 Journal of Quantum Information Science, 2012, 2, 66-77 http://dx.doi.org/10.4236/jqis.2012.23012 Published Online September 2012 (http://www.SciRP.org/journal/jqis) Entanglement in Livings Michail Zak Jet Propulsion Laboratory, California Institute of Technology, Pasadena, USA Email: michail.zak@gmail.com Received May 5, 2012; revised May 28, 2012; accepted June 28, 2012 ABSTRACT This paper discusses quantum-inspired models of Livings from the viewpoint of information processing. The model of Livings consists of motor dynamics simulating actual behavior of the object, and mental dynamics representing evolu- tion of the corresponding knowledge-base and incorporating it in the form of information flows into the motor dynamics. Due to feedback from mental dynamics, the motor dynamics attains quantum-like properties: its trajectory splits into a family of different trajectories, and each of those trajectories can be chosen with the probability prescribed by the men- tal dynamics The paper concentrates on discovery of a new type of entanglement that correlates the probabilities of ac- tions of Livings rather than the actions themselves. Keywords: Entanglement; Information; Motor/Mental Dynamics; Probability; Feedback 1. Introduction This paper is based upon models of Livings introduced in our earlier publications [1,2] and motivated by an attempt to interpret special properties of probability density dis- tribution when conditional densities are incompatible [3], and for that reason, the joint density does not exists. We will start with a brief description of mathematical models of Livings. 1.1. Dynamical Model of Livings In this paper, the underlying dynamical model that cap- tures behavior of Livings is based upon extension of the First Principles of classical physics to include phenome- nological behavior of living systems, i.e. to develop a new mathematical formalism within the framework of classical dynamics that would allow one to capture the specific properties of natural or artificial living systems such as formation of the collective mind based upon ab- stract images of the selves and non-selves, exploitation of this collective mind for communications and predictions of future expected characteristics of evolution, as well as for making decisions and implementing the correspond- ing corrections if the expected scenario is different from the originally planned one. The approach is based upon our previous publications (see References) that postulate that even a primitive living species possesses additional non-Newtonian properties which are not included in the laws of Newtonian or statistical mechanics. These prop- erties follow from a privileged ability of living systems to possess a self-image (a concept introduced in psy- chology) and to interact with it. The proposed mathe- matical formalism is quantum-inspired: it is based upon coupling the classical dynamical system representing the motor dynamics with the corresponding Liouville equa- tion describing the evolution of initial uncertainties in terms of the probability density and representing the mental dynamics. (Compare with the Madelung equation that couples the Hamilton-Jacobi and Liouville equations via the quantum potential).The coupling is implemented by the information-based supervising forces that can be associated with the self-awareness. These forces funda- mentally change the pattern of the probability evolution, and therefore, leading to a major departure of the behav- ior of living systems from the patterns of both Newtonian and statistical mechanics. Further extension, analysis, interpretation, and application of this approach to com- plexity in Livings and emergent intelligence have been addressed in the papers referenced above. In the next introductory sub-sections we will briefly review these models without going into mathematical details. Instead we will illustrate their performance by the Figure 1. The model is represented by a system of nonlinear ODE and a nonlinear parabolic PDE coupled in a mas- ter-slave fashion. The coupling is implemented by a feedback that includes the first gradient of the probability density, and that converts the first order PDE (the Liou- ville equation) to the second order PDE (the Fokker- Planck equation). Its solution, in addition to positive dif- fusion, can display negative diffusion as well, and that is the major departure from the classical Fokker-Planck equation. The nonlinearity is generated by a feedback from the PDE to the ODE. As a result of the nonlinearity, C opyright © 2012 SciRes. JQIS 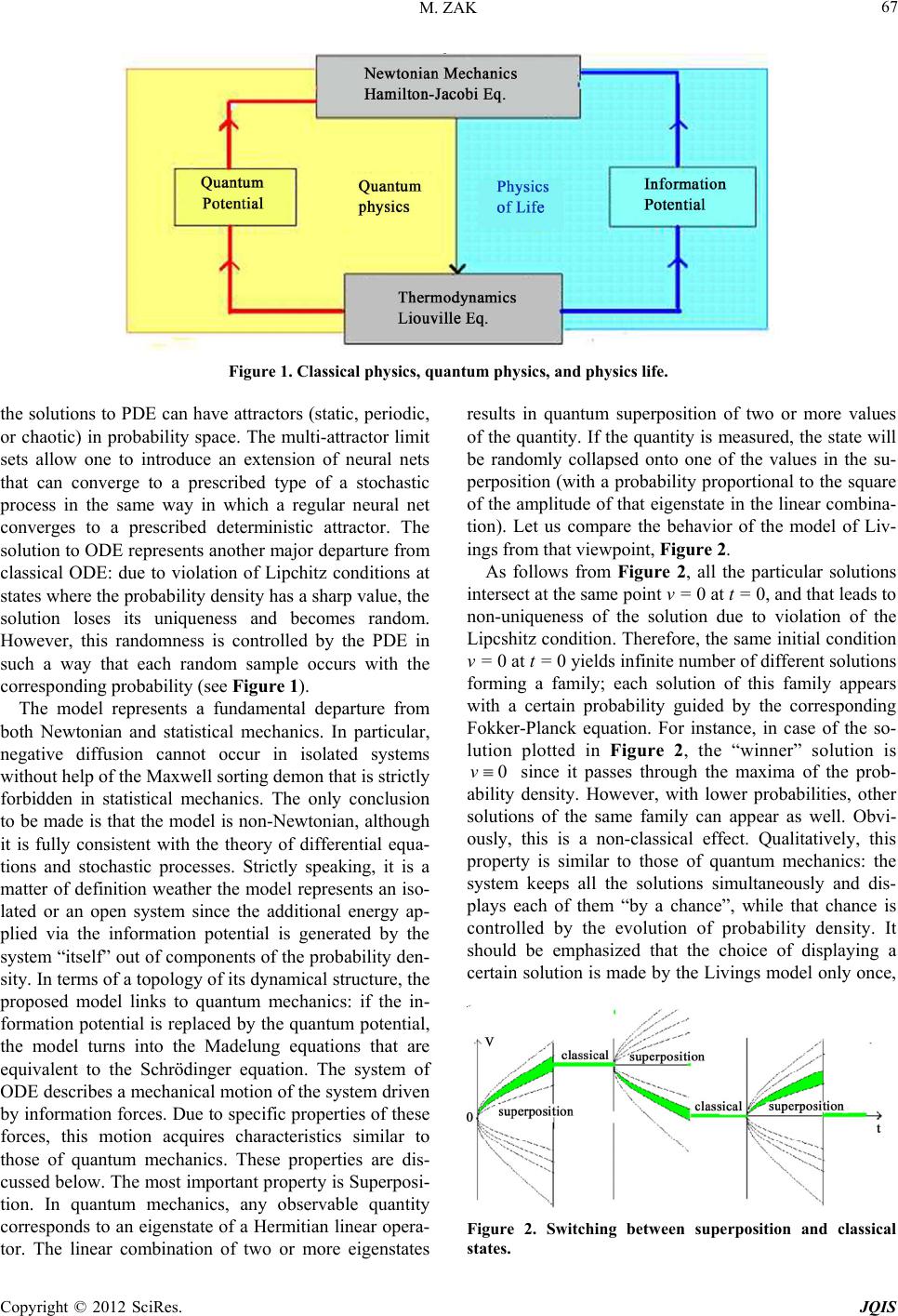 M. ZAK 67 Figure 1. Classical physics, quantum physics, and physics life. the solutions to PDE can have attractors (static, periodic, or chaotic) in probability space. The multi-attractor limit sets allow one to introduce an extension of neural nets that can converge to a prescribed type of a stochastic process in the same way in which a regular neural net converges to a prescribed deterministic attractor. The solution to ODE represents another major departure from classical ODE: due to violation of Lipchitz conditions at states where the probability density has a sharp value, the solution loses its uniqueness and becomes random. However, this randomness is controlled by the PDE in such a way that each random sample occurs with the corresponding probability (see Figure 1). The model represents a fundamental departure from both Newtonian and statistical mechanics. In particular, negative diffusion cannot occur in isolated systems without help of the Maxwell sorting demon that is strictly forbidden in statistical mechanics. The only conclusion to be made is that the model is non-Newtonian, although it is fully consistent with the theory of differential equa- tions and stochastic processes. Strictly speaking, it is a matter of