Paper Menu >>
Journal Menu >>
 Journal of Global Positioning Systems (2004) Vol. 3, No. 1-2: 232-241 A Performance Analysis of Future Global Navigation Satellite Systems Cedric Seynat1, Allison Kealy2, Kefei Zhang3 1GPSat Systems Australia, Suite 1/22 Aberdeen Road, McLeod, Victoria, email: cedric.seynat@gpsatsys.com.au, Tel: +61 (0)3 9455 0041 Fax: +61 (0)3 9455 0042 2Department of Geomatics, The University Of Melbourne, Victoria, Australia email: akealy@unimelb.edu.au, Tel: +61 (0)3 8344 6804 Fax: + 61 (0)3 9347 2916 3School of Mathematical and Geospatial Sciences, RMIT University, Victoria, Australia email: kefei.zhang@rmit.edu.au, Tel: +61 (0)3 9925 3272 Received: 15 Nov 2004 / Accepted: 3 Feb 2005 Abstract. For an increasing number of applications, the performance characteristics of current generation Global Navigation Satellite Systems (GNSS) cannot meet full availability, accuracy, reliability, integrity and vulnerability requirements. It is anticipated however that around 2010 the next generation of GNSS will offer around one hundred satellites for positioning and navigation. This includes constellations from the US modernised Global Positioning System, the Russian Glonass, the European Galileo, the Japanese Quasi- Zenith Satellite System and the Chinese Beidou. It is predicted that the performance characteristics of GNSS will be significantly improved. To maximise the potential utility offered by this integrated infrastructure, this paper presents an approach adopted in Australia to quantify the performance improvements that will be available in the future. It presents the design of a GNSS simulation toolkit developed in Australia and the performance expectations of future GNSS for a number of important applications within the Asia Pacific region. In quantifying the improvement in performance realised by combined systems, this paper proposes a practical approach to facilitate the development of innovative applications based on future GNSS. Key words: GPS, Galileo, GNSS, Simulation 1 Introduction Currently, there are only two satellite navigation systems in operation, the Global Positioning System (GPS), and the Russian equivalent Glonass. The GPS signal is free but its availability is not guaranteed and currently most users are prepared to accept this risk. However, as satellite navigation becomes a vital technology across a number of critical industrial sectors, the prospect of, for example, a nation’s transport infrastructure becoming dependent on this technology is a strategic risk that most industrial countries are not willing to accept. This argument initiated the Galileo programme in Europe. Galileo is a Global Navigation Satellite System (GNSS) and 30 satellites orbiting the Earth at an altitude of 23,616km (three spares) will transmit a navigation signal that can be received almost anywhere, and from which a receiver can determine its position and time. Unlike GPS, Galileo will also offer a guarantee of service to users who are willing to pay for it (e.g. commercial service – CS, and Public Regulated Service PRS) in addition to a free signal similar to that of GPS (Open Service - OS and Safety of Life service - SoL). Galileo will be available to the public in 2010 (European Commission, 2003). Despite many technical differences between these three GNSS systems, the commonality of the carrier frequencies they use creates the potential for the future development of an interoperable GNSS receiver, as illustrated in Table 1, which compares the services available and associated signals both now and at around 2015. Aside from these three core GNSS infrastructures, a number of additional space-based navigation systems are also under development through various national programmes. Japan is currently developing the Quasi- Zenith Satellite System (QZSS), with three satellites placed in a special orbit that maximises coverage over Japan. The QZSS will complement other existing GNSS systems over Japan, but at the same time, these satellites will also be available over Australia and the South East Asian region (Petrovski 2003). In China, the Beidou 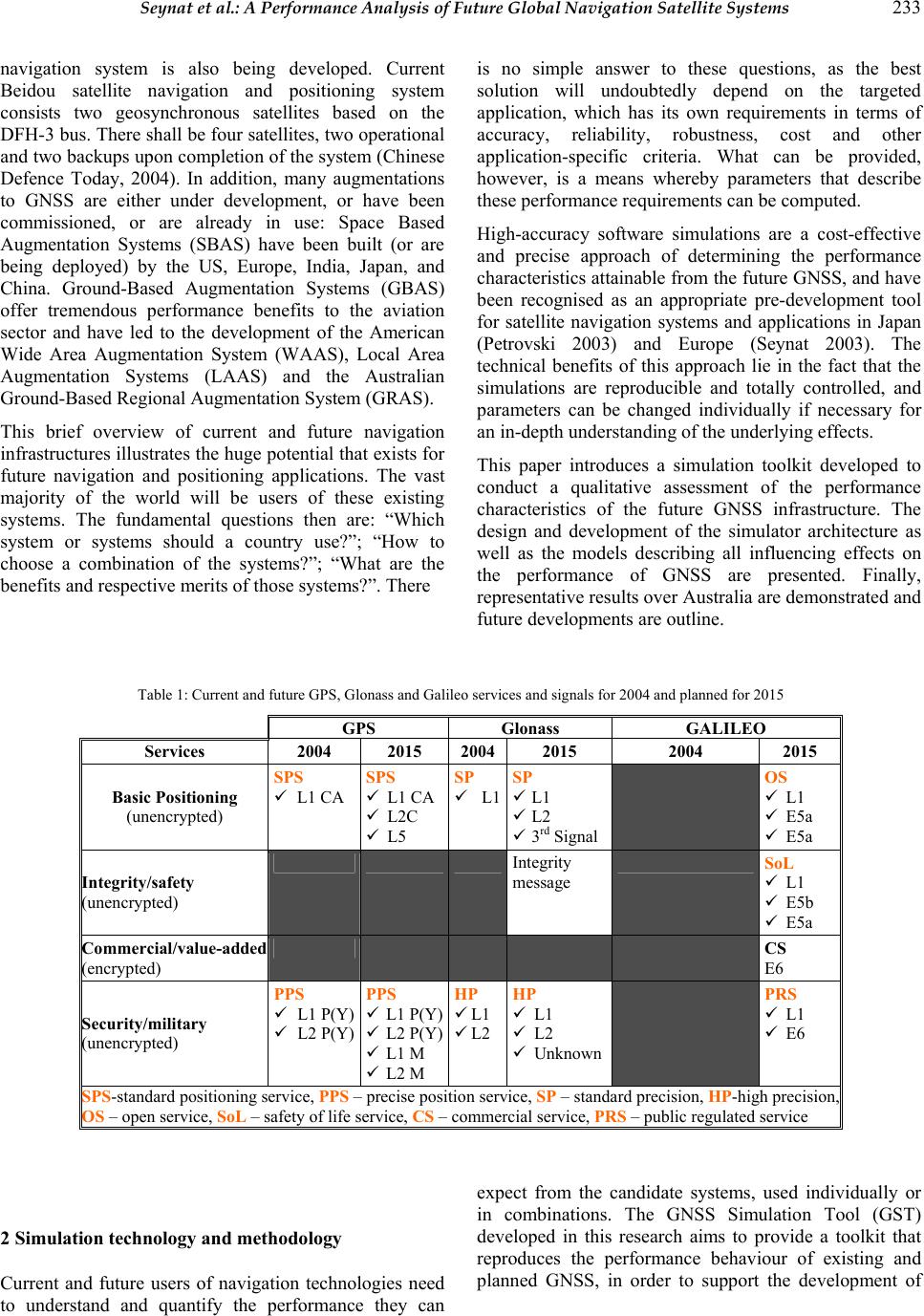 Seynat et al.: A Performance Analysis of Future Global Navigation Satellite Systems 233 navigation system is also being