Applied Mathematics
Vol.05 No.19(2014), Article ID:51462,22 pages
10.4236/am.2014.519300
On the Stability of Stochastic Jump Kinetics
Stefan Engblom
Division of Scientific Computing, Department of Information Technology, Uppsala University, Uppsala, Sweden
Email: stefane@it.uu.se
Copyright © 2014 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 24 September 2014; revised 12 October 2014; accepted 24 October 2014
ABSTRACT
Motivated by the lack of a suitable constructive framework for analyzing popular stochastic models of Systems Biology, we devise conditions for existence and uniqueness of solutions to certain jump stochastic differential equations (SDEs). Working from simple examples we find reasonable and explicit assumptions on the driving coefficients for the SDE representation to make sense. By “reasonable” we mean that stronger assumptions generally do not hold for systems of practical interest. In particular, we argue against the traditional use of global Lipschitz conditions and certain common growth restrictions. By “explicit”, finally, we like to highlight the fact that the various constants occurring among our assumptions all can be determined once the model is fixed. We show how basic long time estimates and some limit results for perturbations can be derived in this setting such that these can be contrasted with the corresponding estimates from deterministic dynamics. The main complication is that the natural path-wise representation is generated by a counting measure with an intensity that depends nonlinearly on the state.
Keywords:
Nonlinear Stability, Perturbation, Continuous-Time Markov Chain, Jump Process, Uncertainty, Rate Equation

