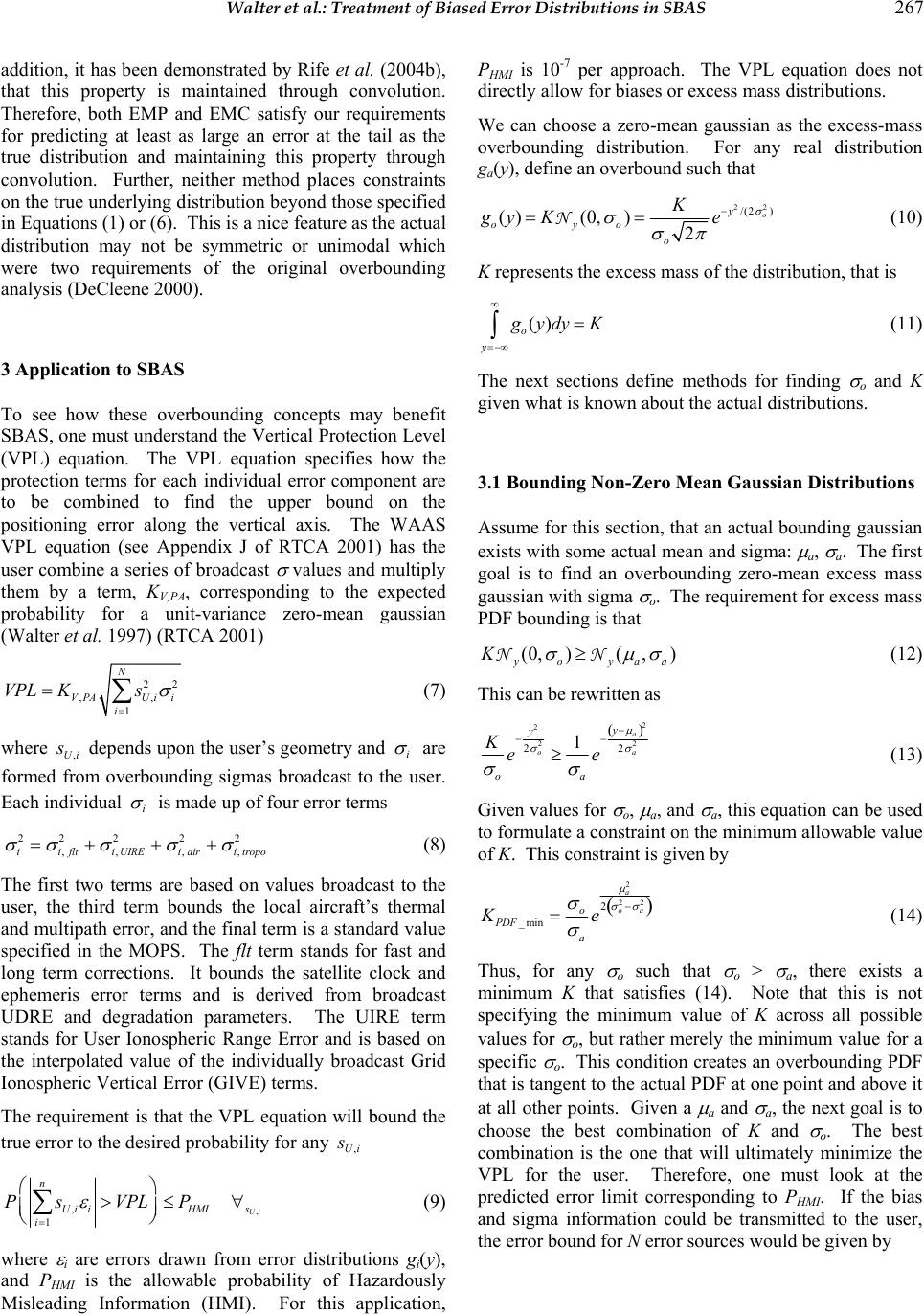 Walter et al.: Treatment of Biased Error Distributions in SBAS 267 addition, it has been demonstrated by Rife et al. (2004b), that this property is maintained through convolution. Therefore, both EMP and EMC satisfy our requirements for predicting at least as large an error at the tail as the true distribution and maintaining this property through convolution. Further, neither method places constraints on the true underlying distribution beyond those specified in Equations (1) or (6). This is a nice feature as the actual distribution may not be symmetric or unimodal which were two requirements of the original overbounding analysis (DeCleene 2000). 3 Application to SBAS To see how these overbounding concepts may benefit SBAS, one must understand the Vertical Protection Level (VPL) equation. The VPL equation specifies how the protection terms for each individual error component are to be combined to find the upper bound on the positioning error along the vertical axis. The WAAS VPL equation (see Appendix J of RTCA 2001) has the user combine a series of broadcast σ values and multiply them by a term, KV,PA, corresponding to the expected probability for a unit-variance zero-mean gaussian (Walter et al. 1997) (RTCA 2001) VPL =KV,PA sU,i 2 σ i 2 i=1 N ∑ (7) where sU,i depends upon the user’s geometry and σ i are formed from overbounding sigmas broadcast to the user. Each individual σ i is made up of four error terms σ i 2= σ i,flt 2+ σ i,UIRE 2+ σ i,air 2+ σ i,tropo 2 (8) The first two terms are based on values broadcast to the user, the third term bounds the local aircraft’s thermal and multipath error, and the final term is a standard value specified in the MOPS. The flt term stands for fast and long term corrections. It bounds the satellite clock and ephemeris error terms and is derived from broadcast UDRE and degradation parameters. The UIRE term stands for User Ionospheric Range Error and is based on the interpolated value of the individually broadcast Grid Ionospheric Vertical Error (GIVE) terms. The requirement is that the VPL equation will bound the true error to the desired probability for any sU,i Ps U,i ε i i=1 n ∑>VPL ≤P HMI ∀sU,i (9) where ε i are errors drawn from error distributions gi(y), and PHMI is the allowable probability of Hazardously Misleading Information (HMI). For this application, PHMI is 10-7 per approach. The VPL equation does not directly allow for biases or excess mass distributions. We can choose a zero-mean gaussian as the excess-mass overbounding distribution. For any real distribution ga(y), define an overbound such that go(y)=KNy(0, σ o)=K σ o2 π e−y2/(2 σ o 2) (10) K represents the excess mass of the distribution, that is go(y)dy=K y=−∞ ∞ ∫ (11) The next sections define methods for finding σ o and K given what is known about the actual distributions. 