Paper Menu >>
Journal Menu >>
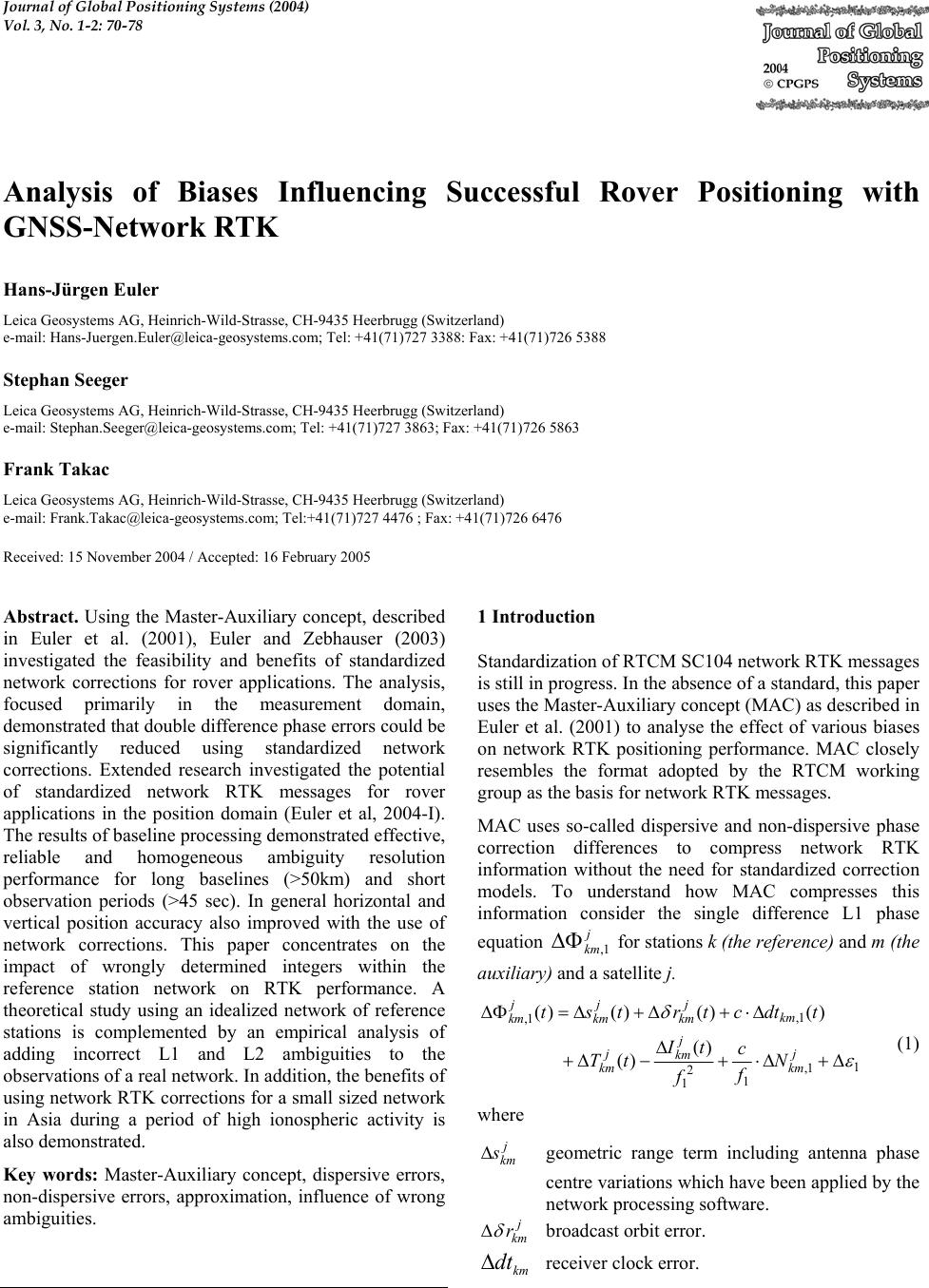 Journal of Global Positioning Systems (2004) Vol. 3, No. 1-2: 70-78 Analysis of Biases Influencing Successful Rover Positioning with GNSS-Network RTK Hans-Jürgen Euler Leica Geosystems AG, Heinrich-Wild-Strasse, CH-9435 Heerbrugg (Switzerland) e-mail: Hans-Juergen.Euler@leica-geosystems.com; Tel: +41(71)727 3388: Fax: +41(71)726 5388 Stephan Seeger Leica Geosystems AG, Heinrich-Wild-Strasse, CH-9435 Heerbrugg (Switzerland) e-mail: Stephan.Seeger@leica-geosystems.com; Tel: +41(71)727 3863; Fax: +41(71)726 5863 Frank Takac Leica Geosystems AG, Heinrich-Wild-Strasse, CH-9435 Heerbrugg (Switzerland) e-mail: Frank.Takac@leica-geosystems.com; Tel:+41(71)727 4476 ; Fax: +41(71)726 6476 Received: 15 November 2004 / Accepted: 16 February 2005 Abstract. Using the Master-Auxiliary concept, described in Euler et al. (2001), Euler and Zebhauser (2003) investigated the feasibility and benefits of standardized network corrections for rover applications. The analysis, focused primarily in the measurement domain, demonstrated that double difference phase errors could be significantly reduced using standardized network corrections. Extended research investigated the potential of standardized network RTK messages for rover applications in the position domain (Euler et al, 2004-I). The results of baseline processing demonstrated effective, reliable and homogeneous ambiguity resolution performance for long baselines (>50km) and short observation periods (>45 sec). In general horizontal and vertical position accuracy also improved with the use of network corrections. This paper concentrates on the impact of wrongly determined integers within the reference station network on RTK performance. A theoretical study using an idealized network of reference stations is complemented by an empirical analysis of adding incorrect L1 and L2 ambiguities to the observations of a real network. In addition, the benefits of using network RTK corrections for a small sized network in Asia during a period of high ionospheric activity is also demonstrated. Key words: Master-Auxiliary concept, dispersive errors, non-dispersive errors, approximation, influence of wrong ambiguities. 1 Introduction Standardization of RTCM SC104 network RTK messages is still in progress. In the absence of a standard, this paper uses the Master-Auxiliary concept (MAC) as described in Euler et al. (2001) to analyse the effect of various biases on network RTK positioning performance. MAC closely resembles the format adopted by the RTCM working group as the basis for network RTK messages. MAC uses so-called dispersive and non-dispersive phase correction differences to compress network RTK information without the need for standardized correction models. To understand how MAC compresses this information consider the single difference L1 phase equation j km 1, ∆Φ for stations k (the reference) and m (the auxiliary) and a satellite j. 1 1, 1 2 1 1, 1, )( )( )()()()( ε δ ∆+∆⋅+ ∆ −∆+ ∆⋅+∆+∆=∆Φ j km j km j km km j km j km j km N f c f tI tT tdtctrtst (1) where j km s∆ geometric range term including antenna phase centre variations which have been applied by the network processing software. j km r δ ∆ broadcast orbit error. km dt ∆ receiver clock error.  Euler et al.: Analysis of Biases Influencing Successful Rover Positioning with GNSS-Network RTK 71 j km T∆ tropospheric refraction error. j km I∆ frequency dependent ionospheric delay. j km N∆ frequency dependent integer ambiguity. ε ∆ frequency dependent random measurement error. t epoch. c speed of light. 1 f frequency of L1. Replacing the index of the frequency dependent terms with ‘2’ yields an analogous equation for the L2 single difference phase. Reducing Formula 1 by the slope distance, receiver clock error and the ambiguity term yields the ambiguity-levelled correction difference j km 1, ∆Φ δ j km km j km j km j km N f c tdtcttst 1, 1 1, 1,1, )()()()( ∆⋅+ ∆⋅+∆Φ−∆=∆Φ δ (2) The correction difference described in Formula 2 is separated into a dispersive component, consisting mainly of ionospheric refraction, and a non-dispersive component consisting primarily of tropospheric refraction and orbit errors in order to reduce the amount of data transmitted to the rover. The equations for the