Applied Mathematics
Vol.06 No.02(2015), Article ID:54176,8 pages
10.4236/am.2015.62039
Generalized Spectrum of Steklov-Robin Type Problem for Elliptic Systems
Alzaki Fadlallah, Kwadwo Antwi-Fordjour, Marius N. Nkashama
Department of Mathematics, University of Alabama at Birmingham, Birmingham, USA
Email: zakima99@uab.edu, kantwi@uab.edu, nkashama@math.uab.edu
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 25 January 2015; accepted 13 February 2015; published 17 February 2015
ABSTRACT
We will study the generalized Steklov-Robin eigenproblem (with possibly matrix weights) in which the spectral parameter is both in the system and on the boundary. The weights may be singular on subsets of positive measure. We prove the existence of an increasing unbounded sequence of eigenvalues. The method of proof makes use of variational arguments.
Keywords:
Steklov-Robin, Variational Arguments, Matrix Weights

1. Introduction
We study the generalized Steklov-Robin eigenproblem. This spectrum includes the Steklov, Neumann and Robin spectra. We therefore generalize the results in [1] -[4] .
Consider the elliptic system
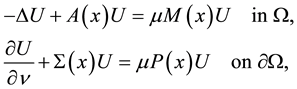 (1)
(1)
where ,
,  is a bounded domain with boundary
is a bounded domain with boundary  of class
of class ,
,
![]() Throughout this paper all matrices are symmetric. The matrix
Throughout this paper all matrices are symmetric. The matrix
![]()
verifies the following conditions:
(A1) The functions ![]()
(A2) ![]() is positive semidefinite a.e. on Ω with
is positive semidefinite a.e. on Ω with ![]() for
for ![]() when
when![]() , and
, and ![]() when
when ![]()
The matrix
![]()
satisfies the following conditions:
(M1)  is positive semidefinite a.e. on Ω The functions
is positive semidefinite a.e. on Ω The functions  for
for  when
when , and
, and  when
when 
 is the outward (unit) normal derivative on
is the outward (unit) normal derivative on  The matrix
The matrix

verifies the following conditions:
(S1) The functions 
(S2)  is positive semidefinite a.e. on
is positive semidefinite a.e. on  with
with  for
for  when
when , and
, and  when
when 
and the matrix

(P1)  is positive semidefinite a.e. on
is positive semidefinite a.e. on  for
for  when
when , and
, and  when
when 
We assume that  verify the following assumptions:
verify the following assumptions:
Assumption 1. 1)  is positive definite on a set of positive measure of Ω,
is positive definite on a set of positive measure of Ω,
2)  is positive definite on a set of positive measure of
is positive definite on a set of positive measure of 
3)  is positive definite on a set of positive measure of Ω with
is positive definite on a set of positive measure of Ω with 
4)  is positive definite on a set of positive measure of
is positive definite on a set of positive measure of 
Remark 2. Assumption 1 is equivalent to

Remark 3. Since  satisfy (A2), (S2), (M1), (P1) respectively, then we can write them in the following form (i.e.; eigen-decomposition of a positive semi-definite matrix or diagonalization)
satisfy (A2), (S2), (M1), (P1) respectively, then we can write them in the following form (i.e.; eigen-decomposition of a positive semi-definite matrix or diagonalization)

where  (
( i.e.; are orthogonal matrices) are the normalized eigenvectors, I is the identity matrix,
i.e.; are orthogonal matrices) are the normalized eigenvectors, I is the identity matrix,  is diagonal matrix and in the diagonal of
is diagonal matrix and in the diagonal of  are the eigenvalues of J (i.e.;
are the eigenvalues of J (i.e.; ) and
) and 
Remark 4. The weight matrices  and
and  may vanish on subsets of positive measure.
may vanish on subsets of positive measure.
Definition 1. The generalized Steklov-Robin eigensystem is to find a pair  with
with  such that
such that
 (2)
(2)
Remark 5. Let  in (2) if there is such an eigenpair, then
in (2) if there is such an eigenpair, then  and
and