definition weather the model represents an iso- lated or an open system since the additional energy ap- plied via the information potential is generated by the system “itself” out of components of the probability den- sity. In terms of a topology of its dynamical structure, the proposed model links to quantum mechanics: if the in- formation potential is replaced by the quantum potential, the model turns into the Madelung equations that are equivalent to the Schrödinger equation. The system of ODE describes a mechanical motion of the system driven by information forces. Due to specific properties of these forces, this motion acquires characteristics similar to those of quantum mechanics. These properties are dis- cussed below. The most important property is Superposi- tion. In quantum mechanics, any observable quantity corresponds to an eigenstate of a Hermitian linear opera- tor. The linear combination of two or more eigenstates results in quantum superposition of two or more values of the quantity. If the quantity is measured, the state will be randomly collapsed onto one of the values in the su- perposition (with a probability proportional to the square of the amplitude of that eigenstate in the linear combina- tion). Let us compare the behavior of the model of Liv- ings from that viewpoint, Figure 2. As follows from Figure 2, all the particular solutions intersect at the same point v = 0 at t = 0, and that leads to non-uniqueness of the solution due to violation of the Lipcshitz condition. Therefore, the same initial condition v = 0 at t = 0 yields infinite number of different solutions forming a family; each solution of this family appears with a certain probability guided by the corresponding Fokker-Planck equation. For instance, in case of the so- lution plotted in Figure 2, the “winner” solution is 0v since it passes through the maxima of the prob- ability density. However, with lower probabilities, other solutions of the same family can appear as well. Obvi- ously, this is a non-classical effect. Qualitatively, this property is similar to those of quantum mechanics: the system keeps all the solutions simultaneously and dis- plays each of them “by a chance”, while that chance is controlled by the evolution of probability density. It should be emphasized that the choice of displaying a certain solution is made by the Livings model only once, Figure 2. Switching between superposition and classical states. Copyright © 2012 SciRes. JQIS  M. ZAK 68 and in particular, at the instant of time when the feedback is removed and the dynamical system becomes a Newto- nian’s one. Therefore, the removal of the feedback can be associated with a quantum measurement. Modified ver- sions of such quantum properties as uncertainty and en- tanglement are also described in the referenced papers. The model illuminates the “border line” between liv- ing and non-living systems. The model introduces a bio- logical particle that, in addition to Newtonian properties, possesses the ability to process information. The prob- ability density can be associated with the self-image of the biological particle as a member of the class to which this particle belongs, while its ability to convert the den- sity into the information force—with the self-awareness (both these concepts are adopted from psychology). Con- tinuing this line of associations, the equation of motion can be identified with a motor dynamics, while the evo- lution of density—with a mental dynamics. Actually the mental dynamics plays the role of the Maxwell sorting demon: it rearranges the probability distribution by cre- ating the information potential and converting it into a force that is applied to the particle. One should notice that mental dynamics describes evolution of the whole class of state variables (differed from each other only by initial conditions), and that can be associated with the ability to generalize that is a privilege of living systems. Continuing our biologically inspired interpretation, it should be recalled that the second law of thermodynam- ics states that the entropy of an isolated system can only increase. This law has a clear probabilistic interpretation: increase of entropy corresponds to the passage of the system from less probable to more probable states, while the highest probability of the most disordered state (that is the state with the highest entropy) follows from a sim- ple combinatorial analysis. However, this statement is correct only if there is no Maxwell’ sorting demon, i.e. nobody inside the system is rearranging the probability distributions. But this is precisely what the Liouville feedback is doing: it takes the probability density from the mental dynamics, creates functions of this den- sity, converts them into a force and applies this force to the equation of motor dynamics. As already mentioned above, because of that property of the model, the evolu- tion of the probability density becomes nonlinear, and the entropy may decrease “against the second law of ther- modynamics”, Figure 3. Obviously the last statement should not be taken literary; indeed, the proposed model captures only those aspects of the living systems that are associated with their behavior, and in particular, with their motor-mental dynamics, since other properties are beyond the dynamical formalism. Therefore, such physiological processes that are needed for the metabo- lism are not included into the model. That is why this model is in a formal disagreement with the second law of thermodynamics while the living systems are not. In or- der to further illustrate the connection between the life/ non-life discrimination and the second law of thermody- namics, consider a small physical particle in a state of random migration due to thermal energy, and compare its diffusion i.e. physical random walk, with a biological random