Paper Menu >>
Journal Menu >>
 Journal of Global Positioning Systems (2004) Vol. 3, No. 1-2: 183-190 The Application of Integrated GPS and Dead Reckoning Positioning in Automotive Intelligent Navigation System Qingquan Li Wuhan University Luoyu Road 129, Wuhan,Hubei, P.R.China e-mail: qqli@whu.edu.cn Tel: + 86(27)6875651; Fax: +86(27)68756661 Zhixiang Fang Wuhan University Luoyu Road 129, Wuhan,Hubei, P.R.China e-mail: fang_zhi_xiang@163.com Tel: + 86(27)68778222; Fax: +86(27)68778222 Hanwu Li Wuhan University Luoyu Road 129, Wuhan,Hubei, P.R.China e-mail: lihw@whu.edu.cn Tel: + 86(27)68771974; Fax: +86(27)68778222 Received: 15 Nov 2004 / Accepted: 3 Feb 2005 Abstract. The applications of Global Positioning System (GPS) are increasingly widespread in China. GPS positioning is more and more popular. Especially, the automotive navigation system which relies on GPS and Dead Reckoning technology is developing quickly because of the anticipated huge future market in China. In this paper a practical combined positioning model of GPS/DR is put forward. This model designed for automotive navigation system makes use of a Kalman filter to improve position and map matching veracity by means of filtering the raw GPS and DR signals. In practical examples, the validity of the model is illustrated. Several experiments and their results of integrated GPS/DR positioning in automotive navigation system will show that a Kalman Filter based on integrated GPS/DR position is necessary, feasible and efficient for automotive navigation application. Certainly, this combined positioning model, similar to other models, can not resolve all situation issues. In the paper, the applicable principles of the model are given and the advantages and disadvantages of this model are compared with other positioning models. Finally, suggestions are given for further improving integrated GPS/DR system performance, and the application aspects of integrated GPS/DR technology in the automotive navigation system are summarized. Key words: GPS; Dead Reckoning; Kalman Filter; Automotive Navigation System 1 Introduction With the increasing popularity of automotive consumption in China, the intelligent automotive navigation system is more and more popular in daily life and provides convenient guidance for driving in large cities. Generally, the system relies on GPS in positioning. The real-time positioning information which is provided by GPS is very important for the phonetic broadcasting and map display of the automotive navigation system. However, in automotive navigation there are a lot of factors which will restrict and influence the positioning results which solely depend on GPS: (1). Because of edifices and skyscrapers, built-up streets in the city, the GPS signals are so weak that the positioning errors are too large to be tolerant. (2). The multi-path effects of GPS signals are very serious in the city, which cause the computative error of GPS positioning to be extremely large. (3). At the crossroads, trestles, tunnels