Paper Menu >>
Journal Menu >>
 Journal of Software Engineering and Applications, 20 12, 5, 140-143 doi:10.4236 /js ea.2012.512b027 Published Online December 2012 (http://www.SciRP.org/journal/jsea) Copyright © 2012 SciR es. JSEA Analysis of Uncontrollable Variables to the Performance of Predefi ned Tasks Eunghyun Lee1, Jinwoo Lee1, Jungwan Hong1, Younghoon Ko1, Yongjin Kwon1, Sang C. Park1, Jonghoon Lee2, Miseon Yi2 1Department of Industrial Engineering, Ajou University, Suwon, South Korea; 2D Agency for Defense Development, South Korea. Email: yk73@ajou.ac.kr Received 2012 ABSTRACT The ai m of this res earch was to investigate the impacts of c hanging environ mental fa ctors on pilots by implementing the effective flight procedure that we found from the previous research. During the experiments, camcorders were used to monitor and analyze the tasks and physical exhaustion of the pilot. NASA-TLX was also used to collect the data of the workload. Through this experiment, we were able to approach the experiment from a different angle regarding the op- timal assigned work of the pilo t, unlike the previo us studies. Also, we were able to find out the impacts o f environ men- tal factors on the pilot’s workload. Keywords: Helicopter Mission; Task Performance Time; Tas k Workload; Armed Helicopter 1. Introduction This research has adopted a new working procedure that involves a different kind of helicopter: a side-by-side helicopter. Due to the fact that the optimal weather con- dition was included, we did not take other external envi- ronmental factors, such as the change in visual field or the c han ge in the mana geme nt o f the eq uipme nt, i nto co n- sideration. T herefore, the main purpose of this research is to find to what e xtent cap tain pilots/co-pilo ts are a ffected by the external environmental factors including Daytime experiment, Nighttime experiment, Bad weather experi- ment and Solo flight by using the procedure derived from our previ ous studies. 2. Experimental Configuration 2.1. Applying Our Previo u s Research The side-by-side helicopter enables the captain pilot/co - pilot to share the same working area and dualize the flight instr uments, thus a llo wing the m to share t heir ta sks. Hence, in order to invent a ne w combination of the task, we divided the working procedure into four different procedures for Experiment 1. Also, in Experiment 2, we developed a new scenario by dividing the working pro- cedure differently from Experiment 1 and analyzed the record ed data including the total amount of time spent to complete the task, lethality, the efficiency of the per for- mance of the pilots, and more. The optimal working pro- cedure developed through this method is shown in Table 1 and has been used for this research. 