walk performed by a bacterium. The fundamen- tal difference between these two types of motions (that may be indistinguishable in physical space) can be de- tected in probability space: the probability density evolu- tion of the physical particle is always linear and it has only one attractor: a stationary stochastic process where the motion is trapped. On the contrary, a typical prob- ability density evolution of a biological particle is non- linear: it can have many different attractors, but eventu- ally each attractor can be departed from without any “help” from outside. That is how H. Berg [7], describes the random walk of an E. coli bacterium: “If a cell can diffuse this well by working at the limit imposed by rotational Brownian movement, why does it bother to tumble? The answer is that the tumble provides the cell with a mechanism for biasing its random walk. When it swims in a spatial gra- dient of a chemical attractant or repellent and it happens to run in a favorable direction, the probability of tum- bling is reduced. As a result, favorable runs are extended, and the cell diffuses with drift.” Berg argues that the cell analyzes its sensory cue and generates the bias internally, by changing the way in which it rotates its flagella. This description demonstrates that actually a bacterium inter- acts with the medium, i.e. it is not isolated, and that rec- onciles its behavior with the second law of thermody- namics. However, since these interactions are beyond the dynamical world, they are incorporated into the proposed model via the self-supervised forces that result from the interactions of a biological particle with “itself”, and that formally “violates” the second law of thermodynamics. Thus, this model offers a unified description of the pro- gressive evolution of living systems. More sophisticated effects that shed light on relationships between Livings Figure 3. Deviation from thermodynamics. Copyright © 2012 SciRes. JQIS 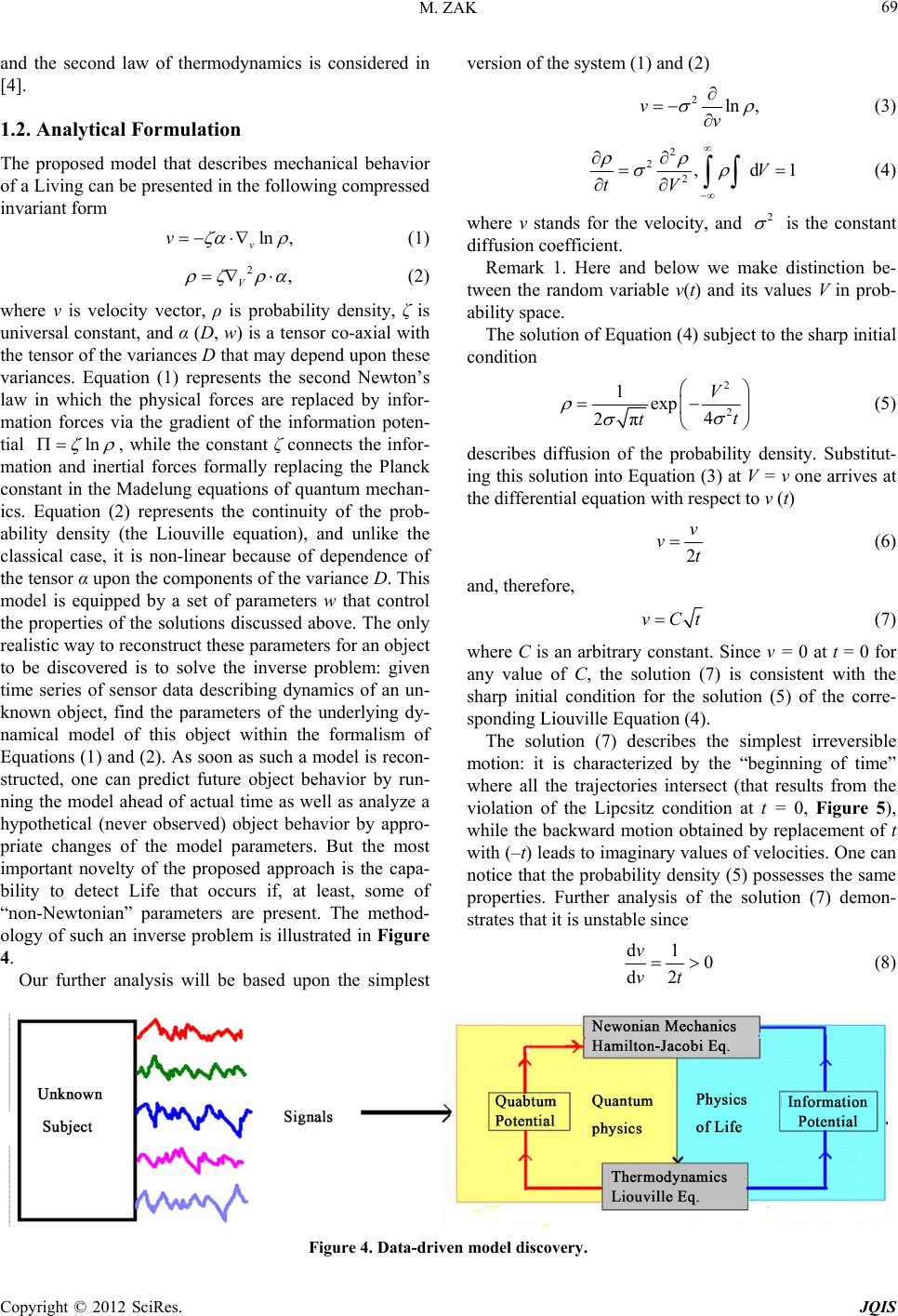 M. ZAK Copyright © 2012 SciRes. JQIS 69 and the second law of thermodynamics is considered in [4]. 1.2. Analytical Formulation The proposed model that describes mechanical behavior of a Living can be presented in the following compressed invariant form ln , v v (1) 2, V (2) where ν is velocity vector, ρ is probability density, ζ is universal constant, and α (D, w) is a tensor co-axial with the tensor of the variances D that may depend upon these variances. Equation (1) represents the second Newton’s law in which the physical forces are replaced by infor- mation forces via the gradient of the information poten- tial ln , while the constant ζ connects the infor- mation and inertial forces formally replacing the Planck constant in the Madelung equations of quantum mechan- ics. Equation (2) represents the continuity of the prob- ability density (the Liouville equation), and unlike the classical case, it is non-linear because of dependence of the tensor α upon the components of the variance D. This model is equipped by a set of parameters w that control the properties of the solutions discussed above. The only realistic way to reconstruct these parameters for an object to be discovered is to solve the inverse problem: given time series of sensor data describing dynamics of an un- known object, find the parameters of the underlying dy- namical model of this object within the formalism of Equations (1) and (2). As soon as such a model is recon- structed, one can predict future object behavior by run- ning the model ahead of actual time as well as analyze a hypothetical (never observed) object behavior by appro- priate changes of the model parameters. But the most important novelty of the proposed approach is the capa- bility to detect Life that occurs if, at least, some of “non-Newtonian” parameters are present. The method- ology of such an inverse problem is illustrated in Figure 4. Our further analysis will be based upon the simplest version of the system (1) and (2) 2ln ,vv (3) 2 2 2,dV tV 1 (4) where v stands for the velocity, and 2 is the constant diffusion coefficient. Remark 1. Here and below we make distinction be- tween the random variable v(t) and its values V in prob- ability space. The solution of Equation (4) subject to the sharp initial condition 2 2 1exp 4 2π V t t (5) describes diffusion of the probability density. Substitut- ing this solution into Equation (3) at V = v one arrives at the differential equation with respect to v (t) 2 v vt (6) and, therefore, vCt (7) where C is an arbitrary constant. Since v = 0 at t = 0 for any value of C, the solution (7) is consistent with the sharp initial condition for the solution (5) of the corre- sponding Liouville Equation (4). The solution (7) describes the simplest irreversible motion: it is characterized by the “beginning of time” where all the trajectories intersect (that results from the violation of the Lipcsitz condition at t = 0, Figure 5), while the backward motion obtained by replacement of t with (–t) leads to imaginary values of velocities. One can notice that the probability density (5) possesses the same properties. Further analysis of the solution (7) demon- strates that it is unstable since d1 0 d2 v vt (8) Figure 4. Data-driven model discovery. 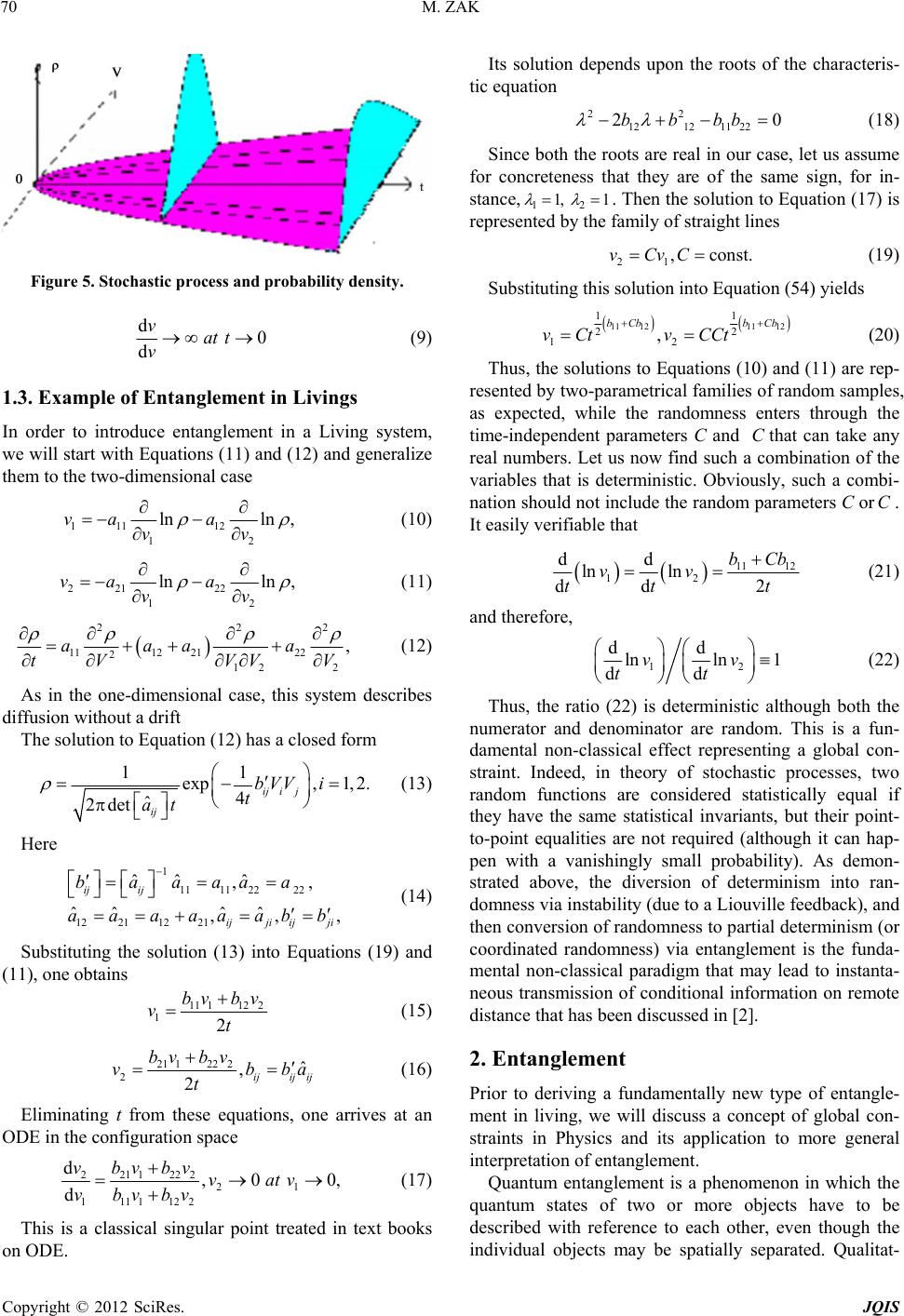 M. ZAK 70 Figure 5. Stochastic process and probability density. d 0 d vat t v (9) 1.3. Example of Entanglement in Livings In order to introduce entanglement in a Living system, we will start with Equations (11) and (12) and generalize them to the two-dimensional case 111 12 12 lnln ,va a vv (10) 221 22 12 lnln ,va a vv (11) 22 1112 2122 2 12 2 ,aaa a tVV V 2 V (12) As in the one-dimensional case, this system describes diffusion without a drift The solution to Equation (12) has a closed form 11 exp,1, 2. 