developed. Current Beidou satellite navigation and positioning system consists two geosynchronous satellites based on the DFH-3 bus. There shall be four satellites, two operational and two backups upon completion of the system (Chinese Defence Today, 2004). In addition, many augmentations to GNSS are either under development, or have been commissioned, or are already in use: Space Based Augmentation Systems (SBAS) have been built (or are being deployed) by the US, Europe, India, Japan, and China. Ground-Based Augmentation Systems (GBAS) offer tremendous performance benefits to the aviation sector and have led to the development of the American Wide Area Augmentation System (WAAS), Local Area Augmentation Systems (LAAS) and the Australian Ground-Based Regional Augmentation System (GRAS). This brief overview of current and future navigation infrastructures illustrates the huge potential that exists for future navigation and positioning applications. The vast majority of the world will be users of these existing systems. The fundamental questions then are: “Which system or systems should a country use?”; “How to choose a combination of the systems?”; “What are the benefits and respective merits of those systems?”. There is no simple answer to these questions, as the best solution will undoubtedly depend on the targeted application, which has its own requirements in terms of accuracy, reliability, robustness, cost and other application-specific criteria. What can be provided, however, is a means whereby parameters that describe these performance requirements can be computed. High-accuracy software simulations are a cost-effective and precise approach of determining the performance characteristics attainable from the future GNSS, and have been recognised as an appropriate pre-development tool for satellite navigation systems and applications in Japan (Petrovski 2003) and Europe (Seynat 2003). The technical benefits of this approach lie in the fact that the simulations are reproducible and totally controlled, and parameters can be changed individually if necessary for an in-depth understanding of the underlying effects. This paper introduces a simulation toolkit developed to conduct a qualitative assessment of the performance characteristics of the future GNSS infrastructure. The design and development of the simulator architecture as well as the models describing all influencing effects on the performance of GNSS are presented. Finally, representative results over Australia are demonstrated and future developments are outline. Table 1: Current and future GPS, Glonass and Galileo services and signals for 2004 and planned for 2015 GPS Glonass GALILEO Services 2004 2015 2004 2015 2004 2015 Basic Positioning (unencrypted) SPS 9 L1 CA SPS 9 L1 CA 9 L2C 9 L5 SP 9 L1 SP 9 L1 9 L2 9 3rd Signal OS 9 L1 9 E5a 9 E5a Integrity/safety (unencrypted) Integrity message SoL 9 L1 9 E5b 9 E5a Commercial/value-added (encrypted) CS E6 Security/military (unencrypted) PPS 9 L1 P(Y) 9 L2 P(Y) PPS 9 L1 P(Y) 9 L2 P(Y) 9 L1 M 9 L2 M HP 9 L1 9 L2 HP 9 L1 9 L2 9 Unknown PRS 9 L1 9 E6 SPS-standard positioning service, PPS – precise position service, SP – standard precision, HP-high precision, OS – open service, SoL – safety of life service, CS – commercial service, PRS – public regulated service 2 Simulation technology and methodology Current and future users of navigation technologies need to understand and quantify the performance they can expect from the candidate systems, used individually or in combinations. The GNSS Simulation Tool (GST) developed in this research aims to provide a toolkit that reproduces the performance behaviour of existing and planned GNSS, in order to support the development of 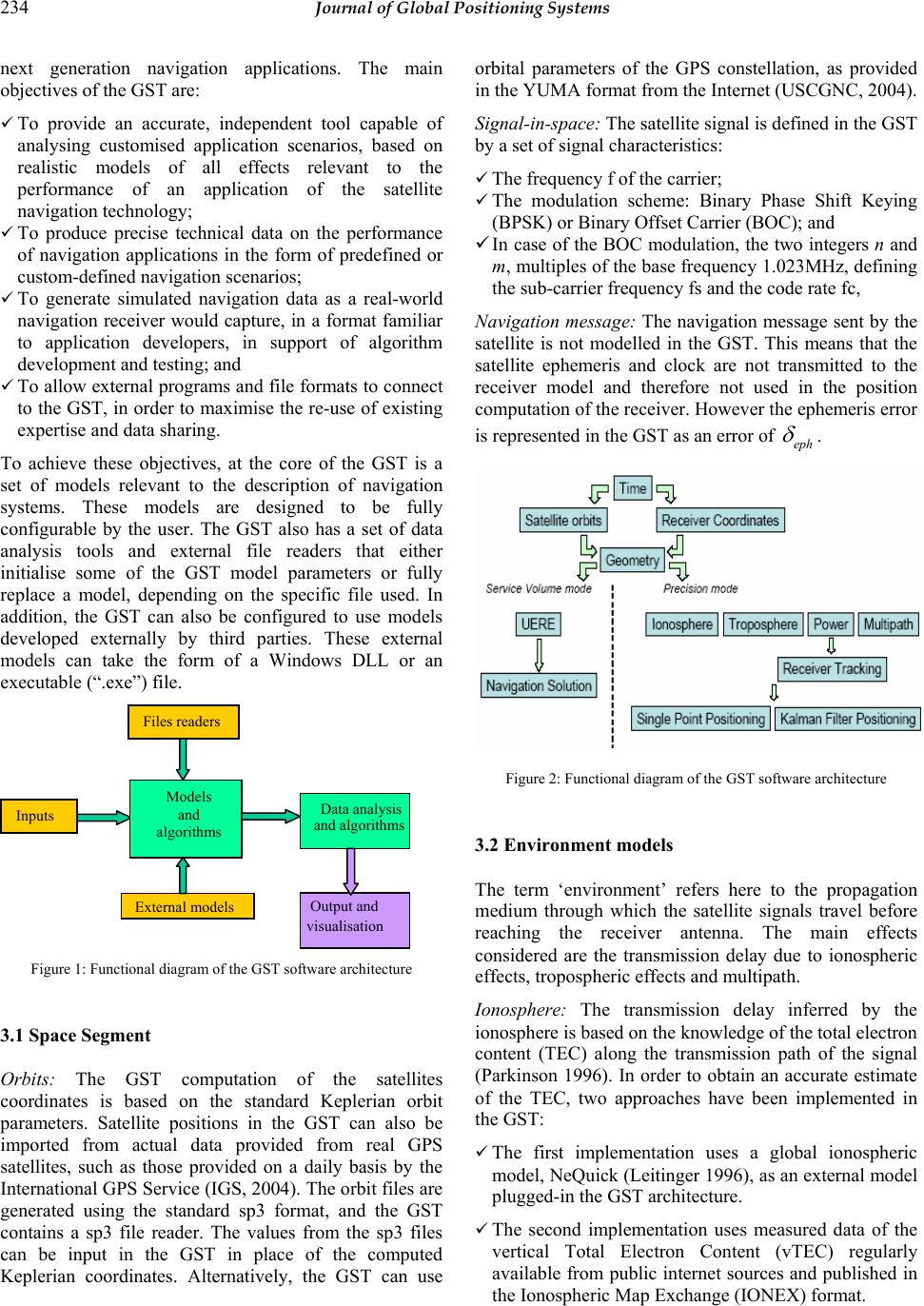 234 Journal of Global Positioning Systems next generation navigation applications. The main objectives of the GST are: 9 To provide an accurate, independent tool capable of analysing customised application scenarios, based on realistic models of all effects relevant to the performance of an application of the satellite navigation technology; 9 To produce precise technical data on the performance of navigation applications in the form of predefined or custom-defined navigation scenarios; 9 To generate