dispersive and non-dispersive components are given in Formula 3 and Formula 4 respectively in units of meters. j km j km dispj km ff f ff f 2, 2 1 2 2 2 2 1, 2 1 2 2 2 2 ,∆Φ − −∆Φ − =∆Φ δδδ (3) j km j km dispnonj km ff f ff f 2, 2 2 2 1 2 2 1, 2 2 2 1 2 1 , ∆Φ − − ∆Φ − =∆Φ − δ δδ (4) This alternate representation of the correction differences has some specific benefits. Unlike the correction differences described in Formula 2, changes in the dispersive and non-dispersive components vary at different rates. Non-dispersive errors change slowly over time, while dispersive errors vary more rapidly, especially in times of high ionospheric activity. Therefore, the throughput of the data-link can be maximised by optimising the individual transmission rates of the dispersive and non-dispersive observables. In addition to the correction differences, the raw carrier phase observations for the master reference station, described via RTCM v3.0 standard messages 1003 or 1004 (RTCM 2004), must also be streamed to the rover. Using the phase data of the master station and the correction differences, the rover can re-assemble and apply the raw phase information of the auxiliary stations in conventional baseline processing schemes. Alternatively, optimal correction differences can be approximated for any position in the network and used to improve the positioning performance of the rover. As with other network RTK methods that model dispersive and non-dispersive errors (e.g. VRS), MAC requires the correction differences to be related to a common integer ambiguity level (see Euler et al., 2001). An incorrectly determined L1 and/or L2 single difference ambiguity between the master and an auxiliary station will eventually manifest itself in the position solution. The effect of wrong ambiguities on network RTK positioning is the focus of the next section. 2 The Influence of Incorrect Ambiguitites on Correction Differences and the Position Solution 2.1 Impact of Wrong Ambiguities on Dispersive and Non-Dispersive Corrections Tab. 1 and Tab. 2 show how an incorrect L1 and/or L2 single difference ambiguity affects the dispersive and non-dispersive correction differences described in Formulas 3 and 4 respectively. For simplicity, the magnitude of the ambiguity error is restricted to ±1 cycle. Tab. 1. Impact of a wrong L1 (1 N∆) and/or L2 (2 N∆) single difference ambiguity on the dispersive correction difference (in units of L1 cycles). 2 N ∆ 1 N ∆ 0 +1 −1 0 0 ≈ 1.98 ≈ −1.98 +1 ≈ −1.54 ≈ 0.44 ≈ −3.53 −1 ≈ 1.54 ≈ 3.53 ≈ −0.44 The impact of wrong ambiguities on the correction difference observables depends on the combination of the L1 and L2 errors. For example, in the dispersive case (Tab. 1) a maximum error of ±3.53 L1 cycles occurs when the incorrect L1 and L2 ambiguities are of equal magnitude but opposite sign. Similarly in the non- dispersive case (Tab. 2), a maximum error of ±4.53 L1 cycles also occurs when the L1 and L2 ambiguity errors are of equal magnitude but opposite sign. The magnitude of the ambiguity error is also amplified in the correction differences when only a single L1 or L2 bias is present. In these cases, the amplification factor is in the order of approximately 2. On the contrary, a reduction in the magnitude of the correction difference errors results when the single-difference wide lane ambiguity is correct; that  72 Journal of Global Positioning Systems is, if the L1 and L2 ambiguity errors are of equal magnitude and sign. Tab. 2. Impact of a wrong L1 (1 N∆) and/or L2 (2 N∆) single difference ambiguity on the non-dispersive correction difference (in units of L1 cycles). 2 N∆ 1 N∆ 0 +1 −1 0 0 ≈ −1.98 ≈ 1.98 +1 ≈ 2.55 ≈ 0.56 ≈ 4.53 −1 ≈ −2.55 ≈ −4.53 ≈ −0.56 Normally, optimal correction differences are approximated for the rover’s position. The effect of wrong ambiguities on approximated correction differences will depend on the algorithm used to model the dispersive and non-dispersive corrections in the area bounded by the reference stations. The next section investigates the propagation of correction difference biases for a two-dimensional (2-D) linear approximation. 