 Open Journal of Statistics, 2012, 2, 319-327 http://dx.doi.org/10.4236/ojs.2012.23040 Published Online July 2012 (http://www.SciRP.org/journal/ojs) A New Method of Construction of Robust Second Order Slope Rotatable Designs Using Pairwise Balanced Designs Bejjam Re. Victorbabu, Kottapalli Rajyalakshmi Department of Statistics, Acharya Nagarjuna University, Guntur, India Email: victorsugnanam@yahoo.co.in, Rajyalakshmi_kottapalli@yahoo.com Received May 10, 2012; revised June 12, 2012; accepted June 28, 2012 ABSTRACT In this paper, a new method of construction of robust second order slope rotatable designs (RSOSRD) using pairwise balanced designs (PBD) is suggested and also obtained the variance of the estimated derivatives for the factors 6 ≤ v ≤ 15. It is shown that the new method sometimes leads to designs with less number of design points compared to designs constructed with the help of balanced incomplete block designs (BIBD). Keywords: Response Surface Designs; Slope Rotatability; Correlated Errors; Robustness; Second Order Slope Rotatable Designs (SOSRD) 1. Introduction In response surface methodology, rotatability is a natural and highly desirable property. This was introduced and developed by Box and Hunter [1] assuming the errors to be uncorrelated and homoscedastic. Das and Narasim- ham [2] constructed second order rotatable designs (SORD) through balanced incomplete block designs (BIBD). Tyagi [3] constructed SORD using pairwise balanced designs (PBD). Panda and Das [4] studied first order rotatable designs with correlated errors. In order to study the na- ture of robust rotatable designs, rotatability conditions for second order regression designs have been derived, assuming the errors to be correlated. These conditions have been further studied under different variance co- variance structures of errors. Das [5,6] introduced robust second order rotatable designs (RSORD). Rajyalakshmi and Victorbabu [7] constructed robust rotatable central composite designs (RRCCD) for factors 2 ≤ v ≤ 17. Vic- torbabu and Rajyalakshmi [8] constructed a new method of construction of robust second order rotatable designs using BIBD. Victorbabu and Rajyalakshmi [9] studied a new method of construction of robust second order ro- tatable designs using PBD. In response surface methodology, good estimators of the derivatives of the response function may be as im- portant or perhaps more important than estimation of mean response. Estimation of differences in responses at two different points in the factor space will often be of great impor- tance. If a difference in responses at two points close together is of interest then estimation of local slope (rate of change) of the response is required. Estimation of slopes occurs frequently in practical situations. For in- stance, there are cases in which we want to estimate rate of reaction in chemical experiment, rate of change in the yield of a crop to various fertilizer doses, rate of disinte- gration of radioactive material in animal etc. [9]. Murty and Studden [10] suggested optimal designs for estimating the slope of a polynomial regression. Hader and Park [11] introduced slope rotatable central compos- ite designs assuming