Intelligent Control and Automation
Vol.08 No.01(2017), Article ID:73191,14 pages
10.4236/ica.2017.81002
Enlarged Gradient Observability for Distributed Parabolic Systems: HUM Approach
Hayat Zouiten, Ali Boutoulout, Fatima Zahrae EL Alaoui
TSI Team, MACS Laboratory, Faculty of Sciences, Moulay Ismail University, Meknes, Morocco

Copyright © 2017 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/



Received: November 8, 2016; Accepted: December 27, 2016; Published: December 30, 2016
ABSTRACT
This paper is focused on studying an important concept of the system analysis, which is the regional enlarged observability or constrained observability of the gradient for distributed parabolic systems evolving in the spatial domain We will explore an approach based on the Hilbert Uniqueness Method (HUM), which can reconstruct the initial gradient state between two prescribed functions and only in a critical subregion of without the knowledge of the state. Finally, the obtained results are illustrated by numerical simulations.
Keywords:
Distributed Systems, Parabolic Systems, Regional Enlarged Observability, Gradient Reconstruction, HUM Approach

1. Introduction
Control problem of partial differential equation (PDE) arises in many different contexts and engineering applications. A prototypical problem is that of observability, which is one of the most fundamental concepts in mathematical control theory, and has been the object of various works (see [1] , [2] , [3] ), whose the aim is the possibility to reconstruct the initial state of the distributed system based on partial measurements taken on the system by means of tools called sensors. This concept depends on a very sensitive way of the class of PDE under consideration, in particular, the case of the heat and wave equations.
For distributed parameter systems, the concept of regional observability was introduced by El Jai et al. and interesting results have been obtained, whose target of interest is not fully the geometrical evolution domain but just in an internal subregion of (see [4] , [5] ) or on a part of the boundary of (see [6] , [7] ). Later the notion of regional gradient observability was developed (see [8] ); it concerns the reconstruction of the initial state gradient only in a critical subregion of the system without the knowledge of the state. This concept finds its applications for many real problems. For example, the problem of estimating the energy exchanges between a casting plasma on a plane target which is perpendicular to the direction of the flow sub-diffusion process from measurements carried out by internal thermocouples.
Here we are interested in the concept of the regional enlarged observability of the gradient, which consists in reconstructing the initial gradient state between two prescribed profiles and only in a critical subregion interior of the evolution domain without the knowledge of the state. The introduction of this concept is motivated by many real problems. This is the case, for example, of the biological treatment of wastewater using a fixed bed bioreactor. The process has to regulate the substrate concentration of the bottom of the reactor between two prescribed levels. This concept was studied using two approaches where the first one is based on subdifferential techniques and the second one uses the Lagrangian multiplier method (see [9] , [10] ). In this work, we solve this problem using an extension of the Hilbert Uniqueness Method (HUM) developed by Lions (see [11] , [12] ).
The paper is structured as follows. Section 2 we recall the regional enlarged gradient observability of a linear parabolic system, then we give some definition and properties related to this notion. Section 3 concerns a reconstruction approach using an extension of the Hilbert Uniqueness Method. Section 4 we develop a numerical approach, which is illustrated by simulations that lead to some conjectures.
2. Problem Statement
Let be an open bounded domain in ( ), with a regular boundary For let’s consider and We consider the following system
(1)
where is a second-order linear differential operator with compact resolvent which generates a strongly continuous semi-group on the Hilbert space We assume that is unknown. The observation space is
The measurements are obtained by the output function given by
(2)
where is called the observation operator, linear (possibly unbounded) depending on the structure and the number of the considered sensors, with dense S-invariant domain One of the most popular examples equations with unbounded observation operator is a system of a linear partial differential equation which describes by pointwise sensors.