4 ˆ 2det ij ij ij bVVi t at , (13) Here 1 1111 2222 1221 12 21 ˆˆ ˆ ,, ˆˆˆˆ ,, ij ij ijji ijji baaaaa aaaaaabb (14) Substituting the solution (13) into Equations (19) and (11), one obtains 11 1122 12 bv bv vt (15) 21 1222 2ˆ , 2ijij ij bv bv vb t ba (16) Eliminating t from these equations, one arrives at an ODE in the configuration space 2211222 21 1111122 d,0 d vbvbv vatv vbvbv 0, (17) This is a classical singular point treated in text books on ODE. Its solution depends upon the roots of the characteris- tic equation 22 121211 22 20bbbb (18) Since both the roots are real in our case, let us assume for concreteness that they are of the same sign, for in- stance, 12 1, 1 . Then the solution to Equation (17) is represented by the family of straight lines 21 ,consvCvCt. (19) Substituting this solution into Equation (54) yields (20) 11 1211 12 11 22 12 , bCb bCb v CtvCCt Thus, the solutions to Equations (10) and (11) are rep- resented by two-parametrical families of random samples, as expected, while the randomness enters through the time-independent parameters C and that can take any real numbers. Let us now find such a combination of the variables that is deterministic. Obviously, such a combi- nation should not include the random parameters C or C. It easily verifiable that C 11 12 12 dd ln ln dd 2 bCb vv tt t (21) and therefore, 12 dd lnln 1 dd vv tt (22) Thus, the ratio (22) is deterministic although both the numerator and denominator are random. This is a fun- damental non-classical effect representing a global con- straint. Indeed, in theory of stochastic processes, two random functions are considered statistically equal if they have the same statistical invariants, but their point- to-point equalities are not required (although it can hap- pen with a vanishingly small probability). As demon- strated above, the diversion of determinism into ran- domness via instability (due to a Liouville feedback), and then conversion of randomness to partial determinism (or coordinated randomness) via entanglement is the funda- mental non-classical paradigm that may lead to instanta- neous transmission of conditional information on remote distance that has been discussed in [2]. 2. Entanglement Prior to deriving a fundamentally new type of entangle- ment in living, we will discuss a concept of global con- straints in Physics and its application to more general interpretation of entanglement. Quantum entanglement is a phenomenon in which the quantum states of two or more objects have to be described with reference to each other, even though the individual objects may be spatially separated. Qualitat- Copyright © 2012 SciRes. JQIS  M. ZAK 71 ively similar effect has been demonstrated in living systems: as follows from the example considered in the previous section, the diversion of determinism into ran- domness via instability (due to a Liouville feedback), and then conversion of randomness to partial determinism (or coordinated randomness) via entanglement is the funda- mental non-classical paradigm that may lead to instanta- neous transmission of conditional information on remote distance [2]. In this connection, it is reasonable to make some comments about non-locality in physics. As al- ready mentioned above, the living systems and quantum systems have similar topology (see Figure 1). In this section, we will analyze the similarities in terms of en- tanglement that follow from this topology. 2.1. Criteria for Non-Local Interactions Based upon analysis of all the known interactions in the Universe and defining them as local, one can formulate the following criteria of non-local interactions: they are not mediated by another entity, such as a particle or field; their actions are not limited by the speed of light; the strength of the interactions does not drop off with dis- tance. All of these criteria lead us to the concept of the global constraint as a starting point. 2.2. Global Constraints in Physics It should be recalled that the concept of a global con- straint is one of the main attribute of Newtonian me- chanics. It includes such idealizations as a rigid body, an incompressible fluid, an inextensible string and a mem- brane, a non-slip rolling of a rigid ball over a rigid body, etc. All of those idealizations introduce geometrical or kinematical restrictions to positions or velocities of parti- cles and provide “instantaneous” speed of propagation of disturbances. Let us discuss the role of the reactions of these constraints. One should recall that in an income- pressible fluid, the reaction of the global constraint (expressing non-negative divergence of the velocity v) is a non-negative pressure ; in inexten- sible flexible (one- or two-dimensional) bodies, the reac- tion of the global constraint ij ij 0v 0p , 0 g i, j = 1, 2 (ex- pressing that the components of the metric tensor cannot exceed their initial values) is a non-negative stress tensor 0 ij , i, j = 1, 2. It should be noticed that all the known forces in physics (the gravitational, the electromagnetic, the strong and the weak nuclear forces) are local. How- ever, the reactions of the global constraints listed above do not belong to any of these local forces, and therefore, they are non-local. Although these reactions are being successfully applied for engineering approximations of theoretical physics, one cannot relate them to the origin of entanglement since they are result of idealization that ignores the discrete nature of the matter. However, there is another type of the global constraint in physics: the normalization constraint (see Equation (4)). This con- straint is fundamentally different from those listed above for two reasons. Firstly, it is not an idealization, and therefore, it cannot be removed by taking into account more subtle properties of matter such as elasticity, com- pressibility, discrete structure, etc. Secondly, it imposes restrictions not upon positions or velocities of particles, but upon the probabilities of their positions or velocities, and that is where the entanglement comes from. Indeed, if the Liouville equation is coupled with equations of motion as in quantum mechanics, the normalization con- dition imposes a global constraint upon the state vari- ables, and that is the origin of quantum entanglement. In quantum physics, the reactions of the normalization con- straints can be associated with the energy eigenvalues that play the role of the Lagrange multipliers in the con- ditional extremum formulation of the Schrödinger equa- tion [5]. In living systems, the Liouville equation is also coupled with equations of motion (although the feedback is different). And that is why the origin of entanglement in living systems is the same as in quantum mechanics. 