Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2012, 4, 264-272 http://dx.doi.org/10.4236/wsn.2012.411038 Published Online November 2012 (http://www.SciRP.org/journal/wsn) A Practical Target Tr acking Technique in Sensor Network Using Clustering Algorithm Luke K. Wang, Chien-Chang Wu Department of Electrical Engineering, National Kaohsiung University of Applied Sciences, Kaohsiung, Chinese Taipei Email: lwang@mail.ee.kuas.edu.tw, baseball160404@yahoo.com.tw Received August 15, 2012; revised September 16, 2012; accepted September 27, 2012 ABSTRACT Sensor network basically has many intrinsic limitations such as energy consumption, sensor coverage and connectivity, and sensor processing capability. Tracking a moving target in clusters of sensor network online with less complexity algorithm and computational burden is our ultimate goal. Particle filtering (PF) technique, augmenting handoff and K-means classification of measurement data, is proposed to tackle the tracking mission in a sensor network. The hand- off decision, an alternative to multi-hop transmission, is implemented for switching between clusters of sensor nodes through received signal strength indication (RSSI) measurements. The measurements being used in particle filter proc- essing are RSSI and time of arrival (TOA). While non-line-of-sight (NLOS) is the dominant bias in tracking estima- tion/accuracy, it can be easily resolved simply by incorporating K-means classification method in PF processing with- out any priori identification of LOS/NLOS. Simulation using clusters of sensor nodes in a sensor network is conducted. The dependency of tracking performance with computational cost versus number of particles used in PF processing is also investigated. Keywords: Sensor Network; Handoff Scheme; Particle Filter; K-means Clustering; NLOS 1. Introduction Sensor networks can be applied in a variety of areas such as target tracking, environment monitoring, military sur- veillance, medical applications, etc. [1,2]. However, the majority of sensor node platforms are operated using the low power 802.15.4 wireless technology, and its trans- mission range is extremely limited especially in an in- door environment [3]. The measurements used in the estimate of mobile locations in sensor network may in- clude received signal strength, time difference of arrival (TDOA), time of arrival (TOA), and angle of arrival (AOA) [4]. Eventually, the above propagation measure- ment scenarios are divided into two categories, line-of- sight (LOS) and non-line-of-sight (NLOS). In multi-path propagation environments, particularly indoors or urban areas, the LOS path between nodes may be obstructed [5]. However, the NLOS propagation usually leads to a posi- tive bias and causes a serious error in the results of tracking estimation [6]. Lots of attentions have been focused on the identifica- tion of LOS/NLOS condition and the mitigation of NLOS bias. A simple hypothesis test has been conducted to tell whether it’s LOS or NLOS by the fact that the standard deviation of the range measurement of NLOS is presumably larger than the LOS’ [6]. Using the individ- ual measurement detection (IMD), basically a hypothesis test to identify whether an incoming measurement is LOS or NLOS and those NLOS ones being discarded, to do target tracking is proposed [7]; extended Kalman filter (EKF) algorithm is applied accordingly to do the target tracking job. The noise modeling of LOS/NLOS is for- mulated by a two-state Markov process, and the degree of contamination by NLOS errors is correlated with the transition probability of the Markov process. A disad- vantageous effect has been indicated, the number of se- lected LOS measurements by IMD is different at each step, resulting in dimension validation of the recon- structed LOS measurement vector being dynamic; slow convergence rate is also appearing in the tracking results when using EKF. A modified Kalman filtering technique, adopting the modification at the measurement update stage, is introduced to tackle the NLOS identifica- tion/mitigation problem [8]. The NLOS positive bias is estimated directly throughout the constrained optimiza- tion method; no prior distribution knowledge of the NLOS error is needed, as claimed by the authors. Our proposed tracking algorithm utilizes clusters of sensor network with handoff scheme in a heterogeneous wireless environment. A handoff scheme specified in IEEE 802.11 network is the process whereby a mobile station shifts its association from one access point (AP) to another [9]. When a mobile station moves out of the C opyright © 2012 SciRes. WSN  L. K. WANG, C.