A. SHENDGE, N. NAGAOKA
Copyright © 2013 SciRes. CS
19
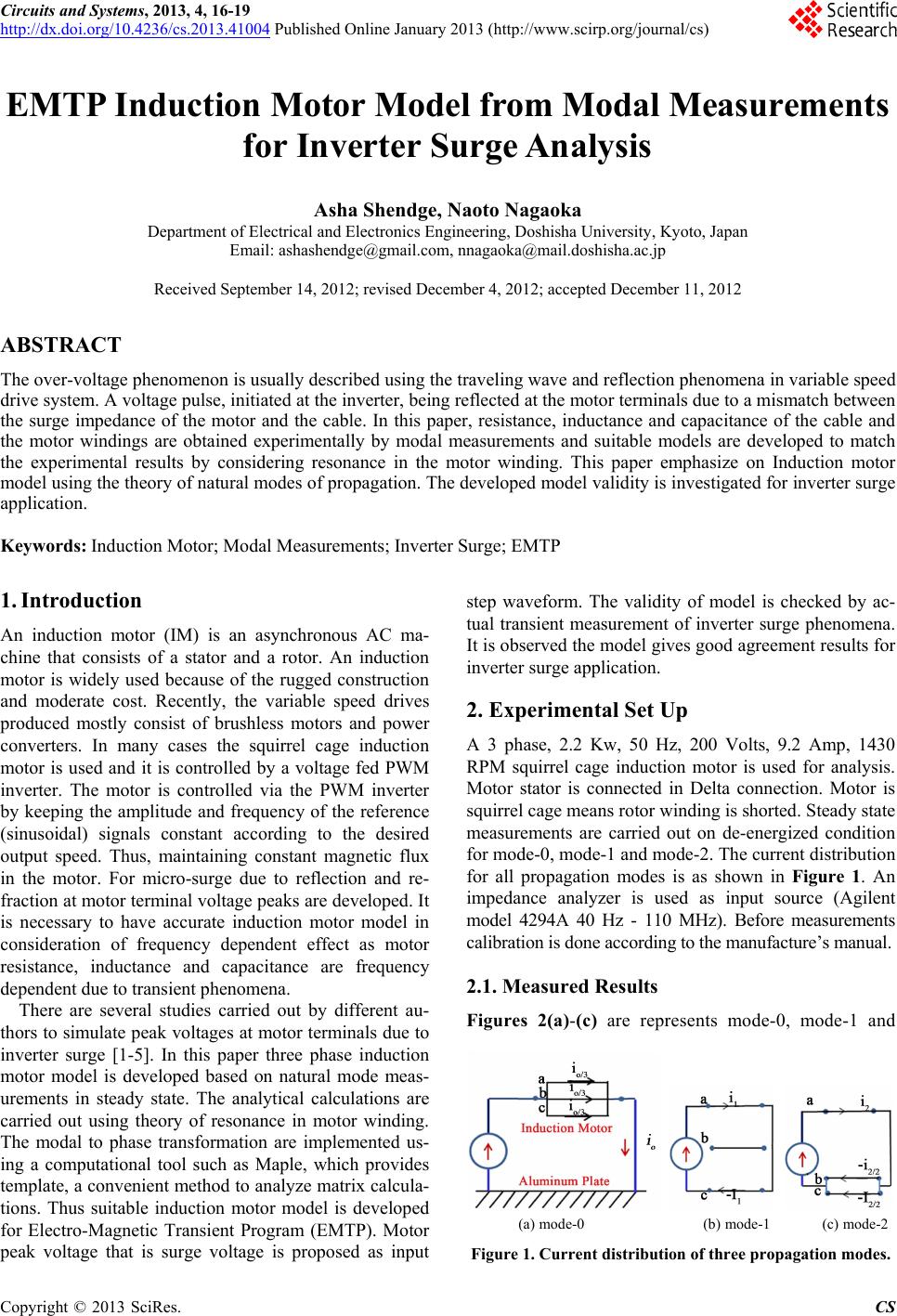
Figure 7. Surge voltage at motor terminal.
Thus, it should be clear that a transient associated with a
cabtyre cable can be simulated well by proposed method
in co-operation with Semlyen’s line model of the EMTP.
4. Conclusion
In this paper, based on natural theory of modes meas-
urements are carried out on induction motor in steady
state condition. Based on modal measurements induction
motor model is developed for it’s used in Electro Mag-
netic Transient Program. The validity of model is invest-
tigated by practical inverter surge measurements. It is
observed using developed model the surge voltages at
motor terminals can be represented accurately. This model
can be used for different switching surge simulations.
5. Acknowledgements
The financial support provided by Japanese Government
(MONBUKAGAKUSHO: Ministry of Education, Cul-
ture, Sports, Science and Technology—MEXT) Scholar-
ship has made this research possible and it is greatly ap-
preciated.
REFERENCES
[1] H. Paula, M. L. R. Chaves, D. A. Andrade, J. L. Domin-
gos and M. A. A. Freitas, “A New Strategy for Differen-
tial over Voltages and Common Mode Currents Determi-
nation in PWM Induction Motor Drives,” IEEE Interna-
tional Conference on Electric Machines and Drives, San
Antonio, 15 May 2005, pp. 1075-1081,
[2] L. A. Saunders, G. L. Skibinski, S. T. Evon and D. L.
Kempkes, “Riding the Reflected Wave—IGBT Drive
Technology Demands New Motor and Cable Considera-
tions,” IEEE 43rd IAS Annual Meeting, Philadelphia,
23-25 September 1996, pp.75-84.
[3] F. Moreira, T. A. Lipo, G. Venkataramanan and S. Bernet,
“High Frequency Modeling for Cable and Induction Mo-
tor Overvoltage Studies in Long Cable Drives,” IEEE
Transactions on Industry Applications, Vol. 38, No. 5,
2002, pp. 1297-1306. doi:10.1109/TIA.2002.802920
[4] J. C. Oliveira, R. J. Paulsen, M. A. Amaral and D.
Andrade, “Electrical Transmission System with Variable
Frequency through Long Length Cable,” Offshore Tech-
nology Conference, Houston, 6-9 May 1996.
doi:10.4043/8058-MS
[5] T. Makato, W. Kotaro, O. Hisashi, M. Hirataka and N.
Nagaoka, “Analysis of Propagation of the Inverter Volt-
age and Electric Cable Surge,” Institute of Electrical En-
gineers Japan Transaction on Power and Energy, Vol.
126, No. 6, 2006, pp. 771-777.
[6] W. Scott-Mayer, “EMTP Rule Book,” Bonneville Power
Administration, Portland, 1984.
[7] L. M. Wedepohl, “Application of Matrix Methods to the
Solution of Travelling-Wave Phenomena in Polyphase
Systems,” Proceedings of the Institution of Electrical En-
gineers, Vol. 110, No. 12, 1963, pp. 2200-2212.
[8] A. Ametani, “A General Formulation of Impedance and
Admittance,” IEEE Transactions on Power Apparatus
and Systems, Vol. 99, No. 3, 1980, pp. 902-908.
[9] A. Semlyen and A. Dabuleanu, “Fast and Accurate
Switching Transients Calculations on Transmission Line
with Ground Return Using Recursive Convolution,” IEEE
Transactions on Power Apparatus and Systems, Vol. 94,
No. 2, 1975, pp. 561-571.