simulated navigation data as a real-world navigation receiver would capture, in a format familiar to application developers, in support of algorithm development and testing; and 9 To allow external programs and file formats to connect to the GST, in order to maximise the re-use of existing expertise and data sharing. To achieve these objectives, at the core of the GST is a set of models relevant to the description of navigation systems. These models are designed to be fully configurable by the user. The GST also has a set of data analysis tools and external file readers that either initialise some of the GST model parameters or fully replace a model, depending on the specific file used. In addition, the GST can also be configured to use models developed externally by third parties. These external models can take the form of a Windows DLL or an executable (“.exe”) file. Figure 1: Functional diagram of the GST software architecture 3.1 Space Segment Orbits: The GST computation of the satellites coordinates is based on the standard Keplerian orbit parameters. Satellite positions in the GST can also be imported from actual data provided from real GPS satellites, such as those provided on a daily basis by the International GPS Service (IGS, 2004). The orbit files are generated using the standard sp3 format, and the GST contains a sp3 file reader. The values from the sp3 files can be input in the GST in place of the computed Keplerian coordinates. Alternatively, the GST can use orbital parameters of the GPS constellation, as provided in the YUMA format from the Internet (USCGNC, 2004). Signal-in-space: The satellite signal is defined in the GST by a set of signal characteristics: 9 The frequency f of the carrier; 9 The modulation scheme: Binary Phase Shift Keying (BPSK) or Binary Offset Carrier (BOC); and 9 In case of the BOC modulation, the two integers n and m, multiples of the base frequency 1.023MHz, defining the sub-carrier frequency fs and the code rate fc, Navigation message: The navigation message sent by the satellite is not modelled in the GST. This means that the satellite ephemeris and clock are not transmitted to the receiver model and therefore not used in the position computation of the receiver. However the ephemeris error is represented in the GST as an error of eph δ . Figure 2: Functional diagram of the GST software architecture 3.2 Environment models The term ‘environment’ refers here to the propagation medium through which the satellite signals travel before reaching the receiver antenna. The main effects considered are the transmission delay due to ionospheric effects, tropospheric effects and multipath. Ionosphere: The transmission delay inferred by the ionosphere is based on the knowledge of the total electron content (TEC) along the transmission path of the signal (Parkinson 1996). In order to obtain an accurate estimate of the TEC, two approaches have been implemented in the GST: 9 The first implementation uses a global ionospheric model, NeQuick (Leitinger 1996), as an external model plugged-in the GST architecture. 9 The second implementation uses measured data of the vertical Total Electron Content (vTEC) regularly available from public internet sources and published in the Ionospheric Map Exchange (IONEX) format. Models and algorithms Inputs Files readers Data analysis External models and algorithms Output and visualisation  Seynat et al.: A Performance Analysis of Future Global Navigation Satellite Systems 235 The two implementations described above for modelling of the ionospheric effect on the signal transmission are complementary rather than exclusive. While TEC maps provided by the IONEX files are more representative of the actual situation that one wants to simulate with the GST on a specific date, time, and location, the NeQuick model, is more generic and can be used to simulate a data and time set in the future. Troposphere: The signal transmission delay due to tropospheric effects is modelled using the refraction index of the troposphere (Di Giovanni 1990). The Hopfield model is used to estimate the refraction index (Hofmann 1998). The model is dependent on the estimates of local temperature, atmospheric pressure and water vapour partial pressure. In the GST these values can