1. Introduction
The observation that detailed modeling of biochemical processes inside living cells is a close to hopeless task is a strong argument in favor of stochastic models. Such models are often thought to be more accurate than conventional rate-diffusion laws, yet remain more manageable than, say, descriptions formed at the level of individual molecules. Indeed, several studies [1] -[3] have showed that noisy models have the ability to capture relevant phenomena and to explain actual, observed dynamics.
In this work we shall consider some “flow” properties of a stochastic dynamical system in the form of a quite general continuous-time Markov chain. Since the pioneering work of Gillespie [4] [5] , in the Systems Biology context this type of model is traditionally described in terms of a (chemical) master equation (CME). This is the forward Kolmogorov equation of a certain jump stochastic differential equation (jump SDE for brevity), driven by independent point processes with state-dependent intensities. Despite the popularity of the master equation approach, little analysis on a per trajectory-basis of actual models has been attempted.
In the general literature, when discussing existence/uniqueness and various types of perturbation results, different choices of assumptions with different trade-offs have been made. One finds that the treatment often falls into one of two categories taking either a “mathematical” or a “physical” viewpoint. Both of the conditions are highly general but with subsequently less transparent proofs and resulting in more abstract bounds. Or the conditions are formed out of convenience, say, involving global Lipschitz constants, and classical arguments carry through with only minor modifications.
Protter ( [6] Chap. V) offers a nice discussion from the mathematical point of view and in ascending order of generality, including the arguably highly unrestrictive assumption of locally Lipschitz continuous coefficients. Other authors ( [7] , Chap. 6, [8] , Chap. 3-5) also treat the evolution of general jump-diffusion SDEs in conti- nuous state spaces.
A study of the flow properties of jump SDEs is found in [9] , where the setting is scalar and the state is continuous. In [10] jump stochastic partial differential equations are treated, and existence/uniqueness results as well as ergodic results for the case of a multiplicative noise, are found in [11] [12] . Numerical aspects in a similar setting are discussed in [13] .
In a more applied context, stability is often thought of as implied from physical premises and the solution is tactically assumed to be confined inside some bounded region ( [14] , Chap. V). The fundamental issue here is that for open systems in a stochastic setting, there is a non-zero probability of reaching any finite state and global assumptions must be formed with great care. The analysis of open networks under an a priori assumption of boundedness is therefore quite difficult to interpret other than in a qualitative sense. Notable examples in this setting include time discretization strategies [15] [16] , time-parallel simulation techniques [17] , and parameter perturbations [18] .
Evidently, essentially no systems of interest satisfy global Lipschitz assumptions since the fundamental inte- raction almost always takes the form of a quadratic term. Interestingly, for ordinary differential equations, it has been shown [19] that Lipschitz continuous coefficients imply a computationally polynomial-space complete solution; thus providing a kind of explanation for the convenience with this weak feedback assumption. It is also known [20] , that with SDEs, superlinearly growing coefficients may in fact cause the forward Euler method to diverge.
1.1. Agenda
Besides its expository material, the purpose of this paper is to devise simple conditions that imply stability for finite and, in certain cases, infinite times, and that, when applied to systems of practical interest, yield explicit expressions for the associated stability estimates. As a result the framework developed herein applies in a constructive way to any chemical network, of arbitrary size and topology, formed by any combination of the elementary reactions (2.3) to be presented in Section 2. Additionally, it will be clear how to encompass also other types of nonlinear reactions that typically result from adiabatic simplifications.
As an argument in favor of this bottom-up approach one can note that, for evolutionary reasons, biochemical systems tend to operate close to critical points in phase-space where the efficiency is the highest. Clearly, for such dynamical systems, an analysis by analogy might be highly misleading.
We also like to argue that our results are of interest from the modeling point of view. Due to the type of phenomenological arguments often involved, judging the relative effect of the (non-probabilistic) epistemic uncer- tainty is a fundamental issue which has so far not rendered a consistent analysis.
1.2. Outline
The expository material in Section 2 is devoted to formulating the type of processes we are interested in. We state the master equation as well as the corresponding jump SDE and we also look at some simple, yet informative actual examples. Since it is expected that the properties of the stochastic dynamics are somehow similar to those of the deterministic version, we search for a set of minimal assumptions in the latter setting in Section 3. Techniques for finding explicit values of the constants occurring among our assumptions are also devised. The main results of the paper are found in Section 4 where we put our theory together and prove existence and uniqueness, as well as long time estimates and limit results for perturbations. A concluding discussion is found in Section 5.
2. Stochastic Jump Kinetics
In this section we start with the physicist’s traditional viewpoint of pure jump processes and write down the governing master equations. These are evolution equations for the probability densities of continuous-time Markov chains over a discrete state space. Although the application considered here is mesoscopic chemical kinetics, identical or very similar stochastic models are also used in Epidemiology [21] , Genetics [22] and Sociodynamics [23] , to name just a few.
We then proceed with discussing a path-wise representation in terms of a stochastic jump differential equation. The reason the sample path representation is interesting is the possibility to reason about flow properties and thus compare functionals of single trajectories. This is generally not possible with the master equation approach.
For later use we conclude the section by looking at some prototypical models. A simple analysis shows, somewhat surprisingly, that an innocent-looking example produces second moments that grow indefinitely.
2.1. Reaction Networks and the Master Equation
We consider a chemical network consisting of D different chemical species interacting according to R prescribed reaction pathways. At any given time t, the state of the system is an integer vector  counting the number of individual molecules of each species. A reaction law is a prescribed change of state with an intensity defined by a reaction propensity,
counting the number of individual molecules of each species. A reaction law is a prescribed change of state with an intensity defined by a reaction propensity, . This is the transition probability per unit of time for moving from the state
. This is the transition probability per unit of time for moving from the state  to
to :
:
 (2.1)
(2.1)
where  is the transition step and is the rth column in the stoichiometric matrix
is the transition step and is the rth column in the stoichiometric matrix . Informally, for states
. Informally, for states , we can picture (2.1) as a stochastic version of the time-homogeneous ordinary differential equation
, we can picture (2.1) as a stochastic version of the time-homogeneous ordinary differential equation
 (2.2)
(2.2)
where  is the column vector of reaction propensities.
is the column vector of reaction propensities.
The physical premises leading to a description in the form of discrete transition laws (2.1) often imply the existence of a system size  (e.g. physical volume or total number of individuals). For instance, in a given volume
(e.g. physical volume or total number of individuals). For instance, in a given volume  the elementary chemical reactions can be written using the state vector
the elementary chemical reactions can be written using the state vector ,
,
 (2.3)
(2.3)
with the names of the species in capitals. These propensities are generally scaled such that  for some dimensionless function
for some dimensionless function . Intensities of this form are called density dependent and arise naturally in a number of situations ( [24] , Chap. 11). For the rest of this paper, we conveniently take
. Intensities of this form are called density dependent and arise naturally in a number of situations ( [24] , Chap. 11). For the rest of this paper, we conveniently take  and defer system’s size analysis to another occasion.
and defer system’s size analysis to another occasion.
The models we consider here all have states in the positive integer lattice and the assumption that no transition can yield a state outside  is therefore natural. We make this formal as follows ( [25] , Chap. 8.2.2, Definition 2.4):
is therefore natural. We make this formal as follows ( [25] , Chap. 8.2.2, Definition 2.4):
Assumption 2.1 (Conservation and stability). For all propensities,  for any
for any  such that
such that , and we also restrict initial data to
, and we also restrict initial data to . Furthermore,
. Furthermore,  such that
such that  is finite for all finite arguments
is finite for all finite arguments .
.
To state the chemical master equation (CME), let for brevity  be the probability that a certain number
be the probability that a certain number  of molecules is present at time
of molecules is present at time  conditioned upon an initial state
conditioned upon an initial state . The CME is then given by ( [14] , Chap. V)
. The CME is then given by ( [14] , Chap. V)
 (2.4)
(2.4)
The convention of the transpose of the operator to the right of (2.4) is the standard mathematical formulation of Kolmogorov’s forward differential system ( [25] , Chap. 8.3) in terms of which  is the infinitesimal generator of the associated Markov process. This is also the adjoint of the master operator
is the infinitesimal generator of the associated Markov process. This is also the adjoint of the master operator  in the sense that
in the sense that  in the Euclidean inner product over the state space. An explicit representation is
in the Euclidean inner product over the state space. An explicit representation is
 (2.5)
(2.5)
such that the propensities in (2.1) can be retrieved,
 (2.6)
(2.6)
Under assumptions to be prescribed in Section 4.1 it holds that the dynamics of the expected value of some time-independent unknown function , conditioned upon the initial state
, conditioned upon the initial state , can be written
, can be written
 (2.7)
(2.7)
We now consider a path-wise representation for the stochastic process .
.
2.2. The Sample Path Representation
In the present context of analyzing models in stochastic chemical kinetics, the path-wise jump SDE representation seems to have been first put to use in [26] , and it was later further detailed in [16] . It should be noted, however, that an equivalent representation was used much earlier by Kurtz (see the monograph [24] ).
We thus assume the existence of a probability space  with the filtration
with the filtration  containing
containing  - dimensional Poisson processes. The state of the system
- dimensional Poisson processes. The state of the system  will be constructed from a stochastic integral with respect to suitably chosen Poisson random measures.
will be constructed from a stochastic integral with respect to suitably chosen Poisson random measures.
The transition probability (2.1) defines a counting process  counting at time
counting at time  the number of reactions of type
the number of reactions of type  that has occurred since
that has occurred since . It follows that these processes fully determine the state
. It follows that these processes fully determine the state ,
,
 (2.8)
(2.8)
The counting processes are obtained from the transition intensities (cf. (2.1))
 (2.9)
(2.9)
where by  we mean the value of the process prior to any transitions occurring at time
we mean the value of the process prior to any transitions occurring at time , and where the little-o notation is understood uniformly with respect to the state variable. Alternatively, using Kurtz’s random time change representation ( [24] , Chap. 6.2), we can produce the counting process from a standard unit-rate Poisson process
, and where the little-o notation is understood uniformly with respect to the state variable. Alternatively, using Kurtz’s random time change representation ( [24] , Chap. 6.2), we can produce the counting process from a standard unit-rate Poisson process ,
,
 (2.10)
(2.10)
The marked counting measure ( [27] , Chap. VIII)  with
with  defines an increasing sequence of arrival times
defines an increasing sequence of arrival times  with corresponding “marks”
with corresponding “marks”  according to some probability distribution which we will take to be uniform. The intensity
according to some probability distribution which we will take to be uniform. The intensity  of
of  is the Lebesgue measure scaled by the corresponding propensity,
is the Lebesgue measure scaled by the corresponding propensity, . Using this formalism, (2.8) and (2.10) can be written in the jump SDE form
. Using this formalism, (2.8) and (2.10) can be written in the jump SDE form
 (2.11)
(2.11)
where . Here, the time
. Here, the time  to the arrival of the next reaction of type
to the arrival of the next reaction of type  is exponentially distributed with intensity
is exponentially distributed with intensity . Note that, by virtue of the nature of the propensities, the intensities of the counting processes therefore depend nonlinearly on the state ( [27] , Chap. II.3).
. Note that, by virtue of the nature of the propensities, the intensities of the counting processes therefore depend nonlinearly on the state ( [27] , Chap. II.3).
Using that the point processes are independent and therefore have no common jump times ( [25] , Chap. 8.1.3), we can obtain a sometimes more transparent notation in terms of a scalar counting measure. Define for this purpose and for any state  the cumulative intensities
the cumulative intensities
 (2.12)
(2.12)
such that the total intensity is given by . Let the marks
. Let the marks  be uniformly distributed on
be uniformly distributed on . Then the frequency of each reaction can be controlled through a set of indicator functions
. Then the frequency of each reaction can be controlled through a set of indicator functions  defined according to
defined according to
 (2.13)
(2.13)
Put  and define also for later use the indicator form
and define also for later use the indicator form
 (2.14)
(2.14)
such that
 (2.15)
(2.15)
where  is defined in (2.2).
is defined in (2.2).
The jump SDE (2.11) can now be written in terms of a scalar counting random measure  through a state- dependent thinning procedure ( [28] , Chap. 7.5),
through a state- dependent thinning procedure ( [28] , Chap. 7.5),
 (2.16)
(2.16)
Equation (2.16) expresses exponentially distributed reaction times that arrive according to a point process of intensity  carrying a mark which is uniformly distributed in
carrying a mark which is uniformly distributed in . This mark implies the ignition of one of the reaction channels according to the acceptance-rejection rule (2.13).
. This mark implies the ignition of one of the reaction channels according to the acceptance-rejection rule (2.13).
One frequently decomposes (2.16) into its “drift” and “jump” parts,
 (2.17)
(2.17)
The second term in (2.17) is driven by the compensated measure  and is a local martingale provided in essence that the path is absolutely integrable (see [27] , Chap. VIII.1, Corollary C4 for details).
and is a local martingale provided in essence that the path is absolutely integrable (see [27] , Chap. VIII.1, Corollary C4 for details).
2.2.1. Localization: Itô’s and Dynkin’s Formulas
In analytic work it is often necessary to “tame” the process by deriving results under a stopping time  in some norm. Results for the stopped process
in some norm. Results for the stopped process  can then be transferred to the original process by letting
can then be transferred to the original process by letting  under suitable conditions.
under suitable conditions.
Although there are many general versions of Itô’s change of variables formula available in the setting of semi- martingales (see for example [8] , Chap. 2.7 and [6] , Chap. II.7), we shall get around with the following simple version ( [7] , Chap. 4.4.2). By the properties of the semi-martingale pure jump process we have for 
 (2.18)
(2.18)
where the sum is over jump times . Using that
. Using that  we can write this in differential form as
we can write this in differential form as
 (2.19)
(2.19)
Alternatively, decomposing (2.18) into drift- and jump parts and taking expectation values we get, since the compensated measure is a local martingale,
 (18)
(18)
This is Dynkin’s formula ( [25] , Chap. 9.2.2) for the stopped process and we note that (2.7) is just a differential version.
2.2.2. Coupled Processes
When considering stability properties we will need to compare different trajectories with respect to the same noise. The details of this coupling are not defined in either (2.11) or (2.16) and must in fact be chosen explicitly. Since this equality is easy to inspect for a unit-rate Poisson process, the viewpoint of local time expressed in (2.10) provides an answer; two processes  and
and  may be regarded as coupled if and only if they are evolved using identical Poisson processes
may be regarded as coupled if and only if they are evolved using identical Poisson processes ,
,  in (2.8) and (2.10). This approach was first used by Kurtz [29] in the context of the random time change representation. Algorithmically it implies the Common Reaction Path (CRP) method for simulating coupled processes [30] (see also [17] ).
in (2.8) and (2.10). This approach was first used by Kurtz [29] in the context of the random time change representation. Algorithmically it implies the Common Reaction Path (CRP) method for simulating coupled processes [30] (see also [17] ).
A refinement of this construction was devised, also by Kurtz, in ( [31] , see Equations (2.2), (2.3)). In turn, this approach implies the Coupled Finite Difference method [18] (but see also [16] [26] ), and is more amenable to analysis. This is also the construction formalized below under our current framework.
To obtain such a coupled version of (2.16) we will have to make the thinning dependent on both trajectories. This is achieved by firstly replacing the cumulative intensities in (2.12) with the base (or minimal) intensities
 (2.21)
(2.21)
and use the new total base intensity  as the intensity of the counting measure
as the intensity of the counting measure ;
; . We also modify (2.13) accordingly,
. We also modify (2.13) accordingly,
 (2.22)
(2.22)
Secondly, we also define the remainder intensity,
 (2.23)
(2.23)
In analogy with the previous construction we have the associated total intensity  and counting measure
and counting measure ;
; . This time the thinning procedure is non-symmetric in its two first arguments,
. This time the thinning procedure is non-symmetric in its two first arguments,
 (2.24)
(2.24)
with the non-symmetricity due to
 (2.25)
(2.25)
As a concrete example of how this comparative thinning might be used, consider the following variant of (2.19),
 (2.26)
(2.26)
For this specific example, the terms governed by the base counting measure  cancel out altogether.
cancel out altogether.
We mention also that an equivalent construction, but one that leads to different algorithms, can be obtained via a thinning of a single measure [16] [26] . Defining instead
 (2.27)
(2.27)
implying the total intensity  and associated counting measure
and associated counting measure ;
;  . By construction the indicator functions are now non-symmetric in their first two arguments,
. By construction the indicator functions are now non-symmetric in their first two arguments,
 (2.28)
(2.28)
In analogy to (2.26) we get
 (2.29)
(2.29)
This time, however, the intensity of the counting measure is generally larger and the equivalence is obtained as a result of the thinning procedure.
2.2.3. The Validity of the Master Equation
With this much formalism developed, we may conveniently quote the following result:
Theorem 2.1 ( [25] , Chap. 8.3.2, Theorem 3.3). Under Assumption 2.1, and if additionally, for  it holds that
it holds that
 (2.30)
(2.30)
then (2.7) is valid for .
.
Since the governing Equation (2.7) for the expected value of  is a direct consequence of (2.4), we can similarly conclude the following:
is a direct consequence of (2.4), we can similarly conclude the following:
Corollary 2.2 Under the assumptions of Theorem 2.1, and if, moreover, in an arbitrary norm ,
,
 (2.31)
(2.31)
then (2.7) is valid for .
.
In stating these results we have suppressed the conditional dependency on the initial state which we for simplicity consider to be some non-random state .
.
2.3. Concrete Examples
Consider the bi-molecular birth-death system,
 (2.32)
(2.32)
that is, the system is in contact with a large reservoir such that  - and
- and  -molecules are emitted at a constant rate
-molecules are emitted at a constant rate . Additionally, a decay reaction happens with probability
. Additionally, a decay reaction happens with probability  per unit of time whenever two molecules meet. For this example we have the stoichiometric matrix
per unit of time whenever two molecules meet. For this example we have the stoichiometric matrix