and underpasses in the city, the GPS signals are too weak to be tracked. The above factors limit the continuity of navigation information provided by the vehicle based GPS system, which add difficulties to real-time vehicle navigation. In order to resolve this problem, many researchers have put forward various solutions. For example, Fang et al.  184 Journal of Global Positioning Systems (1996, 1998, 1999) and Wang (1997) put forward the Kalman Filter model for GPS/odometer/magnetic compass/DR integration. Wu (1997, 1998), Zheng et al. (1999) and Xiong et al. (1997) have brought forward the Kalman Filter model for GPS/odometer/Gyro/DR integration, while Liu et al. (1995) and Chen et al.(1997) have proposed the Kalman Filter model for GPS/INS combination. Borenstein et al. (1994) have done the similar researches. Commonly they placed emphasis on the requirements of real-time calculation and the choices of combined coefficients and dimensions at the stage of model design. In the process of developing automotive navigation products, an integrated positioning model is developed to improve position accuracy. 2 The Integrated GPS/DR/MM Positioning Model In this paper an integrated GPS/DR/MM positioning model is put forward. This model is used to overcome the limitation that the GPS positioning is null or weak in the navigation system, when the vehicle travels through the downtown, tunnel, underpass and crossroad etc. So the navigation system model will provide the most reasonable intelligent navigation services for users 2.1The Integrated GPS/DR Positioning Model The basic principles of the integrated GPS/DR/MM positioning system are that the integrated GPS and DR positioning system provides basic positioning information, which will be corrected with the assistance of map matching to improve the accuracy and reliability of integrated positioning as much as possible. In many literatures the positioning model has been discussed (e.g., Fang, 1998; Fang et al., 1999; Wu et al., 1999; Fang et al., 1999; Wu, 1999; Xiong, 1997; Liu, 1995; Chen, 1997). The integrated GPS/DR positioning model is discussed and used more (Fang, 1998; Fang et al., 1999; Wu et al., 1999; Fang et al., 1999]. The states of the integrated GPS/DR navigation System are given as (Fang, 1998). [,,, ,,, ,] T ee nn XeVanVa ε ψ = (1 ) Here: e and n are the eastward and northward location components of vehicles, e V and n V are the eastward and northward components of velocity, e a and n a are the eastward and northward components of acceleration respectively, ε is the drift errors of velocity gyro and ψ is the calibrated coefficient of the odometer. According to the definition of the state variable, the initiative variable can be defined as follows: [,,,,, ,] T en ee nn XVaaVaa εψ = 。。。。。 , (2) Then we can process the data with the following statistical equations: FX U WX= 。 ++ (t) (3) Here: the formula can be showed as: 100000 0 0010000 0 1 000000 0 0000100 0 0000010 0 1 000000 0 1 000 0 0 00 0000000 0 e e e eae e n nn nn an V e a V aa Vn aV aa ε τ τε εψ τ ψ 00 ⎛⎞ ⎛⎞ ⎜⎟ ⎜⎟ ⎜⎟ ⎛⎞ ⎜⎟ ⎜⎟ ⎜⎟ − ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ =+ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ −⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ −⎝⎠ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎝⎠ ⎝⎠ 。 。 。 。 0 0 0 0 0 0 0 0 0 e ae ae an n an a w w a w w ε ψ τ τ ⎛⎞ ⎜⎟ ⎛⎞ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ +⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎝⎠ ⎜⎟ ⎜⎟ ⎝⎠ (4) ae w,an w,w ε and w ψ are the white noises of ( ) ( ) ( )( ) 2222 ,,,,,,, ae an oooo ε ψ σ σσσ respectively; ae τ and an τ are the correlated time constants of vehicle acceleration change rates; e a,n a are the average values of eastward and northward acceleration respectively, ε τ is the equivalent time constant in first order Markov process of the velocity gyro drift. 2.2The Integrated GPS/DR/MM Positioning Model The basic idea of the model is to get preliminary position information according to the GPS/DR positioning model, then extract possible information of all road sections from an existing digital map, including road section direction sets, distance sets, road section knots and lines sets, etc, and project the preliminary results onto the most probable line. Afterwards, the rationality of the results is evaluated according to certain evaluation function and corrected statistical equation. The evaluation result is likely to be: 1: 0: 1 :{|0,1,1,2, 3} 2: 3: Nomal NULL iExacti i Depature OnRoadWay − ⎧ ⎪ ⎪ ⎪ ∂=∂= − ⎨ ⎪ ⎪ ⎪ ⎩ (5) Here, -1-- maintain the original state, 0--null, 1--correct map matching, 2--departure from the navigation path, 3-- running normally on the right navigation path.  Li et al: The Application of Integrated GPS and Dead Reckoning Positioning 185 Basic information for map matching, such as current road section location and orientation, the matching precision in the normal distribution and etc, are supplemented into the above statistical equation for forming Kalman Filter Equation. A maximum likelihood estimate of this equation is used as the positioning value so that the positioning rationality is improved. In the following, we lay emphasis on the formation of the model. 2.3 Model For mation According to the conception of the integrated GPS/DR/MM navigation system, the observations of the integrated vehicle GPS/DR/MM navigation system should include:(1) the GPS positioning location ( ) ,l λ ,(2) the change rate of vehicle course and angular velocity ω (3) the distance S of the vehicle odometer within the adopted period T, (4) the distance (Ds ) on the road section that vehicle runs, the orientation ( θ ) of current road section, and the last matching result components , XY DDand confidence k (%). Therefore, the observation component of the system can be defined as: 1 ev λ =+ (6) 2 lnv=+ (7) 1 22 n eneen ne vvava tg tv vv ω ω ω εε εε − ⎡⎤ ⎛⎞ − ∂ =++=++ ⎢⎥ ⎜⎟ ∂+ ⎢⎥ ⎝⎠ ⎣⎦ (8) 22 n es sTvv ψ ε =++ (9) Ds =0 Ds +S (10) 0*cos() XX DDS θ =+ (11) 