errors are uncorrelated and homo- scedastic. Park [9] studied a class of multifactor designs for estimating the slope of response surfaces. Victorbabu and Narasimham [12] constructed second order slope rotatable designs (SOSRD) using BIBD assuming errors are uncorrelated and homoscedastic. Victorbabu and Na- rasimham [13] constructed SOSRD using PBD. Several authors have studied slope rotatable designs assuming errors to be uncorrelated and homoscedastic. However it is not uncommon to come across some practical situa- tions when the errors are correlated, violating the usual assumptions. Specifically Das [14] introduced the con- cept of slope rotatability with correlated errors, which requires that the variance of the estimated derivative to be constant, independent of correlation parameter in- volved in the variance-covariance structure of errors. They have studied slope rotatability conditions for a second order design with correlated errors. Victorbabu and Rajyalakshmi [15] studied robust slope rotatable central composite designs (RSRCCD) for the factors 2 ≤ v ≤ 8. Further, Victorbabu and Rajyalakshmi [16] studied robust slope rotatable designs (RSOSRD) using BIBD for the factors 3 ≤ v ≤ 8. In this paper, an attempt is made to construct RSO- C opyright © 2012 SciRes. OJS  B. RE. VICTORBABU, K. RAJYALAKSHMI 320 SRD using PBD and also obtained the variance of the estimated derivatives for factors 6 ≤ v ≤ 15. 2. Second Order Response Surface Designs with Correlated Errors Assuming that the response surface is of second order, we adopt the model: 2 0 11 vv ui iuii iu ii Yxx 1 v ij iujuu ij xxe ,, , (2.1) where xiu denotes the level of the ith factor (i = 1,2, ···, v) in the uth run (u = 1,2, ···, N) of the experiment, eu’s are correlated errors. Here 0iiiij are the parameters of the model and is the observed response at the uth design point. u Y Second Order Slope Rotatable Designs with Correlated Errors Following Hader and Park [11], Victorbabu and Nara- simham [12], Das [14], the necessary and sufficient con- ditions for slope rotatability in second order model with correlated errors are as follows: Conditions for Second Order Slope Rotatable Designs with Correlated Errors. The estimated response at x is given by 2 0 11 ˆˆ ˆ ˆ vv 1 ˆ v ii ii ii iji j ij xxx y (2.2) For the second order model as in (2.2), we have 1; 1 ˆ v ij ijj jj ˆˆˆ 2 x ii i i x x yx (2.3) The variance of ˆ i y is given by, The variance of estimated first order derivative with respect to each independent variable xi as in (2.4) to be a 2 2 1;1 1; 1; 1; .2. . 2. 1; 44 2, 4 ˆˆˆ ˆ ˆ ˆˆ ˆˆ ˆ , 44 x i iii ii i vv , , ˆ ˆˆ ii ijj s jjijs jsi v jiij jji v i jiiij jji i iii iii ii x ii i ij ij j jj VVxVxCo x xV xx xCov xxCov Vvxvxv x v y x y ij is v Cov is j 1 22 v iu i . 11 .. 1; 1; 24 vv ij js ijsjsi vv iij iiij ji jji jji xxv xv xxv (2.4) d function of if and only if, .. 0;1,0; iii iij vivv 1) 1, ,ij vij .0;1 , ij ij vijjv 2) .0;1 ,, ii ij vijvij .constant;1 , ii viv 3) .constant;1 , ii ii viv 4) .constant 1,and ij ij vijv 5) 6) .. 1;1 . 4 ii iiij ij vvijv 0.0. 0; 1 jjl jvv v (2.5) The following are the equivalent conditions of (1) through (5) in (2.5) for slope rotatability in secondorre- lated errors model (2.1). 