2.2 Approximation of Correction Differences Numerous algorithms can be employed for approximating optimal network corrections at the rover. For example, Euler et al. (2003) and Euler et al. (2004-I) compare the effectiveness of a distance weighted approximation technique with a 2-D linear plane represented by yaxaayxb L210 ),( ++= (5) where L b linear surface. i a coefficients defining the plane. y x , coordinates of the approximated point. The case of a quadratic approximation is detailed in Euler et al. (2004-II). Only the linear approximation, represented by Formula 5, will be used to approximate correction differences in this paper. To measure how wrong ambiguities at a reference station propagate to the rover in the linear case consider the hypothetical network of 6 reference stations as shown in Fig. 1. Reference stations 1 P, 3 P and 5 P lie at the vertices of an equilateral triangle ∆ and stations 2 P, 4 P, and 6 P lie at the midpoints of ∆. Due to the symmetry of the network there are only two scenarios that have to be considered in the analysis: an error introduced at one of the reference stations located at the vertices of ∆ (e.g. 1 P) and an error introduced at one of the reference stations located at the midpoints of ∆ (e.g. 2 P). Fig. 1. Hypothetical network of 6 reference stations and one rover station located at the centroid of the figure. Let the station coordinates be ),(iii yxP = where 6,,1 … = i for the reference stations and 0=i for the rover station. For simplicity, let )0,0( 0=P. If d is the distance from 0 P to 2 P, 4 P and 6 P, respectively, then the plane coordinates of the reference stations in Fig. 1 are ( ) () () () .1,0,1,3, 2 1 , 2 3 2,0, 2 1 , 2 3 ,1,3 654 321 dPdPdP dPdPdP −=−−= −= = =−= (6) Let the value given at reference station i (e.g. an L1 or L2 phase correction) be ℜ ∈ i b. We want to approximate the values i bat ),(ii yx by a function ),(yxb so that iiiibyxb ε + = ),( (7) where i ε is the approximation error. The linear approximation given in Formula 5 can be rewritten as t Laaayxyxb ),,(),,1(),( 210 ⋅= (8) Expanding the polynomial Formula 7 for all i results for ),(),( yxbyxb L = in L t LbaaaM ε +=⋅ ),,( 210 (9) where = = = 6 5 4 3 2 1 6 5 4 3 2 1 66 55 44 33 22 11 ,, 1 1 1 1 1 1 ε ε ε ε ε ε ε LL b b b b b b b yx yx yx yx yx yx M (10)  Euler et al.: Analysis of Biases Influencing Successful Rover Positioning with GNSS-Network RTK 73 The polynomial coefficients t Laaaa),,( 210 ≡ that minimize 2 L ε are given by () bMMMa t LL t LL 1 − =. (11) Substituting ),( ii yx from Formula 6 into L M yields the following expression for () t LL t LMMM 1−: () −−− −−= − dddddd dddd MMM t LL t L 15 2 15 2 15 1 15 4 15 1 15 2 0 15 32 15 3 0 15 3 15 32 6 1 6 1 6 1 6 1 6 1 6 1 1 (12) Assume that the values i b differ from the correct values i b by i b∆, i.e. iii bbb∆+= . Substituting t bbbbbb ),,(6611 ∆+∆+=∆+ … into Formula 11 leads to a natural splitting of the polynomial coefficients L a into terms L abelonging to band terms a∆belonging to b∆. () () LL t LL t LL aa bbMMMa ∆+= ∆+= − ! 1 (13) where () bMMMat LL t LL 1− = and () bMMMa t LL t LL ∆=∆−1. (14) Thus, following from Formula 8 the change in the approximated value at ),(yxP= due to the reference station biases b∆ is given by LL ayxyxb∆⋅=∆ ),,1(),( (15) The analysis is restricted to the following two cases: Case 1: error δ introduced at 1 P, i.e. t b)0,0,0,0,0,( δ =∆ Case 2: error δ introduced 2 P, i.e. t b)0,0,0,0,,0( δ =∆ . Substituting b ∆ for case 1 and case 2 into Formula 14 yields together with Formula 15 the following general expressions for the change in the approximated value at ),(yxP = : Case 1: () δ t Ldd yxyxb −⋅=∆ 15 2 , 15 32 , 6 1 ,,1),( (16) Case 2: () δ t Ldd yxyxb ⋅=∆ 15 1 , 15 3 , 6 1 ,,1),( (17) For the rover station )0,0( 0 = P, located at the centre of the network, Formulas 16 and 17 reduce to the following simplified expressions Case 1: δ 6 1 )0,0( =∆ L b Case 2: δ 6 1 )0,0( =∆ L b In fact further analysis, which has been omitted from the text for the sake of brevity, using additional reference stations placed on a circle around the rover shows that the linear approximation attenuates the introduced error by a factor of about n1 where nis the number of stations used in the network. More generally, Fig. 2 illustrates the magnitude of the approximated error for any station),( yxP = with 1 = = δ d. Note that the approximated error is largest in the vicinity of the biased station. More accurately, the magnitude of the error depends on the distance of the approximated station from the biased reference station along the line of maximum gradient. The closer the approximated station is, the larger the error. The preceding theoretical study demonstrates the propagation of reference station biases for the linear approximation; however, it does not measure the impact of these biases on the network RTK performance. To complement the theoretical study, the following section empirically investigates the actual impact of wrong ambiguities on the final position solution. 