0*sin( ) yy DD S θ =+ (12) max(| 0)min(*) k krdi rdi RKinDP=<<= (13) k R refers to the matching road result with the confidence K, Krdi is the reliable results of the i-th alternative road near the location point, Drdi is the distance from preliminary position to the i-th road (point L(, XY DD)) and P is the possible area to the i-th road. The determination rules for value P are shown as: P = 0: when the road is inaccessible to the vehicle, P is set as 0 P = 1/n: when vehicle is on the road but the distance between the vehicle and the exit of the road is in the tolerance range, P is set as the probability of subsequent road. P = 1: when the vehicle is on the road for sure Here we should consider the following factors when determining the positioning weight P: (1) Use the direction of the road as the initial direction value of the computation; (2) Use the first matching point on the road as the initial point of reckoning location to calculate the distance running on the road; (3) Estimate the varieties of road direction and gyro direction to determine the scope of angle change ahead, which will be easy to pre-process the signal of gyro; (4) P is set as 1 when we can be sure that the vehicle has entered a road section; and when the distance between the vehicle and the end of the road is in tolerance range (for example 50 meters), it is necessary to extract all the alternative roads in order to judge which road the vehicle will run on. P is set as the reciprocal of the number of the alternative roads; (5) The weights of all neighbouring roads (main stem, auxiliary road, circle etc) can be set 0 when we are sure that the vehicle has entered a road section. So the error equation can be written as: 1 2 22 22 0 0 ()[, ()]() 1 *cos( ) *sin() (*) n n ne en e s e xX yy kkrdi ev nv lva va vv s Z thtXtVt Tv vS Ds DD S DD S Ri min DP ω λ εε ω ε ψ θ θ ⎛⎞ ⎜⎟ ⎛⎞ ⎛⎞ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ − ⎜⎟ + ⎜⎟ ⎜⎟ ⎜⎟ + ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ==+ =+ ⎜⎟ +⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ⎜⎟ ∂ ⎝⎠ ⎜⎟ ⎝⎠ ⎜⎟ ⎝⎠ (14) 1 v and 2 v are the noises of GPS positioning observations measurement, ( ) ( ) 22 12 ,,,oo σ σ are Gaussian white noises, ε is the first order Markov process component in velocity gyro drift which is the component of Gaussian white noises (0, 2 ω σ ); s ε is the observation noise of the odometer output, it is (0,2 s σ ) Gaussian white noise. Therefore we can establish the model step by step according to deduction of a Kalman Filter:  186 Journal of Global Positioning Systems 1 (/( 1))(/(1))Xk kk k ϕ ∧−= − (15) ( )(/(1))( )[( )[ ,(/(1))]]XkXkkKkZkhkXkk ∧∧ ∧ =−+ −− (16) (/ 1)(/(1))(1)(/(1)) T PKKK KPKK K ϕϕ −=−−− (17) 1 ()(/(1)) ()[()(/(1)) ()()] TT KkPk KHKHKPk KHKRK − =−− + (18) ()[( )()](/(1))PKIKkHk PkK=−− (19) [, ((1))] () (( 1)) T hK X KK HK XKK ∂− =∂− (20) 3 Combined Positioning Algorithm From the above analysis, an extended combined positioning algorithm is put forward in this section. In this algorithm, different