1)*: a) .0 ij v ; ; 1≤ i, j ≤ v, i ≠ j; b) .0 ii j v ; 1 ≤ i, j ≤ v; c): i) .0 ijl v ; 1 ≤ i, j < l ≤ v; ii) .. 0 ii jl v ; 1 ≤ i, j < l ≤ v, ,,jl ii .. 0 ii jl v ; iii) ; iv) 1,, ,,,iljtvi jlt 0. ; 2)*: a) j v0 a .ii v = constant = , say; 1 ≤ j ≤ v; b) = constant = 1 e .ii ii v , say; 1 ≤ i ≤ v; c) = constant = 2 g .ii jj v .ij ij , say; 1 ≤ i ≤ v; 3)*: a) = constant = f; 1 ≤ i ≠ j ≤ v; b) v = constant = 1; 1 ≤ i < j ≤ v. (2.6) Following (2.6), the necessary and sufficient condi- tions for second order slope rotatability under the intra- class structure after some simplifications turn out to be 3 124 1234 1 0; N iu iuiu iu u xxxx 1)*: 4 1 i i for any αi odd and ≤ 4. 2 1 constant,1 N iu u iv 2)*: a) 4 1 constant ,1 N iu u ; iv b) 22 1 constant,, 1,; N iu ju u ; xijvij 3)* 2 2 1 ,1 N iu u (2.7) Using Niv 22 4 1 , N iu ju u xx N and Copyright © 2012 SciRes. OJS  B. RE. VICTORBABU, K. RAJYALAKSHMI es. OJS 321 1, ,ij vij , the second order slope rotatable design parameters under the intra-class structure are as follows: Copyright © 2012 SciR 1) 2 11 N N 02 a ; 2) 22 42 1 N N 2 11 11 NN f ; 3) 2 2 1 1 N e ; 4) 4 2 1 1 N g ; 5) 00211 N vN ; 6) 22 42 2 113 11 1 NNN gN 2f 3 124 1234 1 0; N iu iuiu iu u xxxx 4 1 i i . (2.8) Note that if ρ = 0, the conditions (2.7) and (2.8) re- duces to 1): for any αi odd and ≤ 4. 2): a) 2 2 1 constant ,1 iu u ; N Niv 4,1 b) 4 1 constant N iu u cNi v 41 ,,, ; 3) 22 1 constant N iu ju u xN ijvij (2.9) where c = 3η, and 4 , 2 , η are constants. The variances and covariances of the estimated pa- rameters of the model (2.1) under the slope rotatability are as follows: 1) 0T 2 ˆ 1 ;1 fvf g Viv ;1 ˆ; i Veiv ;1 ˆ;Vgijv ; 2) 3) ij 4) 2 00 0 221 , 2 ˆii vfvfva g V Tff g 1;iv 5) 0 0,;; ˆ1 ˆii a Covi v T 6) 2 000 ,; 2 ˆˆ1 ii jj afv Covij v Tff g (2.10) where 2 00 0 21Tvfv fva g ˆ and other covariance’s are zero. An inspection of the variance of 0 shows that a necessary condition for the existence of a non-singular second order design is T > 0 i.e., 4)*: 2 00 0 210vfvfva g (2.11) Using (2.8), the expression 2 00 0 21vfvfva g simplified to 4 2 2 22 2 22 (1)1( 1) 11 (1) Ncv NN N vNvN Hence the non-singularity condition is 4 22 2 22 111 (1)0 cv NN vNvN (2.12) For any general second order slope rotatable designs (c.f. Hader and Park [11]), we have .. ˆˆ.., 11 44 ii iiij ij ii ij VVievv (2.13) On simplification of (2.13), using (2.10), we get 5)*: 2 0000000 0000 22 41421 2 0410. vevfgv fvgvav fgv fvvfg gg av vfg (2.14) Using (2.8), the condition (2.14) simplifies to  B. RE. VICTORBABU, K. RAJYALAKSHMI 322 22 42 22 2 42 2 44 22 22 42 42 4 22 2 113 1 113 11 1 42 11 11 11 11 421 111 11 41 NNN NNN N N Nvv NN NNNNNNN vv NN NN Nvv 22 42 4 11 NN N 22 42 4 0 11 N NN (2.15) For ρ = 0, Equation (2.15) reduces to (see Victorbabu and Narasimham [12]) 22 4 5(3)vcc 2 54=0vc (2.16) On simplification of Equation (2.4) using Equation (2.6) and (2.13), we get 22 1; 22 v ij jj i i xg x egd 2tk 2k tk 2tk 22 tk bvn 1 44 ˆx i v i g Vex x eg y (2.17) 3. New Method of Construction of RSOSRD Using Pairwise Balanced Designs Let there be an equi-replicated PBD with parameters (v, b, r, k1, k2, ···, kp, λ) and k = sup (k1, k2, ···, kp), de- note a fractional