and the vector propensity function

where .
.
For a state , define
, define . Itô’s formula (2.19) with
. Itô’s formula (2.19) with  yields
yields
 (2.33)
(2.33)
which upon a moments consideration is just the same thing as the model
 (2.34)
(2.34)
that is, a constant intensity discrete random walk process. An explicit solution is the difference between two independent Poisson distributions,
 (2.35)
(2.35)
where  is a normally distributed random variable of the indicated mean and variance. Hence
is a normally distributed random variable of the indicated mean and variance. Hence  fluctuates between arbitrarily large and small values as
fluctuates between arbitrarily large and small values as .
.
Reversible Versions
From time to time below we shall be concerned with the following closed version of (2.32), consisting of a single reversible reaction,
 (2.36a)
(2.36a)
This is clearly a finite system since the number  is always preserved. An open version of the same system is
is always preserved. An open version of the same system is
 (2.36b)
(2.36b)
and will prove to be a useful example in the stochastic setting since formally, all states in  are reachable. For (2.36a) we have
are reachable. For (2.36a) we have
 (2.37)
(2.37)
while (2.36b) is represented by
 (2.38)
(2.38)
These examples, while very simple to deal with, will provide good counterexamples in both Sections 3 and 4.
3. Deterministic Stability
In this section we shall be concerned with the deterministic drift part of the dynamics (2.17). We are interested in techniques for judging the stability of the time-homogeneous ODE (2.2), the so-called reaction rate equations implied by the rates (2.1). Stability and continuity with respect to initial data are considered in Sections 3.1 and 3.2. The main motivation for this discussion stems from the observation that assumptions that do not hold in this very basic setting are unlikely to hold in the stochastic case. In Section 3.3, techniques for explicitly obtaining all our postulated constants are discussed. A good point in favor of taking the time to describe these techniques is that we have not found such a discussion elsewhere.
Initially we will consider states , but we will soon find it convenient to restrict the treatment to
, but we will soon find it convenient to restrict the treatment to . In order to remain valid also in the discrete stochastic setting, however, constructed counterexamples will remain relevant also when restricted to
. In order to remain valid also in the discrete stochastic setting, however, constructed counterexamples will remain relevant also when restricted to .
.
3.1. Stability
Many stability proofs can be thought of as comparisons with relevant linear cases. This is the motivation for the well-known Grönwall’s inequality which we state in the following two versions.
Lemma 3.1. Suppose that  for
for . Then
. Then
 (3.1)
(3.1)
The same conclusion holds irrespective of the differentiability of  but with
but with  and under the weaker integral condition
and under the weaker integral condition
 (3.2)
(3.2)
The most immediate way of comparing the growth of solutions to the ODE (2.2) to those of a linear ODE is to require that the norm of the driving function is bounded in terms of its argument;
 (3.3)
(3.3)
since then by the triangle inequality,
 (3.4)
(3.4)
where Grönwall’s inequality applies. Unfortunately, (3.3) is a too strict requirement for our applications.
Proposition 3.2 The bi-molecular birth-death system (2.32) does not satisfy (3.3).
Proof. We compute  for a state
for a state . Hence for a = b = N = 0, 1,··· we have for
. Hence for a = b = N = 0, 1,··· we have for  large enough that
large enough that , which can clearly never be bounded linearly in
, which can clearly never be bounded linearly in .
. 
The problem with the simple condition (3.3) is that it does not take the direction of growth into account; the offending quadratic propensity in (2.32) actually decreases the number of molecules. To deal with this, let  be an arbitrary vector defining an “outward” direction. The length of the component of the driving function along this direction is
be an arbitrary vector defining an “outward” direction. The length of the component of the driving function along this direction is  and in order not to have
and in order not to have  driven too strongly out along this ray we may, in view of Grönwall’s inequality, naturally require that
driven too strongly out along this ray we may, in view of Grönwall’s inequality, naturally require that  for
for  sufficiently large. Equivalently, for any x,
sufficiently large. Equivalently, for any x,
 (3.5)
(3.5)
from which one deduces
 (3.6)
(3.6)
where Grönwall’s inequality applies anew. The assumption (3.5) is weaker than (3.3) since the former implies the latter by the Cauchy-Schwarz inequality. Indeed, as in the proof of Proposition 3.2 it is readily checked that for the bi-molecular birth-death system (2.32), we get  which this time readily can be bounded linearly in terms of
which this time readily can be bounded linearly in terms of .
.
Unfortunately, in the case of an infinite state space and strong dependencies between the species the assumption (3.5) is also often unrealistic.
Proposition 3.3 Neither (2.36a) nor (2.36b) admits a bound of the kind (3.5).
Proof. As in the proof of Proposition 3.2 we look at a ray  parametrized by a non- negative integer
parametrized by a non- negative integer . For (2.36a) we compute
. For (2.36a) we compute , which clearly cannot be bounded linearly in
, which clearly cannot be bounded linearly in . The same argument applies also to (2.36b).
. The same argument applies also to (2.36b). 
This negative result can perhaps best be appreciated as a kind of loss of information about the dependencies between the species in the functional form of the condition (3.5). The number of  - and
- and  -molecules is strongly correlated with the number of
-molecules is strongly correlated with the number of  -molecules such that, in fact, in (2.36a)
-molecules such that, in fact, in (2.36a)  is a preserved quantity. By contrast, in (3.5) the growth of
is a preserved quantity. By contrast, in (3.5) the growth of  is estimated from the sum of the growth of the individual elements of x as if they where independent.
is estimated from the sum of the growth of the individual elements of x as if they where independent.
A way around this limitation can be found provided that we leave the general case . We therefore specify the discussion to the positive quadrant
. We therefore specify the discussion to the positive quadrant  and assume from now on that it can be shown a priori that the initial data
and assume from now on that it can be shown a priori that the initial data  belongs to this set and that the subsequent trajectory
belongs to this set and that the subsequent trajectory  never leaves it (compare Assumption 2.1).
never leaves it (compare Assumption 2.1).
It then follows that , where
, where  is the vector of length
is the vector of length  containing all ones. This vector also defines a suitable “outward” vector for states
containing all ones. This vector also defines a suitable “outward” vector for states  since solutions to the ODE (2.2) cannot grow without simultaneously growing also in the direction of
since solutions to the ODE (2.2) cannot grow without simultaneously growing also in the direction of .
.
Again, in view of Grönwall’s inequality Lemma 3.1, we tentatively require that  for
for  sufficiently large. Equivalently, for any
sufficiently large. Equivalently, for any ,
,
 (3.7)
(3.7)
implying the bounded dynamics
 (3.8)
(3.8)
We remark in passing that the criterion (3.7) is sharp in the sense that if the reversed inequality can be shown to be true, then the growth of solutions can be estimated from below.
Example 3.1 As a point in favor of this approach we compute for the bi-molecular birth-death system (2.32),  which evidently falls under the assumption (3.7) with
which evidently falls under the assumption (3.7) with . For the reversible case (2.36a) we similarly get
. For the reversible case (2.36a) we similarly get  such that (3.7) applies with
such that (3.7) applies with . Finally, and in the same fashion, the open case (2.36b) is seen to be covered by letting
. Finally, and in the same fashion, the open case (2.36b) is seen to be covered by letting .
.
The chosen “outward” vector  is by no means special. Clearly, any strictly positive vector
is by no means special. Clearly, any strictly positive vector  may be used in its place since
may be used in its place since  and
and  are equivalent norms over
are equivalent norms over . This is a general and useful observation as it may be used to discard parts of a system that are closed without any restrictions on the associated propensities.
. This is a general and useful observation as it may be used to discard parts of a system that are closed without any restrictions on the associated propensities.
Example 3.2 For the reversible system (2.36a), we have already noted that  is a conserved quantity such that the choice
is a conserved quantity such that the choice  yields
yields . The open case (2.36b) also benefits from this weighted norm in that we get
. The open case (2.36b) also benefits from this weighted norm in that we get .
.
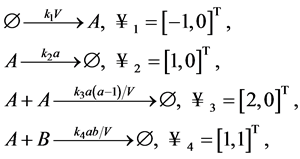
Example 3.3 A slightly more involved model reads as follows:

This example has been constructed such that the quadratic reaction increases  and hence (3.7) does not apply. However, taking
and hence (3.7) does not apply. However, taking  we get
we get

This example hints at a general technique for obtaining suitable candidates for the weight vector . Simply form the matrix
. Simply form the matrix  consisting of the columns of
consisting of the columns of  that are affected by superlinear propensities. If a vector
that are affected by superlinear propensities. If a vector  annihilating these propensities exists, it can be found in the null-space of
annihilating these propensities exists, it can be found in the null-space of , readily available by linear algebra techniques. We omit the details.
, readily available by linear algebra techniques. We omit the details.
3.2. Continuity
For well-posedness of the ODE (2.2) we also need continuity with respect to the initial data. We cannot ask for uniform Lipschitz continuity since  clearly implies (3.3) which we have already refuted. For the same reason, a uniform one-sided Lipschitz condition
clearly implies (3.3) which we have already refuted. For the same reason, a uniform one-sided Lipschitz condition  cannot be assumed to hold since it implies (3.5). The problem here is the global nature of the estimate and it therefore seems to be reasonable to localize this assumption. For instance, one might ask for
cannot be assumed to hold since it implies (3.5). The problem here is the global nature of the estimate and it therefore seems to be reasonable to localize this assumption. For instance, one might ask for
 (3.9)
(3.9)
presumably with some growth restrictions on . Although very general, such an analysis is likely to be less informative when it comes to estimating actual constants in later results. We shall therefore consider the following simpler version,
. Although very general, such an analysis is likely to be less informative when it comes to estimating actual constants in later results. We shall therefore consider the following simpler version,
 (3.10)
(3.10)
where the form of  has been restricted to better suit the present purposes. Trivially, the norms
has been restricted to better suit the present purposes. Trivially, the norms  and
and  are equivalent and hence the specific choice made in (3.10) is just a matter of convenience. Since the idea here is to use a priori bounds on
are equivalent and hence the specific choice made in (3.10) is just a matter of convenience. Since the idea here is to use a priori bounds on  and
and  when deriving perturbation bounds, using
when deriving perturbation bounds, using  (or
(or ) is natural.
) is natural.
Theorem 3.4 Suppose that the ODE (2.2) satisfies (3.7) and (3.10) and that initial data  implies a solution
implies a solution . Then for any
. Then for any  there is a unique such solution
there is a unique such solution . Moreover, define
. Moreover, define , where
, where  and
and  are two trajectories associated with initial data
are two trajectories associated with initial data , respectively. Then
, respectively. Then
 (3.11)
(3.11)
Proof. Combining (3.7) with Grönwall’s inequality we get the a priori estimate

Hence the (bounded) solution to

is readily found through its integrating factor. The order estimate is a consequence of the fact that

since the trajectory is continuous. 
3.3. Bounds for Elementary Reactions
As briefly discussed by the end of Section 3.1, finding bounds on A and  in (3.7) as well as a suitable weight-vector
in (3.7) as well as a suitable weight-vector  amounts to basic inequalities and some fairly straightforward linear algebra manipulations. In this section we therefore consider precise bounds in (3.10) for the elementary propensities (2.3). Since (3.10) is linear in
amounts to basic inequalities and some fairly straightforward linear algebra manipulations. In this section we therefore consider precise bounds in (3.10) for the elementary propensities (2.3). Since (3.10) is linear in , a reasonable approach is to consider linear and quadratic propensities separate (constant propensities trivially satisfy (3.10) with
, a reasonable approach is to consider linear and quadratic propensities separate (constant propensities trivially satisfy (3.10) with ).
).
Proposition 3.5 (linear case) Write a set of  linear propensities as
linear propensities as ,
,  , each with the corresponding stoichiometric vector
, each with the corresponding stoichiometric vector . Then
. Then  satisfies
satisfies
 with
with  in terms of the Euclidean logarithmic norm
in terms of the Euclidean logarithmic norm 
and the matrix  containing the vectors
containing the vectors  as columns. In particular, in the case of a single linear propensity and, if as is usually the case,
as columns. In particular, in the case of a single linear propensity and, if as is usually the case,  is all-zero except for a single rate constant
is all-zero except for a single rate constant  in the nth position, then this reduces to
in the nth position, then this reduces to .
.
Proof. The first assertion is immediate since the smallest such constant  by definition is the logarithmic norm (see e.g. [32] ). To compute
by definition is the logarithmic norm (see e.g. [32] ). To compute  when
when  has the form indicated, we determine the extremal eigenvalue of
has the form indicated, we determine the extremal eigenvalue of . By the (signed) scaling invariance of the logarithmic norm we may without loss of generality take
. By the (signed) scaling invariance of the logarithmic norm we may without loss of generality take . The spectral relation for an eigenpair
. The spectral relation for an eigenpair  can be written as
can be written as