weights are assigned to different factors: GPS subsystem is corresponding to coefficient of information βB1, DR sub system is coefficient βB2, and map information is coefficient βB3(βB1B+βB2B+βB3B=1). So the combined positioning Kalman Filter can be illustrated as Fig.1: Fig 1. The Federated Kalman Filter structure of the integrated GPS/DR/MM navigation system Local filter 1 (LF1) in Fig.1 is a standard Kalman Filter. Its dynamic equation is: (1)()()1()1() 11 ()() ()() 111 1 kkkUkWk XX kkkk V ZHX φ +=+ + =+ (21) Local filter 2 (LF2) in Fig.1 is the corresponding nonlinear Kalman Filter of DR system. Its dynamic equation is: (1) ()()2()2() 22 () [, ()]() 22 2 kkkUkWk XX khk kk V ZX φ +=+ + =+ (22) In the same way, we can get local filter 3(LF3) (1) ()()3()3() 33 () [, ()]() 33 3 kkkUkWk XX khk kk V ZX φ + =++ =+ (23) So the whole filter algorithm is: rdi {LF1,LF2,LF3} Max({K| 0i<n})< Alternative road3 1/ β Road estimation , θ α Filtering signal 'V ω ,'Vs ,2 1/ β Corrected signal Corrected signal Filtering signal 1 ',',1/ status status BL β θ ,, XY DD,k R Local filter LF1 Local filter LF2 Local filter LF3 Gyro signal V ω B、L、Status Map information ,,Roads θ α GPS si g nal Odometer signal Vs 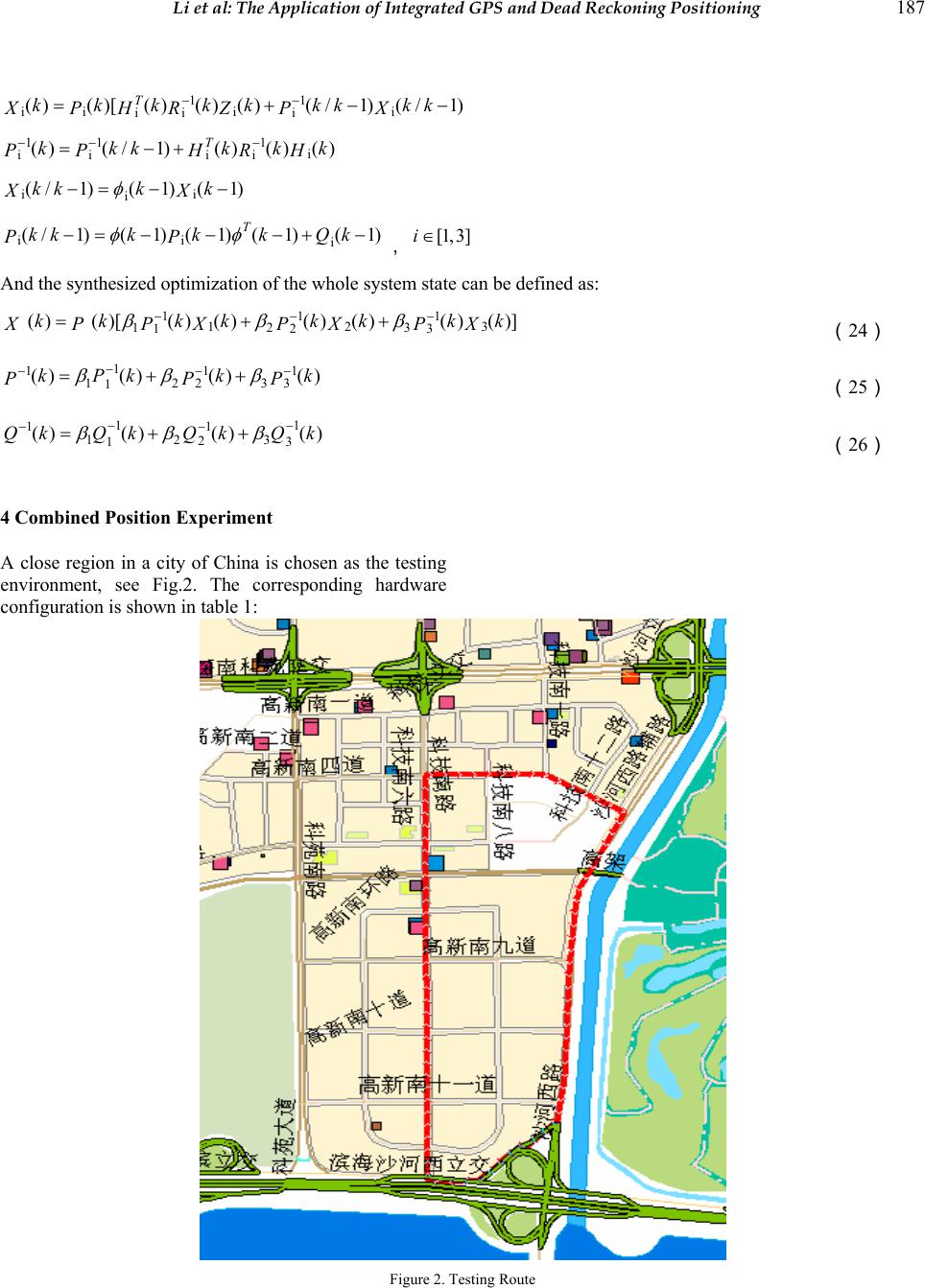 Li et al: The Application of Integrated GPS and Dead Reckoning Positioning 187 11 ii ii ii i ()()[()()()( /1)( /1) T kkkkk kkkk XPHRZP X −− =+−− 11 1 i ii ii ()(/1)()()() T kkkkkk PP HRH −− − =−+ ii i (/1)(1)(1)kkkk XX φ −= −− ii i (/1)( 1)( 1)( 1)( 1) T kkk kkk Q PP φφ −= −−−+−, [1, 3]i ∈ And the synthesized optimization of the whole system state can be defined as: 11 1 123 12 3 123 ()()[() ()()()()()]kk kkkkkk X PPXPXPX ββ β −−− =++ (24) 1 111 23 123 1 () ()()()kkkkP PPP βββ − −−− =+ + (25) 1 1 11 23 12 13 ()()() ()kkkQkQ QQ βββ − − −− =+ + (26) 4 Combined Position Expe r iment A close region in a city of China is chosen as the testing environment, see Fig.2. The corresponding hardware configuration is shown in table 1: Figure 2. Testing Route  188 Journal of Global Positioning Systems Tab. 1 List of hardware collocations for test. Item Configuration main frequency 166MHz chip SH4 memory 64M CF card 128M GPS Gamin 15 GYRO Matsushita Vehicle Buick commercial Tab. 2 The Parameters of Positioning Equipments Parameters related to positioning equipment are shown in Table 2. The positioning state of GPS receiver is checked here. Fig. 3 shows the drift track of GPS positioning at a given position over a long period of time; Fig. 4 is the satellite distribution. In Fig. 3, we can see that the positioning state of GPS is not satisfactory, and there are noticeable drifts. The satellite visibility of the GPS module is satisfactory. In most cases, it allows for simultaneous visibility of 4 satellites with distinct signals. Thereby after filtering processing, GPS Observation can meet the requirements for dynamic vehicle navigation. Fig 3. GPS Positioning Drift Fig. 4 Satellite Distribution Figs.5-8 illustrate the deviation between recorded track and road