replicate of in ± levels, in which no interaction with less than five factors is confounded. [1-(v, b, r, k1, k2, ···, kp, λ)] denote the design points gen- erated from the transpose of incidence matrix of PBD. [1-(v, b, r, k1, k2, ···, kp, λ)] are the b design points generated from PBD (c.f. Raghavarao [17], pp. 298-300)), n0 denote the number of central points and (±α, 0, 0, ···, 0) 21 denote the design points generated from (±α, 0, 0, ···, 0) point set. 2 Here we start with usual SOSRD using PBD having “n” (where n = b + 2v) non-central design points involving v-factors. For this n-non-central design points we add (n + 1) (n + n0 = m say) central points in the fol- lowing way. One central point is placed in between each pair of non-central design points in the sequence, resulting thereby in (n − 1) such central points. The other two cen- tral points are placed one at the beginning and one at the end. If the number of central points of the usual SOSRD with which we started is greater than (n + 1), the remain- ing central points are placed in any manner, if the num- ber is less, we need to include the requisite number of additional central points. Here we examine the non-sin- gularity condition for the newly constructed design. Let N (N = 0 2tk 2tk 2tk 22 tk Nb vm 2 ) be the number of design points of an SOSRD using PBD with which we started. Out of N, let n be the number of non-central design points and n0 be the number of central points. i.e., N = n + n0. Let N1 be the number of design points of the newly constructed RSOSRD using PBD, where N1 = n + m > N. For the SOSRD using PBD with which we started, the following are the moment relations: Theorem (3.1): If (v, b, r, k1, k2, ···, kp, λ) is an equi-replicate PB de- sign and k = sup (k1, k2, ···, kp) denotes a resolution V fractional replicate of of 2k in ± levels and n0 is the number of central points, then the design points, [1-(v, b, r, k1, k2, ···, kp, λ)] U (α, 0, 0, ···, 0) U(m) give a v-dimensional RSOSRD in 1 (where m = n + n0) design points, where is a posi- tive real root (if it exists) of the biquadratic equation, 2 82 1 4 1 2 22 2 22 1 3 2 8482 22 12 24162042 416202 59 62 452 0. tk tk tk tk tk tk vN vrvr vrN vvr vrvv r vvrrN vrv r 2 (3.1) If at least one positive real root of exists in (3.1) then the design exists. c can be obtained from 4 22 2 tk tv r c 122 12 1 2 2constant, Ntk iu u xr N . (3.2) Proof: For the design points generated from the PBD, simple symmetry conditions 1), 2), 2 of (2.7) are true. Condition 1) of (2.7) is true obviously. Conditions 2) and 3) of (2.7) are true as follows. 2) a) Copyright © 2012 SciRes. OJS  B. RE. VICTORBABU, K. RAJYALAKSHMI 323 1;iv 14 tant ,cN b) 144 1 2 2cons Ntk iu u xr 1;iv 14 onstant ,N 3) 122 1 2c Ntk iu ju u xx 1ij v , (3.3) From 2) b) and 3) of (3.3), we get c given in (3.2). Substituting for 24 2 and c in (2.16), and on simplifi- cation we get the fourth degree equation in given in (3.1) Corollary: If k1 = k2 = ··· = kp = k, then Theorem 3.1 reduces to the method of construction of RSOSRD using BIBD. The RSOSRD using pairwise balanced designs values “α” and the variances of estimated slopes for the factors 6 ≤ v ≤ 15 are given in Appendix. Example: We illustrate the use of Theorem 3.1 by constructing a RSOSRD for 6-factors with the help of the PB design (v = 6, b = 7, r = 3, k1 = 3, k2 = 2, λ = 1). [1-(6, 7, 3, 3, 2, 1)] × 23 U (α, 0, 0, ···, 0) × 21 U(m = 69) will give a RSOSRD in N1 = 137 design points for six factors. From (3.3), we have 2) a) 122 1 24 2 N iu u 12 ,1 ; Niv 14 ,1 ; b) 144 1 24 2 N iu u cN i v 1 ; 3) 122 14 1 8, N iu ju u xN ijv , (3.4) Substituting for 24 2 68352 0 and c in (2.16), we get the fol- lowing biquadratic equation. 86 4 500 115264966144 . (3.5) (3.5) has only one positive real root α2 = 2.7093. It may be pointed out here that this RSOSRD using PBD has only 137 design points for 6-factors, where as the corresponding RSOSRD obtained using a BIB design (v = 6, b = 10, r = 5, k = 3, λ = 2) needs 185 design points. Thus the new method sometimes leads to RSO-SRD us- ing PBD with lesser number of design points than the RSOSRD obtained through BIB designs. The Appendix gives the appropriate robust slope rota- tability values of the parameter “α” for designs using a PBD, star points and for different number of central points and also variances and covariances of the factors for 6 ≤ v ≤ 15. 4. Acknowledgements The authors are thankful to the referee and the editor for the valuable suggestions which helped in improving the quality of the paper. REFERENCES [1] G. E. P. Box and J. S. Hunter, “Multifactor Experimental Designs for Exploring Response Surfaces,” The Annals of Mathematical Statistics, Vol. 28, No. 1, 1957, pp. 195- 241. doi:10.1214/aoms/1177707047 [2] M. N. Das and V. L. Narasimham, “Construction of Ro- tatable Designs through Balanced Incomplete Block De- signs,” Annals of Mathematical Statistics, Vol. 33, No. 4, 1962, pp. 1421-1439. [3] B. N. Tyagi, “On the Construction of Second Order and Third Order Rotatable Designs through Pairwise Bal- anced Designs and Doubly Balanced Designs,” Calcutta Statistical Association Bulletin, Vol. 13, 1964, pp. 150- 162. [4] R. N. Panda and R. N. Das, “First Order Rotatable De- signs with Correlated Errors,” Calcutta Statistical Asso- ciation Bulletin, Vol. 44, 1994, pp. 83-101. [5] R. N. Das, “Robust Second Order Rotatable Designs. Part- I RSORD,” Calcutta Statistical Association Bulletin, Vol. 47, 1997, pp. 199-214. [6] R. N. Das, “Robust Second Order Rotatable Designs. Part- II RSORD,” Calcutta Statistical Association Bulletin, Vol. 49, 1999, pp. 65-76. [7] K. Rajyalakshmi and B. Re. Victorbabu, “Robust Second Order Rotatable Central Composite Designs,” JP Journal of Fundamental and Applied Statistics, Vol. 1, No. 2, 2011, pp. 85-102. [8] B. Re. Victorbabu and K. Rajyalakshmi, “A New Method of Construction of Robust Second Order Rotatable De- signs Using Balanced Incomplete Block Designs,” Open Journal of Statistics, Vol. 2, No. 1, 2012, pp. 39-47. [9] S. H. Park, “A Class of Multifactor Designs for Estimat- ing the Slope of Response Surfaces,” Technometrics, Vol. 29, No. 4, 1987, pp. 449-453. [10] V. N. Murty and W. J. Studden, “Optimal Designs for Estimating the Slope of a Polynomial Regression,” Jour- nal of the American Statistical Association, Vol. 67, No. 340, 1972, pp. 869-873. [11] R. J. Hader and S. H. Park, “Slope-Rotatable