-C. WU 265 range of an AP and into another’s, the handoff occurs during which there is an exchange of management frames [10]. On the other hand, clustering analysis is the method of unsupervised learning. It may include two parts, namely, partitional clustering and hierarchical clustering. Parti- tional clustering is a set of objects classified into K clus- ters without hierarchical structure [11]. The clustering method with PF can reduce the degradation of NLOS propagation efficacy in tracking estimation results. Meanwhile, handoff scheme is applied in the clusters of sensor network. In clusters of sensor network, each clus- ter has numbers of sensor nodes, including TOA and RSSI sensors. Figure 1 shows the proposed architecture that illustrates an event of target tracking in clusters of sensor network. The general approach to processing the LOS/NLOS signals in cellular communication network is to deter- mine whether it’s a LOS or NLOS condition. Even the fuzzy inference scheme is introduced to tell whether it is LOS or NLOS before any processing jobs can be done [10]. It is combined with adaptive Kalman filter to estab- lish mobile location estimator; undoubtedly, system and computational complexities are increasing so tremen- dously, hindering the potentials in real-time applications. We present an architecture which utilizes clustering analysis method with particle filter (PF) to track a mov- ing target. Particle filter implements sequential Monte Carlo simulation based on a set of particles to construct prior density with associated weights for the approxima- tion of posterior density. The beneficial features of the proposed scenario are listed as bellows, Intuitive but feasible for real-time applications due to its low system and computational complexity attrib- utes Figure 1. The proposed architecture in clusters of sensor network. No need to identify whether it is under LOS or NLOS condition prior to any processing of the target loca- tion estimation Only RSSI and TOA sensor measurements are re- quired, practical and low-cost; fingerprinting scheme, the build-up of a “radio map” database [6], and extra hardware (sophisticated measurement devices) are not employed, always leading to a low complexity, cost- effective scenario. Both K-means clustering and hand-off schemes are incorporated into the particle filter, minimizing the system complexity to the most. This analysis is set up as follows. The target’s motion model and the associated measurement equation and NLOS propagation are described in Section 2. Particle filter is described in Section 3. Section 4 discusses the proposed tracking algorithm which includes the handoff scheme. The proposed tracking algorithm with clustering method is derived in Section 5. The simulation and per- formance analysis are presented in Section 6. Section 7 includes the conclusion. 2. Motion Models We assume a mobile target’s movement is on a two-di- mensional (2-D) plane. Besides, the measurement of signal propagation with LOS/NLOS conditions may be modeled as a two-state Markov process if the perform- ance at transient stage is under investigation. 2.1. Target Model The moving target’s state vector is defined as T 1,kkkkk x xyy x, consisting of position and velocity at a time instant k, where ()T stands for transpose opera- tion of matrix. The target’s motion is modeled as 1,11,11,1 kkk wA xx (1) where 12 s A IA 1 01 s s T A and I2 is the 2 2 identity matrix; is the Kronecker product operator; A1 is the state transition matrix; s Tis the sampling time; and is a zero mean white Gaussian noise process with covariance matrix Q1, i.e., 1, 1k w 1, 11 ~0, k wNQ . The covariance matrix Q1 is T 11,1,12kk s QEwwqI Q 32 2 32 2 ss s ss TT QTT where q1 is a scalar which determines the intensity of the Copyright © 2012 SciRes. WSN  L. K. WANG, C.