be set manually or alternatively, the GST can read meteorological data collected at ground reference stations and output in the Receiver Independent Exchange (RINEX) format (Gurtner 2002). Multipath: Multipath is highly dependent on the local environment surrounding the navigation receiver. Designed to be a generic tool, the GST models the multipath effect as its end effect on the measured range. Multipath causes a range measurement error, which can be isolated from other error sources in actual receiver measurements. The model used in the GST is an empirical model based on observations of time series of multipath range error (Parkinson 1996). The range error caused by multipath, mult δ , is modelled as follows: () ()()cos () multmultmult c tb antkt δη =+ (1) where bmult is the multipath bias error, amult is the amplitude of the multipath error, η is the satellite elevation angle at the receiver location, k is a factor required to adjust the elevation dependence, and nc(t) is correlated Gaussian noise. The model in Equation (1) is appropriate to represent the range error caused by the multipath for several reasons. First, the elevation dependence is modelled in such a way that satellite at a low elevation causes higher multipath errors, as it is observed from actual measurements. The factor “k” allows adjusting the peak of this elevation dependence. Secondly, the use of correlated Gaussian noise also represents effects seen in actual observations. Typical correlation times observed in multipath effects are of the order of a few minutes. To simplify the tuning of this model, the GST proposes several sets of default values corresponding to low, medium, and strong multipath environments. Expert users are also allowed to change parameters separately if they wish. 3.3 User Segment Receiver coordinates: Receiver coordinates are input in the GST as a latitude, longitude, and height in WGS-84. Masking angle: The GST allows the definition of a customised masking profile to represent the specific situation at a particular location. Receiver carrier-to-noise ratio: The total signal carrier- to-noise ratio is a measure of the signal quality and influences the tracking error. It is modelled as the sum of the signal-to-noise ratio where no jamming is present, plus the jammer-to noise ratio. Receiver tracking error: The modelling of the accuracy of the range measurement in the GST assumes a Non- Coherent Early-Late Processing. Two models are implemented, one for the GPS BPSK modulation scheme (Kaplan 1996) and one for the Galileo BOC scheme (Betz 2000). Receiver position: The receiver model computes an estimation of its position based on measured range between itself and each satellite in view. In the current implementation of the GST, the measured range is modelled as the true satellite-to-receiver range plus the sum of the errors described in the previous sections. Then the position is estimated using a weighted least square algorithm. User Equivalent Range Error: The models described in the previous sections account precisely for the different error sources affecting the navigation solution. An alternative, less accurate, modelling of these errors is commonly used when simulations need to be run for long simulated periods and over large geographical areas. In this alternative method, the errors are grouped in a User Equivalent Range Error (UERE). In the GST the UERE for each satellite is a function of its elevation. Published UERE values for GPS and Galileo were used (Shaw 2000, Benedicto 2000). 3.4 GST predefined figures of merits To describe the output of the GST a number of standard performance parameters are computed. 9 Availability of navigation solution: The receiver can make an estimate of its position and clock bias when at least 4 satellites are in view. The instantaneous availability of the navigation solution () i nav at is a flag set to 1 if at least four satellites are visible at a time t, and set to 0 otherwise: The availability of the navigation solution in a time window is the percentage of the time, in the time window, when () 1 i nav at = . 