2.3. Speed of Action Propagation Further illumination of the concept of quantum entan- glement follows from comparison of quantum and New- tonian systems. Such a comparison is convenient to per- form in terms of the Madelung version of the Schrödinger equation: 0S tm (23) 22 20 2 SSV tm (24) Here and S are the components of the wave func- tion /iS e , and is the Planck constant divided by . The Newtonian mechanics (), in terms of the S and 2π0 as state variables, is of a hyperbolic type, and therefore, any discontinuity propagates with the fi- nite speed S/m, i.e. the Newtonian systems do not have non-localities. But the quantum mechanics (0 ) is of a parabolic type. This means that any disturbance of S or in one point of space instantaneously transmitted to the whole space, and this is the mathematical origin of non-locality. But is this a unique property of quantum evolution? Obviously, it is not. Any parabolic equation (such as Navier-Stokes equations or Fokker-Planck equa- tion) has exactly the same non-local properties. However, the difference between the quantum and classical non- localities is in their physical interpretation. Indeed, the Navier-Stokes equations are derived from simple laws of Newtonian mechanics, and that is why a physical inter- Copyright © 2012 SciRes. JQIS  M. ZAK 72 pretation of non-locality is very simple: If a fluid is in- compressible, then the pressure plays the role of a reac- tion to the geometrical constraint , and it is transmitted instantaneously from one point to the whole space (the Pascal law). One can argue that the incom- pressible fluid is an idealization, and that is true. How- ever, it does not change our point: Such a model has a lot of engineering applications, and its non-locality is well understood. The situation is different in quantum me- chanics since the Schrodinger equation has never been derived from Newtonian mechanics: It has been postu- lated. In addition to that, the solutions of the Schrodinger equation are random, while the origin of the randomness does not follow from the Schrodinger formalism. That is why the physical origin of the same mathematical phe- nomenon cannot be reduced to simpler concepts such as “forces”: It should be accepted as an attribute of the Schrodinger equation. 0v Let us turn now to the living systems. The formal dif- ference between them and quantum systems is in a feed- back from the Liouville equation to equations of motion: the gradient of the quantum potential is replaced by the information forces, while the equations of motion are written in the form of the second Newton’s law rather than in the Hamilton-Jacoby form. In this paper, we have considered information forces that turn the corresponding Liouville equation into the Fokker-Planck equation which is parabolic, and therefore, all the changes of the probability density propagates instantaneously as in the quantum systems. Thus, both quantum systems and liv- ing systems possess the same non-locality: instantaneous propagation of changes in the probability density, and this is due to similar topology of their dynamical struc- ture, and in particular, due to a feedback from the Liou- ville equation. 2.4. Origin of Randomness in Physics Since entanglement in quantum systems as well as in living systems is exposed via instantaneous propagation of changes in the probability density, it is relevant to ask what is the origin of randomness in physics. The concept of randomness has a long history. Its philosophical as- pects first were raised by Aristotle, while the math- ematic- cal foundations were introduced and discussed much later by Henry Poincare who wrote: “A very slight cause, which escapes us, determines a considerable effect which we cannot help seeing, and then we say this effect is due to chance.” Actually Poincare suggested that the origin of randomness in physics is the dynamical insta- bility, and this viewpoint has been corroborated by the- ory of turbulence and chaos. However, the theory of dy- namical stability developed by Poincare and Lyapunov revealed the main flaw of physics: its fundamental laws do not discriminate between stable and unstable motions. But unstable motions cannot be realized and observed, and therefore, a special mathematical analysis must be added to found out the existence and observability of the motion under consideration. However, then another ques- tion can be raised: why turbulence as a postinstability version of an underlying laminar flow can be observed and measured? In order to answer this question, we have to notice that the concept of stability is an attribute of mathematics rather than physics, and in mathematical formalism, stability must be referred to the correspond- ing class of functions. For example: a laminar motion with sub-critical Reynolds number is stable in the class of deterministic functions. Similarly, a turbulent motion is stable in the class of random functions. Thus the same physical phenomenon can be unstable in one class of functions, but stable