Central Com- posite Designs,” Technometrics, Vol. 20, No. 4, 1978, pp. 413-417. [12] B. Re. Victorbabu and V. L. Narasimham, “Construction of Second Order Slope Rotatable Designs through Bal- anced Incomplete Block Designs,” Communications in Statistics—Theory and Methods, Vol. 20, No. 8, 1991, pp. 2467-2478. doi:10.1080/03610929108830644 [13] B. Re. Victorbabu and V. L. Narasimham, “Construction of Second Order Slope Rotatable Designs Using Pairwise Balanced Designs,” Journal of the Indian Society of Ag- ricultural Statistics, Vol. 45, No. 2, 1993, pp. 200-205. [14] R. N. Das, “Slope Rotatability with Correlated Errors,” Calcutta Statistical Association Bulletin, Vol. 54, 2003, pp. 57-70. Copyright © 2012 SciRes. OJS  B. RE. VICTORBABU, K. RAJYALAKSHMI Copyright © 2012 SciRes. OJS 324 [15] B. Re. Victorbabu and K. Rajyalakshmi, “Robust Slope Rotatable Central Composite Designs,” Paper Submitted for the Possible Publication, 2012. [16] B. Re. Victorbabu and K. Rajyalakshmi, “Robust Second Order Slope Rotatable Designs Using Balanced Incom- plete Block Designs,” Paper Submitted for the Possible Publication, 2012. [17] D. Raghavarao, “Constructions and Combinatorial Prob- lems in Design of Experiments,” John Wiley and Sons, New York, 1971. 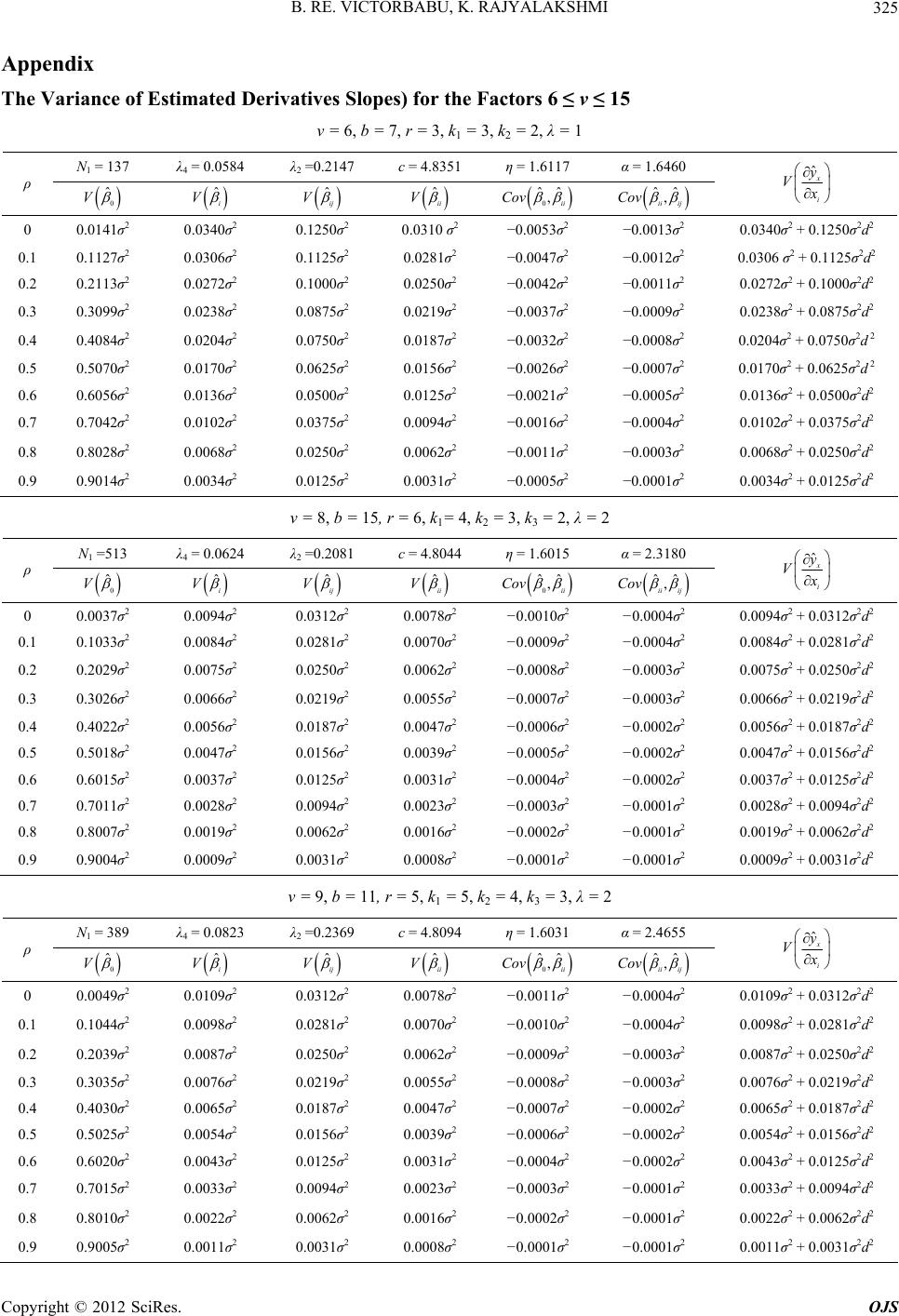 B. RE. VICTORBABU, K. RAJYALAKSHMI 325 Appendix The Variance of Estimated Derivatives Slopes) for the Factors 6 ≤ v ≤ 15 v = 6, b = 7, r = 3, k1 = 3, k2 = 2, λ = 1 N1 = 137 λ4 = 0.0584 λ2 =0.2147 c = 4.8351 η = 1.6117 α = 1.6460 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0141σ2 0.0340σ2 0.1250σ2 0.0310 σ2 −0.0053σ2 −0.0013σ2 0.0340σ2 + 0.1250σ2d2 0.1 0.1127σ2 0.0306σ2 0.1125σ2 0.0281σ2 −0.0047σ2 −0.0012σ2 0.0306 σ2 + 0.1125σ2d2 0.2 0.2113σ2 0.0272σ2 0.1000σ2 0.0250σ2 −0.0042σ2 −0.0011σ2 0.0272σ2 + 0.1000σ2d2 0.3 0.3099σ2 0.0238σ2 0.0875σ2 0.0219σ2 −0.0037σ2 −0.0009σ2 0.0238σ2 + 0.0875σ2d2 0.4 0.4084σ2 0.0204σ2 0.0750σ2 0.0187σ2 −0.0032σ2 −0.0008σ2 0.0204σ2 + 0.0750σ2d 2 0.5 0.5070σ2 0.0170σ2 0.0625σ2 0.0156σ2 −0.0026σ2 −0.0007σ2 0.0170σ2 + 0.0625σ2d 2 0.6 0.6056σ2 0.0136σ2 0.0500σ2 0.0125σ2 −0.0021σ2 −0.0005σ2 0.0136σ2 + 0.0500σ2d2 0.7 0.7042σ2 0.0102σ2 0.0375σ2 0.0094σ2 −0.0016σ2 −0.0004σ2 0.0102σ2 + 0.0375σ2d2 0.8 0.8028σ2 0.0068σ2 0.0250σ2 0.0062σ2 −0.0011σ2 −0.0003σ2 0.0068σ2 + 0.0250σ2d2 0.9 0.9014σ2 0.0034σ2 0.0125σ2 0.0031σ2 −0.0005σ2 −0.0001σ2 0.0034σ2 + 0.0125σ2d2 v = 8, b = 15, r = 6, k1= 4, k2 = 3, k3 = 2, λ = 2 N1 =513 λ4 = 0.0624 λ2 =0.2081 c = 4.8044 η = 1.6015 α = 2.3180 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0037σ2 0.0094σ2 0.0312σ2 0.0078σ2 −0.0010σ2 −0.0004σ2 0.0094σ2 + 0.0312σ2d2 0.1 0.1033σ2 0.0084σ2 0.0281σ2 0.0070σ2 −0.0009σ2 −0.0004σ2 0.0084σ2 + 0.0281σ2d2 0.2 0.2029σ2 0.0075σ2 0.0250σ2 0.0062σ2 −0.0008σ2 −0.0003σ2 0.0075σ2 + 0.0250σ2d2 0.3 0.3026σ2 0.0066σ2 0.0219σ2 0.0055σ2 −0.0007σ2 −0.0003σ2 0.0066σ2 + 0.0219σ2d2 0.4 0.4022σ2 0.0056σ2 0.0187σ2 0.0047σ2 −0.0006σ2 −0.0002σ2 0.0056σ2 + 0.0187σ2d2 0.5 0.5018σ2 0.0047σ2 0.0156σ2 0.0039σ2 −0.0005σ2 −0.0002σ2 0.0047σ2 + 0.0156σ2d2 0.6 0.6015σ2 0.0037σ2 0.0125σ2 0.0031σ2 −0.0004σ2 −0.0002σ2 0.0037σ2 + 0.0125σ2d2 0.7 0.7011σ2 0.0028σ2 0.0094σ2 0.0023σ2 −0.0003σ2 −0.0001σ2 0.0028σ2 + 