2.2. Experimental Method Due to the fact that this research is mainly focused on measuring the change in the wo r kl oa d of the pilot accord- ing to the change in external environmental factors, we constructed four different experimental environment based on the different time of the day and meteorological conditions that can be manipulated by the flight simulator. Daytime experiment, which was also used in the previous studie s, was the most basic expe ri mental en viro n ment wit h the least amount of restrictions. Nighttime experi- ment was executed with the use of Night Vision and had more constraints, such as speed limit, due to the difficulties of securing a clear view. Also, to apply the difficulties of securing a clear view because of the fog, we set the visual Table 1 . Table of flig ht procedu re. Pilots Task detail Captain Pilot Main flight/hovering & return Operate commun ications Co-Pilot Operate warning system Detect the threat Common Evasion flight/Operati on of radio 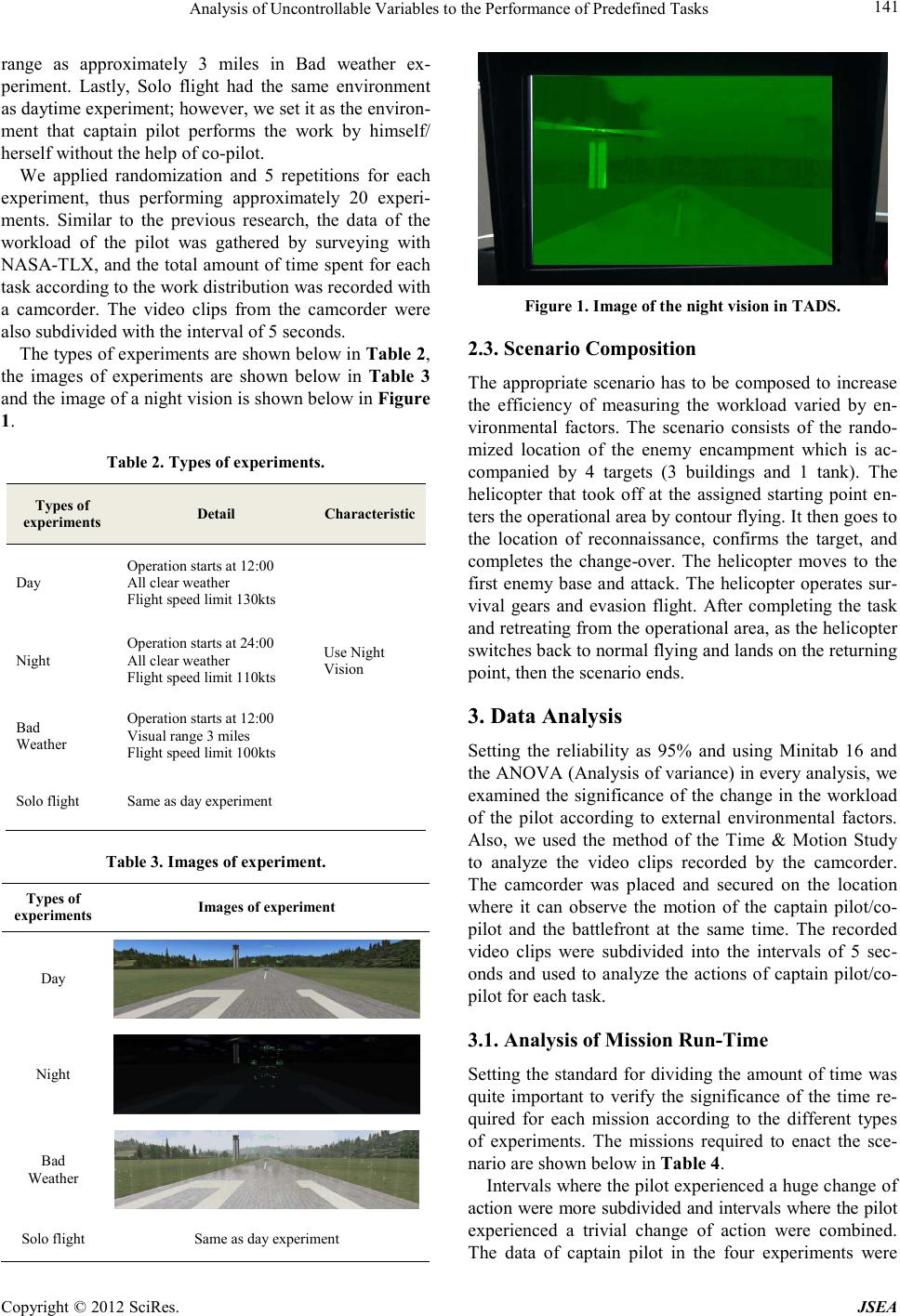 Analysis of Uncontrollable Variables to the Performance of Predef ined Tasks Copyright © 2012 SciR es. JSEA 141 range as approximately 3 miles in Bad weather ex- perimen t. Lastly, Solo flight had the same environment as daytime experiment; however, we set it as the environ- ment that captain pilot performs the work by himself/ herse lf witho ut the help of co-p ilo t. We applied randomization and 5 repetitions for each experiment, thus performing approximately 20 experi- ments. Similar to the previous research, the data of the workload of the pilot was gathered by surveying with NASA-TLX, and the total amount of time spent for each task accor ding to the work di stribution was recorded with a camcorder. The video clips from the camcorder were also subdivided with the interval of 5 seconds. The types of experiments are sho wn bel o w in Table 2, the images of experiments are shown below in Table 3 and the i ma ge of a night vi si on i s s ho wn b el o w i n Figure 1. Table 2. Ty pes of ex periments. Type s of experiments Detail Characteristic Day Opera tion starts at 12:00 All clear w eather Flight speed limit 130kts Night Operation starts at 24:00 All clear w eather Flight speed limit 110kts Use Night Vision Bad Weather Operation star ts at 12:00 Visual range 3 miles Flight speed limit 100kts Solo fligh t Sa me as d ay experiment Table 