Moreover, the system (1) is autonomous the output function can be expressed by
(3)
where is linear operator. To obtain the adjoint operator of we have
Case 1. C is bounded (e.g. zone sensors)
We denote and its adjoint. We get that the adjoint operator of can be given by
Case 2. C is unbounded (e.g. pointwise sensors)
In this case, we have with denote its adjoint. Based on the works (see [13] , [14] , [15] ), to state our results, we have to make the following assumptions:
can be extended to a bounded linear operator in
exists and
Extend by with Then the adjoint operator of can be defined as
For a subregion of with a positive Lebesgue measure, let be the restriction function defined by
with the adjoint given by
Let’s consider the operator
Its adjoint is given by
where is the solution of the following Dirichlet problem
(4)
We recall that a sensor is conventionally defined by a couple , where is its spatial support represented by a nonempty part of and is the spatial distribution of the information on the support Then the output function (2) can be written in the following form
(5)
A sensor may be pointwise (internal or boundary) if with and where is the Dirac mass concentrated in and the sensor is then denoted by In this case, the operator is unbounded and the output function (2) can be written in the form
(6)
We also recall that the system (1) together with the output (2) is said to be exactly (respectively weakly) gradient observable in if (respectively ). For more details, we refer the reader to (see [8] ).
Let and be two functions defined in such that a.e. in for all Throughout the paper we set
Definition 1. The system (1) together with the output (2) is said to be -gradient observable in if
Definition 2. The sensor is said to be -gradient strategic in if the observed system is -gradient observable in
Remark 1.
• If the system (1) together with the output (2) is -gradient observable in then it is -gradient observable in any subregion
• If the system (1) together with the output (2) is exactly gradient observable in then it is -gradient observable in
Proposition 1. We have the equivalence between the following statements.
1. The system (1) together with the output (2) is -gradient observable in
2.
Proof. (1) (2)
We shall show that
Suppose that
Let’s consider such that Then and We have thus such that
Therefore
Then
Hence
We have
accordingly
then
Since
we have
Consequently
(2) (1)
We shall show that
Suppose that
Let’s consider
then
We have
hence
Thus
which shows that the system (1) together with the output (2) is - gradient observable in
3. HUM Approach
In this section, we present an approach that allows the reconstruction of the initial gradient state in The approach constitutes an extension of the Hilbert Uniqueness Method developed by Lions (see [11] ) to the case of regional enlarged observability of the gradient. Let the initial state gradient decomposed in the following form
(7)
In the sequel our object is the reconstruction of the component in let be defined by
(8)
For we consider the system
(9)
which admits a unique solution (see [16] ). Let us go further in the state reconstruction by considering various types of sensors.
3.1. Pointwise Sensors
In this case, the output function is given by
(10)
where denote the given location of the sensor.
For there exists a unique such that Then we consider the semi-norm on be defined by
(11)
where the solution of (9). We consider the following retrograde system
(12)
which admits a unique solution (see [16] ).
Let the operator be defined by
(13)
where and
Let’s consider the system
(14)
If is chosen such that in then the system (14) could be seen as an adjoint of the system (1) and our problem of the enlarged gradient observability is to solve the equation
(15)
where with is the solution of the system (14).
Proposition 2. If the system (1) together with the output (2) is - gradient observable in then the equation (15) admits a unique solution which coincides with the initial gradient state to be observed in
Proof. 1. Firstly, we show that if the system (1) together with the output (2) is -gradient observable in then (11) defines a norm on
Let’s consider we have
Then
Since the observed system is -gradient observable in we obtain
Then hence Consequently Thus (11) is a norm.
2. Now let us prove that (15) has a unique solution. Equation (15) admits a unique solution if the operator is an isomorphism.
Indeed, multiplying (12) by and integrating the result over we obtain
which gives
With the initial condition, we have
Using the Green formula, we obtain
Hence
Thus
Then
We deduce that is an isomorphism, consequently the equation (15) has a unique solution which corresponds to the initial state observed in
3.2. Zonal Sensors
Let us come back to the system (1) and suppose that the measurements are given by an internal zone sensor defined by with and The system is augmented with the output function
(16)
In this case, we consider the system (9), is given by (8), and we define a semi-norm on by
(17)
With the system
(18)
we introduce the operator
(19)
where and
Let’s consider the system
(20)
If is chosen such that in then the system (20) can be seen as an adjoint of the system (1) and our problem of the enlarged gradient observability is to solve the equation
(21)
where with the solution of the system (20).