3.1 Bounding Non-Zero Mean Gaussian Distributions Assume for this section, that an actual bounding gaussian exists with some actual mean and sigma: µ a, σ a. The first goal is to find an overbounding zero-mean excess mass gaussian with sigma σ o. The requirement for excess mass PDF bounding is that KNy(0, σ o)≥Ny( µ a, σ a) (12) This can be rewritten as K σ o e −y2 2 σ o 2≥1 σ a e −y− µ a () 2 2 σ a 2 (13) Given values for σ o, µ a, and σ a, this equation can be used to formulate a constraint on the minimum allowable value of K. This constraint is given by KPDF _min = σ o σ a e µ a 2 2 σ o 2− σ a 2 () (14) Thus, for any σ o such that σ o > σ a, there exists a minimum K that satisfies (14). Note that this is not specifying the minimum value of K across all possible values for σ o, but rather merely the minimum value for a specific σ o. This condition creates an overbounding PDF that is tangent to the actual PDF at one point and above it at all other points. Given a µ a and σ a, the next goal is to choose the best combination of K and σ o. The best combination is the one that will ultimately minimize the VPL for the user. Therefore, one must look at the predicted error limit corresponding to PHMI. If the bias and sigma information could be transmitted to the user, the error bound for N error sources would be given by 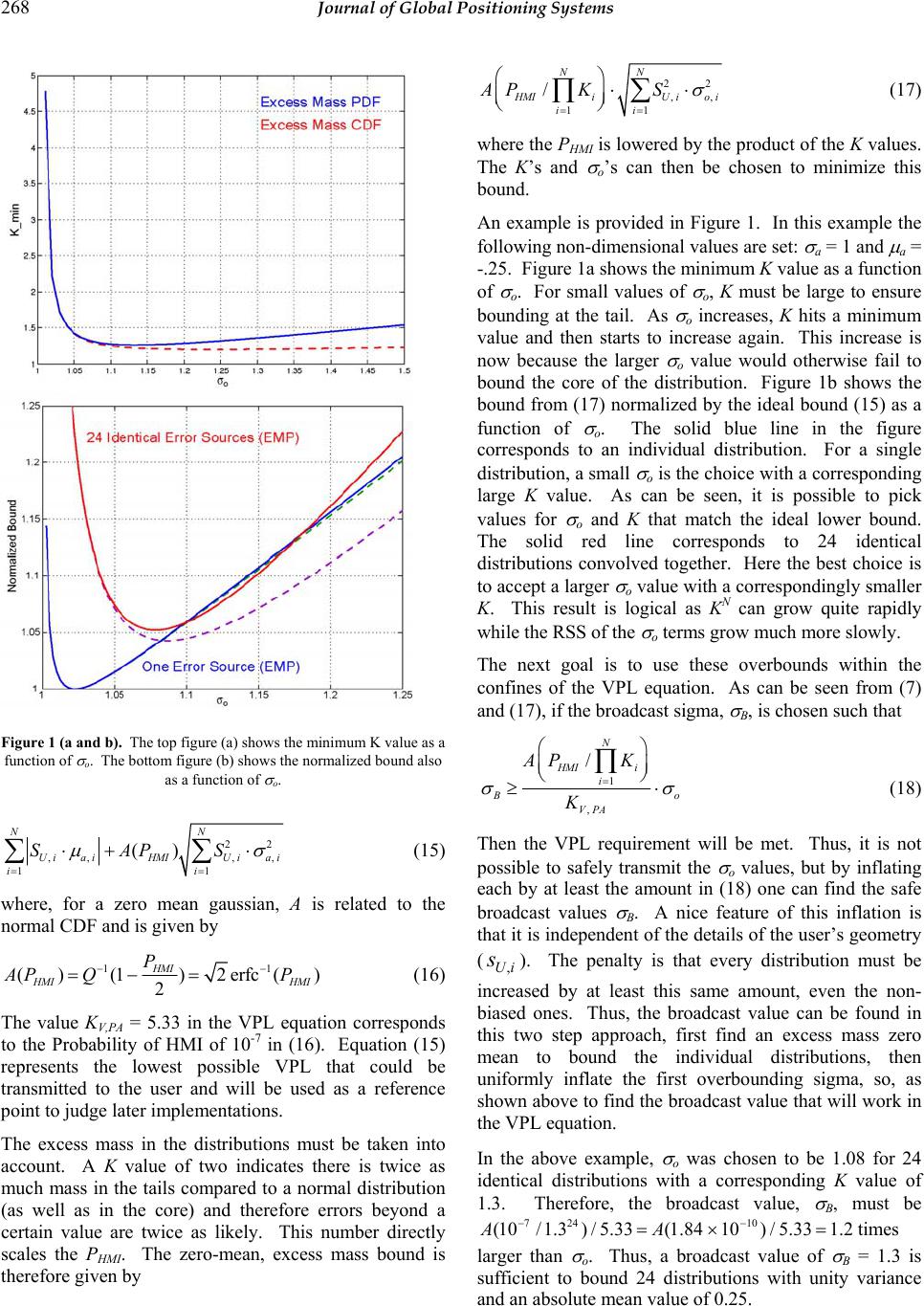 268 Journal of Global Positioning Systems SU,i⋅ µ a,i i=1 N ∑+A(P HMI )SU,i 2⋅ σ a,i 2 i=1 N ∑ (15) where, for a zero mean gaussian, A is related to the normal CDF and is given by A(P HMI )=Q−1(1 −P HMI 2)=2erfc−1(P HMI ) (16) The value KV,PA = 5.33 in the VPL equation corresponds to the Probability of HMI of 10-7 in (16). Equation (15) represents the lowest possible VPL that could be transmitted to the user and will be used as a reference point to judge later implementations. The excess mass in the distributions must be taken into account. A K value of two indicates there is twice as much mass in the tails compared to a normal distribution (as well as in the core) and therefore errors beyond a certain value are twice as likely. This number directly scales the PHMI. The zero-mean, excess mass bound is therefore given by AP HMI /Ki i=1 N ∏ ⋅SU,i 2⋅ σ o,i 2 i=1 N ∑ (17) where the PHMI is lowered by the product of the K values. The K’s and σ o’s can then be chosen to minimize this bound. An example is provided in Figure 1. In this example the following non-dimensional values are set: σ a = 1 and µ a = -.25. Figure 1a shows the minimum K value as a function of σ o. For small values of σ o, K must be large to ensure bounding at the tail. As σ o increases, K hits a minimum value and then starts to increase again. This increase is now because the larger σ o value would otherwise fail to bound the core of the distribution. Figure 1b shows the bound from (17) normalized by the ideal bound (15) as a function of σ o. The solid blue line in the figure corresponds to an individual distribution. For a single distribution, a small σ o is the choice with a corresponding large K value. As can be seen, it is possible to pick values for σ o and K that match the ideal lower bound. The solid red line corresponds to 24 identical distributions convolved together. Here the best choice is to accept a larger σ o value with a correspondingly smaller K. This result is logical as KN can grow quite rapidly while the RSS of the σ o terms grow much more slowly. The next goal is to use these overbounds within the confines of the VPL equation. As can be seen from (7) and (17), if the broadcast sigma, σ B, is chosen such that