-C. WU 266 process noise and E[ ] is the expectation. An alternative motion model may be described as be- lo k (2) Here w, 2,2 2,12,1kk Aw xx T 2,k kkkkkk x xxyyy x; , kk x y represents e position of the target; , kk x y th and , kk x y target denote the velocity and acceleration ongalong the x and y directions, respectively. The transition matrix A2 is given by f the movi 2 22 12 01 00 1 ss s TT AI T Here . The covariance matrix Q2 is av 2, 12 ~0, k wNQ transformingailable by a continuous-time stochastic target model into an equivalent discrete-time model [12]: 2232 s QqIQ 543 432 2 32 20 8 6 83 62 sss ssss ss s TT 2QT TT TT T Here q2 is a scalar determining the intensity of the pr 2.2. Measurement Model s stationary, and its state T ocess noise. Assume that our sensor node i vector is ,, jjj ixiyi s ss the ith sensor node in the jth cluster zone. The measure- ment equation corresponding to TOA data can be formu- lated as: j iTOA ki cD s x (3) where c is the propagation speed of the transmitted signal; xk is the state vector of the moving target; and i is the propagation time. The measurement equation wiNLOS propagation error is shown as below, th N LOS kk k zh xk . (4) The measurement function h() models t (5) Here the random variable nlos has been mo large scale of covariance value, usually hund v he TOA through the ith sensor; vk is the measurement noise process inde- pendent of w1,k−1, w2,k−1, and any other sensor noise source; and the measurement noise is modeled by a zero mean Gaussian white noise N (0,R). NLOSk is the NLOS propagation error at the sampling instant k, modeled by a two modes/states Markov process [13]. Therefore the propagation error, NLOSk, is 0, i f LOS present NLOS , if NLOS present. knlos deled by a red of me- ters, of statistical distribution. An alternative measure- ment model may be employed [12], kkk kk zh bnlosGnx (6) where 0,if LOS presents 1,if NLOS presents k b 0.5 NLOS ,if LOS presents ,if NLOS presents m k m G bk is a binary sequence, modeled by a two-state, LOS and NLOS, discrete-time Markov chain process and m is the mportance sampling ith some numbers of typical standard deviation of LOS. 3. Particle Filter Pr oc essing Particle filter is based on sequential i (SIS) to estimate the system state w particles with their associated weightings. Particle filter- ing can be arranged to process the nonlinear and non- Gaussian systems, and it has become an important alter- native to the extended Kalman filter (EKF) [14]. There are five processing stages in the implementation of PF, i.e., initialization, particle propagation, weighting com- putation, resampling, and estimation [14]. First of all, particles are drawn from a proposal distribution at the initialization step, where each particle possesses initial weights. Then, the particle propagation is based on the EKF to produce next state’s distribution. At the weight- ing computation step, particle weights are set equal to the ratio of probability distributions from the proposal dis- tribution. The update equation of particle weighting can be shown as [14] 1 iii kk kk ii k pzxpx x ww 1 1, kii kk k qx x z (7) where the quantity ()ik denotes it is the ith sampling time instant; q() is an importance density, particle at kth which can generate particles xi; and the likelihood func- tion i kk pz xis formulated by multivariate Gaussian distribution, 1 11 ˆˆ exp T kk pzxz zRz z 2 2π k kkk k n k R (8) where ˆ ˆk zhx utilize resam with (^) standing for estimate value. Here we pling strategy to eliminate part w weighti icles with longs, and duplicates particles with larger weighting. At the final step, it needs to calculate the cen- ter of gravity from a group of samples. The PF algorithm Copyright © 2012 SciRes. WSN  L. K. WANG, C.-C. WU 267 is summarized as below, Particle Filter Algorithm Step 1. Initialization Draw initial samples ~ 00 i x qx . Set the weig 1/N where icles us PF processing. agation on hting of particles, 0 i w, equal to N is the number of parted in Step 2. Particle Prop Predict the next state of particles and update each par- ticle by using EKF technique. Step 3. Weighting Computati Update the weightings with likelihood function 1 ii i kk kk wwpzx . Normalize the weighting for each particle =1 . kNi k iw i iw k w Step 4. Resampli n g N j where =1 ,N ii kk i xw eff threshold =1 =1 if resampling , else , end jj kk N ii kk i NN xw xw eff 1var i k NN w particles