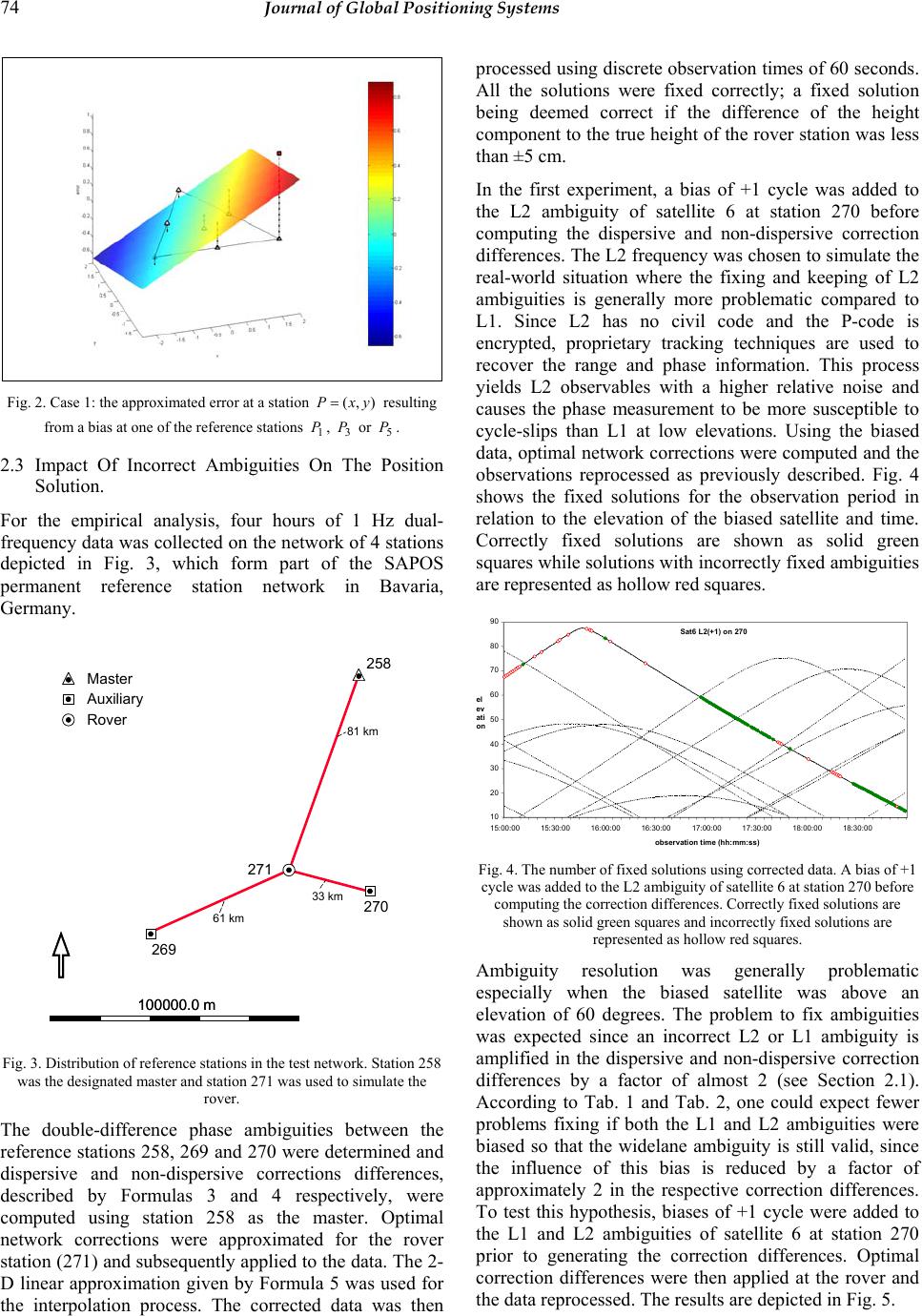 74 Journal of Global Positioning Systems Fig. 2. Case 1: the approximated error at a station ),(yxP = resulting from a bias at one of the reference stations 1 P, 3 P or 5 P. 2.3 Impact Of Incorrect Ambiguities On The Position Solution. For the empirical analysis, four hours of 1 Hz dual- frequency data was collected on the network of 4 stations depicted in Fig. 3, which form part of the SAPOS permanent reference station network in Bavaria, Germany. 33 km 81 km 61 km 100000.0 m100000.0 m 271 270 258 269 Master Auxiliary Rover Fig. 3. Distribution of reference stations in the test network. Station 258 was the designated master and station 271 was used to simulate the rover. The double-difference phase ambiguities between the reference stations 258, 269 and 270 were determined and dispersive and non-dispersive corrections differences, described by Formulas 3 and 4 respectively, were computed using station 258 as the master. Optimal network corrections were approximated for the rover station (271) and subsequently applied to the data. The 2- D linear approximation given by Formula 5 was used for the interpolation process. The corrected data was then processed using discrete observation times of 60 seconds. All the solutions were fixed correctly; a fixed solution being deemed correct if the difference of the height component to the true height of the rover station was less than ±5 cm. In the first experiment, a bias of +1 cycle was added to the L2 ambiguity of satellite 6 at station 270 before computing the dispersive and non-dispersive correction differences. The L2 frequency was chosen to simulate the real-world situation where the fixing and keeping of L2 ambiguities is generally more problematic compared to L1. Since L2 has no civil code and the P-code is encrypted, proprietary tracking techniques are used to recover the range and phase information. This process yields L2 observables with a higher relative noise and causes the phase measurement to be more susceptible to cycle-slips than L1 at low elevations. Using the biased data, optimal network corrections were computed and the observations reprocessed as previously described. Fig. 4 shows the fixed solutions for the observation period in relation to the elevation of the biased satellite and time. Correctly fixed solutions are shown as solid green squares while solutions with incorrectly fixed ambiguities are represented as hollow red squares. Sat6 L2(+1) on 270 10 20 30 40 50 60 70 80 90 15:00:00 15:30:00 16:00:00 16:30:0017:00:00 17: 30:0 0 18: 00 :00 18:30:00 observation time (hh:mm:ss) el ev ati on Fig. 4. The number of fixed solutions using corrected data. A bias of +1 cycle was added to the L2 ambiguity of satellite 6 at station 270 before computing the correction differences. Correctly fixed solutions are shown as solid green squares and incorrectly fixed solutions are represented as hollow red squares. Ambiguity resolution was generally problematic especially when the biased satellite was above an elevation of 60 degrees. The problem to fix ambiguities was expected since an incorrect L2 or L1 ambiguity is amplified in the dispersive and non-dispersive correction differences by a factor of almost 2 (see Section 2.1). According to Tab. 1 and Tab. 2, one could expect fewer problems fixing if both the L1 and L2 ambiguities were biased so that the widelane ambiguity is still valid, since the influence of this bias is reduced by a factor of approximately 2 in the respective correction differences. To test this hypothesis, biases of +1 cycle were added to the L1 and L2 ambiguities of satellite 6 at station 270 prior to generating the correction differences. Optimal correction differences were then applied at the rover and the data reprocessed. The results are depicted in Fig. 5. 