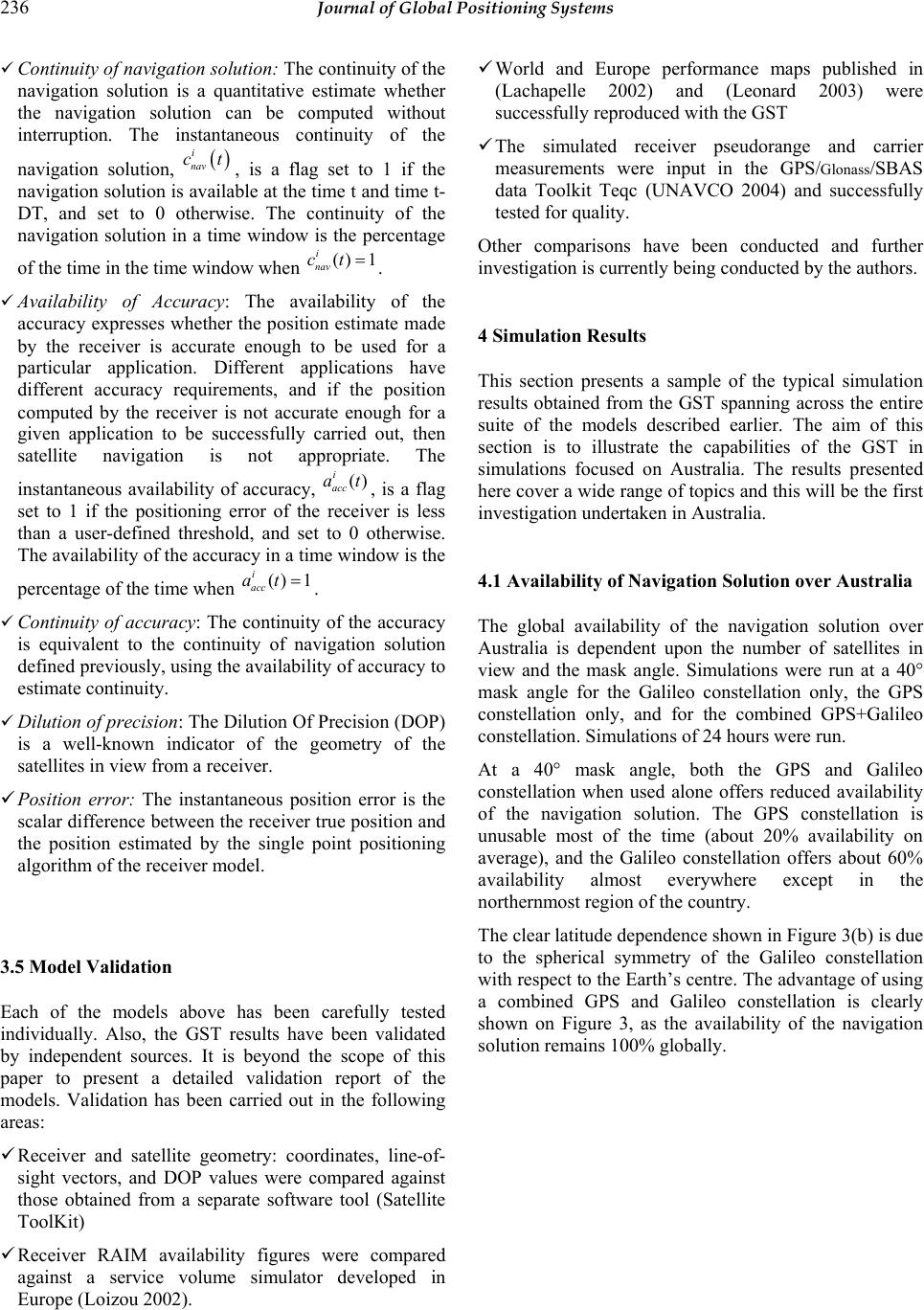 236 Journal of Global Positioning Systems 9 Continuity of navigation solution: The continuity of the navigation solution is a quantitative estimate whether the navigation solution can be computed without interruption. The instantaneous continuity of the navigation solution, () i nav ct , is a flag set to 1 if the navigation solution is available at the time t and time t- DT, and set to 0 otherwise. The continuity of the navigation solution in a time window is the percentage of the time in the time window when () 1 i nav ct=. 9 Availability of Accuracy: The availability of the accuracy expresses whether the position estimate made by the receiver is accurate enough to be used for a particular application. Different applications have different accuracy requirements, and if the position computed by the receiver is not accurate enough for a given application to be successfully carried out, then satellite navigation is not appropriate. The instantaneous availability of accuracy, () i acc at , is a flag set to 1 if the positioning error of the receiver is less than a user-defined threshold, and set to 0 otherwise. The availability of the accuracy in a time window is the percentage of the time when ()1 i acc at=. 9 Continuity of accuracy: The continuity of the accuracy is equivalent to the continuity of navigation solution defined previously, using the availability of accuracy to estimate continuity. 9 Dilution of precision: The Dilution Of Precision (DOP) is a well-known indicator of the geometry of the satellites in view from a receiver. 9 Position error: The instantaneous position error is the scalar difference between the receiver true position and the position estimated by the single point positioning algorithm of the receiver model. 3.5 Model Validation Each of the models above has been carefully tested individually. Also, the GST results have been validated by independent sources. It is beyond the scope of this paper to present a detailed validation report of the models. Validation has been carried out in the following areas: 9 Receiver and satellite geometry: coordinates, line-of- sight vectors, and DOP values were compared against those obtained from a separate software tool (Satellite ToolKit) 9 Receiver RAIM availability figures were compared against a service volume simulator developed in Europe (Loizou 2002). 9 World and Europe performance maps published in (Lachapelle 2002) and (Leonard 2003) were successfully reproduced with the GST 9 The simulated receiver pseudorange and carrier measurements were input in the GPS/Glonass/SBAS data Toolkit Teqc (UNAVCO 2004) and successfully tested for quality. Other comparisons have been conducted and further investigation is currently being conducted by the authors. 4 Simulation Results This section presents a sample of the typical simulation results obtained from the GST spanning across the entire suite of the models described earlier. The aim of this section is to illustrate the capabilities of the GST in simulations focused on Australia. The results presented here cover a wide range of topics and this will be the first investigation undertaken in Australia. 4.1 Availability of Navigation Solution over Australia The global availability of the navigation solution over Australia is dependent upon the number of satellites in view and the mask angle. Simulations were run at a 40° mask angle for the Galileo constellation only, the GPS constellation only, and for the combined GPS+Galileo constellation. Simulations of 24 hours were run. At a 40° mask angle, both the GPS and Galileo constellation when used alone offers reduced availability of the navigation solution. The GPS constellation is unusable most of the time (about 20% availability on average), and the Galileo constellation offers about 60% availability almost everywhere except in the northernmost region of the country. The clear latitude dependence shown in Figure 3(b) is due to the spherical symmetry of the Galileo constellation with respect to the Earth’s centre. The advantage of using a combined GPS and Galileo constellation is clearly shown on Figure 3, as the availability of the navigation solution remains 100% globally.  