and var() stands is the effective num- ber of for taking the vari- ance while Nthreshold is the prescribed threshold, usually as 2/3 of the particle num k chosen ber. Step 5. Estimation Calculate the mean of particles with their associated . Nii weightings, ˆk 1ik x wx Tracking 4. Algorithm The handoff scheme is applied to clusters of sensor net- nal strength measurements , and each cluster of RSSI work, using the received sig generated by the moving target sensors provides the signal strength indications to switch on/off the handoff. For formulating the signal strength measurements, let j k be the signal strength received by a moving target from jth RSSI sensor at the kth sampling instant. The re the ceived signal strengths can be modeled as a function of distance plus a logarithmic of the shadowing compo- nent [15], i.e., dbm jjj kkk p (9) 10 log j j kj pd k (10) whers the local signal power at instan ej k pi t; the kth sampling is the path loss index; j is a co mined by transmitted power, waveleng t nstant deter- th, and antenna gain ofhe jth RSSI sensor; j k d is the distance between the moving target and the jth RSSI sensor; andj k is the logarithm of the shadow fading, modeled by a zero mean Gaussian random process. Handoff is triggered only if the current signal strength drops below a user-defined threshold Δ, and any other RSSI sensor’s strength is strr than that oft on c onge if kr the curren e. Here 1 k E is defined as the event with handoff being triggered, and 0 k E is the non-handoff situation [15,16], that is, 1 0 if krc E E (11) where c to is the receive strength at mng tar- get due current RSSI sennd d signal sor a ovi r is the received poweoving target ownio ance R sen- r t r at mng t refereSSI sor othehan the current one. The conditional cost func- tion is therefore defined 11, if 0, if c rk CE (12) c Handoff will be activated starting from tt RSSI sensor to the candidate , when t he curren onehe cost function 1 rk CE is equal to 1 [15]oth Equations) and (1 The can . If b (11 2) are not satisfied, it means that there is no handoff needed. didate cluster of sensor network is chosen by handoff decision, and measurements can be expressed as j kk zz . Here the measurements follow Eqn (4), a uatio n e to be d the given TOA measurement would be used in parti- cle filter processing. Through PF processing, likelihoods hav changed accordingly with handoff decision for each particle, j i kk kk pz xpz x. 5. Tracking with K-Means Algorithm The use of K-means method is to cluster theasure- ing 2. - ith nui- ial cents, are e m ack ure meric. In roid ment residual to be used in PF. The flowchart of tr algorithm with clustering method is shown in Fig 5.1. K-means Clustering Method K-means clustering is an unsupervised learning, compu tationally efficient for large datasets w tially, K samples, serving as the init chosen at random from the whole sample space to ap- proximate the centroids of initial clusters. The cluster centroid is typically the mean of the data in the cluster. Let 12 ,,, L y yyy be the dataset; ml is the cen- troid of cluster Cl with Nl data points. The calculation of the centroid of clusters is described as below, 1 ,1,2,, . lll mlk NC y y (13) where k is the number of clusters. First, initialize the Copyright © 2012 SciRes. WSN 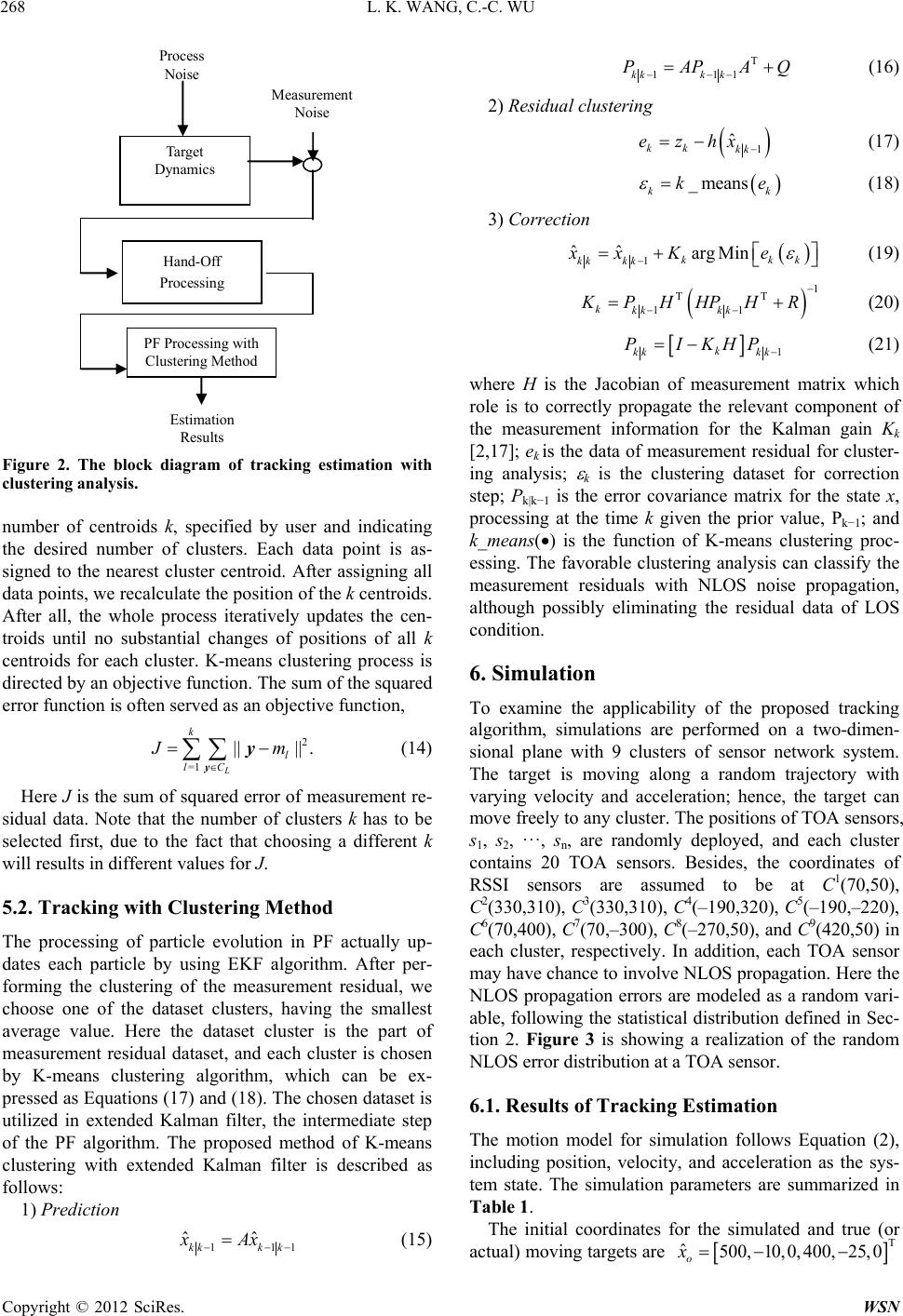 L. K. WANG, C.-C. WU 268 Target Dynamics Process Noise Hand-Off Processing PF Processing with Clustering Method Estimation Results Measurement Noise Figure 2. The block diagram of tracking estimation with clustering analysis. number of centroids k, specified by user andndicating st cluster centroid. After assigning all ata points, we recalculate the position of the k centroids. e- sidual data. Note that the number of clusters k has to be selected first, due to the fact that choosi will results in different values for J. lgorithm. After per- esidual, we he smallest i the desired number of clusters. Each data point is as- signed to the neare d After all, the whole process iteratively updates the cen- troids until no substantial changes of positions of all k centroids for each cluster. K-means clustering process is directed by an objective function. The sum of the squared error function is often served as an objective function, 2 =1 |||| . L k l lC