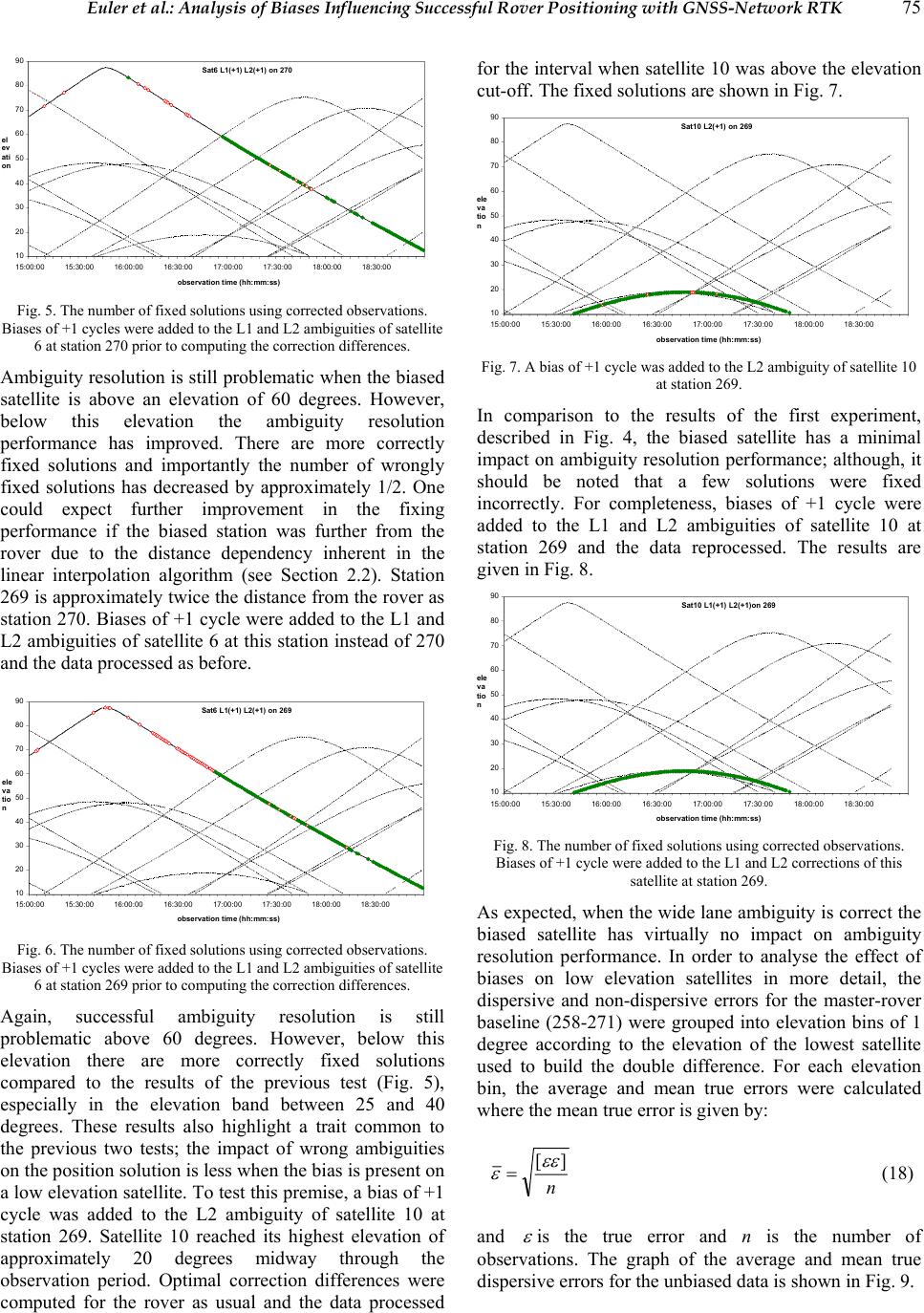 Euler et al.: Analysis of Biases Influencing Successful Rover Positioning with GNSS-Network RTK 75 Sat6 L1(+1) L2(+1) on 270 10 20 30 40 50 60 70 80 90 15:00:00 15:30 :0 0 16:00 : 0 0 16: 30 :00 17:00:00 17:30:00 18: 00 :0 0 18:30:00 observation time (hh:mm:ss) el ev ati on Fig. 5. The number of fixed solutions using corrected observations. Biases of +1 cycles were added to the L1 and L2 ambiguities of satellite 6 at station 270 prior to computing the correction differences. Ambiguity resolution is still problematic when the biased satellite is above an elevation of 60 degrees. However, below this elevation the ambiguity resolution performance has improved. There are more correctly fixed solutions and importantly the number of wrongly fixed solutions has decreased by approximately 1/2. One could expect further improvement in the fixing performance if the biased station was further from the rover due to the distance dependency inherent in the linear interpolation algorithm (see Section 2.2). Station 269 is approximately twice the distance from the rover as station 270. Biases of +1 cycle were added to the L1 and L2 ambiguities of satellite 6 at this station instead of 270 and the data processed as before. Sat6 L1(+1) L2(+1) on 269 10 20 30 40 50 60 70 80 90 15:00:00 15:30:0 0 16:00 : 0 0 16:30: 0 0 17:00:00 17: 30:00 18: 00 : 0 0 18:30 : 0 0 observation time (hh:mm:ss) ele va tio n Fig. 6. The number of fixed solutions using corrected observations. Biases of +1 cycles were added to the L1 and L2 ambiguities of satellite 6 at station 269 prior to computing the correction differences. Again, successful ambiguity resolution is still problematic above 60 degrees. However, below this elevation there are more correctly fixed solutions compared to the results of the previous test (Fig. 5), especially in the elevation band between 25 and 40 degrees. These results also highlight a trait common to the previous two tests; the impact of wrong ambiguities on the position solution is less when the bias is present on a low elevation satellite. To test this premise, a bias of +1 cycle was added to the L2 ambiguity of satellite 10 at station 269. Satellite 10 reached its highest elevation of approximately 20 degrees midway through the observation period. Optimal correction differences were computed for the rover as usual and the data processed for the interval when satellite 10 was above the elevation cut-off. The fixed solutions are shown in Fig. 7. Sat10 L2(+1) on 269 10 20 30 40 50 60 70 80 90 15:00:00 15:30:00 16:00:00 16:30:00 17:00:00 17:30 :0 0 18: 00 :0 0 18:30 :0 0 observation time (hh:mm:ss) ele v a t io n Fig. 7. A bias of +1 cycle was added to the L2 ambiguity of satellite 10 at station 269. In comparison to the results of the first experiment, described in Fig. 4, the biased satellite has a minimal impact on ambiguity resolution performance; although, it should be noted that a few solutions were fixed incorrectly. For completeness, biases of +1 cycle were added to the L1 and L2 ambiguities of satellite 10 at station 269 and the data reprocessed. The results are given in Fig. 8. Sat10 L1(+1) L2(+1)on 269 10 20 30 40 50 60 70 80 90 15:00:00 15:30:00 16:00:00 16:30:00 17:00:00 17:30 :0 0 18: 00 :0 0 18:30 :0 0 observation time (hh:mm:ss) ele v a t io n Fig. 8. The number of fixed solutions using corrected observations. Biases of +1 cycle were added to the L1 and L2 corrections of this satellite at station 269. As expected, when the wide lane ambiguity is correct the biased satellite has virtually no impact on ambiguity resolution performance. In order to analyse the effect of biases on low elevation satellites in more detail, the dispersive and non-dispersive errors for the master-rover baseline (258-271) were grouped into elevation bins of 1 degree according to the elevation of the lowest satellite used to build the double difference. For each elevation bin, the average and mean true errors were calculated where the mean true error is given by: n ][ εε ε = (18) and ε is the true error and n is the number of observations. The graph of the average and mean true dispersive errors for the unbiased data is shown in Fig. 9. 