Indeed, if  or
or  then
then

We have that  which implies that
which implies that  and
and  this implies that
this implies that
 a.e. (with
a.e. (with ) in Ω. This implies that
) in Ω. This implies that  is not positive definite on a subset of Ω of
is not positive definite on a subset of Ω of
positive measure, and  then
then  a.e. with
a.e. with  on
on  This implies
This implies
that  is not positive definite on subset of
is not positive definite on subset of  of positive measure. So we have that,
of positive measure. So we have that,  would be a constant vector function; which would contradict the assumptions (Assumption 1) imposed on
would be a constant vector function; which would contradict the assumptions (Assumption 1) imposed on  and
and 
Remark 6. If  and
and  then
then  is an eigenvalue of the system (1) with eigenfunction
is an eigenvalue of the system (1) with eigenfunction  vector function on
vector function on .
.
It is therefore appropriate to consider the closed linear subspace (to be shown below) of  under Assumption 1 defined by
under Assumption 1 defined by

Now all the eigenfunctions associated with (2) must belong to the  -orthogonal complement
-orthogonal complement
 of this subspace in
of this subspace in  We will show that indeed
We will show that indeed  is subspace of
is subspace of
 Let
Let  and
and ![]() we wish to show that
we wish to show that ![]() and
and ![]()
![]()
Therefore ![]() Now we show that
Now we show that ![]()
![]()
Since ![]() it follows that
it follows that
![]()
By setting ![]() we get
we get
![]()
Since ![]() for a.e.
for a.e. ![]() it readily follows that
it readily follows that
![]()
that is, the vector ![]() satisfies
satisfies
![]()
or equivalently
![]()
Hence,
![]()
since ![]() A similar arguments shows that
A similar arguments shows that
![]()
Therefore ![]() so we have that
so we have that ![]() is a subspace of
is a subspace of ![]() Thus, one can split the Hilbert space
Thus, one can split the Hilbert space ![]() as a direct
as a direct ![]() -orthogonal sum in the following way
-orthogonal sum in the following way
![]()
Remark 7. 1) If ![]() in Ω, then the subspace
in Ω, then the subspace ![]() provided
provided ![]() on
on![]() .
.
2) If ![]() in
in ![]() and
and![]() , then the subspace
, then the subspace ![]() provided
provided ![]() on Ω.
on Ω.
・ We shall make use in what follows the real Lebesgue space ![]() for
for![]() , and of the continuity and compactness of the trace operator
, and of the continuity and compactness of the trace operator
![]()
is well-defined, it is a Lebesgue integrable function with respect to Hausdorff ![]() dimensional measure. Sometimes we will just use U in place of
dimensional measure. Sometimes we will just use U in place of ![]() when considering the trace of a function on
when considering the trace of a function on![]() . Throughout, this work we denote the
. Throughout, this work we denote the ![]() -inner product by
-inner product by
![]()
and the associated norm by
![]()
(see [5] , [6] and the references therein for more details).
・ The trace mapping ![]() is compact (see [7] ).
is compact (see [7] ).
![]() (3)
(3)
defines an inner product for![]() , with associated norm
, with associated norm
![]() (4)
(4)
Now, we state some auxiliary result, which will be need in the sequel for the proof of our main result. Using the Hölder inequality, the continuity of the trace operator, the Sobolev embedding theorem and lower semicontinuity of![]() , we deduce that
, we deduce that ![]() is equivalent to the standard
is equivalent to the standard ![]() -norm. This observation enables us to prove the existence of an unbounded and discrete spectrum for the Steklov-Robin eigenproblem (1) and discuss some of its properties.