Jm y y (14) Here J is the sum of squared error of measurement r ng a different k 5.2. Tracking with Clustering Method The processing of particle evolution in PF actually up- dates each particle by using EKF a forming the clustering of the measurement r choose one of the dataset clusters, having t average value. Here the dataset cluster is the part of measurement residual dataset, and each cluster is chosen by K-means clustering algorithm, which can be ex- pressed as Equations (17) and (18). The chosen dataset is utilized in extended Kalman filter, the intermediate step of the PF algorithm. The proposed method of K-means clustering with extended Kalman filter is described as follows: 1) Prediction 111 ˆˆ kkk k xAx (15) T 111kkk k PAPAQ (16) 2) Residual clustering (17) 1 ˆ kk kk ezhx e _ means kk k (18) 3) Correction kk 1 ˆˆ arg Min k kk kk xx Ke (19) 1 TT 11 kkk kk PHHPH R (20) K 1 k kk kk PIKHP where H is the Jacobian of measurement matrix which role is to correctly propagate the relevant com the measurement information for the Kalman gain K [2,17]; ek is the data of measurement resi ulations are performed on a two-dimen- sional plane with 9 clusters of sensor network system. ving along a random trajectory with n as the sys- tem state. The simulation parameters are summarized in (21) ponent of k dual for cluster- ing analysis; k is the clustering dataset for correction step; Pk|k−1 is the error covariance matrix for the state x, processing at the time k given the prior value, Pk−1; and k_means() is the function of K-means clustering proc- essing. The favorable clustering analysis can classify the measurement residuals with NLOS noise propagation, although possibly eliminating the residual data of LOS condition. 6. Simulation To examine the applicability of the proposed tracking algorithm, sim The target is mo varying velocity and acceleration; hence, the target can move freely to any cluster. The positions of TOA sensors, s1, s2, ···, sn, are randomly deployed, and each cluster contains 20 TOA sensors. Besides, the coordinates of RSSI sensors are assumed to be at C1(70,50), C2(330,310), C3(330,310), C4(–190,320), C5(–190,–220), C6(70,400), C7(70,–300), C8(–270,50), and C9(420,50) in each cluster, respectively. In addition, each TOA sensor may have chance to involve NLOS propagation. Here the NLOS propagation errors are modeled as a random vari- able, following the statistical distribution defined in Sec- tion 2. Figure 3 is showing a realization of the random NLOS error distribution at a TOA sensor. 6.1. Results of Tracking Estimation The motion model for simulation follows Equation (2), including position, velocity, and acceleratio Table 1. The initial coordinates for the simulated and true (or actual) moving targets are T ˆ500,10,0, 400,25, 0 o x Copyright © 2012 SciRes. WSN 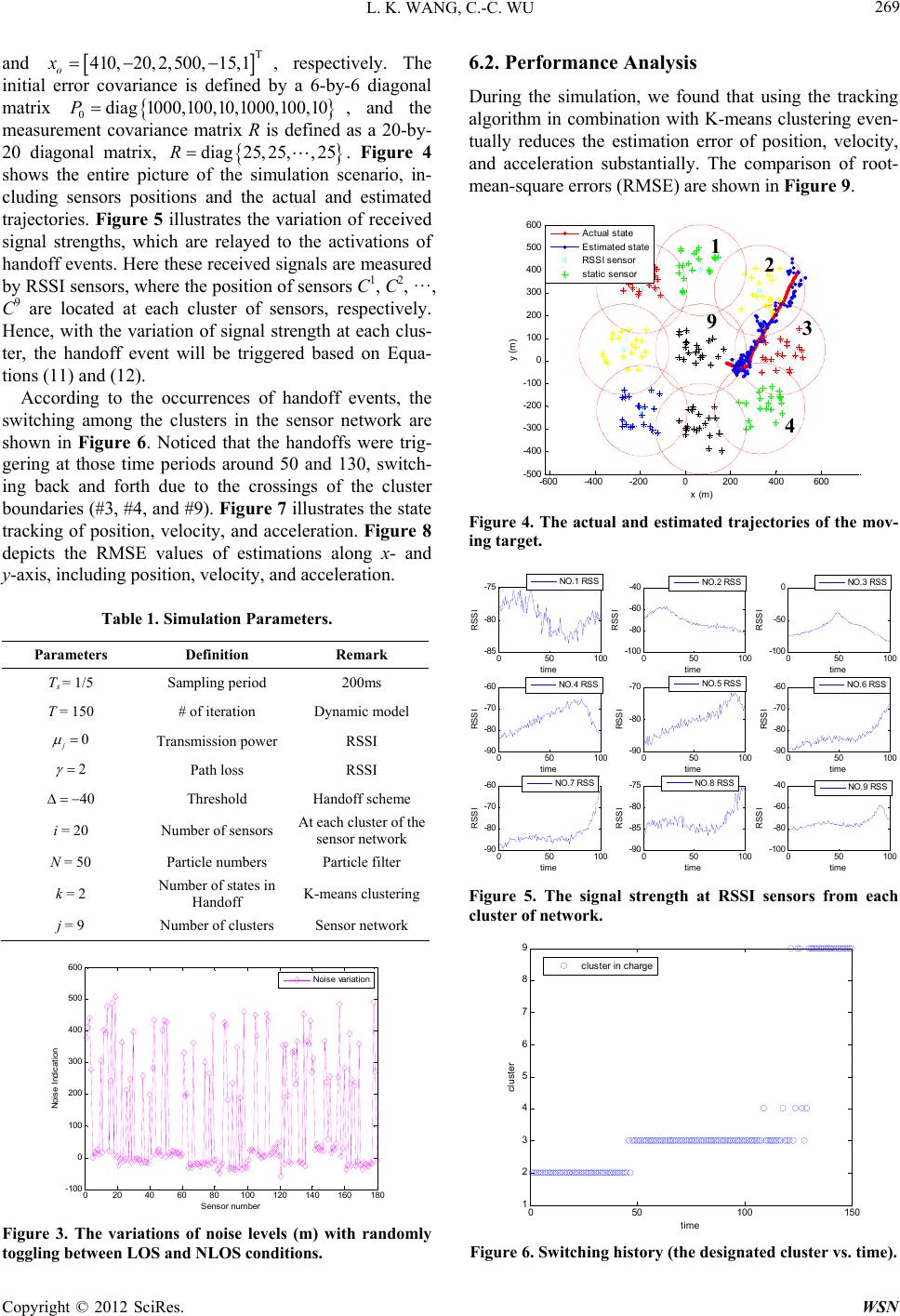 L. K. WANG, C.-C. WU 269 and T 410,20,2,500, 15,1 o x , respectively. The initial error covariance is defined by a 6-by-6 diagonal matrix ,100,10 0diag 1000,100,10,1000P easurem , and the ment covariance matrix R is defined as a 20-by- 20 diagonal matrix, 5,, 25 riation gnals ar sings of diag25, 2 s the entire picture of the sim ies. Figure 5 illustrates the va hese received si due to the cros R showulation scenario, in- cluding sensors positions and the actual and estimated trajector of received signal strengths, which are relayed to the activations of handoff events. Here te measured by RSSI sensors, where the position of sensors C1, C2, ···, C9 are located at each cluster of sensors, respectively. Hence, with the variation of signal strength at each clus- ter, the handoff event will be triggered based on Equa- tions (11) and (12). According to the occurrences of handoff events, the switching among the clusters in the sensor network are shown in Figure 6. Noticed that the handoffs were trig- gering at those time periods around 50 and 130, switch- ing back and forth . Figure 4 the cluster boundaries (#3, #4, and #9). Figure 7 illustrates the state tracking of position, velocity, and acceleration. Figure 8 depicts the RMSE values of estimations along x- and y-axis, including position, velocity, and acceleration. Table 1. Simulation Parameters. Parameters Definition Remark Ts = 1/5 Sampling period 200ms T = 150 # of iteration 0 j Dynamic model RSSI Transmission power 2 Path loss RSSI 40 Threshold Hand At sensor Part K-me off scheme e k ter ans clustering i = 20 Nurs N = 50 k = 2 Nums in j = 9 Number of clusters mber of sensoeach cluster of th networ icle filParticle numbers ber of state Handoff Sensor network 020 40 60 80100 120 140 160180 -100 0 100 200 300 400 500 600 Sensor num ber Noise Indication Noise variation Figure 3. The variations of noise levels (m) with randomly toggling between LOS and NLOS conditions. 