in another, enlarged class of func- tions. Thus, we are ready now to the following conclusion: any stochastic process in Newtonian dynamics describes the physical phenomenon that is unstable in the class of the deterministic functions. This elegant union of physics and mathematics has been disturbed by the discovery of quantum mechanics that complicated the situation: Quantum physicists claim that quantum randomness is the “true” randomness unlike the “deterministic” randomness of chaos and turbulence. Richard Feynman in his “Lectures on Physics” stated that randomness in quantum mechanics in postulated, and that closes any discussions about its origin. However, recent result disproved existence of the “true” random- ness. Indeed, as shown in [2], the origin of randomness in quantum mechanics can be traced down to instability generated by quantum potential at the point of departure from a deterministic state if for dynamical analysis one transfer from the Shrodinger to the Madelung equation. (For details see [2]). As demonstrated there, the instabil- ity triggered by failure of the Lipchitz condition splits the solution into a continuous set of random samples repre- senting a “bridge” to quantum world. Hence, now we can state that any stochastic process in physics describes the physical phenomenon that is unstable in the class of the deterministic functions. Actually this statement can be used as a definition of randomness in physics. Finally one may ask why the instability discussed above has not been detected in the Schrödinger equation. The answer is simple if one recalls that stability analysis is based upon a departure from the basic state into a perturbed state, and such departure requires an expansion of the basic space. However, Schrödinger and Madelung equations in the expanded spaces are not necessarily equivalent any more, and that confirm the fact that stability is not an invariant of a dynamical system: it can depend upon the definition of a distance between the basic and perturbed Copyright © 2012 SciRes. JQIS  M. ZAK 73 motions, and these definitions are different for Hilbert and physical spaces. 3. Partial Entanglement in Livings In this section we introduce a new, more sophisticated entanglement that does not exists in quantum mechanics, but can be found in Livings. This finding is based upon existence of incompatible stochastic processes that are considered below. 3.1. Incompatible Stochastic Processes Classical probability theory defines conditional proba- bility densities based upon the existence of a joint prob- ability density. However, one can construct correlated stochastic processes that are represented only by condi- tional densities since a joint probability density does not exist. For that purpose, consider two coupled Langevin equations [6]. 11121 gxLt (25) 22212 gxLt (26) where the Langevin forces 1 Ltand satisfy the conditions 2 Lt 0, 2 iiiii LtLtLtgt t (27) Then the joint probability density 12 , X de- scribing uncertainties in values of the random variables 1 and 2 evolves according to the following Fokker- Planck equation 22 22 112221 22 12 gXg X t X (28) Let us now modify Equations (25) and (26) as follow- ing 2* 11121 gxLt (29) 2* 22212 gxLt (30) where * 1 and 2 * are fixed values of 1 and 2 that play role of parameters in Equations (29) and (30), re- spectively. Now the uncertainties of 1 and 2 are char- acterized by conditional probability densities 11 |2 X and 1 | 22 X while each of these densities is gov- erned by its own Fokker-Planck equation 2 2 1 11 22 1 gX t 1 (31) 2 2 2 22 1 2 gX tX 2 (32) The solutions of these equations subject to sharp initial conditions ,, ,1,2. (33) iiii i XtXtXXi for tt read 11 22 11 2 2 11 2 11 2 1 | 4π exp(4 XX gXtt XX Xtt (34) 2212 22 1 2 22 2 22 1 1 4π exp4 XX gXtt XX Xtt (35) As shown in [3], a joint density for the conditional densities (34) and (35) exists only in special cases of the diffusion coefficients g11 and g22 when the conditional probabilities are compatible. These conditions are 11 2 12 122 2 1 | ,ln | XX ink XXX X 0 (36) Indeed 121 122 212 1 ,, ,d, XX XXX XX X d (37) whence 112 1 221 2 lnln, d ln,d XX X XX X (38) and that leads to Equation (36). Thus, the existence of the join density 12 , X for the conditional densities 112 X and 221 X requires that 2 2112 2 22 12 11 2221 0 44 XXXX XX gXg X (39) Obviously the identity (39) holds only for specially selected functions 11 2 X and 22 1 X, and there- fore, existence of the joint density is an exception rather than a rule. 3.2. Partial Entanglement In order to prove existence of a new form of entangle- ment, let us modify the system Equations (10)-(12) as Copyright © 2012 SciRes. JQIS  M. ZAK 74 following: 1112 112 1 lnvav vv v (40) 2 112 112 11 22 1 VV VV aV tV (41) 2221 22 1 lnvav vv v 1 (42) 2 221 221 22 12 2 VV VV aV tV (43) Since here we do not postulate existence of a joint density, the system is written in terms of conditional densities, while Equations (41) and (43) are similar to Equations (31) and (32). The solutions of these PDE can be written in the form similar to the solutions (34) and (35) 112 11 2 2 11 11 2 1 4π exp4 VV aV tt VV aV tt (44) 221 22 1 2 22 11 1 1 4π exp4 VV aVtt VV aV tt (45) As noticed in the previous sub-section, the existence of the joint density for the conditional densities 12 ,VV 112 VV and 221 VV requires that 2 2112 2 12 112221 0 44 VVVV VVa VaV (46) In this case, the joint density exists (although its find- ing is not trivial [3]), and the system (40)-(43) can be reduced to a system similar to (10)-(12). But here we will be interested in case when the joint density does not exist. It is much easier to find such functions 11 222 1 ,aVaV for which the identity (46) does not hold, and we assume that 2 2112 2 12 112221 0 44 VVVV VVa VaV (47) In this case the system (40)-(43) cannot be simplified. In order