-norm. This observation enables us to prove the existence of an unbounded and discrete spectrum for the Steklov-Robin eigenproblem (1) and discuss some of its properties.
Definition 2. Define the functional
![]()
![]()
and
![]()
![]()
Lemma 1. Suppose (A2), (S2), (M1), (P1) are met. Then the functionals ![]() and
and ![]() are C1-functional (i.e.; continuously differentiable).
are C1-functional (i.e.; continuously differentiable).
See [8] for the proof of Lemma 1.
Theorem 8. ![]() is G-differentiable and convex. Then
is G-differentiable and convex. Then ![]() is weakly lower-semi-continuous.
is weakly lower-semi-continuous.
See [8] for the proof of Theorem 8.
2. Main Result
Theorem 9. Assume Assumption 1 as above, then we have the following.
1) The eigensystem (1) has a sequence of real eigenvalues
![]()
and each eigenvalue has a finite-dimensional eigenspace.
2) The eigenfunctions ![]() corresponding to the eigenvalues
corresponding to the eigenvalues ![]() from an
from an ![]() -orthogonal and
-orthogonal and ![]() - orthonormal family in
- orthonormal family in ![]() (a closed subspace of
(a closed subspace of![]() ).
).
3) The normalized eigenfunctions provide a complete ![]() -orthonormal basis of
-orthonormal basis of ![]() Moreover, each function
Moreover, each function ![]() has a unique representation of the from
has a unique representation of the from
![]() (5)
(5)
In addition,
![]()
Proof of Theorem 9. We will prove the existence of a sequence of real eigenvalues ![]() and the eigenfunc-
and the eigenfunc-
tions ![]() corresponding to the eigenvalues that from an orthogonal family in
corresponding to the eigenvalues that from an orthogonal family in![]() .
.
We show that ![]() attains its minimum on the constraint set
attains its minimum on the constraint set
![]()
Let ![]() by using the continuity of the trace operator, the Sobolev embedding theorem and
by using the continuity of the trace operator, the Sobolev embedding theorem and
the lower-semi-continuity of ![]()
Let ![]() be a minimizing sequence in W0 for
be a minimizing sequence in W0 for ![]() since
since ![]() we have that
we have that ![]() by the definition of
by the definition of ![]() we have that for all
we have that for all ![]() and for all sufficiently large l, then
and for all sufficiently large l, then ![]() by using the equivalent norm we have that, there is exist
by using the equivalent norm we have that, there is exist ![]() such that
such that
![]()
so we have that
![]()
Therefore, this sequence is bounded in![]() . Thus it has a weakly convergent subsequence
. Thus it has a weakly convergent subsequence ![]()
which convergent weakly to ![]() in
in![]() . From Rellich-Kondrachov theorem this subsequence converges strongly to
. From Rellich-Kondrachov theorem this subsequence converges strongly to ![]() in
in ![]() so
so ![]() in W0. Thus
in W0. Thus ![]() as the functional is weakly l.s.c. (see Theorem 8).
as the functional is weakly l.s.c. (see Theorem 8).
There exists ![]() such that
such that![]() . Hence,
. Hence, ![]() attains its minimum at
attains its minimum at ![]() and
and  satisfies the following
satisfies the following
 (6)
(6)
for all  We see that
We see that  satisfies Equation (2) in a weak sense and
satisfies Equation (2) in a weak sense and  this im-
this im-
plies that  by the definition of W0. Now take
by the definition of W0. Now take  in Equation (6), we obtain that the eigenvalue
in Equation (6), we obtain that the eigenvalue  is the infimum
is the infimum . This means that we could define
. This means that we could define  by the Rayleigh quotient
by the Rayleigh quotient