σ B≥ AP HMI /Ki i=1 N ∏ KV,PA ⋅ σ o (18) Then the VPL requirement will be met. Thus, it is not possible to safely transmit the σ o values, but by inflating each by at least the amount in (18) one can find the safe broadcast values σ B. A nice feature of this inflation is that it is independent of the details of the user’s geometry (sU,i). The penalty is that every distribution must be increased by at least this same amount, even the non- biased ones. Thus, the broadcast value can be found in this two step approach, first find an excess mass zero mean to bound the individual distributions, then uniformly inflate the first overbounding sigma, so, as shown above to find the broadcast value that will work in the VPL equation. In the above example, σ o was chosen to be 1.08 for 24 identical distributions with a corresponding K value of 1.3. Therefore, the broadcast value, σ B, must be A(10 −7/1.3 24 )/ 5.33=A(1.84 ×10 −10 ) /5.33 =1.2 times larger than σ o. Thus, a broadcast value of σ B = 1.3 is sufficient to bound 24 distributions with unity variance and an absolute mean value of 0.25. Figure 1 (a and b). The top figure (a) shows the minimum K value as a function of σ o. The bottom figure (b) shows the normalized bound also as a function of σ o.  Walter et al.: Treatment of Biased Error Distributions in SBAS 269 3.2 Applying Excess Mass CDF Bounding The prior analysis used EMP bounding to derive appropriate bounds. The requirement for excess mass CDF bounding are analogous to (13) and can be written in terms of the complimentary error function as K 2erfc −x 2 σ o ≥1 2erfc −x+ µ a 2 σ a ∀x (19) Although there is not a convenient closed form expression for K, it can be found numerically from the maximum value of the ratio KCDF _min =max erfc −x+ µ a 2 σ a erfc −x 2 σ o (20) Against biased gaussian distributions, KCDF_min will always be smaller than KPDF_min, although the difference will be small. All of the remaining equations above will work for EMC, except that a slightly smaller value for K may be used. Figures 1 and 2 show the comparison of the EMC vs. EMP. In Figure 1a, the EMC K value, shown with the dashed line, is slightly smaller. This improvement increases for larger values of σ o. The main difference is that the growth at larger σ o values is noticeably smaller. This is because the integration of the mass at the tails is nearly sufficient to cover the core distribution. In Figure 1b, the dashed lines represent the bound from (17) normalized by the ideal bound (15) as a function of σ o for EMC. For the single source case (dashed green line) there is little difference, both can achieve the ideal bound (The CDF of the overbounds and the actual distributions are tangent at 5.33). However, for the 24 identical distribution case, there is a small improvement. Now the optimal value of σ o is closer to 1.09 and the bound is only about 4% greater than ideal compared to 5% for EMP. Although EMC achieves lower bounds and is more practical with real data, the rest of this paper will continue to analyze EMP bounding. This is because of the closed form equation possible with EMP (14). It is worth remembering that this adds a small amount of conservatism in the analysis. If one applied EMC instead, one would have a small improvement. This results in a small margin against integrity. 