to analyze this system in details, let substitute the solutions (44) and (45) into Equations (40) and (42), respectively. Then with reference to Equation (6), one obtains 1 12 v vt (48) 2 22 v vt (49) and therefore 11 vCt (50) 22 vCt (51) It should be recalled that according to the terminology introduced in Section I, the system (40)-(41) and the sys- tem (42)-(43) can be considered as dynamical models for interaction of two communicating agents where Equa- tions (40) and (42) describes their motor dynamics, and Equations (41) and (43)—mental dynamics, respectively. Also it should be reminded that the solutions (50) and (51) are represented by one-parametrical families of random samples, as in Equation (7), while the random ness enters through the time-independent parameters 1 and 2 that can take any real numbers. As follows from Figure 2, all the particular solutions (50) and (51) inter- sect at the same point 1,2 C C 0v at t = 0, and that leads to non-uniqueness of the solution due to violation of the Lipcshitz condition. Therefore, the same initial condition 1,20v at t = 0 yields infinite number of different solu- tions forming a family; each solution of this family ap- pears with a certain probability guided by the corre- sponding Fokker-Planck Equations (41) and (43), respec- tively. Similar scenario was described in the Introduction of this paper. But what unusual in the system (40)-(43) is correlations: although Equations (41) and (43) are corre- lated, and therefore, mental dynamics are entangled, Equations (40) and (42) are not correlated (since they can be presented in the form of independent Equations (48) and (49), respectively), and therefore, the motor dynam- ics are not entangled. This means that in the course of communications, each agent “selects” a certain pattern of behavior from the family of solutions (50) and (51) re- spectively, and these patterns are independent; but the probabilities of these “selections” are entangled via Equations (41) and (43). Such sophisticated correlations cannot be found in physical world, and they obviously represent a “human touch”. Unlike the entanglement in system with joint density (such as that in Equations (10)-(12)) here the agents do not share any deterministic invariants (compare to Equation (22)). Instead the agents can communicate via “best guesses” based upon known probability densities distributions. In order to quantify the amount of uncertainty due to Copyright © 2012 SciRes. JQIS  M. ZAK 75 incompatibility of the conditional probability densities (44) and (45), let us introduce a concept of complex probability [3]. 12 1212 ,, , VVaVV ibVV (52) 1112 212 2 11 11 ()(, )d(, )d ()() VaVVVibVV aV ibV V (53) 22121121 22 22 ()(, )d(, )d ()() VaVVVibVV aV ibV V (54) Following the formalism of conditional probabilities, the conditional density will be defined as 1212 12 1| 2 2222 22 22 22 22 22 22 22 (, )(,)(, ) ()() () VVaVVibVV ffVaV ibV aabbabab i ab ab (55) 1212 12 2|1 1111 11 11 11 2222 112 2 (, )(,)(, ) ()() () VVaVVibVV ffVaVibV aabbabab i aba b (56) with the normalization constraint 12 22 12 dd 1ab VV (57) This constraint can be enforced by introducing a nor- malizing multiplier in Equation (52) which will not affect the conditional densities (55) and (56). Clearly 12 22,aab and (58) 12 dd 1aV V Now our problem can be reformulated in the following manner: given two conditional probability densities (44) and (45), and considering them as real parts of (unknown) complex densities (55) and (56), find the corresponding complex joint density (52), and therefore, all the mar- ginal (53) and (54), as well as the imaginary parts of the conditional densities. In this case one arrives at two cou- pled integral equations with respect to two unknowns and (while the formulations of ,212 , and follow from Equations (53) and (54)). These equations are 12 ,aVV 112 ,aVV 12 ,bVV ,VaV 112 ,bVV 212 ,bVV 22 11 112 212 22 22 22 22 ,,, aabbaa bb VV VV ab ab , (59) The system (59) is nonlinear, and very little can be said about general property of its solution without de- tailed analysis. Omitting such an analysis, let us start with a trivial case when b = 0 (60) In this case the system (59) reduces to the following two integral equations with respect to one unknown 12 ,aVV 12 112 12 2 12 212 12 2 , ,, ,d , , ,d aVV VV aVV V aVV VV aVV V (61) This system is overdetermined unless the compatibility conditions (36) are satisfied. As known from classical mechanics, the incompatibil- ity conditions are usually associated with a fundamen- tally new concept or a physical phenomenon. For in- stance, incompatibility of velocities in fluid (caused by non-existence of velocity potential) introduces vorticity in rotational flows, and incompatibility in strains de- scribes continua with dislocations. In order to interpret the incompatibility (36), let us return to the system (59). Discretizing the functions in Equations (59) and replac- ing the integrals by the corresponding sums, one reduces Equations (59) to a system of n algebraic equations with respect to n unknowns. This means that the system is closed, and cases when a solution does not exist are ex- ceptions rather than a rule. Therefore, in most cases, for any arbitrarily chosen conditional densities, for instant, for those given by Equations (44) and (45), the system (59) defines the complex joint density in the form (52). Now we are ready to discuss a physical meaning of the imaginary component of the complex probability density. Firstly, as follows from comparison of Equations (59) and (61), the imaginary part of the probability density appears as a response to incompatibility of the condi- tional probabilities, and therefore, it can be considered as a “compensation” for the incompatibility. Secondly, as follows from the inequalities (58), the imaginary part consumes a portion of