3. Images of experiment. Type s of experiments Images o f exp er imen t Day Night Bad Weather Solo fligh t Sa me as day experiment Figure 1. Image of t he night vision in TADS. 2.3. Scenario Composition The appropriate scenario has to be composed to increase the efficiency of measuring the workload varied by en- vironmental factors. The scenario consists of the rando- mized location of the enemy encampment which is ac- companied by 4 targets (3 buildings and 1 tank). The helicopter that took off at the assigned starting point en- ters the opera tional ar ea b y contour flying. It the n goes to the location of reconnaissance, confirms the target, and completes the change-over. The helicopter moves to the first enemy base a nd attack. The helicopter operates sur- vival gears and evasion flight. After completing the task and retreating from the operational area, as the helicopter switches back to normal fl yi n g a nd l and s o n the r eturnin g point, then the scenario ends. 3. Data Analysis Setting the reliability as 95% and using Minitab 16 and the ANOVA (Anal ysis o f vari ance) in ever y analysi s, we examined the significance of the change in the workload of the pilot according to external environmental factors. Also, we used the method of the Time & Motion Study to analyze the video clips recorded by the camcorder. The camcorder was placed and secured on the location where it can observe the motion of the captain pilot/co- pilot and the battlefront at the same time. The recorded video clips were subdivided into the intervals of 5 sec- onds and used to analyze the actions of captain pilot/co - pilot for each task. 3.1. Analysis of Mission Run-Time Setting the standard for dividing t he amount of time was quite important to verify the significance of the time re- quired for each mission according to the different types of experiments. The missions required to enact the sce- nario ar e shown bel ow in Table 4. Inter val s wher e t he pi lot e xp erie nced a huge c hange o f action were more subdivided and i ntervals where the pilot experienced a trivial change of action were combined. The data of captain pilot in the four experiments were 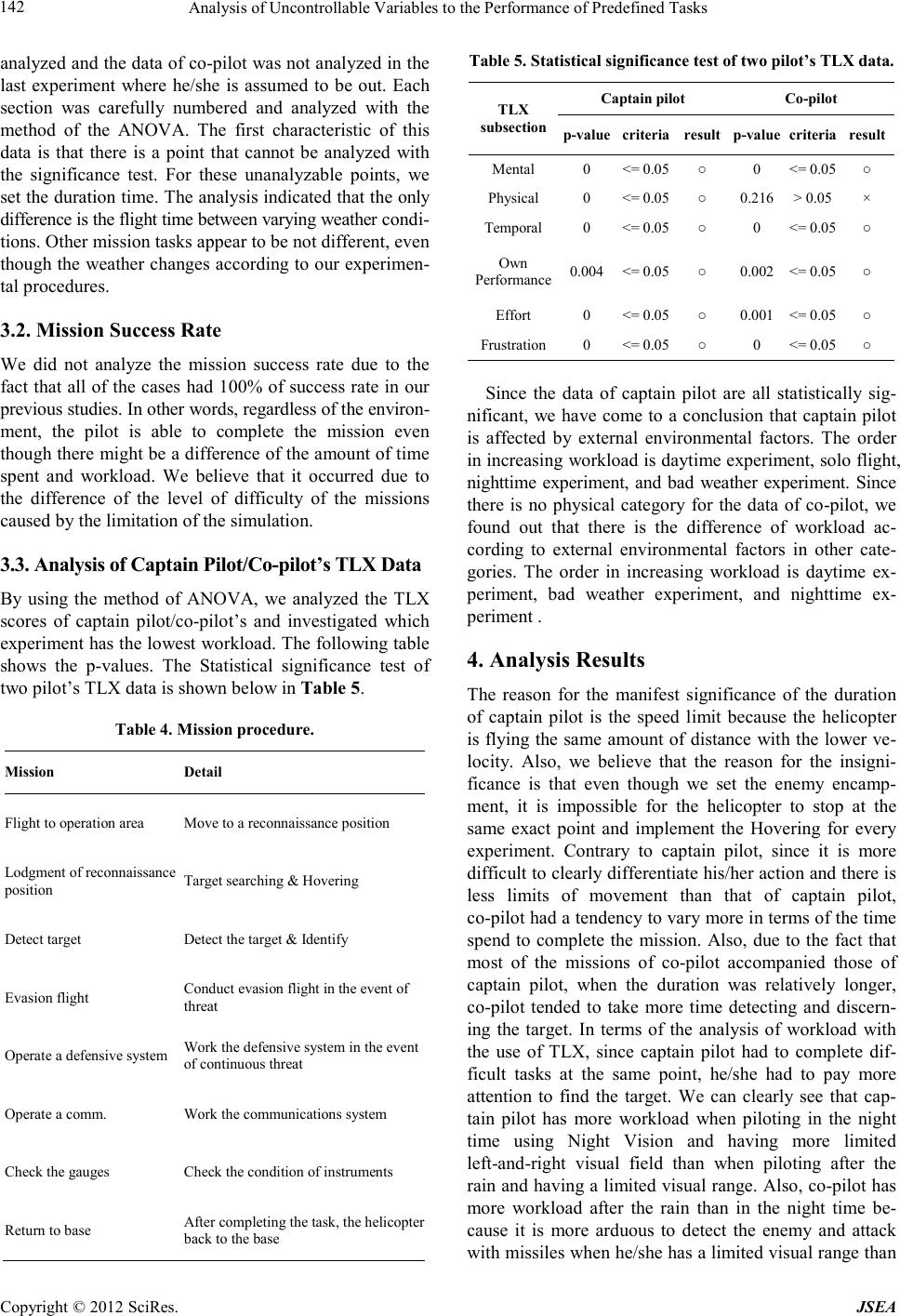 Analysis of Uncontrollable Variables to the Performance of Predef ined Tasks Copyright © 2012 SciR es. JSEA 142 analyzed and the data of co-pilot was no t ana lyzed in the last experiment where he/she is assumed to be out. Each section was carefully numbered and analyzed with the method of the ANOVA. The first characteristic of this data is that there is a point that cannot be analyzed with the significance test. For these unanalyzable points, we set the duration time. The analysis indicated that the only difference is the flight time between varying weather cond i- tions. Other mission tasks appear to be not different, even thou gh the weather c hanges a ccor ding to our experi men- tal procedures. 