6.2. Performance Analysis During the simulation, we found that using the tracking algorithm in combination with K-means clustering even- tually reduces the estimation error of position, velocity, and acceleration substantially. The comparison of root- mean-square errors (RMSE) are shown in Figure 9. 600 -600 -400 -200 0200400 600 -500 -400 -300 -200 -100 0 100 200 300 400 500 x (m) Actual state Estimated state RSSI sensor static sensor y (m) 2 1 igure 4. The actual and estimated trajectories of the mov- ing target. 3 9 4 F 050 100 -85 -80 -75 time RSSI NO.1 RSS 050 100 -100 -80 -60 -40 time RSSI NO.2 RSS 050 100 -100 -50 0 time RSSI NO.3 RSS 050 100 -90 -80 -70 -60 time RSSI NO.4 RSS 050 100 -90 -80 -70 time RSSI NO.5 RSS 050 100 -90 -80 -70 -60 time RSSI NO.6 RSS 050 100 -90 -80 -70 -60 time RSSI NO.7 RSS 050 100 -90 -85 -80 -75 time NO.8 RSS RSSI 050 100 -100 -80 -60 -40 time NO RS S RSSI .9 Figure 5. The signal strength at RSSI sensors from each cluster of ne twork. 050100 150 1 9 2 3 4 5 6 7 c lust er in c harge 8 time cluster witching history (the designated cluster vs. time). Figure 6. S Copyright © 2012 SciRes. WSN 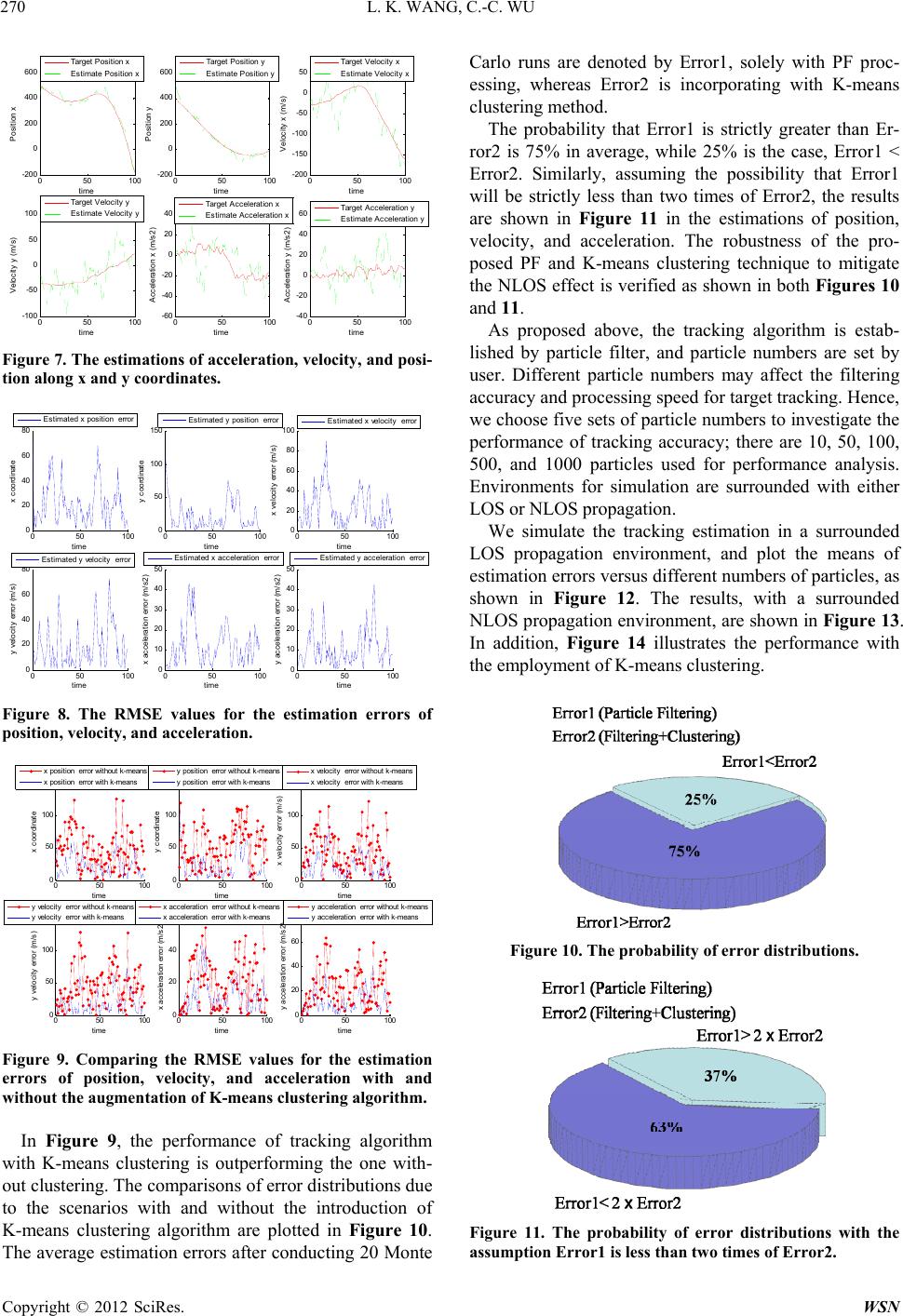 L. K. WANG, C.-C. WU 270 050 100 -200 0 200 400 600 time Posit i on x Target Position x Estimate Position x 050 100 -200 0 200 400 600 time Posit i on y Target Position y Estimate Position y 050 100 -200 -150 -100 -50 0 50 time Velocity x (m/s) Target Velocity x Estimate Velocity x 050 100 -100 -50 0 50 100 time Velocity y (m/s) Target Velocity y Estimate Velocity y 050 100 -60 -40 -20 0 20 40 time Acc el erat i on x (m / s2) Target Accelerat i on x Estimate Acceleration x 050 100 -40 -20 0 20 40 60 time Acc el erat i on y (m / s2) Target Acc e leration y Estimate Acceleration y tion along x and y coordinates. Figure 7. The estimations of acceleration, velocity, and posi- 050 100 0 20 40 60 80 time x coordinat e Es tim at ed x pos it i on error 050 100 0 50 100 150 time y coordinat e Esti m ated y posit i on error 050 100 0 20 40 60 80 100 time x velocity error (m/s) Estimated x velocity error 050 100 0 20 40 60 80 time y velocity error (m/s) Estimated y velocity error 050 100 0 10 20 30 40 50 time x ac cel era tion e rror (m/ s2) Esti m ated x accelerati on error 050 100 0 10 20 30 40 50 time y ac cel era tion e rror (m/ s2) Esti m ated y accelerati on error F position, velo igure 8. The RMSE values for the estimation errors of city, and acceleration. 050 100 0 50 100 150 time x coordinat e x posi ti on err or without k - me ans x posi ti on err or with k-means 050 100 0 50 100 150 time y coordinat e y posi ti on err or without k - m eans y posi ti on err or with k-means 050 100 0 50 100 150 time x velocity error (m/s) x velocity error wi thout k- m eans x velocity error with k-means 050 100 0 50 100 150 time y velocity error (m/s) y velocity error without k-means y velocity error with k-means 050 100 0 20 40 60 time x acc eleration error (m/ s2) x accele ration error without k-means x acceleration error with k-means 050 100 0 20 40 60 80 time y acc eleration error (m/ s2) y accelera tion er ror wi thout k- m ean s y accelera tion er ror wi th k - m eans Figure 9. Comparing the RMSE values for the estimation rrors of position, velocity, and acceleration with and without the augmentation of K-means clustering algorithm. In Figure 9, the performance of tracking algorithm with K-means clustering is outperforming the one with- out clustering. The comparisons of error distributions due to the scenarios with and without the introduction of K-means clustering algorithm are plotted in Figure 10. The average estimation errors after conducting 20 Monte Carlo runs are denoted by Error1, solely with PF proc- essing, whereas Error2 is incorporating with K-means clustering method. The