For non-zero  the first relation can be solved for
the first relation can be solved for . When inserted into the second relation, using that
. When inserted into the second relation, using that  (or otherwise
(or otherwise ), we get a quadratic equation for
), we get a quadratic equation for  with a single extremal root.
with a single extremal root. 
Example 3.4 The simple special case in Proposition 3.5 is generally sharp except for when there are linear reactions affecting all species considered in the model. For example, in a one-dimensional state space, the single decay  with propensity
with propensity  allows the optimal value
allows the optimal value . In general
. In general  -dimensional space, a chain with unit rate constants of the form
-dimensional space, a chain with unit rate constants of the form , or a closed loop in which the last transition is replaced with
, or a closed loop in which the last transition is replaced with , both admit bounds
, both admit bounds  as an inspection of the Gershgorin-discs of
as an inspection of the Gershgorin-discs of  shows.
shows.
Other than for those special examples, for the most important linear cases, Table 1 summarizes the bounds as obtained from the special case in Proposition 3.5 (with all reaction constants normalized to unity).
Proposition 3.6 (quadratic case). Write a general quadratic propensity as  with
with  a symmetric matrix. Then
a symmetric matrix. Then  satisfies (3.10) with
satisfies (3.10) with  and
and
 . For the special case that
. For the special case that  there holds
there holds .
.
Proof. Since  is symmetric we have
is symmetric we have . Hence an explicit expression for
. Hence an explicit expression for  is obtained as follows:
is obtained as follows:

The indicated upper bound is derived from the fact that  [32] . For the useful special case, define first the vector
[32] . For the useful special case, define first the vector  in terms of
in terms of , and
, and . Using the fact that the logarithmic norm is sub-additive we can reuse the calculation in the proof of Proposition 3.5,
. Using the fact that the logarithmic norm is sub-additive we can reuse the calculation in the proof of Proposition 3.5,

Example 3.5 The most important quadratic cases are summarized in Table 2. For the dimerizations in the lower half of the table there is also a linear part  in (3.10).
in (3.10).
Example 3.6 The bi-molecular birth-death model (2.32) admits the constants  in (3.10). Similarly, the reversible cases (2.36a) and (2.36b) both obeys (3.10) with
in (3.10). Similarly, the reversible cases (2.36a) and (2.36b) both obeys (3.10) with
 . All these results are sharp except for the open case (2.36b) for which one can
. All these results are sharp except for the open case (2.36b) for which one can
obtain a slightly smaller constant  by using the general formula stated in Proposition 3.5.
by using the general formula stated in Proposition 3.5.
Example 3.7 As a highly prototypical example we consider the following natural extension of the bi- molecular birth-death model (2.32),

where in this example it is informative to consider the dependence on the system’s size . It is straightforward to show the bounds
. It is straightforward to show the bounds  in (3.7) and hence that the system is effectively bounded despite being of open character. This is seen from the fact that, for states
in (3.7) and hence that the system is effectively bounded despite being of open character. This is seen from the fact that, for states , the dynamics is dissipative in the
, the dynamics is dissipative in the  -norm. Furthermore, from Proposition 3.5 and 3.6 we get the sharp bounds
-norm. Furthermore, from Proposition 3.5 and 3.6 we get the sharp bounds  in (3.10). It follows that for states
in (3.10). It follows that for states  such that
such that , the dynamics is contractive in the Euclidean norm. For density dependent propensities we expect that
, the dynamics is contractive in the Euclidean norm. For density dependent propensities we expect that  in any norm as
in any norm as  grows, and hence the region of contractivity grows in a relative sense. Intuitively one expects that these results offer an insight into the evolution of the process that is relevant also in the stochastic setting.
grows, and hence the region of contractivity grows in a relative sense. Intuitively one expects that these results offer an insight into the evolution of the process that is relevant also in the stochastic setting.
4. Stochastic Stability
We now consider the properties of the stochastic jump SDE (2.16). For convenience we start by collecting all assumptions in Section 4.1. In the stochastic setting the requirements for existence and uniqueness are slightly stronger than in the deterministic case such that the one-sided bound (3.10) needs to be augmented with an

Table 1. Linear propensities and bounds of M in (3.10).
Table 2. Quadratic propensities and bounds of M, μ in (3.10).
unsigned version, implying essentially the assumption of at most quadratically growing propensities. We demonstrate that this assumption is reasonable by constructing a model involving cubic propensities and with unbounded second moments. On the positive side we show in Section 4.2 that the assumptions are strong enough to guarantee finite moments of any order during finite time intervals.
We prove existence and uniqueness of solutions to the jump SDE (2.16) in Section 4.3. A sufficient condition for the existence of asymptotic bounds of the pth order moment is given in Section 4.4 where we also derive some stability estimates.
4.1. Working Assumptions
We state formally the set of assumptions on the jump SDE (14) as follows.
Assumption 4.9 For arguments ,
,  ,
,  , and weighted norm
, and weighted norm  we assume that
we assume that
(1)  (“bounded growth”),
(“bounded growth”),
(2)  (“absolutely bounded growth”),
(“absolutely bounded growth”),
(3) ,
,
(4) .
.
The parameters  are assumed to be positive (with
are assumed to be positive (with  possibly zero) but we allow also negative values of
possibly zero) but we allow also negative values of . The vector
. The vector  is normalized such that
is normalized such that ; hence the bound
; hence the bound  is sharp.
is sharp.
After the original draft of the current paper was finished, the author became aware of two other papers discussing very similar conditions [33] [34] . In particular, Assumption 4.1 (1), (2) are also found in ( [33] , Condition (1). In fact, these very conditions can be shown to be exactly what is needed to apply the earlier and quite general theory found in ( [35] , Theorem 7.1).
In Assumption 4.9 (2) the case  will merit special attention. For well-posedness it turns out that we will need to require a higher regularity of the initial data when
will merit special attention. For well-posedness it turns out that we will need to require a higher regularity of the initial data when  (see Theorem 4.7) and the condition for ergodicity becomes more restrictive (see Theorem 4.9). In practice,
(see Theorem 4.7) and the condition for ergodicity becomes more restrictive (see Theorem 4.9). In practice,  implies that opposing quadratic reactions of the type
implies that opposing quadratic reactions of the type
 (4.1)
(4.1)
are impossible. Similarly, when  reactions of the type
reactions of the type
 (4.2)
(4.2)
are excluded.
Note that (2) and (4) are redundant in the sense that they are both implied by (3). However, as we saw in Section 3.3, in (4) it is often possible to find sharper constants  and
and  by considering this bound in isolation. Also, although (3) is stronger than (4), it is in particular valid for quadratic propensities as can be seen from the representation used in the proof of Proposition 3.6,
by considering this bound in isolation. Also, although (3) is stronger than (4), it is in particular valid for quadratic propensities as can be seen from the representation used in the proof of Proposition 3.6,
 (4.3)
(4.3)
The Danger with Cubic Propensities
Assumption 4.1 (2) specifies the discussion to propensities with at most quadratic growth, at least when measured in the direction of the weight vector . To show that this is natural we now demonstrate that additional care should be taken when considering cubic propensities.
. To show that this is natural we now demonstrate that additional care should be taken when considering cubic propensities.
Example 4.2 Consider the model

such that the stoichiometric vector is given by , and hence that the drift
, and hence that the drift .
.
Proposition 4.1 For the model in Example 4.2, if , then the second moment explodes in finite time.
, then the second moment explodes in finite time.
Proof. Assume that both the second and the third moment are bounded for  with
with . From (2.7) we get the governing equation
. From (2.7) we get the governing equation

such that the growth of the second moment remains bounded only provided that the third moment remains finite. It is convenient to look at the cumulative third order moment. From (2.7),

By the arithmetic-geometric mean inequality,  , such that by Jensen’s inequality,
, such that by Jensen’s inequality,