3.2. Mission Success Rate We did not analyze the mission success rate due to the fact that all of the cases had 100% of success rate in our previous studies. In other word s, regardless of the environ- ment, the pilot is able to complete the mission even though there might be a difference of the amount of time spent and workload. We believe that it occurred due to the difference of the level of difficulty of the missions caused b y the limitation of the simulation. 3.3. Analysis of Captain Pilot/Co-pilot’s TLX Data By using the method of ANOVA, we analyzed the TLX scores of captain pilot/co-pilot’s and investigated which expe riment has t he lo west wo rkload . T he follo wing ta ble shows the p-values. The Statistical significance test of two pilot’s TLX da ta is s hown below in Table 5 . Table 4. Mis sion procedure. Mission Detail Flight to operation area Move to a reconnaissance position Lodgment of reconnaissance posi tion Target searching & Hovering Detect target Detect the target & Identify Evasion fligh t Conduct evasion flight in the event of threat Operate a defensi v e system Work the defensi v e system in t he eve nt of continuous threat Operate a co m m. Work the communications system Ch eck the gauges Check the condition of instrum ents Return to bas e After completing the task, the helicopter back to the base Table 5. Statistical significance test of two pilot’s TLX data. TLX subsection Captain pilot Co-pilot p-value criteria result p-value criteria result Mental 0 <= 0.05 ○ 0 <= 0. 05 ○ Physical 0 <= 0.05 ○ 0.216 > 0.05 × Temporal 0 <= 0.05 ○ 0 <= 0. 05 ○ Own Performance 0.004 <= 0.05 ○ 0.002 <= 0. 0 5 ○ Effort 0 <= 0.05 ○ 0.001 <= 0.05 ○ Frustration 0 <= 0.05 ○ 0 <= 0. 05 ○ Since the data of captain pilot are all statistically sig- nificant, we have come to a conclusion that captain pilot is affected by external environmental factors. The order in incr easin g worklo ad is dayti me experiment, solo flight, nighttime experiment, and bad weather experiment. Since there is no physical category for the data of co-pilot, we found out that there is the difference of workload ac- cording to external environmental factors in other cate- gories. The order in increasing workload is daytime ex- perimen t, bad weather experiment, and nighttime ex- periment . 