0.0094σ2d2 0.8 0.8007σ2 0.0019σ2 0.0062σ2 0.0016σ2 −0.0002σ2 −0.0001σ2 0.0019σ2 + 0.0062σ2d2 0.9 0.9004σ2 0.0009σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0009σ2 + 0.0031σ2d2 v = 9, b = 11, r = 5, k1 = 5, k2 = 4, k3 = 3, λ = 2 N1 = 389 λ4 = 0.0823 λ2 =0.2369 c = 4.8094 η = 1.6031 α = 2.4655 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0049σ2 0.0109σ2 0.0312σ2 0.0078σ2 −0.0011σ2 −0.0004σ2 0.0109σ2 + 0.0312σ2d2 0.1 0.1044σ2 0.0098σ2 0.0281σ2 0.0070σ2 −0.0010σ2 −0.0004σ2 0.0098σ2 + 0.0281σ2d2 0.2 0.2039σ2 0.0087σ2 0.0250σ2 0.0062σ2 −0.0009σ2 −0.0003σ2 0.0087σ2 + 0.0250σ2d2 0.3 0.3035σ2 0.0076σ2 0.0219σ2 0.0055σ2 −0.0008σ2 −0.0003σ2 0.0076σ2 + 0.0219σ2d2 0.4 0.4030σ2 0.0065σ2 0.0187σ2 0.0047σ2 −0.0007σ2 −0.0002σ2 0.0065σ2 + 0.0187σ2d2 0.5 0.5025σ2 0.0054σ2 0.0156σ2 0.0039σ2 −0.0006σ2 −0.0002σ2 0.0054σ2 + 0.0156σ2d2 0.6 0.6020σ2 0.0043σ2 0.0125σ2 0.0031σ2 −0.0004σ2 −0.0002σ2 0.0043σ2 + 0.0125σ2d2 0.7 0.7015σ2 0.0033σ2 0.0094σ2 0.0023σ2 −0.0003σ2 −0.0001σ2 0.0033σ2 + 0.0094σ2d2 0.8 0.8010σ2 0.0022σ2 0.0062σ2 0.0016σ2 −0.0002σ2 −0.0001σ2 0.0022σ2 + 0.0062σ2d2 0.9 0.9005σ2 0.0011σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0011σ2 + 0.0031σ2d2 Copyright © 2012 SciRes. OJS 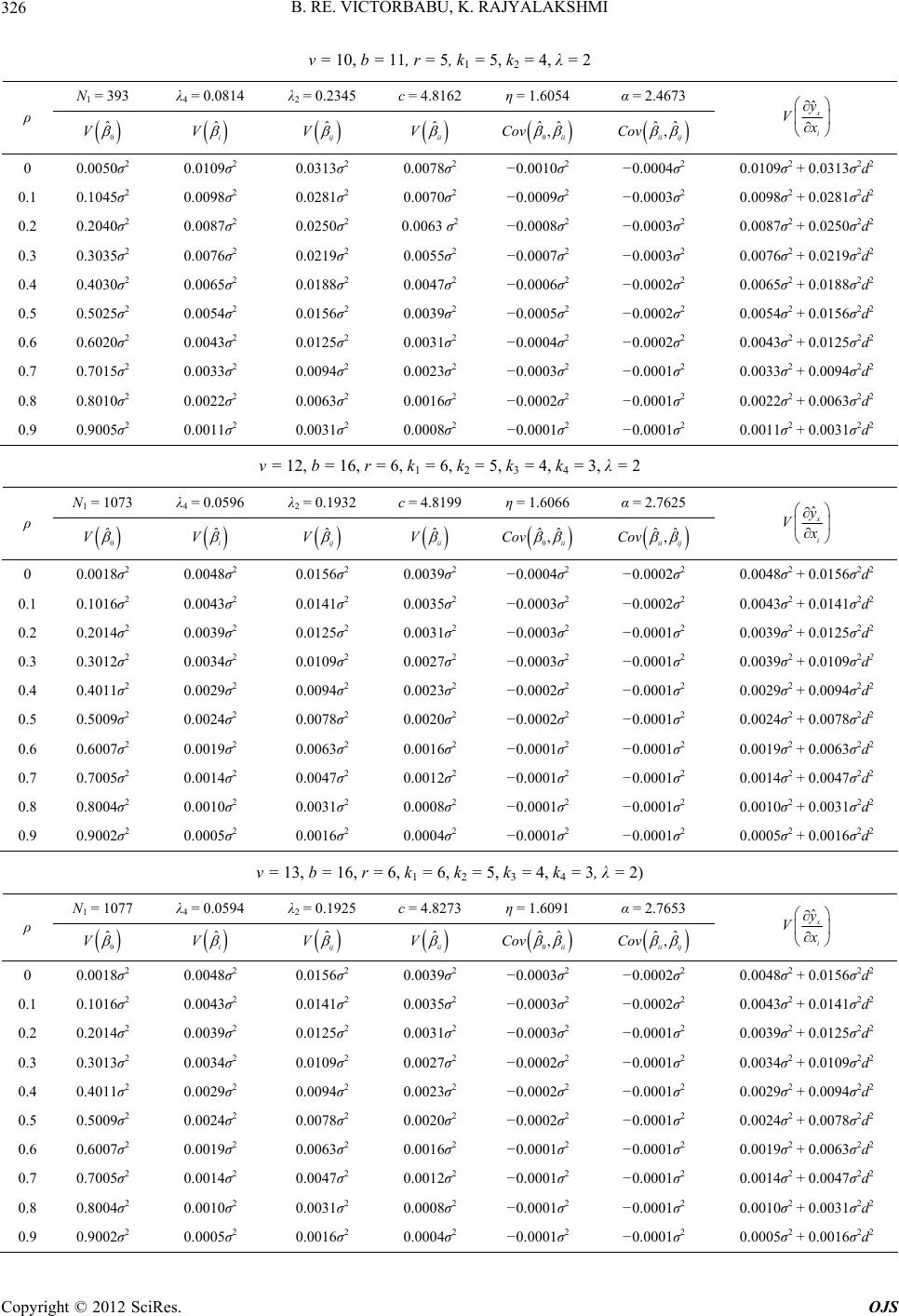 B. RE. VICTORBABU, K. RAJYALAKSHMI 326 v = 10, b = 11, r = 5, k1 = 5, k2 = 4, λ = 2 N1 = 393 λ4 = 0.0814 λ2 = 0.2345 c = 4.8162 η = 1.6054 α = 2.4673 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0050σ2 0.0109σ2 0.0313σ2 0.0078σ2 −0.0010σ2 −0.0004σ2 0.0109σ2 + 0.0313σ2d2 0.1 0.1045σ2 0.0098σ2 0.0281σ2 0.0070σ2 −0.0009σ2 −0.0003σ2 0.0098σ2 + 0.0281σ2d2 0.2 0.2040σ2 0.0087σ2 0.0250σ2 0.0063 σ2 −0.0008σ2 −0.0003σ2 0.0087σ2 + 0.0250σ2d2 0.3 0.3035σ2 0.0076σ2 0.0219σ2 0.0055σ2 −0.0007σ2 −0.0003σ2 0.0076σ2 + 0.0219σ2d2 0.4 0.4030σ2 0.0065σ2 0.0188σ2 0.0047σ2 −0.0006σ2 −0.0002σ2 0.0065σ2 + 0.0188σ2d2 0.5 0.5025σ2 0.0054σ2 0.0156σ2 0.0039σ2 −0.0005σ2 −0.0002σ2 0.0054σ2 + 0.0156σ2d2 0.6 0.6020σ2 0.0043σ2 0.0125σ2 0.0031σ2 −0.0004σ2 −0.0002σ2 0.0043σ2 + 0.0125σ2d2 0.7 0.7015σ2 0.0033σ2 0.0094σ2 0.0023σ2 −0.0003σ2 −0.0001σ2 0.0033σ2 + 0.0094σ2d2 0.8 0.8010σ2 0.0022σ2 0.0063σ2 0.0016σ2 −0.0002σ2 −0.0001σ2 0.0022σ2 + 0.0063σ2d2 0.9 0.9005σ2 0.0011σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0011σ2 + 0.0031σ2d2 v = 12, b = 16, r = 6, k1 = 6, k2 = 5, k3 = 4, k4 = 3, λ = 2 N1 = 1073 λ4 = 0.0596 λ2 = 0.1932 c = 4.8199 η = 1.6066 α = 2.7625 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0018σ2 0.0048σ2 0.0156σ2 0.0039σ2 −0.0004σ2 −0.0002σ2 0.0048σ2 + 0.0156σ2d2 0.1 0.1016σ2 0.0043σ2 0.0141σ2 0.0035σ2 −0.0003σ2 −0.0002σ2 0.0043σ2 + 0.0141σ2d2 0.2 0.2014σ2 0.0039σ2 0.0125σ2 0.0031σ2 −0.0003σ2 −0.0001σ2 0.0039σ2 + 0.0125σ2d2 0.3 0.3012σ2 0.0034σ2 0.0109σ2 0.0027σ2 −0.0003σ2 −0.0001σ2 0.0039σ2 + 0.0109σ2d2 0.4 0.4011σ2 0.0029σ2 0.0094σ2 0.0023σ2 −0.0002σ2 −0.0001σ2 0.0029σ2 + 0.0094σ2d2 0.5 0.5009σ2 0.0024σ2 0.0078σ2 0.0020σ2 −0.0002σ2 −0.0001σ2 0.0024σ2 + 0.0078σ2d2 0.6 0.6007σ2 0.0019σ2 0.0063σ2 0.0016σ2 −0.0001σ2 −0.0001σ2 0.0019σ2 + 0.0063σ2d2 0.7 0.7005σ2 0.0014σ2 0.0047σ2 0.0012σ2 −0.0001σ2 −0.0001σ2 0.0014σ2 + 0.0047σ2d2 0.8 0.8004σ2 0.0010σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0010σ2 + 0.0031σ2d2 0.9 0.9002σ2 