probability that Error1 is strictly greater than Er- ror2 is 75% in average, while 25% is the case, Error1 < Error2. Similarly, assuming the possibility that Error1 will be strictly less than two times of Error2, the results are shown in Figure 11 in the estimations of position, velocity, and acceleration. The robustness of the pro- posed PF and K-means clustering technique to mitigate the NLOS effect is verified as shown in both Figures 10 and 11. As proposed above, the tracking algorithm is estab e - lished by particle filter, and particle numbers are set by user. Different particle numbers may affect the filtering ccuracy and processing speed for target tracking. Hence, a we choose five sets of particle numbers to investigate the performance of tracking accuracy; there are 10, 50, 100, 500, and 1000 particles used for performance analysis. Environments for simulation are surrounded with either LOS or NLOS propagation. We simulate the tracking estimation in a surrounded LOS propagation environment, and plot the means of estimation errors versus different numbers of particles, as shown in Figure 12. The results, with a surrounded NLOS propagation environment, are shown in Figure 13. In addition, Figure 14 illustrates the performance with the employment of K-means clustering. Figure 10. The probability of error distributions. Figure 11. The probability of error distributions with the assumption Error1 is less than two times of Error2. Copyright © 2012 SciRes. WSN 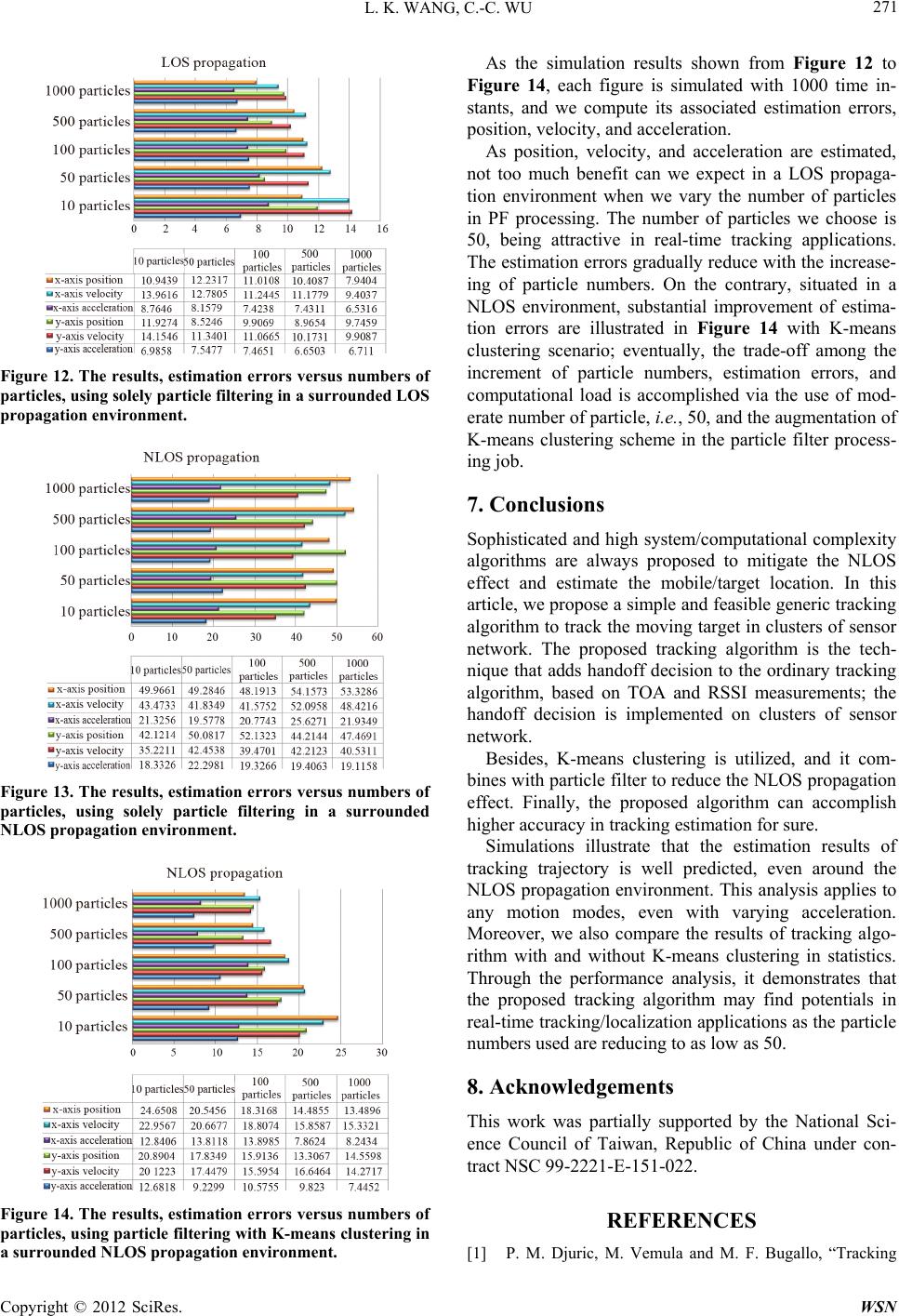 L. K. WANG, C.-C. WU 271 Figure 12. The results, estimation errors versus numbers of particles, using solely par ticle filtering in a surrounded LOS propagation environment. Figure 13. The results, estimation errors versus numbers of particles, using solely particle filtering in a surrounded NLOS propagation environment. Figure 14. The results, estimation errors versus numbers of particles, using particle filtering with K-means clustering in a surrounded NLOS propagation environment. As the simulation results shown from Figure 12 to Figure 14, each figure is simulated with 1000 time in- stants, and we compute its associated estimation errors, position, velocity, and acceleration. As position, velocity, and acceleration are estimated, not too much benefit can we expect in a LOS propaga- tion environment when we vary the number of particles in PF processing. The number of particles we choose is 50, being attractive in real-time tracking applications. The estimation errors gradually reduce with the increase- ing of particle numbers. On the contrary, situated in a NLOS environment, substantial improvement of estima- tion errors are illustrated in Figure 14 with K-means clustering scenario; eventually, the trade-off among the increment of particle numbers, estimation errors, and e particle filter process- g job. 7. Conclusions Sophisticated and high system/computational complexity algorithms are always proposed to mitigate the NLOS effect and estimate the mobile/target location. In this article, we propose a simple and feasible generic tracking algorithm to track the moving target in clusters of sensor network. The proposed tracking algorithm is the tech- nique that adds handoff decision to the ordinary tracking algorithm, based on TOA and RSSI measurements; the handoff decision is implemented on clusters of sensor network. Besides, K-means clustering is utilized, and it com- bines with particle filter to reduce the NLOS propagation effect. Finally, the proposed algorithm can accom [1] P. M. Djuric, M. Vemula and M. F. Bugallo, “Tracking computational load is accomplished via the use of mod- erate number of particle, i.e., 50, and the augmentation of K-means clustering scheme in th in plish higher accuracy in tracking estimation for sure. Simulations illustrate that the estimation results of tracking trajectory is well predicted, even around the NLOS propagation environment. This analysis applies to any motion modes, even with varying acceleration. Moreover, we also compare the results of tracking algo- rithm with and without K-means clustering in statistics. Through the performance analysis, it demonstrates that the proposed tracking algorithm may find potentials in real-time tracking/localization applications as the particle numbers used are reducing to as low as 50. 