We put  and get the differential inequality
and get the differential inequality

which can be integrated and rearranged to produce the bound
 (4.4)
(4.4)
Hence the third, and consequently also the second moment explode for some finite  whenever
whenever .
. 
Interestingly, we note that if , then the probability that the cubic decay transition occurs first is
, then the probability that the cubic decay transition occurs first is , and if this happens the state of the system will be stuck with a single molecule indefinitely.
, and if this happens the state of the system will be stuck with a single molecule indefinitely.
4.2. Moment Bounds
In this section we consider general moment bounds derived from (2.20) using localization. To get some guidance, let us first assume that the differential form of Dynkin’s formula (2.7) is valid. Since any trajectory  by the basic Assumption 2.1 will belong to
by the basic Assumption 2.1 will belong to , we may use that
, we may use that . Hence from (2.7) with
. Hence from (2.7) with  we get that
we get that
 (4.5)
(4.5)
by Assumption 4.1 (1). Clearly, the differential form of Grönwall’s inequality in Lemma 3.1 applies here. A correct version of this argument unfortunately looses the sign of .
.
Proposition 4.2 If Assumption 4.1 (1) is true, then

where .
.
Here and below we shall make use of the stopping time  and define
and define .
.
Proof. From (2.20) with  we get that
we get that
 (4.6)
(4.6)
By the integral form of Grönwall’s inequality in Lemma 3.1 we deduce in terms of  that
that
 (4.7)
(4.7)
such that the same bound holds for  by letting
by letting .
. 
We attempt a similar treatment for obtaining bounds in mean square. Assuming tactically that (2.7) is valid, writing  we get after some work that
we get after some work that
 (4.8)
(4.8)
where  We expect from Grönwall’s inequality that
We expect from Grönwall’s inequality that  grows at most exponentially with
grows at most exponentially with  whenever
whenever
 (4.9)
(4.9)
However, this tentative condition is often violated in practice since the second term , and since we already know from Proposition 3.3 that this quantity does not admit bounds in terms of
, and since we already know from Proposition 3.3 that this quantity does not admit bounds in terms of  even for very simple problems.
even for very simple problems.
More realistic conditions arise when seeking to bound  instead.
instead.
Proposition 4.3 If for some constants  and
and ,
,
 (4.10)
(4.10)
 understood elementwise), then
understood elementwise), then .
.
The proof of Proposition 4.3 follows the same pattern as for Proposition 4.2, but using this time
 in (2.20). The condition (4.10) is typically more realistic than (4.9) since we recognize the term
in (2.20). The condition (4.10) is typically more realistic than (4.9) since we recognize the term , which under the evidently reasonable Assumption 4.1 (1) is
, which under the evidently reasonable Assumption 4.1 (1) is . It follows that if
. It follows that if  grows at most quadratically with
grows at most quadratically with , then this assumption is sufficient to yield bounds in mean square. Stated formally,
, then this assumption is sufficient to yield bounds in mean square. Stated formally,
Proposition 4.4 Under Assumption 4.1 (1) and (2) the condition (4.10) of Proposition 4.3 is true with  and
and .
.
Proof. This is straightforward: we get by the assumptions and Hölder’s inequality,

where an application of Young’s inequality yields the indicated bounds. 
As a strong point in favor of our running assumptions we now demonstrate that the above reasoning can be generalized: these two conditions implies finite time stability in any order moment. We note that in a recent manuscript [34] , related conditions for the same results are proposed.
Theorem 4.5 (Moment estimate). Under Assumption 4.1 (1) and (2), for any integer ,
,
 (4.11)
(4.11)
where  is a constant depending on the assumptions and on
is a constant depending on the assumptions and on .
.
The proof of Theorem 4.5 and some later results will simplify using the following bound.
Lemma 4.6 Let  with
with  and
and . Then for integer
. Then for integer  we have the bounds
we have the bounds
 (4.12)
(4.12)
 (4.13)
(4.13)
Proof. Both results follow from Taylor expansions;


respectively, where . Using the triangle inequality and the elementary inequality
. Using the triangle inequality and the elementary inequality  the lemma is proved.
the lemma is proved. 
Proof of Theorem 4.5. Using (2.20) with  we get
we get
 (4.14)
(4.14)
Using Lemma 4.6 (4.12) and Assumption 4.1 (1) and (2) we obtain

where . Expanding and using Young’s inequality with exponents
. Expanding and using Young’s inequality with exponents  and conjugate exponents
and conjugate exponents ,
,

for some constant  which thus depends on the assumptions. Applying Grönwall’s inequality and letting
which thus depends on the assumptions. Applying Grönwall’s inequality and letting  we obtain the stated result.
we obtain the stated result.
4.3. Existence and Uniqueness
We shall now prove that the jump SDE (2.16) under Assumption 4.1 has a uniquely defined and locally bounded solution. To this end and following ( [8] , Section 3.1.2), we introduce the following spaces of path-wise locally bounded processes:
 (4.15)
(4.15)
Theorem 4.7 (Existence). Let  be a solution to (2.16) under Assumption 4.1 (1) and (2) with
be a solution to (2.16) under Assumption 4.1 (1) and (2) with .
.
Then if ,
, . If
. If  then the conclusion remains under the additional
then the conclusion remains under the additional
requirement that .
.
Proof. Below we let  denote a positive constant which may be different on each occasion used. As before we use the stopping time
denote a positive constant which may be different on each occasion used. As before we use the stopping time  and put
and put . We get from Itô’s formula (with G defined in (4.14))
. We get from Itô’s formula (with G defined in (4.14))

Since the propensities are bounded for bounded arguments (Assumption 2.1), using the stopping time we find that the jump part is absolutely integrable and hence a local martingale . We estimate its quadratic variation under Assumption 4.1 (2),
. We estimate its quadratic variation under Assumption 4.1 (2),

 (4.16)
(4.16)
 (4.17)
(4.17)
 (4.18)
(4.18)
where . In (4.16) Lemma 4.6 (4.13) was applied and Assumption 4.1 (2) entered in (4.17). Assume
. In (4.16) Lemma 4.6 (4.13) was applied and Assumption 4.1 (2) entered in (4.17). Assume
first that . Then for the drift part we have already constructed a suitable bound in Theorem 4.5 such that
. Then for the drift part we have already constructed a suitable bound in Theorem 4.5 such that

Taking supremum and expectation values we get from Burkholder’s inequality ( [6] , Chap. IV.4) that

Writing  we conclude that
we conclude that

By Grönwall’s inequality we have thus shown that  can be bounded in terms of the initial data and time
can be bounded in terms of the initial data and time . The result now follows by letting
. The result now follows by letting  and using Fatou’s lemma.
and using Fatou’s lemma.
Next assume that . Then we have to rely more directly on Theorem 4.5 in (4.18),
. Then we have to rely more directly on Theorem 4.5 in (4.18),

where, although there is now a dependency on , the rest of the argument carries through.
, the rest of the argument carries through.
For the case that the initial data  is non-deterministic we see that the general quadratic case Assumption 4.1 (2) with
is non-deterministic we see that the general quadratic case Assumption 4.1 (2) with  requires a one order higher moment of the initial data in order for a solution in
requires a one order higher moment of the initial data in order for a solution in  to exist.
to exist.
Theorem 4.8 (Uniqueness) Let Assumption 4.1 (1)-(4) hold true. Then any two paths  and
and  coupled according to the description in Section 2.2.2 with
coupled according to the description in Section 2.2.2 with  are equal.
are equal.
We shall be using the observation that, for , we have that
, we have that  (referred below to as the “integer inequality”).
(referred below to as the “integer inequality”).
Proof. Under the same stopping time as before we get from Itô’s formula using the coupling described in Section 2.2.2 that

From the integer inequality we find that there is a constant  depending on
depending on  such that
such that