3.3 Validating Broadcast Values In the WAAS safety analysis, the algorithms were derived and then tested against real data. The data is used to validate the performance of the algorithms. Because the MOPS only allows discrete broadcast values for the UDRE (14 numeric values) and GIVE (15 numeric values), it is convenient to partition the data by σ B. Thus, rather than trying to find a σ B value given a real distribution, the important question becomes: Does the chosen σ B value sufficiently bound the actual histogram? Because the feared biases are completely transparent to the system, they are not present in the validation data. Thus, the observed histograms are all nearly zero-mean. The feared biases are bounded by separate analysis and then included in this methodology. One can write that the actual gaussian bounding parameters as fractions of the desired broadcast value, that is: Figure 2 (a and b). The top two graphs (a) show the PDF (upper) and CDF (lower) for the two optimum cases in Figure 1b. The blue line corresponds to the optimal single error source bound while the green line is optimal for 24 identical distributions. The red line corresponds to the actual distribution. The bottom two graphs (b) are the same plots but on different scales to help see that the bounds (blue and green) always stay above the red on the top plots, and to the left and right on the bottom plots.  270 Journal of Global Positioning Systems σ a= α ⋅ σ B, µ a= γ ⋅ σ B (21) where α is between 0 and 1. The notation in this paper is slightly different from that in Rife et al. (2004c). This paper looks in terms of reduction from the broadcast value rather than inflation from the actual, thus α = 1/ Θ . From the histogram of data, it is possible to determine values of α and K that bound the data. However, γ will be unobserved as the system will have removed known biases. In Schempp and Rubin (2002) they determine values for α (labelled σ in their paper) for each of the observed UDRE and GIVE values. The observed biases are very small and can be treated as zero. The important question is given the observed α ’s how much margin is there for unobserved biases? The goal is to find the largest tolerable biases for given values of α . It is useful to define σ o also in terms of σ B. From (18) it can be seen that another parameter, η , can be defined such that σ o= η ⋅ σ B, η ≡KV,PA AP HMI /Ki i=1 N ∏ =KV,PA 2erfc−1P HMI /Ki i=1 N ∏ (22) This parameter represents an upper bound on α . This parameter is related to the ξ parameter in Rife et al. (2004c) as ξ = η / α . As the product of the K’s increases, so must the margin between σ o and σ B. Figure 3 shows a plot of η versus the product of K’s. Fortunately, it is a weak function and the product can grow quite large while decreasing η by only a small amount. To find a bound on γ , Equation (14), can be rewritten as KPDF _min = η α e γ 2 2 η 2− α 2 () (23) and inverted to yield γ max =2 η 2− α 2 () ln KPDF _min α η (24) However, KPDF_min depends on the other parameters. An expression for it can be found by making a few other assumptions. First, the product of the K’s