Seynat et al.: A Performance Analysis of Future Global Navigation Satellite Systems 237 (a) GPS (b) Galileo (c) Galileo+GPS Figure 3 - Availability of Navigation Solution over Australia for a 40° mask angle (a) Galileo (b) GPS (c) Galileo+GPS Figure 4 - 95% Percentile accuracy for a dual-frequency (a) L1/E5a Galileo receiver, (b) L1/L5 GPS receiver and (c) combined Galileo/GPS receiver at the same 2 frequencies  238 Journal of Global Positioning Systems 4.2 Positioning Accuracy The positioning accuracy presented in this section was obtained by using the GST in Service Volume mode. The UERE budget used for this purpose was a dual frequency L1/E5a Galileo receiver and dual frequency L1/L5 GPS receiver. Of course such receivers do not exist yet but their expected performance was presented in (Shaw, 2000; Benedicto, 2000) and are used here. A constant mask angle of 20° was used, for a simulation time of 24 hours. Figure 4 shows that the 95% accuracy to be expected from Galileo or GPS dual-frequency receivers is of the same order of magnitude (about 6m across the country). The combined performance of Galileo and GPS is expected to be of about 2-3m, which is a significant improvement compared to each individual system The effect of using a combined GPS/Galileo receiver is also to remove geographical disparity across the country. The time traces of positioning accuracy (not displayed here) are also more consistent, with less fluctuation. This effect of combined use is as important as the absolute gain in accuracy itself. Users using Galileo/GPS receivers can expect a consistent performance of their system, which may reduce the need for costly augmentations in areas and at times of the day where individual systems fail to deliver the required performance level. 4.3 Impact of QZSS on navigation performance in Australia The QZSS has the primary objective of augmenting GPS over Japan so that satellite availability in dense urban areas like Tokyo remains high. The orbit of the QZSS satellites is such that there will always be at least one, and often 2 satellites in view and at high elevation from receivers located in Japan. However, the QZSS satellites also pass above Australia, and for that reason they offer the potential of augmenting GPS in Australia as well. This potential is assessed here with the GST. The design of the QZSS constellation orbits is presented by Petrovski (2003), with several options being considered including an “8-shape” orbit used in subsequent GST simulation shown here. The QZSS satellites will pass above or near Australia. It is therefore possible to envisage that those satellites can be used in Australia, in the same way as they will be used in Japan, i.e. as an augmentation to GPS. The number of visible QZSS satellites and their elevation is presented here for four Australian state capitals, namely Melbourne, Sydney, Darwin and Perth. These locations have been chosen because they are widespread across the country and because the benefits of using QZSS in urban areas will be illustrated later, particularly in low visibility situations that can occur in Melbourne or Sydney. Figure 6 indicates that QZSS satellites in an “8-shape” orbit will be well visible from Australia. In Melbourne and Sydney, at least one satellite will be visible above 60° at all times. In Darwin, all 3 satellites will be visible at all times from locations with mask angles lower than 25. The figures from Perth are also excellent. Figure 5 shows that QZSS is particularly relevant to Australian GNSS users. In areas of reduced visibility, the availability of a single additional satellite in all times can make a difference between getting a position fix or not. At least one QZSS satellite will be almost always in view at any time, even in urban canyons. With this preliminary result based on geometry, it appears that QZSS usage in Australia should be investigated further, at both technical and political levels. To illustrate the navigation improvement resulted from the combined use of GPS and QZSS in Australia, the simulation results in an urban area is presented in Figure 6, for the location of Melbourne, and a mask profile representing an urban canyon. Figure 6 shows the availability and continuity of the accuracy in an urban environment at the location of Melbourne for the GPS only and combined GPS/QZSS cases. The simulation uses a single frequency receiver and the plot displayed here is relevant to mass market applications, such