feature points in different cases. Whether based on standalone GPS positioning or the integrated GPS/DR/MM positioning, accuracy of positioning in X- axis or Y-axis direction is not significant. But the deviations of positioning based on the two different methods are distinct. The positioning error of points can be greatly improved after GPS/DR/MM matching (normally the method can make the accuracy increase by 30%). In rare cases there will be large matching errors. This is mainly because, in the crossroads, there are several choices, and various values can be obtained with the map matching algorithm. According to the optimization rules, the most possible road is chosen based only on the signal value matching. 22. 522 22. 524 22. 526 22. 528 22. 53 22. 532 22. 534 22. 536 22. 538 22. 54 22. 542 113.94113.94 5 113.95113.95 5 GPS ROAD GPS/ DR/MM Fig 5. Trajectory The navigation test program of integrated GPS/DR/MM positioning model is realized in this paper based on item Parameter GPS Positioning precision <50m Normally Startup time 20s GYRO Sensitivity [22.5,27.5]mV/( 1 .s − D) Sensitivity drift [-5.0% ,5.0%] Zero Point Drift [-10% ,10%] Linearity [-5.0% ,5.0%] Working temperature [-40,85] C D  Li et al: The Application of Integrated GPS and Dead Reckoning Positioning 189 WinCE operation systems, and in the experiment the vehicle moving tracks in various cases are recorded. It is obvious that in comparatively straight places whether single GPS positioning or integrated GPS/DR/MM positioning is adopted we can always get well matched results. In the curved road section, however, there will be distinct deviations if we use standalone GPS positioning model which can be greatly improved with integrated GPS/DR/MM model. 5 Conclusion s To solve the positioning problem in the vehicle navigation, a universal model of integrated GPS/DR/MM positioning is discussed in this paper. In the cities, it is important to improve GPS positioning precision by the model in the cases when GPS positioning signals are too weak, such as in the downtown areas, tunnels, underpasses, crossroads, etc. Obviously, forming the model will take up computing resources of the system more or less and the interaction with navigation digital map is frequent. The setting of the parameters of this model depends on experience to some extent, so appropriate parameters can be determined only after many trials. These parameters are quite different in digital map databases with different precisions. In the future study, we will consider the design and application of an adaptive positioning model X 113. 94 113. 942 113. 944 113. 946 113. 948 113. 95 113. 952 113. 954 13579111315 1719 21 GPS ROAD GPS/ DR/ MM Fig 6. Deviation in X-axis Y 22. 515 22. 52 22. 525 22. 53 22. 535 22. 54 22. 