8. Acknowledgements This work was partially supported by the National Sci- ence Council of Taiwan, Republic of China under con- tract NSC 99-2221-E-151-022. REFERENCES Copyright © 2012 SciRes. WSN  L. K. WANG, C.-C. WU Copyright © 2012 SciRes. WSN 272 s,” IEEE International Conference on Acoustics Signal Processing, 18-23 March 2005, pp. .1109/ICASSP.2005.1416119 with Particle Filtering in Tertiary Wireless Sensor Net- work Speech and ing Linear Programming in Ultrawideband Location- Aware Networks,” IEEE Transactions on Vehicular Technology, Vol. 56, No. 5, 2007, pp. 3182-3198. doi:10.1109/TVT.2007.900397 [10] J. F. Liao and B. S. Chen, “Adaptive Mobile Loca , 757-760. doi:10 ajah and S. Halgamuge, “Mobile Sensor [2] S. Maheswarartion khool and S. Cherkaoui, “Handoff in IEEE g Interacting Mul- ansactions on Wireless Management for Target Tracking,” 2nd International Symposium on Wireless Pervasive Computing, San Juan, 5-7 February 2007, pp. 506-510. doi:10.1109/ISWPC.2007. 342656 [3] J. Wu, H. Xiong, J. Chen and W. Zhou, “A Generaliza- tion of Proximity Functions for K-means,” 7th IEEE In- ternational Conference on Data Mining, Omaha, 28-31 October 2007, pp. 361-370.doi:10.1109/ICDM.2007.59 [4] J. F. Liao and B. S. Chen, “Robust Mobile Location Es- timator with NLOS Mitigation Using Interacting Multiple Estimator with NLOS Mitigation Using Fuzzy Inference Scheme,” 8th International Symposium on Communica- tions, Kaohsiung, Taiwan, 2005. [11] B. S. Gu 802.11p-Based Vehicular Networks,” IFIP International Conference on Wireless and Optical Communications Networks, Cairo, 28-30 April 2009, pp. 1-5. [12] J. F. Liao and B. S. Chen, “Robust Mobile Location Es- timator with NLOS Mitigation Usin tipke Model Algorithm,” IEEE Tr Model Algorithm,” IEEE Transactions on Wireless Com- munications, Vol. 5, No. 11, 2006, pp. 3002-3006. doi:10.1109/TWC.2006.04747 [5] S. S. Moghaddam, V. T. Vakilim and A. Falahati, “New Handoff Initiation Algorithm (Optimum Combin Communications, Vol. 5, No. 11, 2006, pp. 3002-3006. doi:10.1109/TWC.2006.04747 [13] C. C. Tseng, K. H. Chi, M. D. Hsieh and H. H. Chang “Location-Based Fast H , andoff for 802.11 Networks,” IEEE Communications Letters, Vol. 9, No. 4, 2005, pp. 304-306. doi:10.1109/LCOMM.2005.04010 [14] S. Arulampalam, S. Maskell, N. Gordon and T. Clapp, “A Tutorial on Particle Filters for Online Nonlinear Gaussian Bayesian Tracking,” IEEE Transactions on ation of Hysteresis & Threshold Based Methods),” 52nd IEEE VTS-Fall VTC of Vehicular Technology Conference, Vol. 4, 2000, pp. 1567-1574. doi:10.1109/AMS.2009.11 [6] C.-D. Wann, “Kalman Filtering for NLOS Mitigation and Target Tracking in Indoor Wireless Environment,” In: V. Kordic, Ed., Kalman Filter, Intech Publication, 2010, pp. 16-33. [7] L. Yi, S. G. Razul, Z. Lin and C.-M. See, “Target Track- ing in Mixed LOS/NLOS Environments Based on Indi- vidual TOA Measurement Detection,” IEEE Sensor Array and Multichannel Signal Processing Work /Non- Signal Processing, Vol. 50, No. 2, 2002, pp. 174-188. doi:10.1109/78.978374 [15] Z. Yang and X. Wang, “Joint Mobility Tracking and Handoff in Cellular Networks via Sequential Monte Carlo Filtering,” IEEE Transactions on Signal Processing, Vol. 51, No. 1, 2003, pp. 269-281. doi:10.1109/TSP.2002.806580 [16] R. Prakash and V. Veeravalli, “Adaptive Ha shop, Jerusa- 153-156. 06720 lem, 4-7 October 2010, pp. doi:10.1109/SAM.2010.56 rd Handoff Algorithm,” IEEE Journal on Selected Areas in Commu- nications, Vol. 18, 2000, pp. 2456-2464. doi:10.1109/49. 895049 [17] G. Welch and G. Bishop, “An Introduction to the Kalman Filter,” Technical Report, Univer [8] W. Kei and L. Wu, “Mobile Location with NLOS Identi- fication and Mitigation Based on Modified Kalman Fil- tering,” Sensors, Vol. 11, No. 2, 2011, pp. 1641-1656. doi:10.3390/s110201641 [9] S. Venkatesh and R. M. Buehrer, “NLOS Mitigation Us- sity of North Carolina, ty distribution New Caledonia, 2002. Nomenclature Ai, i = 1, 2 State transition matrix bk, k = 1, 2 Binary sequence (LOS or NLOS) i k E, i = 0, 1 Handoff/non-Handoff event NLOSk Measurement error at time instant k p(|) Conditional probabili q() Importance density Xi,k, i = 1, 2 Target state vector at time instant k i k W Weighting associated with ith particle at time instant k |