0.0005σ2 0.0016σ2 0.0004σ2 −0.0001σ2 −0.0001σ2 0.0005σ2 + 0.0016σ2d2 v = 13, b = 16, r = 6, k1 = 6, k2 = 5, k3 = 4, k4 = 3, λ = 2) N1 = 1077 λ4 = 0.0594 λ2 = 0.1925 c = 4.8273 η = 1.6091 α = 2.7653 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0018σ2 0.0048σ2 0.0156σ2 0.0039σ2 −0.0003σ2 −0.0002σ2 0.0048σ2 + 0.0156σ2d2 0.1 0.1016σ2 0.0043σ2 0.0141σ2 0.0035σ2 −0.0003σ2 −0.0002σ2 0.0043σ2 + 0.0141σ2d2 0.2 0.2014σ2 0.0039σ2 0.0125σ2 0.0031σ2 −0.0003σ2 −0.0001σ2 0.0039σ2 + 0.0125σ2d2 0.3 0.3013σ2 0.0034σ2 0.0109σ2 0.0027σ2 −0.0002σ2 −0.0001σ2 0.0034σ2 + 0.0109σ2d2 0.4 0.4011σ2 0.0029σ2 0.0094σ2 0.0023σ2 −0.0002σ2 −0.0001σ2 0.0029σ2 + 0.0094σ2d2 0.5 0.5009σ2 0.0024σ2 0.0078σ2 0.0020σ2 −0.0002σ2 −0.0001σ2 0.0024σ2 + 0.0078σ2d2 0.6 0.6007σ2 0.0019σ2 0.0063σ2 0.0016σ2 −0.0001σ2 −0.0001σ2 0.0019σ2 + 0.0063σ2d2 0.7 0.7005σ2 0.0014σ2 0.0047σ2 0.0012σ2 −0.0001σ2 −0.0001σ2 0.0014σ2 + 0.0047σ2d2 0.8 0.8004σ2 0.0010σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0010σ2 + 0.0031σ2d2 0.9 0.9002σ2 0.0005σ2 0.0016σ2 0.0004σ2 −0.0001σ2 −0.0001σ2 0.0005σ2 + 0.0016σ2d2 Copyright © 2012 SciRes. OJS 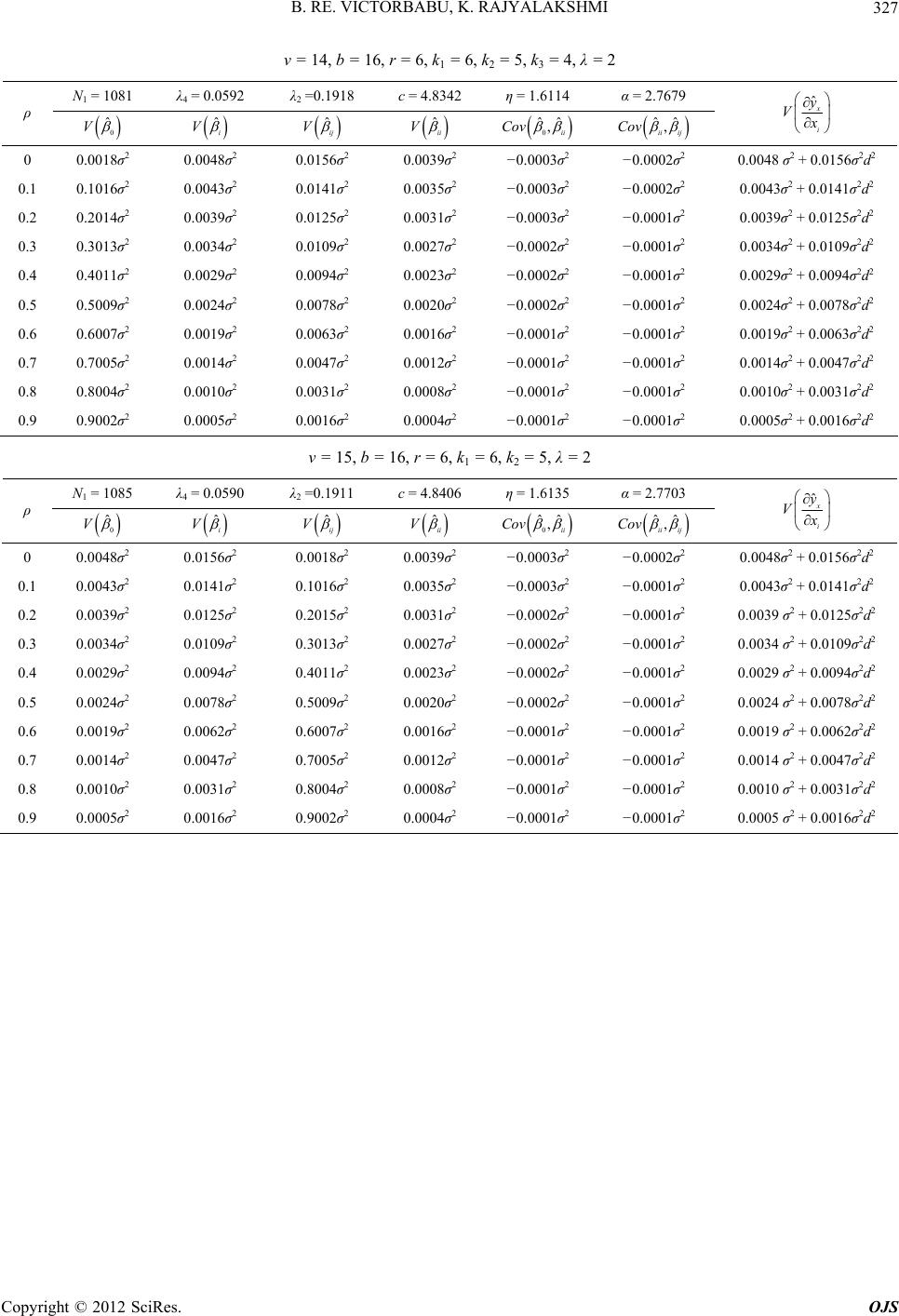 B. RE. VICTORBABU, K. RAJYALAKSHMI Copyright © 2012 SciRes. OJS 327 v = 14, b = 16, r = 6, k1 = 6, k2 = 5, k3 = 4, λ = 2 N1 = 1081 λ4 = 0.0592 λ2 =0.1918 c = 4.8342 η = 1.6114 α = 2.7679 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0018σ2 0.0048σ2 0.0156σ2 0.0039σ2 −0.0003σ2 −0.0002σ2 0.0048 σ2 + 0.0156σ2d2 0.1 0.1016σ2 0.0043σ2 0.0141σ2 0.0035σ2 −0.0003σ2 −0.0002σ2 0.0043σ2 + 0.0141σ2d2 0.2 0.2014σ2 0.0039σ2 0.0125σ2 0.0031σ2 −0.0003σ2 −0.0001σ2 0.0039σ2 + 0.0125σ2d2 0.3 0.3013σ2 0.0034σ2 0.0109σ2 0.0027σ2 −0.0002σ2 −0.0001σ2 0.0034σ2 + 0.0109σ2d2 0.4 0.4011σ2 0.0029σ2 0.0094σ2 0.0023σ2 −0.0002σ2 −0.0001σ2 0.0029σ2 + 0.0094σ2d2 0.5 0.5009σ2 0.0024σ2 0.0078σ2 0.0020σ2 −0.0002σ2 −0.0001σ2 0.0024σ2 + 0.0078σ2d2 0.6 0.6007σ2 0.0019σ2 0.0063σ2 0.0016σ2 −0.0001σ2 −0.0001σ2 0.0019σ2 + 0.0063σ2d2 0.7 0.7005σ2 0.0014σ2 0.0047σ2 0.0012σ2 −0.0001σ2 −0.0001σ2 0.0014σ2 + 0.0047σ2d2 0.8 0.8004σ2 0.0010σ2 0.0031σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0010σ2 + 0.0031σ2d2 0.9 0.9002σ2 0.0005σ2 0.0016σ2 0.0004σ2 −0.0001σ2 −0.0001σ2 0.0005σ2 + 0.0016σ2d2 v = 15, b = 16, r = 6, k1 = 6, k2 = 5, λ = 2 N1 = 1085 λ4 = 0.0590 λ2 =0.1911 c = 4.8406 η = 1.6135 α = 2.7703 ρ 0 ˆ V ˆi V ˆij V ˆii V 0, ˆˆii Cov ˆij ˆx i ˆ, ii Cov y V 0 0.0048σ2 0.0156σ2 0.0018σ2 0.0039σ2 −0.0003σ2 −0.0002σ2 0.0048σ2 + 0.0156σ2d2 0.1 0.0043σ2 0.0141σ2 0.1016σ2 0.0035σ2 −0.0003σ2 −0.0001σ2 0.0043σ2 + 0.0141σ2d2 0.2 0.0039σ2 0.0125σ2 0.2015σ2 0.0031σ2 −0.0002σ2 −0.0001σ2 0.0039 σ2 + 0.0125σ2d2 0.3 0.0034σ2 0.0109σ2 0.3013σ2 0.0027σ2 −0.0002σ2 −0.0001σ2 0.0034 σ2 + 0.0109σ2d2 0.4 0.0029σ2 0.0094σ2 0.4011σ2 0.0023σ2 −0.0002σ2 −0.0001σ2 0.0029 σ2 + 0.0094σ2d2 0.5 0.0024σ2 0.0078σ2 0.5009σ2 0.0020σ2 −0.0002σ2 −0.0001σ2 0.0024 σ2 + 0.0078σ2d2 0.6 0.0019σ2 0.0062σ2 0.6007σ2 0.0016σ2 −0.0001σ2 −0.0001σ2 0.0019 σ2 + 0.0062σ2d2 0.7 0.0014σ2 0.0047σ2 0.7005σ2 0.0012σ2 −0.0001σ2 −0.0001σ2 0.0014 σ2 + 0.0047σ2d2 0.8 0.0010σ2 0.0031σ2 0.8004σ2 0.0008σ2 −0.0001σ2 −0.0001σ2 0.0010 σ2 + 0.0031σ2d2 0.9 0.0005σ2 0.0016σ2 0.9002σ2 0.0004σ2 −0.0001σ2 −0.0001σ2 0.0005 σ2 + 0.0016σ2d2
|