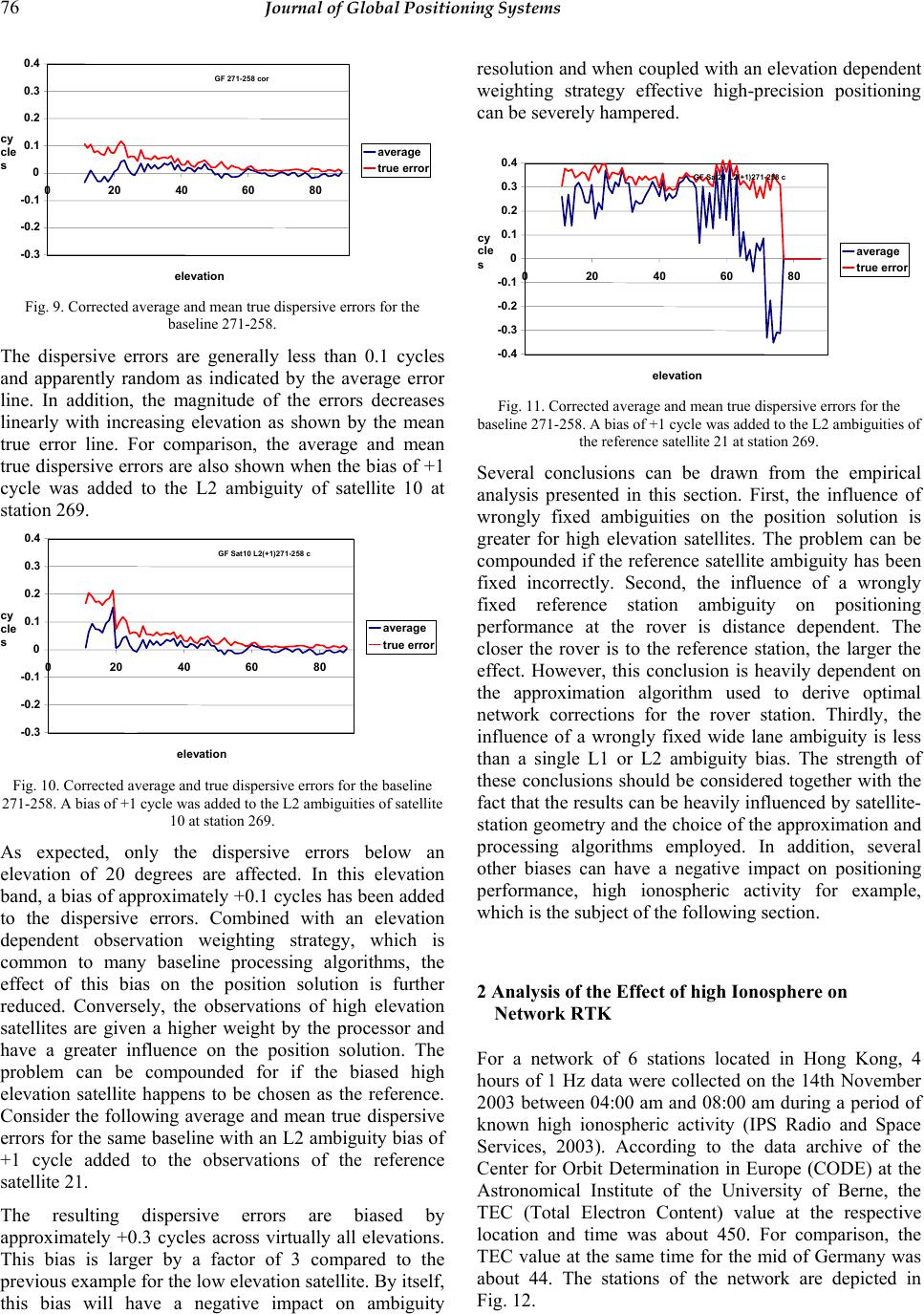 76 Journal of Global Positioning Systems GF 271-258 cor -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 20 40 60 80 elevation cy cle s average true error Fig. 9. Corrected average and mean true dispersive errors for the baseline 271-258. The dispersive errors are generally less than 0.1 cycles and apparently random as indicated by the average error line. In addition, the magnitude of the errors decreases linearly with increasing elevation as shown by the mean true error line. For comparison, the average and mean true dispersive errors are also shown when the bias of +1 cycle was added to the L2 ambiguity of satellite 10 at station 269. GF Sat10 L2(+1)271-258 c -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0 20 40 60 80 elevation cy cle s average true error Fig. 10. Corrected average and true dispersive errors for the baseline 271-258. A bias of +1 cycle was added to the L2 ambiguities of satellite 10 at station 269. As expected, only the dispersive errors below an elevation of 20 degrees are affected. In this elevation band, a bias of approximately +0.1 cycles has been added to the dispersive errors. Combined with an elevation dependent observation weighting strategy, which is common to many baseline processing algorithms, the effect of this bias on the position solution is further reduced. Conversely, the observations of high elevation satellites are given a higher weight by the processor and have a greater influence on the position solution. The problem can be compounded for if the biased high elevation satellite happens to be chosen as the reference. Consider the following average and mean true dispersive errors for the same baseline with an L2 ambiguity bias of +1 cycle added to the observations of the reference satellite 21. The resulting dispersive errors are biased by approximately +0.3 cycles across virtually all elevations. This bias is larger by a factor of 3 compared to the previous example for the low elevation satellite. By itself, this bias will have a negative impact on ambiguity resolution and when coupled with an elevation dependent weighting strategy effective high-precision positioning can be severely hampered. GF Sat21 L2(+1)271-258 c -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 020 40 60 80 elevation cy cle s average true error Fig. 11. Corrected average and mean true dispersive errors for the baseline 271-258. A bias of +1 cycle was added to the L2 ambiguities of the reference satellite 21 at station 269. Several conclusions can be drawn from the empirical analysis presented in this section. First, the influence of wrongly fixed ambiguities on the position solution is greater for high elevation satellites. The problem can be compounded if the reference satellite ambiguity has been fixed incorrectly. Second, the influence of a wrongly fixed reference station ambiguity on positioning performance at the rover is distance dependent. The closer the rover is to the reference station, the larger the effect. However, this conclusion is heavily dependent on the approximation algorithm used to derive optimal network corrections for the rover station. Thirdly, the influence of a wrongly fixed wide lane ambiguity is less than a single L1 or L2 ambiguity bias. The strength of these conclusions should be considered together with the fact that the results can be heavily influenced by satellite- station geometry and the choice of the approximation and processing algorithms employed. In addition, several other biases can have a negative impact on positioning performance, high ionospheric activity for example, which is the subject of the following section. 2 Analysis of the Effect of high Ionosphere on Network RTK For a network of 6 stations located in Hong Kong, 4 hours of 1 Hz data were collected on the 14th November 2003 between 04:00 am and 08:00 am during a period of known high ionospheric activity (IPS Radio and Space Services, 2003). According to the data archive of the Center for Orbit Determination in Europe (CODE) at the Astronomical Institute of the University of Berne, the TEC (Total Electron Content) value at the respective location and time was about 450. For comparison, the TEC value at the same time for the mid of Germany was about 44. The stations of the network are depicted in Fig. 12. 