4. Analysis Results The reason for the manifest significance of the duration of captain pilot is the speed limit because the helicopter is flyi ng the same amount of distance with the lo wer ve- locity. Also, we believe that the reason for the insigni- ficance is that even though we set the enemy encamp- ment, it is impossible for the helicopter to stop at the same exact point and implement the Hovering for every experiment. Contrary to captain pilot, since it is more difficult to cle arly dif ferentiate his/her action and there is less limits of movement than that of captain pilot, co-pilo t had a te nde ncy to var y mor e i n ter ms o f t he ti me spend to co mplete the mission. Also, due to the fact that most of the missions of co-pilot accompanied those of captain pilot, when the duration was relatively longer, co-pilot tended to take more time detecting and discern- ing the target. In terms of the analysis of workload with the use of TLX, since captain pilot had to complete dif- ficult tasks at the same point, he/she had to pay more attention to find the target. We can clearly see that cap- tain pilot has more workload when piloting in the night time using Night Vision and having more limited left-and-right visual field than when piloting after the rain a nd having a li mited visual r ange. Also, co-pilo t has more workload after the rain than in the night time be- cause it is more arduous to detect the enemy and attack with missiles when he/she has a limited vis ual range than 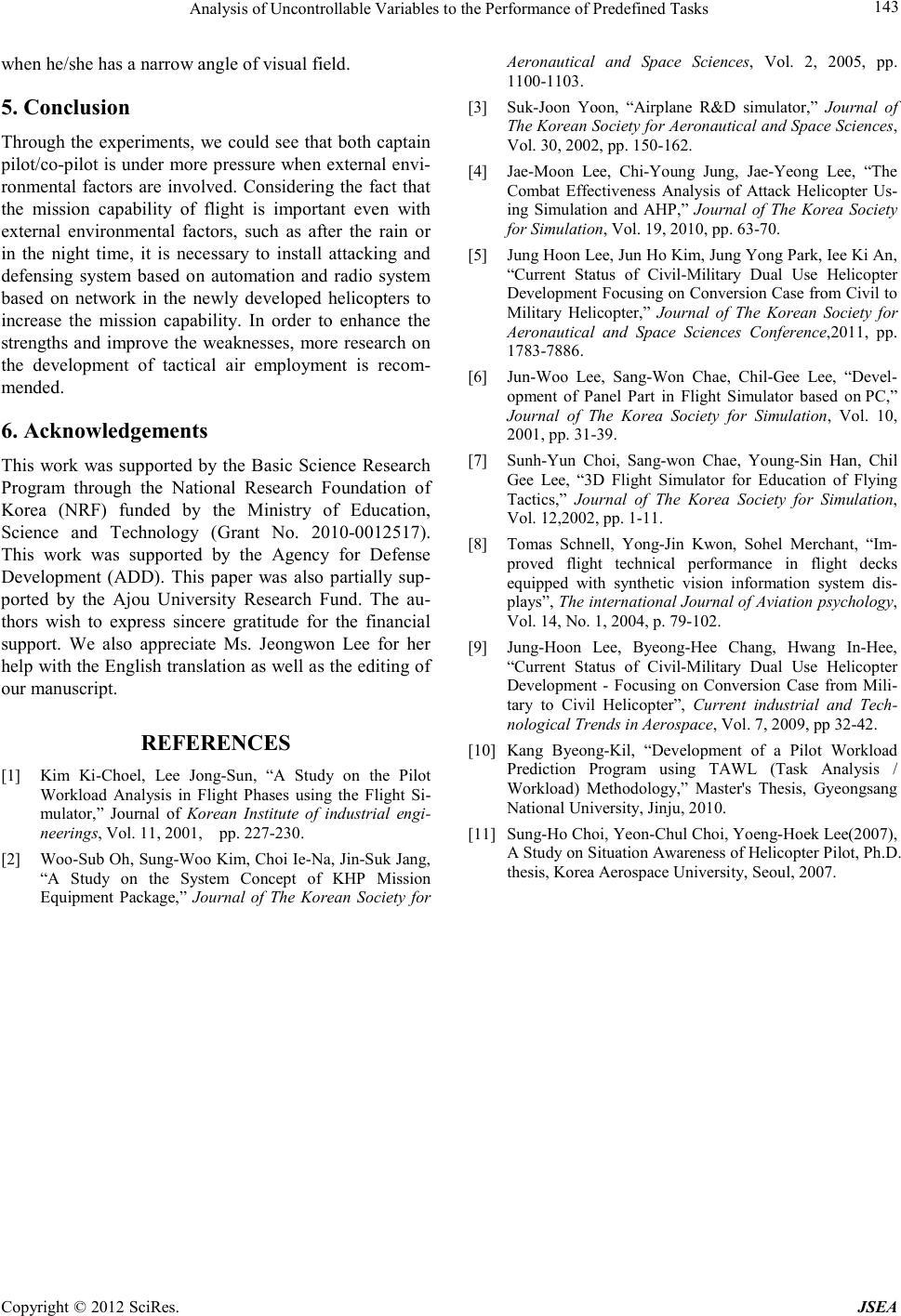 Analysis of Uncontrollable Variables to the Performance of Predef ined Tasks Copyright © 2012 SciR es. JSEA 143 when he/she has a narrow angle of visual field. 5. Conclusion Through the experiments, we could see that both captain pilot/co-pilot is under more pressure when external envi- ronmental factors are involved. Considering the fact that the mission capability of flight is important even with external environmental factors, such as after the rain or in the night time, it is necessary to install attacking and defensing system based on automation and radio system based on network in the newly developed helicopters to increase the mission capability. In order to enhance the strengths and improve the weaknesses, more research on the development of tactical air employment is recom- mended. 