as personal mobility. The gain in availability and continuity of accuracy is clear from these plots, although for an accuracy threshold of 12m, 100% availability and continuity is not achieved at all times even with combined QZSS+GPS receivers. Additional systems, such as the addition of Galileo or pseudolites, may be required depending on the application considered. Investigation into pseudolite networks in urban environments is a potential field of study that can be made with the GST. Overall, the results presented in the previous three sections show the significant improvement in navigation performance to be expected from a receiver capable of tracking several independent systems. More than in positioning accuracy, the improvement is in the consistency of the performance and therefore in the reliability of the application from the end-user perspective. This is an important consideration from a marketing perspective, as users are more likely to adopt the new technology if its reliability is certified 4.4 Raw data generation for post-processing by third party software Based on its accurate models and its end-to-end capability, the GST can be used to generate simulated measurement as they would be received by a real receiver. The GST uses the widely accepted RINEX 2.1 format to output simulated data. The GST generates the RINEX observation and navigation files. Part of the  Seynat et al.: A Performance Analysis of Future Global Navigation Satellite Systems 239 validation exercise outlined in Section 3.5 was to produce RINEX files and input them in the TEQC software for quality check. More generally, the availability of simulated Galileo and GPS data opens the possibility for research organisations to start testing algorithms and applications early, in readiness for the future availability of the hardware. This approach saves development and testing effort and can be achieved using the GST. Such capabilities will be illustrated in further publications. (a) Melbourne (b)Sydney (c)Darwin Figure 5 “8-shape” QZSS satellite elevation (left) and number of visible satellites (right) at Melbourne, Sydney and Darwin in Australia  240 Journal of Global Positioning Systems Figure 6 Availability of Accuracy and Continuity of Accuracy from a receiver in an urban area at the location of Melbourne, obtained from an accuracy threshold of 12m 5 Conclusions This paper presents the GNSS Simulation Tool, a software tool of navigation systems that aims to provide a means for research organisations and industry to develop navigation applications using the current and emerging technologies. The reason to build such a tool today originates from the fact that navigation technology, and especially satellite navigation, is now at a major crossroad: new satellite systems are being built in Europe, Japan, India, China and the United States. Current systems are being maintained, augmented and rapidly improved, in Russia and the United States. Adding to the advent of these new technologies is the booming need in today’s society for positioning information. It is the dual growth of the technology and the market that makes the future of navigation multidisciplinary and challenging. The current GST itself cannot handle fully the complexity and variety of the challenges to come in the near future. However, it provides a low-cost, flexible tool to provide specific answers to a number of performance related questions. The potential areas of further development for the GST are numerous. One of the most promising applications is the generation of raw pseudorange and carrier phase measurements, formatted in RINEX 2.1, to be directly usable for algorithm development and application certification. The capability to generate RINEX files is already presented in the GST, but further models and validation can be added, such as the possibility to simulate satellite outages, or the random introduction of corrupt measurements, that a real receiver would experience. Also, the Galileo RINEX format, when it  Seynat et al.: A Performance Analysis of Future Global Navigation Satellite Systems 241 becomes available, can be easily incorporated into the GST. For application development, the introduction of pseudolites in the simulation would be a useful addition