can be expressed as a function of η , by inverting its definition in (22) Ki i=1 N ∏=P HMI erfc KV,PA 2 η (25) Next assume that the K product consists of two parts: a fixed allocation for nearly zero mean distributions (Kother), and a remainder that is evenly split among N satellites. This is the key piece of the approach as it allows for some satellites, such as the GEOs, to be treated differently than the others. Then KPDF_min is given by KPDF _min =P HMI erfc KV,PA 2 η Kother 1/N (26) This value can be substituted into (24) to yield the final expression for the maximum tolerable bias γ max =2 η 2− α 2 () ln PHMI erfc KV,PA 2 η Kother 1/N α η (27) Since α is known from the histogram and PHMI, KV,PA and Kother are fixed parameters, this function can be plotted versus η to determine the maximum value. An example is now provided to show how this process may be used. WAAS has collected extensive data in support of its certification in 2003 (Raytheon 2002). This data has been examined in many ways, it has been found that the largest α GPS for a particular σ B is .65 (Schempp 2004) for GPS UDRE and GIVE values. The goal is to determine the largest allowable bias on the GEO satellites. For GPS and ionospheric error distributions, allow K values up 1.15 to account for small biases and other non-gaussian behaviour. Assuming a 12-channel receiver and two narrowband GEOs, allows 22 GPS or ionospheric induced errors and 2 GEO errors. The parameter Kother is set to 1.1522 = 21.64. For the GEO the α GEO is either 0.7 for a minimum UDRE value of 7.5 m or 0.35 for a minimum value of 15 m. Figure 4 shows the results for setting Kother = 21.64 and α GEO = 0.7 (a) or α GEO = 0.35 (b), and assuming one or two GEO satellites. Figure 3. The value η is shown as a function of the product of the K’s. As can be seen it is a slow to decrease with very large K values.  Walter et al.: Treatment of Biased Error Distributions in SBAS 271 As can be seen from the figures, larger biases can be tolerated for smaller α GEO values and for fewer numbers of geostationary satellites. For the UDRE of 7.5 m ( σ B = 2.28 m) the maximum γ value occurs near η = 0.8 and is approximately 1.2 ( µ = 2.74 m) for one satellite, or 0.85 ( µ = 1.94 m) for two. For the UDRE floor of 15 m ( σ B = 4.56 m) the maximum γ value occurs near η = 0.55 and is approximately 3.3 ( µ = 15 m) for one satellite, or 2.3 ( µ = 10.49 m) for two. However, in the latter example, η cannot be allowed to go as low as 0.55 as α GPS must be above 0.65. This additional constraint from the GPS satellites implies that the lowest allowable η is about 0.7. Thus, the true maximum biases for the UDRE floor of 15 m are approximately 2.9 ( µ = 13.22 m) for one satellite or 2.0 ( µ = 9.12 m) for two. 4. Conclusions This paper took the concepts of excess mass bounding and applied them specifically to the case when a few biased error distributions are combined with many well- behaved ones. Specifically the case for WAAS with two narrowband GEOs was examined. It was shown that a methodology exists for determining the maximum tolerable bias under certain constraints. This methodology shows that based on the WAAS validation data, biases as large as 2.74 m can be tolerated