Proposition 3. If the system (1) together with the output (2) is - gradient observable in then the equation (21) has a unique solution which coincides with the initial gradient state observed in
Proof. The proof is similar to the pointwise case.
4. Numerical Approach
We consider the system (1) observed by a pointwise sensor located in In the previous section, it was shown that the regional enlarged observability of the initial gradient state in is equivalent, in all cases, to solving the equation
(22)
The numerical approximation of (22) is realized when one can have a basis of and the idea is to calculate the components of the operator
Then we approximate the solution of (22) by the linear system
(23)
where N is the order of approximation and are the components of in the basis considered.
Let be a complete set of the eigenfunctions of the operator in which is orthonormal in We also consider a basis of denoted by Then the components are the solutions of the following equation, for a pointwise sensor
(24)
In the case of a zonal sensor we obtain
(25)
Then, we have the following algorithm :
Algorithm.
Step 1: The subregion the location of the sensor b.
Choose the function
Threshold accuracy
Step 2: Repeat
Solve the system (9) to obtain
Solve the system (14) to obtain
Solve the equation (23) to obtain
Until
Step 3: The solution corresponds to the initial gradient state to be observed in
5. Simulation Results
Here, we present a numerical example which illustrates the previous algorithm. The obtained results are related to the initial gradient state and the sensors location.
Let’s consider the following one-dimensional system in excited by a pointwise sensor
(26)
augmented with the output function
(27)
The initial gradient state to be reconstructed is
We take and with
Applying the previous algorithm, we obtain the following results:
For
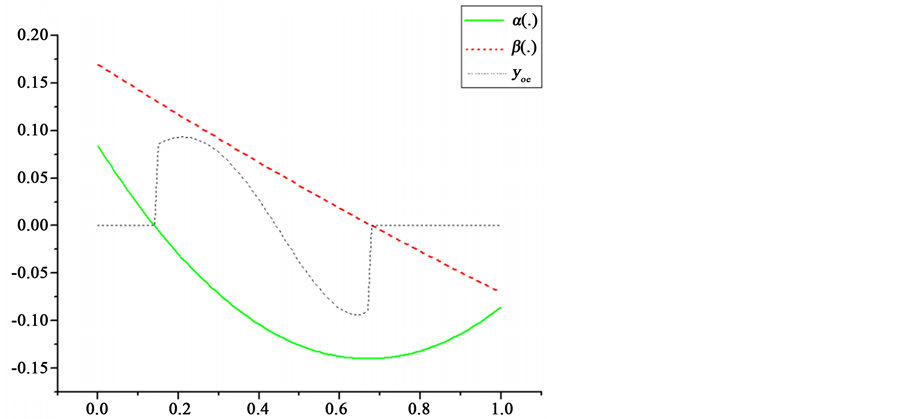
Figure 1. The estimated initial gradient state
Figure 1 shows that the initial gradient state estimated is between and in then the location of the sensor is - gradient strategic in
The initial gradient state is estimated with a reconstruction error
If the sensor is located in b = 0.32, we obtain the Figure 2.
Figure 2 is showing that the initial gradient state estimated is not between and in this means that the location of the sensor is not -gradient strategic in

Figure 2. The estimated initial gradient state
Here numerically we study the dependence of the gradient reconstruction error with respect to the subregion area of We have the following Table 1.

Table 1. Relation between the subregion and the reconstruction error.
Table 1 shows how the reconstruction error grows with respect to the subre- gion area.
The following simulation results show the evolution of the observed gradient error with respect to the sensor location.

Figure 3. Evolution of the estimated gradient error with respect to the sensor location b.
Figure 3 shows how the worst locations of the sensor correspond to a great error, which corresponds to the non-strategic sensor location.