to the tool. From the modelling perspective, ionosphere scintillation, troposphere irregularities (e.g. rainfall), clock errors, and refined receiver algorithms are other interesting developments currently being considered. The simulation results presented here are just a subset of the entire suite of outputs that the GST can provide. They have shown the quantitative benefits of complementing GPS with another system such as Galileo. Future availability of complementary systems is particularly relevant to the South-East Asia regions and countries such as Australia are in a privileged position to develop innovative applications based on an interoperable use of future GNSS. 6 Acknowledgements GST validation uses the service volume simulation tool developed by VEGA Plc and kindly provided by John Loizou. John is thanked for providing the tool and his insightful comments on validation and simulation. Partial financial support from Victorian Partnership for Advanced Computing (VPAC) and Corporative Research Centre for Micro-technology endorsed to A/Prof Zhang is highly acknowledged. References Barnes J, Rizos C, Wang J, Small D, Voigt G, and Gambale N (2004) High precision indoor and outdoor positioning using LocataNet, Journal of Global Positioning Systems, 2(2):73-82 Bartone CG (1996) Advanced pseudolite for dual-use precision approach applications, Proceedings of 9th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Kansas City, Missouri, 17-20 Sept., 95-105 Benedicto J., Dinwiddy S., Gatti G., Lucas R., Lugert M., Galileo: Satellite System Design and Technology Developments, European Space Agency, November 2000, http://ravel.esrin.esa.it/docs/galileo_world_paper_Dec_200 0.pdf. Chinese Defence Today (2004) BD-1 Navigation Satellite, http://www.sinodefence.com/space/ spacecraft/bd1.asp. Di Giovanni G., Radicella S., An analytical model of the electron density profile in the ionosphere, Advances in Space Research, Volume 10, 1990. European Comission (2003), The Galilei Project, Galileo Design Consolidation, http://europa.eu.int/comm/dgs/ energy_transport/galileo/doc/galilei_brochure.pdf. Featherstone WE, Kirby JF, Zhang KF, Kearsley AHW, Gilliland JR (1997) The quest for a new Australian gravimetric geoid, in: Segawa J, Fujimoto H, Okubo S (eds), Gravity, Geoid and Marine Geodesy, Springer, Berlin, 581-588 Gurtner W., RINEX: The Receiver Independent Exchange Format Version 2.10, ftp//igscb.jpl.nasa.gov/igscb/ data/format/ (2002) Hofmann-Wellenhof B., Lichtenegger H., Collins J., GPS Theory and Practice, Springer-Verlag, 1998. IGS website: http://igscb.jpl.nasa.gov (last visited November 2004) Kaplan E., Understanding GPS Principles, Artech House, 1996. Lachapelle G., Cannon M., O’Keefe K., Alves P., How will Galileo Improve Positioning Performance? GPS World, September 2002, 38-48. Leitinger R., Radicella S.(1996), NeQuick Ionospheric Model, Software Documentation, http://www.itu.int/ ITUR/software/study-groups/rsg3/databanks/ionosph/ Rec531/NeQuick_ITUR_software.pdf. Leonard A., Krag H., Lachapelle G., O'Keefe K., Huth C., Seynat C., Impact of GPS and Galileo Orbital Plane Drifts on Interoperability Performance Parameters, GNSS 2003 Conference, Graz, Austria, 22-25 April 2003. Loizou J. Service Volume Tool for RAIM computation, Private Communication. Parkinson B., Spilker J. (Editors), Global Positioning System: Theory and Applications, Volume 1, Progress in Astronautics and Aeronautics Volume 163, 1996. Petrovski I. (2003), QZSS - Japan's New Integrated Communication and Positioning Service for Mobile Users, GPS world, June 2003 issue. Seynat C., Pidgeon A., and Loizou J. (2003), Combined use of Galileo and GPS: towards innovative navigation research, Proceedings of SatNav2003, the 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning & Location Services, Melbourne, Australia, 22-25 July 2003 Shaw M., Sandhoo K., Turner D., GPS Modernization, Proceedings of The Royal Institute of Navigation GNSS-2000, Edinburgh, Scotland, May 2000. UNAVCO Facility, Boulder, Colorado, Teqc homepage, http://www.unavco.org/facility/software/teqc/teqc.html (last visited November 2004) United States Coast Guard Navigation Center, GPS Almanac Information, http://www.navcen.uscg.gov/gps/almanacs. htm (last visited November 2004) |