the “probability mass” increasing thereby the degree of uncertainty in the real part of the complex probability density. Hence the imaginary part of the probability density can be defined as a measure of the uncertainty “inflicted” by the incompatibility into the real part of this density. In order to avoid solving the system of integral equa- tions (59), we can reformulate the problem in an inverse fashion by assuming that the complex joint density is given. Then the real parts of the conditional probabilities that drive Equations (40) and (41) can be found from simple formulas (55) and (56). Copyright © 2012 SciRes. JQIS  M. ZAK 76 Let us illustrate this new paradigm, and consider two players (for instance, in a poker-like game), assuming that each player knows his own state as well as the com- plex joint probability density, 12 1212 ,,VVaVV ibVV , 0 (62) But he does not know the state of his adversary. Without going in details of the game, let us draw a sketch of a common-sense-based logic that could be ap- plied by the players. Since the player 1 knows the joint probability density (62) and he also knows the value of his own state variable * 11 Vvattt (63) He can find the state variable of the player 2 at 0 tt as a function of the real part of the probability density at the fixed value (63) of its own state variable 1 21 VFa at (64) * 11 ,Vvtt 0 where 21 is the value of the state variable of the second player in view of the first player. Now the question is: what is the best guess of the player 1 about the next move of the player 2 at 0? The simple logic sug- gests that it is the move that maximizes the real part of the joint density, i.e. the value is to be found from the following condition V tt * 21 21 Vv * 12(1)2(1)1 1 aVvSup FFa (65) Obviously the player 2 has the same dilemma, and his choice could be * 22(1) 2(1)2 aVvSup Fa (66) However both players rely only upon the real part of the complex joint density instead of a real joint density (that does not exist in this case). But as follows from the inequalities (58), the values of density of the real part are lowered due to loss of the probability mass, and this in- creases the amount of uncertainty in player’s predictions. In order to minimize that limitation, the players can in- voke the imaginary part of the joint density that gives them qualitative information about the amount of uncer- tainty at the selected maxima. This information could give a reason to reconsider the previous decision and move away from the maxima at which uncertainty of the density is large. Thus the game starts with a significant amount of un- certainties that will grow exponentially with next moves. Such subtle and sophisticated relationship is typical for communications between humans, and the proposed model captures it via partial entanglement introduced above. 4. Conclusions In this paper, a novel approach to the concept of entan- glement and its application to communications in Livings is introduced and discussed. The paper combines several departures from classical methods in physics and in probability theory. Firstly, it introduces a non-linear version of the Liou- ville equation that is coupled with the equation of motion (in Newtonian dynamics they are uncoupled). This new dynamical architecture grew up from quantum physics (in the Madelung version) when the quantum potential was replaced by information forces. The advantage of this replacement for modeling communications between intelligent agents representing living systems is ad- dressed and discussed. Secondly, it exploits a paradigm coming from incom- patible conditional probabilities that leads to non-exis- tence of a joint probability (in classical probability theory, existence of a joint probability is postulated). That led to discovery of a new type of entanglement that correlates not actions of Livings, but rather the probability of these actions. Thirdly, it introduces a concept of imaginary probabil- ity as a measure of uncertainty generated by incompati- bility of conditional probabilities. All of these departures actually extend and comple- ment the classical methods making them especially suc- cessful in analysis of communications in Living repre- sented by new mathematical formalism. Thus this paper discusses quantum-inspired models of Livings from the viewpoint of information processing. The model of Livings consists of motor dynamics simu- lating actual behavior of the object, and mental dynamics representing evolution of the corresponding knowl- edge-base and incorporating it in the form of information flows into the motor dynamics. Due to feedback from mental dynamics, the motor dynamics attains quantum- like properties: its trajectory splits into a family of dif- ferent trajectories, and each of those trajectories can be chosen with the probability prescribed by the mental dy- namics The paper concentrates on discovery of a new type of entanglement that correlates not actions of Liv- ings, but rather the probability of these actions. REFERENCES [1] M. Zak, “Physics of Life from First Principles,” Elec- tronic Journal of Theoretical Physics, Vol. 4, No. 16(II) 2007, pp. 11-96. [2] M. Zak, “From Quantum Computing to Intelligence,” Nova Science Publishers, New York, 2011. [3] M. Zak, “Incompatible Stochastic Processes and Complex Probabilities,” Physics Letters A, Vol. 238, No. 1, 1998, pp. 1-7. doi:10.1016/S0375-9601(97)00763-9 Copyright © 2012 SciRes. JQIS  M. ZAK Copyright © 2012 SciRes. JQIS 77 [4] M. Zak, “Entanglement of Memories and Reality in Models of Livings,” Electronic Journal of Theoretical Physics, 2012 (in press). [5] L. Landau and E. Lifshitz, “Quantum Mechanics,” Nauka, Moscow, 1997. [6] H. Risken, “The Fokker-Planck Equation,” Springer-Ver- lag, New York, 1989. [7] H. Berg, “Random Walk in Biology,” Prinston University Press, Princeton, 1983.
|