6. Conclusion
In this work, we have considered the problem of regional enlarged observability of the gradient for parabolic linear systems. We explored an approach that leads to the reconstruction of the initial gradient state between two prescribed functions. The obtained results were applied to the head equation in a one- dimen- sional case and illustrated by numerical example and simulations. Future works aim to extend this notion in a part of the boundary of the system evolution domain
Acknowledgements
This work has been carried out with a grant from Hassan II Academy of Sciences and Technology.
Cite this paper
Zouiten, H., Boutoulout, A. and EL Alaoui, F.Z. (2017) Enlarged Gradient Observability for Distributed Parabolic Systems: HUM Approach. Intelligent Control and Automation, 8, 15- 28. https://doi.org/10.4236/ica.2017.81002
References
- 1. EL Jai, A. and Pritchard, A.J. (1988) Sensors and Actuators in Distributed Systems Analysis. Ellis Horwood Series in Applied Mathematics, John Wiley & Sons, Hoboken, New Jersey.
- 2. Curtain, R.F. and Pritchard, A.J. (1978) Infinite Dimensional Linear Systems Theory. Lecture Notes in Control and Information Sciences, 8, Springer, New York. https://doi.org/10.1007/BFb0006761
- 3. Curtain, R.F. and Zwart, H. (1995) An Introduction to Infinite Dimensional Linear Systems Theory. Texts in Applied Mathematics, 21, Springer Verlag, New York. https://doi.org/10.1007/978-1-4612-4224-6
- 4. Amouroux, M., EL Jai, A. and Zerrik, E. (1994) Regional Observability of Distributed Systems. International Journal of Systems Science, 25, 301-313. https://doi.org/10.1080/00207729408928961
- 5. EL Jai, A., Simon, M.C. and Zerrik, E. (1993) Regional Observability and Sensors Structures. Sensors and Actuators Journal, 39, 95-102. https://doi.org/10.1016/0924-4247(93)80204-T
- 6. Zerrik, E., Badraoui, L. and El Jai, A. (1999) Sensors and Regional Boundary State Reconstruction of Parabolic Systems. Sensors and Actuators Journal, 75, 102-117. https://doi.org/10.1016/S0924-4247(98)00293-3
- 7. Zerrik, E., Bourray, H. and Boutoulout, A. (2002) Regional Boundary Observability: A Numerical Approach. International Journal of Applied Mathematics and Computer Science, 12, 143-151.
- 8. Zerrik, E. and Bourray, H. (2003) Gradient Observability for Diffusion Systems. Int. Journal of Applied Mathematics and Computing, 13, 139-150.
- 9. Boutoulout, A., Bourray, H. and Baddi, M. (2011) Constrained Observability for Parabolic Systems. International Journal of Mathematical Analysis, 5, 1695-1710.
- 10. Boutoulout, A., Bourray, H. and Baddi, M. (2011) Regional Observability with Constraints of the Gradient. International Journal of Pure and Applied Mathematical, 73, 235-253.
- 11. Lions, J.L. (1988) Contrôlabilité exacte perturbations et stabilisation des systèmes distribués, Tome 1, contrôlabilité exacte. Masson, Paris.
- 12. Lions, J.L. (1989) Sur la contrôlabilité exacte élargie. Progress in Nonlinear Differential Equations and Their Applications, 1, 703-727.
- 13. Balakrichnan, A. (1976) Applied Function Analysis. Springer-Verlag, Berlin.
- 14. Pritchard, A.J. and Wirth, A. (1978) Unbounded Control and Observation Systems and Their Duality. SIAM Journal on Control and Optimization, 16, 535-545. https://doi.org/10.1137/0316036
- 15. Reed, M. and Simon, B. (1972) Methods of Mathematical Physics 1: Functional Analysis. Academic Press, New York.
- 16. Lions, J.L. and Magenes, E. (1968) Problèmes aux limites non homogènes et applications. Vol. 1 and 2, Dunod, Paris.