545 13579111315171921 GPS ROAD GPS/ DR/ MM Fig 7. Deviation in Y-axis 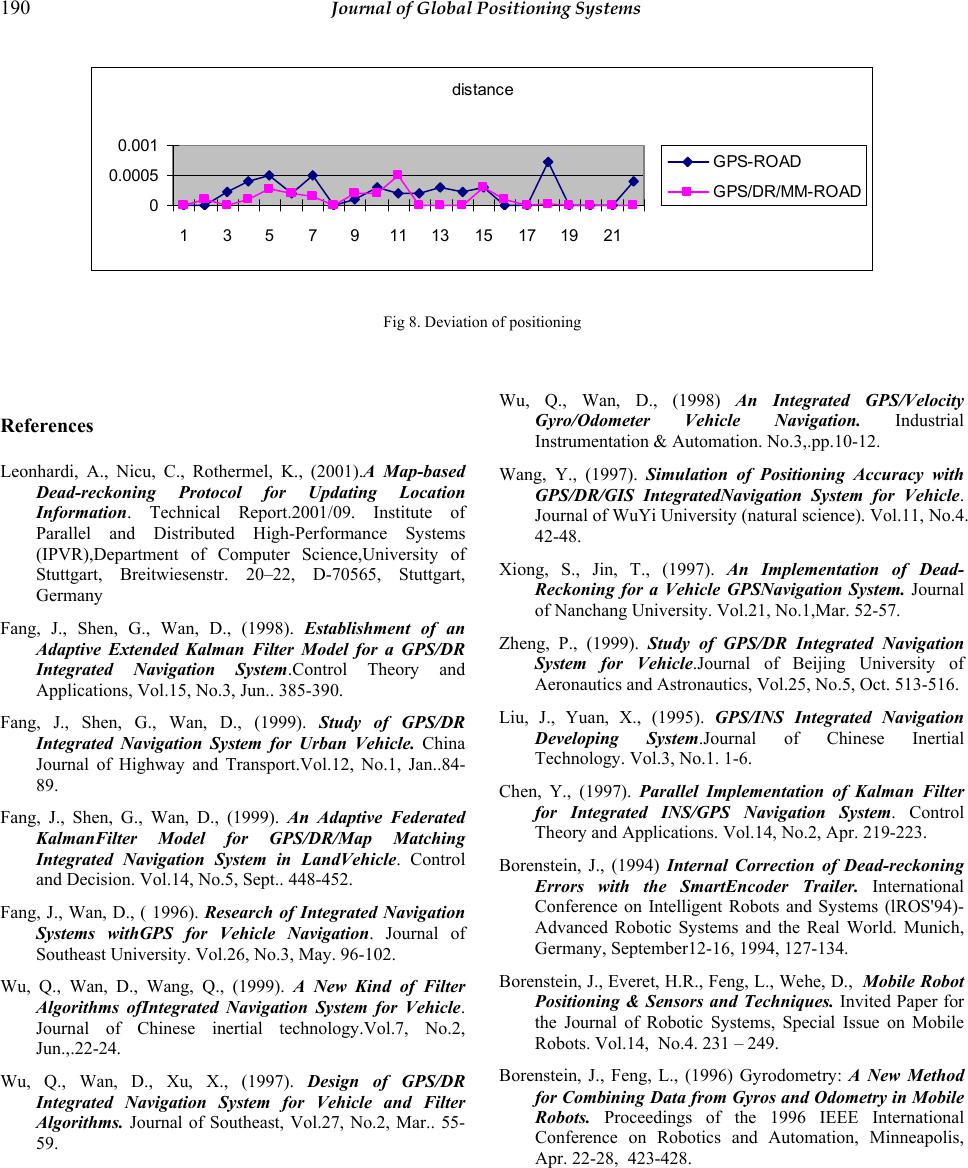 190 Journal of Global Positioning Systems distance 0 0.0005 0.001 13 57 9111315171921 GPS-ROAD GPS/DR/MM-ROAD Fig 8. Deviation of positioning References Leonhardi, A., Nicu, C., Rothermel, K., (2001).A Map-based Dead-reckoning Protocol for Updating Location Information. Technical Report.2001/09. Institute of Parallel and Distributed High-Performance Systems (IPVR),Department of Computer Science,University of Stuttgart, Breitwiesenstr. 20–22, D-70565, Stuttgart, Germany Fang, J., Shen, G., Wan, D., (1998). Establishment of an Adaptive Extended Kalman Filter Model for a GPS/DR Integrated Navigation System.Control Theory and Applications, Vol.15, No.3, Jun.. 385-390. Fang, J., Shen, G., Wan, D., (1999). Study of GPS/DR Integrated Navigation System for Urban Vehicle. China Journal of Highway and Transport.Vol.12, No.1, Jan..84- 89. Fang, J., Shen, G., Wan, D., (1999). An Adaptive Federated KalmanFilter Model for GPS/DR/Map Matching Integrated Navigation System in LandVehicle. Control and Decision. Vol.14, No.5, Sept.. 448-452. Fang, J., Wan, D., ( 1996). Research of Integrated Navigation Systems withGPS for Vehicle Navigation. Journal of Southeast University. Vol.26, No.3, May. 96-102. Wu, Q., Wan, D., Wang, Q., (1999). A New Kind of Filter Algorithms ofIntegrated Navigation System for Vehicle. Journal of Chinese inertial technology.Vol.7, No.2, Jun.,.22-24. Wu, Q., Wan, D., Xu, X., (1997). Design of GPS/DR Integrated Navigation System for Vehicle and Filter Algorithms. Journal of Southeast, Vol.27, No.2, Mar.. 55- 59. Wu, Q., Wan, D., (1998) An Integrated GPS/Velocity Gyro/Odometer Vehicle Navigation. Industrial Instrumentation & Automation. No.3,.pp.10-12. Wang, Y., (1997). Simulation of Positioning Accuracy with GPS/DR/GIS IntegratedNavigation System for Vehicle. Journal of WuYi University (natural science). Vol.11, No.4. 42-48. Xiong, S., Jin, T., (1997). An Implementation of Dead- Reckoning for a Vehicle GPSNavigation System. Journal of Nanchang University. Vol.21, No.1,Mar. 52-57. Zheng, P., (1999). Study of GPS/DR Integrated Navigation System for Vehicle.Journal of Beijing University of Aeronautics and Astronautics, Vol.25, No.5, Oct. 513-516. Liu, J., Yuan, X., (1995). GPS/INS Integrated Navigation Developing System.Journal of Chinese Inertial Technology. Vol.3, No.1. 1-6. Chen, Y., (1997). Parallel Implementation of Kalman Filter for Integrated INS/GPS Navigation System. Control Theory and Applications. Vol.14, No.2, Apr. 219-223. Borenstein, J., (1994) Internal Correction of Dead-reckoning Errors with the SmartEncoder Trailer. International Conference on Intelligent Robots and Systems (lROS'94)- Advanced Robotic Systems and the Real World. Munich, Germany, September12-16, 1994, 127-134. Borenstein, J., Everet, H.R., Feng, L., Wehe, D., Mobile Robot Positioning & Sensors and Techniques. Invited Paper for the Journal of Robotic Systems, Special Issue on Mobile Robots. Vol.14, No.4. 231 – 249. Borenstein, J., Feng, L., (1996) Gyrodometry: A New Method for Combining Data from Gyros and Odometry in Mobile Robots. Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Minneapolis, Apr. 22-28, 423-428. |