Using that  and Grönwall’s inequality we conclude that the only solution is the zero solution. Letting
and Grönwall’s inequality we conclude that the only solution is the zero solution. Letting  and using Fatou’s lemma the statement is therefore proved.
and using Fatou’s lemma the statement is therefore proved. 
In a certain sense the previous result is trivial; from the Poisson representation (2.8) we see that up to the first explosion, a path is uniquely determined from an initial state and a series of Poisson distributed events. However, and as we shall see below, the above proof is prototypical for more involved situations. An example would be when devising hybrid approximations in continuous state space. Indeed, in the above proof, note that if the integer inequality did not hold we would naturally have to rely on the Cauchy-Schwartz inequality instead. With  this leads to bounds of the typical kind
this leads to bounds of the typical kind
 (4.20)
(4.20)
for which  is an admissible solution. This observation shows that the integer inequality as used in the proof is crucial; without it the integral inequality (4.19) admits growing solutions.
is an admissible solution. This observation shows that the integer inequality as used in the proof is crucial; without it the integral inequality (4.19) admits growing solutions.
4.4. Stability
Although Theorem 4.5 shows that any moments are bounded in finite time, a relevant question from the modeling point of view is whether the first few moments remain bounded indefinitely. We give a result to this effect which relies on the existence of solutions in  which implies that the differential form (2.7) of Dynkin’s formula may be used (cf. Corollary 2.2) such that in turn the differential Grönwall inequality applies. We mention anew that a very similar result has recently appeared in ( [33] , Theorem 2).
which implies that the differential form (2.7) of Dynkin’s formula may be used (cf. Corollary 2.2) such that in turn the differential Grönwall inequality applies. We mention anew that a very similar result has recently appeared in ( [33] , Theorem 2).
Theorem 4.9 (Ergodicity) Under Assumption 4.1 (1), (2), suppose that
 (4.21)
(4.21)
Then for integer ,
,  remains bounded as
remains bounded as .
.
Proof. The case  is slightly more complicated to obtain so we shall concentrate on this. We omit the case
is slightly more complicated to obtain so we shall concentrate on this. We omit the case  since it follows from (4.5) under the present assumptions. The idea of the proof is to asymptotically
since it follows from (4.5) under the present assumptions. The idea of the proof is to asymptotically
bound  with a certain positive constant
with a certain positive constant  to be decided upon below. By (2.7) we get with
to be decided upon below. By (2.7) we get with ,
,
 (4.22)
(4.22)
by Taylor’s formula for some . Using the assumptions we get the bound
. Using the assumptions we get the bound
 (4.23)
(4.23)
For the first term in (4.23) we get from the scaled Young’s inequality with exponent  and conjugate exponent
and conjugate exponent  that
that

for some . As for the second term in (4.23) we first estimate for
. As for the second term in (4.23) we first estimate for 

Next by the arithmetic-geometric mean inequality we get

provided that we choose  as the solution to the equation
as the solution to the equation
 (4.24)
(4.24)
Taken together we thus have

Since  we may pick a small enough
we may pick a small enough  such that the bracketed expression remains negative. By Grönwall’s inequality this then proves the result with
such that the bracketed expression remains negative. By Grönwall’s inequality this then proves the result with . To prove the case
. To prove the case  the same idea of proof applies and results in
the same idea of proof applies and results in

for a certain new constant  satisfying an equation similar to (4.24).
satisfying an equation similar to (4.24). 
We next aim at deriving some stability estimates with respect to perturbations in the reaction coefficients. An early account of this was given by Kurtz in [31] , see also [18] for a recent discussion in a bounded setting. Given the linear dependence on the coefficients ,
,  in the elementary reactions (2.3) a suitable model seems to be that a perturbation
in the elementary reactions (2.3) a suitable model seems to be that a perturbation  in a propensity
in a propensity  spreads linearly in a relative sense,
spreads linearly in a relative sense,
 (4.25)
(4.25)
We make this formal by requiring that
 (4.26)
(4.26)
where  is a suitable measure of the total perturbation vector and where the perturbed propensity vector function is given by
is a suitable measure of the total perturbation vector and where the perturbed propensity vector function is given by
 (4.27)
(4.27)
The existence of an absolute constant  in (4.26) follows from Assumption 4.1 (3). We further conveniently assume that the entire statement of Assumption 4.1 carries over to the perturbed system, and for convenience we shall also assume that all constants are the same. By the triangle inequality and Assumption 4.1 (3) we obtain from (4.26) the bound
in (4.26) follows from Assumption 4.1 (3). We further conveniently assume that the entire statement of Assumption 4.1 carries over to the perturbed system, and for convenience we shall also assume that all constants are the same. By the triangle inequality and Assumption 4.1 (3) we obtain from (4.26) the bound
 (4.28)
(4.28)
with  some constant and where the simplification in (4.28) assumes an a priori bound (e.g. stopping time)
some constant and where the simplification in (4.28) assumes an a priori bound (e.g. stopping time)  and additionally requires the integer inequality.
and additionally requires the integer inequality.
The starting point for the analysis will be Itô’s formula under the coupling described in Section 2.2.2. The techniques used below generalize well to pth order moment estimates, but for ease of exposition we let .
.
Hence under the model for coefficient perturbations (4.26)-(4.27) we have that
 (4.29)
(4.29)
Theorem 4.10 (Continuity). Let two trajectories  and
and  be given, with the same initial data and coupled according to the discussion in Section 2.2.2. Let the propensities for
be given, with the same initial data and coupled according to the discussion in Section 2.2.2. Let the propensities for  be perturbed by
be perturbed by  as indi- cated in (4.26), (4.27). Then
as indi- cated in (4.26), (4.27). Then
 (4.30)
(4.30)
Proof. We use the stopping time  and put
and put . From (4.29) we get
. From (4.29) we get
 (4.31)
(4.31)
where (4.28) was used. Simplifying further for a bounded  we get
we get

Using that  and Grönwall’s inequality we conclude that
and Grönwall’s inequality we conclude that

To get rid of the stopping time we write in terms of indicator functions,
 (4.32)
(4.32)
Using  we get from Markov’s inequality and the previous estimate
we get from Markov’s inequality and the previous estimate
 (4.33)
(4.33)
Relying on the existence result in Theorem 4.7 we find that for any given  we can select
we can select  (and hence also
(and hence also ) such that the right term is
) such that the right term is . We can next find
. We can next find  such that for all
such that for all , also the left term is
, also the left term is . Hence for all
. Hence for all ,
,  as claimed.
as claimed. 
As a by-product of the proof we see that if the process is bounded, then for  large enough the probability in (4.32) is zero.
large enough the probability in (4.32) is zero.
Corollary 4.11 (Perturbation estimate, bounded version) If in Theorem 4.10, the processes  and
and  are bounded, then for a constant
are bounded, then for a constant ,
,
 (4.34)
(4.34)
The constant  in (4.34) can be bounded explicitly by inspection of (4.28) and (4.31).
in (4.34) can be bounded explicitly by inspection of (4.28) and (4.31).
For an unbounded system it is apparently much more difficult to obtain explicit estimates. However, by controlling also the martingale part we can strengthen Theorem 4.10 in another direction.
Theorem 4.12 (Continuity/sup) Under the same assumptions as Theorem 4.10 we have that
 (4.35)
(4.35)
Proof. The quadratic variation of the martingale part in (4.29) can be bounded as

after using (4.28) and the integer inequality anew. For the drift part we may use the corresponding bound developed in the proof of Theorem 4.10. After taking supremum and expectation values of (4.29) and using Burkholder's inequality we therefore arrive at

by Grönwall’s inequality and using the notation . We now rely on the same strategy as in the proof of Theorem 4.10 to similarly arrive at
. We now rely on the same strategy as in the proof of Theorem 4.10 to similarly arrive at