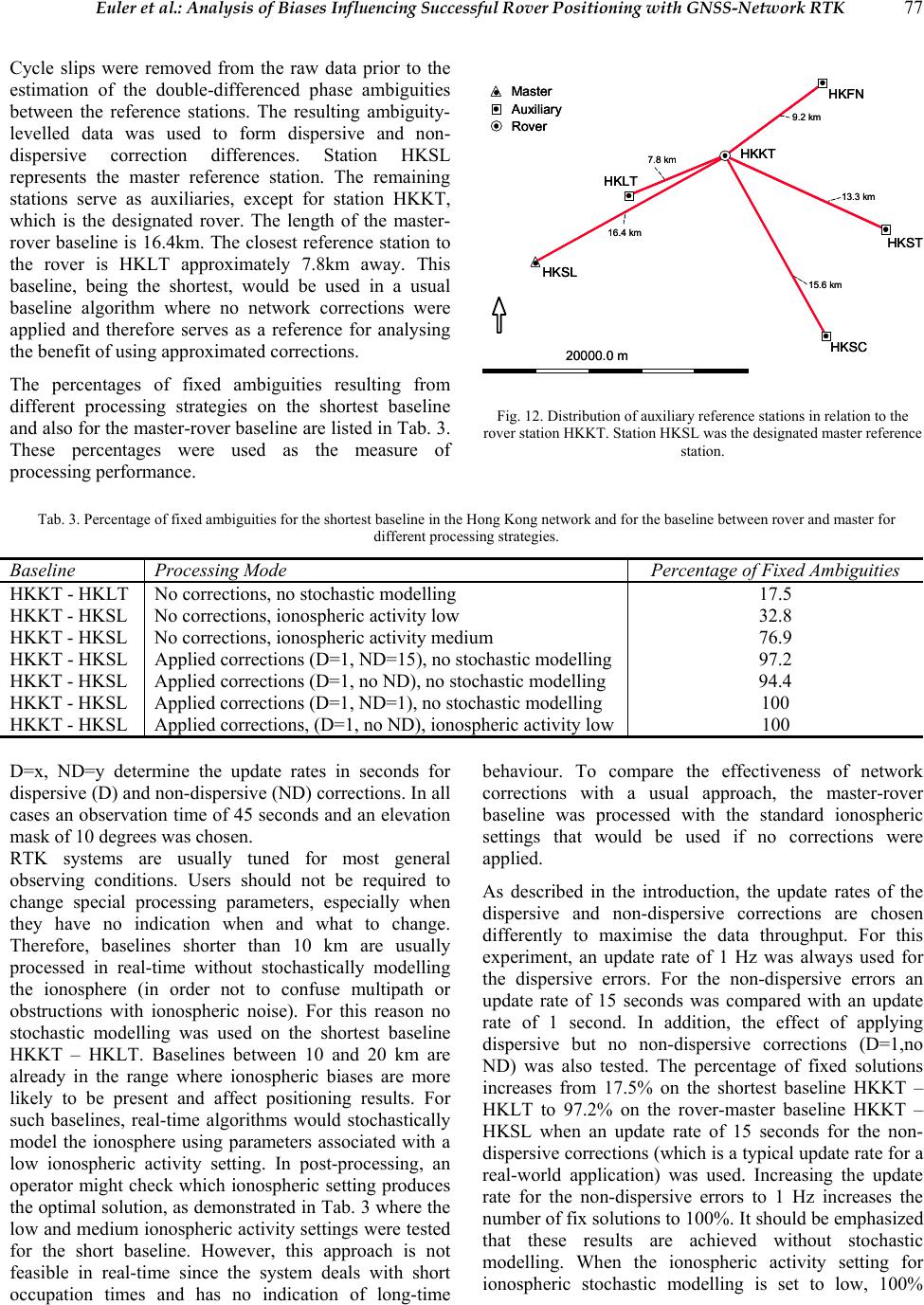 Euler et al.: Analysis of Biases Influencing Successful Rover Positioning with GNSS-Network RTK 77 Cycle slips were removed from the raw data prior to the estimation of the double-differenced phase ambiguities between the reference stations. The resulting ambiguity- levelled data was used to form dispersive and non- dispersive correction differences. Station HKSL represents the master reference station. The remaining stations serve as auxiliaries, except for station HKKT, which is the designated rover. The length of the master- rover baseline is 16.4km. The closest reference station to the rover is HKLT approximately 7.8km away. This baseline, being the shortest, would be used in a usual baseline algorithm where no network corrections were applied and therefore serves as a reference for analysing the benefit of using approximated corrections. The percentages of fixed ambiguities resulting from different processing strategies on the shortest baseline and also for the master-rover baseline are listed in Tab. 3. These percentages were used as the measure of processing performance. Master A uxiliar y Rover 20000.0 m HKSL HKLT HKKT HKFN HKST HKSC 9.2 km 13.3 km 15.6 km 7.8 km 16.4 km Master A uxiliar y Rover Master A uxiliar y Rover 20000.0 m HKSL HKLT HKKT HKFN HKST HKSC HKSL HKLT HKKT HKFN HKST HKSC 9.2 km 13.3 km 15.6 km 7.8 km 16.4 km Fig. 12. Distribution of auxiliary reference stations in relation to the rover station HKKT. Station HKSL was the designated master reference station. Tab. 3. Percentage of fixed ambiguities for the shortest baseline in the Hong Kong network and for the baseline between rover and master for different processing strategies. Baseline Processing Mode Percentage of Fixed Ambiguities HKKT - HKLT No corrections, no stochastic modelling 17.5 HKKT - HKSL No corrections, ionospheric activity low 32.8 HKKT - HKSL No corrections, ionospheric activity medium 76.9 HKKT - HKSL Applied corrections (D=1, ND=15), no stochastic modelling 97.2 HKKT - HKSL Applied corrections (D=1, no ND), no stochastic modelling 94.4 HKKT - HKSL Applied corrections (D=1, ND=1), no stochastic modelling 100 HKKT - HKSL Applied corrections, (D=1, no ND), ionospheric activity low 100 D=x, ND=y determine the update rates in seconds for dispersive (D) and non-dispersive (ND) corrections. In all cases an observation time of 45 seconds and an elevation mask of 10 degrees was chosen. RTK systems are usually tuned for most general observing conditions. Users should not be required to change special processing parameters, especially when they have no indication when and what to change. Therefore, baselines shorter than 10 km are usually processed in real-time without stochastically modelling the ionosphere (in order not to confuse multipath or obstructions with ionospheric noise). For this reason no stochastic modelling was used on the shortest baseline HKKT – HKLT. Baselines between 10 and 20 km are already in the range where ionospheric biases are more likely to be present and affect positioning results. For such baselines, real-time algorithms would stochastically model the ionosphere using parameters associated with a low ionospheric activity setting. In post-processing, an operator might check which ionospheric setting produces the optimal solution, as demonstrated in Tab. 3 where the low and medium ionospheric activity settings were tested for the short baseline. However, this approach is not feasible in real-time since the system deals with short occupation times and has no indication of long-time behaviour. To compare the effectiveness of network corrections with a usual approach, the master-rover baseline was processed with the standard ionospheric settings that would be used if no corrections were applied. As described in the introduction, the update rates of the dispersive and non-dispersive corrections are chosen differently to maximise the data throughput. For this experiment, an update rate of 1 Hz was always used for the dispersive errors. For the non-dispersive errors an update rate of 15 seconds was compared with an update rate of 1 second. In addition, the effect of applying dispersive but no non-dispersive corrections (D=1,no ND) was also tested. The percentage