for a GEO UDRE value of 7.5 m, or as large as 13.22 m for a GEO UDRE value of 15 m. These value decrease to 1.94 m and 9.12 when two GEOs may be visible. Excess mass bounding provides a methodology for formally accounting for biases that may be present. This methodology is fully compatible with the WAAS MOPS VPL equation that is based on zero-mean gaussian error distributions. CDF bounding in particular will work with a wide variety of actual distributions that are non-zero mean and non-gaussian. The methodology is also very flexible in allowing certain distributions to be treated differently from the others. Each distribution may be bounded with unique K and α values. This method allows for the accommodation of larger biases than allowed by other methods. Acknowledgements: The authors would like to acknowledge the funding from the FAA satellite navigation product team.. References DeCleene B (2000) Defining pseudorange integrity – overbounding, Proceedings of ION GPS 2000, Salt Lake City, Utah, September ICAO (2000) Annex 10 — Aeronautical Telecommunications.Volume I (Radio Navigation Aids), ICAO publication November 2000 Phelts RE, Walter T, Enge P, Akos DM, Shallberg K, and Morrissey T (2004a) Range biases on the WAAS geostationary satellites, Proceedings of the ION National Technical Meeting, San Diego, California, 26-28 January 2004 Phelts RE (2004b) Nominal signal deformation: limits on GPS range accuracy, Proceedings of the 2004 International Symposium on GPS/GNSS, Sydney, Australia, 6-8 December Raytheon (2002) Algorithm contribution to HMI for the wide area augmentation system, Raytheon Company Unpublished Work. Figure 4 (a and b). The top figure (a) shows the maximum γ value as a function of η for two cases with α GEO = 0.7. The bottom figure (b) shows the maximum γ value as a function of η for two cases with α GEO = 0.35.  272 Journal of Global Positioning Systems Rife J, Pullen S, Pervan B, and Enge P (2004a) Paired overbounding and application to GPS augmentation, Proceedings IEEE Position, Location and Navigation Symposium, Monterey, California, April Rife J, Pullen S, Pervan B, and Enge P (2004b) Core overbounding and its implications for LAAS integrity, Proceedings of ION GNSS 2004, Long Beach, California, September Rife J, Walter T, and Blanch J, (2004c) Overbounding SBAS and GBAS error distributions with excess-mass functions, Proceedings of the 2004 International Symposium on GPS/GNSS, Sydney, Australia, 6-8 December RTCA (2001) Minimum operational performance standards for global positioning system/wide area augmentation system airborne equipment, RTCA publication DO-229C. Schempp TR and Rubin AL (2002) An application of Gaussian overbounding for the WAAS fault free error analysis, Proceedings of ION GPS 2002, Portland, Oregon, 24-27 September Schempp TR (2004) A range domain bound on the GEO unobservable bias, Raytheon Company unpublished work, June 2004 Shallberg K and Grabowski J (2002) Considerations for characterizing antenna induced range errors, Proceedings of ION GPS 2002, Portland, Oregon, 24-27 September Walter T, Enge P, and Hansen A (1997) A proposed integrity equation for WAAS MOPS, Proceedings of ION GPS 97, Kansas City, Missouri, 16-19 September |