Clearly, . Indeed assume that
. Indeed assume that  then
then  on
on  hence
hence  must be a constant and
must be a constant and  with
with  that contradicts the assumptions imposed on
that contradicts the assumptions imposed on . Thus
. Thus .
.
Now we show the existence of higher eigenvalues.
Define

We know that the kernel of 

Since W1 is the null-space of the continuous functional  on
on  W1 is a closed sub-
W1 is a closed sub-
space of , and it is therefore a Hilbert space itself under the same inner product
, and it is therefore a Hilbert space itself under the same inner product . Now
. Now
we define

Since  then we have that
then we have that . Now we define
. Now we define

we know that the kernel of 

Since W2 is the null-space of the continuous functional  on
on , W2 is a closed subspace of
, W2 is a closed subspace of , and it is therefore a Hilbert space itself under the same inner product
, and it is therefore a Hilbert space itself under the same inner product . Now
. Now
we define

Since  then we have that
then we have that  Moreover, we can repeat the above arguments to show that
Moreover, we can repeat the above arguments to show that 
is achieved at some 
We let

and

Since  then we have that
then we have that . Moreover, we can repeat the above arguments to show that
. Moreover, we can repeat the above arguments to show that 
is achieved at some 
Proceeding inductively, in general we can define

we know that the kernel of 

Since Wj is the null-space of the continuous functional  on
on , Wj is a closed subspace
, Wj is a closed subspace
of , and it is therefore a Hilbert space itself under the same inner product
, and it is therefore a Hilbert space itself under the same inner product  Now we define
Now we define

In this way, we generate a sequence of eigenvalues

whose associated  are c-orthogonal and
are c-orthogonal and  -orthonormal in
-orthonormal in 
Claim 1  as
as 
Proof of claim 1. By way of contradiction, assume that the sequence is bounded above by a constant. Therefore, the corresponding sequence of eigenfunctions  is bounded in
is bounded in  By Rellich-Kondrachov theorem and the compactness of the trace operator, there is a Cauchy subsequence (which we again denote by
By Rellich-Kondrachov theorem and the compactness of the trace operator, there is a Cauchy subsequence (which we again denote by ), such that
), such that
 (7)
(7)
Since the  are
are  -orthonormal, we have that
-orthonormal, we have that , if
, if 
which contradicts Equation (7). Thus,  We have that each
We have that each  occurs only finitely many times.
occurs only finitely many times.
Claim 2
Each eigenvalue  has a finite-dimensional eigenspace.
has a finite-dimensional eigenspace.
See [8] for the proof of claim 2.
We will now show that the normalized eigenfunctions provide a complete orthonormal basis of . Let
. Let

so that 
Claim 3
The sequence  is a maximal
is a maximal  -orthonormal family of
-orthonormal family of . (We know that the set is
. (We know that the set is
maximal  -orthonormal if and only if it is a complete orthonormal basis).
-orthonormal if and only if it is a complete orthonormal basis).
Proof of Claim 3. By way of contradiction, assume that the sequence  is not maximal, then there exists a
is not maximal, then there exists a  and
and  such that
such that  and
and , i.e.;
, i.e.;

since . Therefore
. Therefore . We have that
. We have that . It follows from the definition of
. It follows from the definition of  that
that

Since we know from Claim 1 that  as
as  we have that
we have that  Therefore
Therefore  a.e in Ω, which contradicts the definition of ξ. Thus the sequence
a.e in Ω, which contradicts the definition of ξ. Thus the sequence  is a maximal
is a maximal  -orthonormal family of
-orthonormal family of  so the sequence
so the sequence  provides a complete orthonormal basis of
provides a complete orthonormal basis of  that is, for any
that is, for any ,
,  with
with  and
and


Now let

Therefore,

and

Claim 4
We shall show that

Proof of Claim 4.

Thus

References
- Auchmuty, G. (2012) Bases and Comparison Results for Linear Elliptic Eigenproblems. Journal of Mathematical Analysis and Applications, 390, 394-406. http://dx.doi.org/10.1016/j.jmaa.2012.01.051
- Mavinga, N. (2012) Generalized Eigenproblem and Nonlinear Elliptic Equations with Nonlinear Boundary Conditions. Proceedings of the Royal Society of Edinburgh: Section A Mathematics, 142, 137-153.
- de Godoi, J.D.B., Miyagaki, O.H. and Rodrigues, R.S. (2013) Steklov-Neumann Eigenvalue Problems for a Class of Elliptic System. SP-Brazil.
- Steklov, L.M.W. (1902) Sur les problèmes fundamentaux de la physique mathématique. Annali Scuola Norm. Sup. Pisa, 19, 455-490.
- Küfner, A., John, O. and Fučik, S. (1977) Function Spaces. Noordhoff International Publishing, Leyden.
- Nečas, J. (1967) Les Mèthodes directes en thèorie des equations elliptiques. Masson, Paris.
- Grisvard, P. (1985) Elliptic Problems in Nonsmooth Domains. Pitman, Boston.
- Fadlallah, A. (2015) Elliptic Equations and Systems with Nonlinear Boundary Conditions. Ph.D. Dissertation, University of Alabama at Birmingham (UAB), Birmingham.