of fixed solutions increases from 17.5% on the shortest baseline HKKT – HKLT to 97.2% on the rover-master baseline HKKT – HKSL when an update rate of 15 seconds for the non- dispersive corrections (which is a typical update rate for a real-world application) was used. Increasing the update rate for the non-dispersive errors to 1 Hz increases the number of fix solutions to 100%. It should be emphasized that these results are achieved without stochastic modelling. When the ionospheric activity setting for ionospheric stochastic modelling is set to low, 100%  78 Journal of Global Positioning Systems fixed solutions are also obtained without any non- dispersive corrections. These results compare favourably to the 32.8% of fixed solutions obtained on the short baseline when no network corrections were applied. This analysis illustrates the benefits of using network corrections in the presence of relatively high ionospheric disturbances even for a small sized network. 3 Conclusions The effect of various combinations of wrong L1 and L2 integers on the correction difference observables, which could be introduced by either wrong initial fixing or undetected cycle slips, was tabulated and the propagation of these biases in a 2-D linear approximation was analysed for an idealized network of reference stations. The actual impact on ambiguity resolution was investigated by comparing unbiased results with computations where artificial ambiguities were added to the observations. The processing results showed that a bias on only one frequency affects the final performance of a real-time system more than when the widelane is still valid; that is when identical biases for both frequencies are present. Therefore, correction differences with a correct widelane ambiguity, which are provided for in the current RTCM SC104 network RTK message proposal, could help to fix the ambiguities of low elevation satellites. These observations may eventually have to be down-weighted. Reference station networking is usually considered as an approach for achieving better RTK performance over long baseline lengths. It is often argued that establishing a reference station network with inter-station distances of only a couple of 10kms is excessive. However the example of the Hong Kong network, with an average reference station separation of less than 15km, shows that ionospheric disturbances can be severe in equatorial regions and hamper effective positioning on baselines usually considered as unproblematic. The additional information provided by surrounding reference stations increased the performance of RTK positioning from very unfavourable, with only 32.8% fixed solutions, to high performance with a success rate of 100%. Acknowledgements. We thank Mr. Andreas Brünner of SAPOS Bayern for kindly supplying us the Bavarian data set and Mr. Simon Kwok of the Geodetic Surveying Section, Hong Kong Lands Department for the Hong Kong data set. References CODE data archive, ftp://ftp.unibe.ch/aiub/CODE/ Euler, H.-J., Keenan, C.R., Zebhauser, B. E., Wübbena, G. (2001) Study of a Simplified Approach in Utilizing Information from Permanent Reference Station Arrays, ION GPS 2001, September 11-14, 2001, Salt Lake City, UT Euler, H.-J., Zebhauser, B. E., Townsend, B., Wübbena, G. (2002) Comparison of Different Proposals for Reference Station Network Information Distribution Formats, ION GPS 2002, September 24-27, 2002, Portland, OR Euler, H.-J., Zebhauser, B.E. (2003) The Use of Standardized Network RTK Messages in Rover Applications for Surveying, ION NTM 2003, January 22-24, 2003, Anaheim, CA Euler, H.-J., Seeger, S., Zelzer, O., Takac, F., Zebhauser, B. E. (2004-I) Improvement of Positioning Performance Using Standardized Network RTK Messages, ION NTM 2004, January 26-28, 2004, San Diego, CA Euler, H.-J., Seeger, S., Takac, F. (2004-II) Influence of Diverse Biases on Network RTK, ION GNSS 2004, Long Beach, CA RTCM (2004) RTCM Recommended Standards for Differential GNSS (Global Navigation Satellite Systems) Service, Version 3.0, RTCM paper 30-2004-SC104-STD. Zebhauser, B. E., Euler, H.-J., Keenan, C.R., Wübbena, G. (2002) A Novel Approach for the Use of Information from Reference Station Networks Conforming to RTCM V2.3 and Future V3.0, ION NTM 2002, January 28-30, 2002, San Diego, CA. |