and the conclusion follows as before.
5. Conclusions
We have proposed a theoretical framework consisting of a priori assumptions and estimates for problems in stochastic chemical kinetics. The assumptions are strong enough to guarantee well-posedness for a large and physically relevant class of problems. Long time estimates and limit results for perturbations in rate constants have been studied to exemplify the theory. The assumptions are constructive in the sense that explicit techniques for obtaining all postulated constants have either been worked out in detail or at least indicated. We have seen that the case  in Assumption 4.1 (2) is particularly promising from the analysis point of view in that the conditions for existence in Theorem 4.7 and the ergodicity in Theorem 4.9 both can be formulated naturally.
in Assumption 4.1 (2) is particularly promising from the analysis point of view in that the conditions for existence in Theorem 4.7 and the ergodicity in Theorem 4.9 both can be formulated naturally.
In the course of motivating our setup we have seen that most problems do not admit global Lipschitz constants and that one-sided versions do not provide a better alternative. Another conclusion worth highlighting is that it pays off to consider jump SDEs in a fully discrete setting in that there are potential complications in proving uniqueness in continuous state space. A practical implication is that care should be exercised when forming continuous approximations to these types of jump SDEs.
For future work we intend to re-visit certain classical results from the perspective of the framework developed herein; for example, thermodynamic limit results, time discretization strategies, and quasi-steady state approximations―all of which have a practical impact in a range of applications.
Acknowledgements
The author likes to express his sincere gratitude to Takis Konstantopoulos for several fruitful and clarifying discussions. Early inputs on this work were also gratefully obtained from Henrik Hult, Ingemar Kaj, and Per Lötstedt.
This work was supported by the Swedish Research Council within the UPMARC Linnaeus center of Excellence.
References
- Lestas, I., Vinnicombe, G. and Paulsson, J. (2010) Fundamental Limits on the Suppression of Molecular Fluctuations. Nature, 467, 174-178. http://dx.doi.org/10.1038/nature09333
- Raj, A. and van Oudenaarden, A. (2008) Nature, Nurture, or Chance: Stochastic Gene Expression and Its Consequences. Cell, 135, 216-226. http://dx.doi.org/10.1016/j.cell.2008.09.050
- Samoilov, M.S. and Arkin, A.P. (2006) Deviant Effects in Molecular Reaction Pathways. Nature Biotechnology, 24, 1235-1240. http://dx.doi.org/10.1038/nbt1253
- Gillespie, D.T. (1976) A General Method for Numerically Simulating the Stochastic Time Evolution of Coupled Chemical Reactions. Journal of Computational Physics, 22, 403-434. http://dx.doi.org/10.1016/0021-9991(76)90041-3
- Gillespie, D.T. (1992) A Rigorous Derivation of the Chemical Master Equation. Physica A, 188, 404-425. http://dx.doi.org/10.1016/0378-4371(92)90283-V
- Protter, P.E. (2005) Stochastic Integration and Differential Equations. Number 21 in Stochastic Modelling and Applied Probability. 2nd Edition, Version 2.1, Springer, Berlin.
- Applebaum, D. (2004) Lévy Processes and Stochastic Calculus, Volume 93 of Cambridge Studies in Advanced Mathematics. Cambridge University Press, Cambridge.
- Situ, R. (2005) Theory of Stochastic Differential Equations with Jumps and Applications. Mathematical and Analytical Techniques with Applications to Engineering. Springer, New York.
- Øksendal, B. and Zhang, T. (2007) The Itô-Ventzell Formula and Forward Stochastic Differential Equations Driven by Poisson Random Measures. Osaka Journal of Mathematics, 44, 207-230.
- Hausenblas, E. (2007) SPDEs Driven by Poisson Random Measure with Non Lipschitz Coefficients: Existence Results. Probability Theory and Related Fields, 137, 161-200.
- Marinelli, C., Prévôt, C. and Röckner, M. (2010) Regular Dependence on Initial Data for Stochastic Evolution Equations with Multiplicative Poisson Noise. Journal of Functional Analysis, 258, 616-649. http://dx.doi.org/10.1016/j.jfa.2009.04.015
- Marinelli, C. and Röckner, M. (2010) Well-Posedness and Asymptotic Behavior for Stochastic Reaction-Diffusion Equations with Multiplicative Poisson Noise. Electronic Journal of Probability, 15, 1529-1555. http://dx.doi.org/10.1214/EJP.v15-818
- Filipović, D., Tappe, S. and Teichmann, J. (2010) Jump-Diffusions in Hilbert Spaces: Existence, Stability and Numerics. Stochastics, 82, 475-520. http://dx.doi.org/10.1080/17442501003624407
- van Kampen, N.G. (2004) Stochastic Processes in Physics and Chemistry. 2nd Edition, Elsevier, Amsterdam.
- Higham, D.J. and Kloeden, P.E. (2005) Numerical Methods for Nonlinear Stochastic Differential Equations with Jumps. Numerische Mathematik, 101, 101-119. http://dx.doi.org/10.1007/s00211-005-0611-8
- Li, T.J. (2007) Analysis of Explicit Tau-Leaping Schemes for Simulating Chemically Reacting Systems. Multiscale Modeling & Simulation, 6, 417-436. http://dx.doi.org/10.1137/06066792X
- Engblom, S. (2009) Parallel in Time Simulation of Multiscale Stochastic Chemical Kinetics. Multiscale Modeling & Simulation, 8, 46-68. http://dx.doi.org/10.1137/080733723
- Anderson, D.F. (2012) An Efficient Finite Difference Method for Parameter Sensitivities of Continuous Time Markov Chains. SIAM Journal on Numerical Analysis, 50, 2237-2258. http://dx.doi.org/10.1137/110849079
- Kawamura, A. (2009) Lipschitz Continuous Ordinary Differential Equations Are Polynomial-Space Complete. 24th Annual IEEE Conference on Computational Complexity, Paris, 15-18 July 2009, 149-160.
- Hutzenthaler, M., Jentzen, A. and Kloeden, P.E. (2011) Strong and Weak Divergence in Finite Time of Euler’s Method for Stochastic Differential Equations with Non-Globally Lipschitz Continuous Coefficients. Proceedings of the Royal Society A, 467, 1563-1576.
- Chen, W.Y. and Bokka, S. (2005) Stochastic Modeling of Nonlinear Epidemiology. Journal of Theoretical Biology, 234, 455-470. http://dx.doi.org/10.1016/j.jtbi.2004.11.033
- Ewens, W.J. (2004) Mathematical Population Genetics I. Theoretical Introduction, Volume 27 of Interdisciplinary Applied Mathematics. 2nd Edition, Springer, New York.
- Escudero, C., Buceta, J., de la Rubia, F.J. and Lindenberg, K. (2004) Extinction in Population Dynamics. Physical Review E, 69, 021908.
- Ethier, S.N. and Kurtz, T.G. (1986) Markov Processes: Characterization and Convergence. Wiley Series in Probability and Mathematical Statistics. John Wiley & Sons, New York. http://dx.doi.org/10.1002/9780470316658
- Brémaud, P. (1999) Markov Chains: Gibbs Fields, Monte Carlo Simulation, and Queues. Number 31 in Texts in Applied Mathematics. Springer, New York. http://dx.doi.org/10.1007/978-1-4757-3124-8
- Plyasunov, S. (2005) On Hybrid Simulation Schemes for Stochastic Reaction Dynamics. http://arxiv.org/abs/math/0504477
- Brémaud, P. (1981) Point Processes and Queues: Martingale Dynamics. Springer Series in Statistics. Springer, New York.
- Daley, D.J. and Vere-Jones, D. (2003) An Introduction to the Theory of Point Processes, Volume I: Elementary Theory and Methods. 2nd Edition, Springer, New York.
- Kurtz, T.G. (1978) Strong Approximation Theorems for Density Dependent Markov Chains. Stochastic Processes and Their Applications, 6, 223-240. http://dx.doi.org/10.1016/0304-4149(78)90020-0
- Rathinam, M., Sheppard, P.W. and Khammash, M. (2010) Efficient Computation of Parameter Sensitivities of Discrete Stochastic Chemical Reaction Networks. Journal of Chemical Physics, 132, 034103. http://dx.doi.org/10.1063/1.3280166
- Kurtz, T.G. (1982) Representation and Approximation of Counting Processes. In: Fleming, W.H. and Gorostiza, L.G., Eds., Advances in Filtering and Optimal Stochastic Control, Vol. 42, Lecture Notes in Control and Information Sciences, Springer, Berlin, 177-191.
- Ström, T. (1975) On Logarithmic Norms. SIAM Journal on Numerical Analysis, 12, 741-753. http://dx.doi.org/10.1137/0712055
- Briat, C., Gupta, A. and Khammash, M. (2014) A Scalable Computational Framework for Establishing Long-Term Behavior of Stochastic Reaction Networks. PLoS Computational Biology, 10, e1003669.
- Rathinam, M. (2014) Moment Growth Bounds on Continuous Time Markov Processes on Non-Negative Integer Lattices. To appear in Quart. Appl. Math. http://arxiv.org/abs/1304.5169
- Meyn, S.P. and Tweedie, R.L. (1993) Stability of Markovian Processes III: Foster-Lyapunov Criteria for Continuous- Time Processes. Advances in Applied Probability, 25, 518-548. http://dx.doi.org/10.2307/1427522