6. Acknowledgement s This work was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (Grant No. 2010-0012517). This work was supported by the Agency for Defense Development (ADD). This paper was also partially sup- ported by the Ajou University Research Fund . The au- thors wish to express sincere gratitude for the financial support. We also appreciate Ms. Jeongwon Lee for her help with the E nglish translatio n as well as the editin g of ou r man usc rip t. REFERENCES [1] Kim Ki-Choel, Lee Jong-Sun, “A Study on the Pilot Workload Analysis in Flight Phases using the Flight Si- mulator,” Journal of Korean Institute of industrial engi- neerings, V ol. 11, 2001, p p. 22 7-230. [2] Woo-Sub Oh, Sung-Woo Kim, Choi Ie-Na, Jin -Suk Jang, “A Study on the System Concept of KHP Mission Equipment Package,” Journal of The Korean Society for Aeronautical and Space Sciences, Vol. 2, 2005, pp. 1100-1103. [3] Suk-Joon Yoon, “Airplane R&D simulator,” Journal of The Korean Society for Aeronautical and Space Sciences, Vol. 30, 20 02, pp. 15 0-162. [4] Jae-Moon Lee, Chi-Young Jung, Jae-Yeong Lee, “The Combat Effectiveness Analysis of Attack Helicopter Us- ing Simulation and AHP,” Journal of The Korea Society for Simulation, V ol . 19, 2010, pp. 63-70. [5] Jung Hoon Lee, Jun Ho Kim, Jung Yong Park, Iee Ki An, “Current Status of Civil-Military Dual Use Helicopter Development Focusing on Conversion Case from Civil to Military Helicopter,” Journal of The Korean Society for Aeronautical and Space Sciences Conference,2011, pp. 1783-7886. [6] Jun -Woo Lee, Sang-Won Chae, Chil-Gee Lee, “Devel- opment of Panel Part in Flight Simulator based on PC,” Journal of The Korea Society for Simulation, Vol. 10, 2001, pp . 31-39. [7] Sunh-Yun Choi, Sang-won Chae, Young-Sin Han, Chil Gee Lee, “3D Flight Simulator for Education of Flying Tactics,” Journal of The Korea Society for Simulation, Vol. 12,2002, pp. 1-11. [8] Tomas Schnell, Yong-Jin Kwon, Sohel Merchant, “Im- proved flight technical performance in flight decks equipped with synthetic vision information system dis- plays”, The international Journal of Aviation psychology, Vol. 14, No. 1, 2004, p. 79-102. [9] Jung-Hoon Lee, Byeong-Hee Chang, Hwang In-Hee, “Current Status of Civil-Military Dual Use Helicopter Development - Focusing on Conversion Case from Mili- tary to Civil Helicopter”, Current industrial and Tech- nological Trends in Aerospace, Vol. 7, 2009, pp 32-42. [10] Kang Byeong-Kil, “Development of a Pilot Workload Prediction Program using TAWL (Task Analysis / Workload) Methodology,” Master's Thesis, Gyeongsang National University, Jinju, 2010. [11] Sung-Ho Cho i, Ye on-Chul Choi , Yoeng-Hoek Lee(2007), A Study on Situation Awareness of Helicopter Pilot, Ph.D. thesis, Korea Aeros pace Univers ity, Seoul, 2007. |