G. SCHIRRIPA SPAGNOLO ET AL.
148
output voltage; otherwise, if the output power decreases,
that means it works on the right of the maximum power
point, the disturbance direction will be away from the
maximum power point, thus it should change the distur-
bance direction to decrease the output voltage of photo-
voltaic array. When the cycle is complete the system is
adjust, so finally, the maximum power point will be
found [14].
3.2. Charge and Discharge Controllers
Charge controller, through the information received by
the management control, sends the energy that comes
from the photovoltaic array, to the fully discharged bat-
tery bank. During the charge process, charge controller
measures the flow of incoming energy in the battery bank.
When the battery bank is completely charged, the energy
flow is sent to another fully discharged battery bank. In
the eventuality that there are no fully discharged battery
banks the energy flow is sent to the loads through the
discharge controller; in alternative, the energy flow is
sent to the grid if it is connected. The discharge control
carries to discharge fully a single battery bank at a time.
During the discharge process the discharge control
measures the energy flow and management control com-
pares this with one memorized during the preceding
charge. Through this comparison is possible to establish
the aging of the battery and to determine the real storable
energy.
3.3. Management Control
The principal assignment of the management control
system is to determine the real available energy for the
navigation and to furnish information on the ship auton-
omy. To realize this assignment, the system preserves
information of the flows of energy and manages the
complete discharge/charge of the battery banks.
The performances of all electrical systems are moni-
tored by the management control. It manages the dis-
charge of the single battery bank one at a time. With this
management strategy we check the battery life and limit
the number of charge/discharge. In our system, the sizing
of battery capacity has been select in such a way that,
with an opportune control, at most only one cycle of
charge/discharge could be done during the navigation.
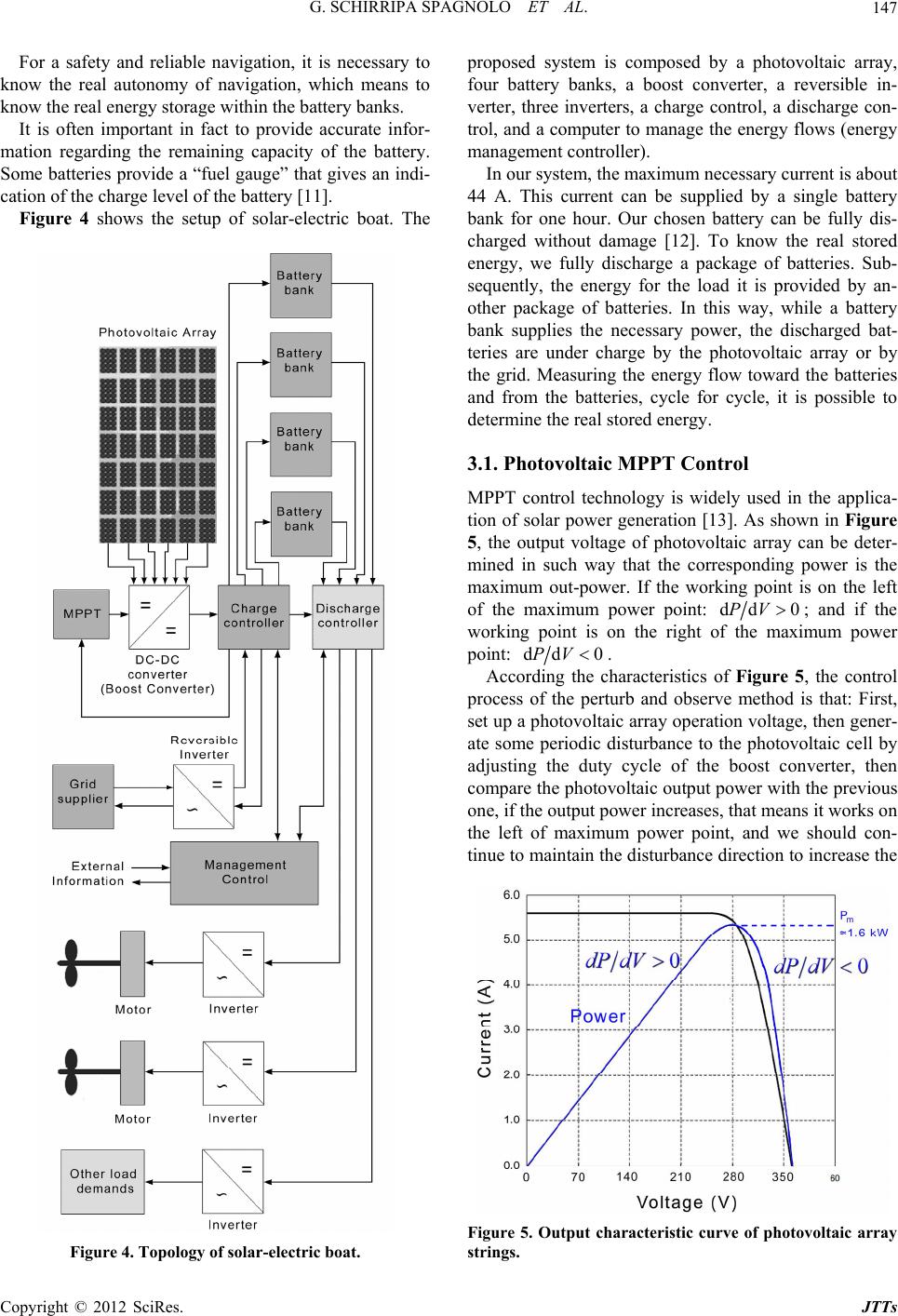
Considering that our batteries bear 2000 complete dis-
charges with a loss within the 20% (see Figure 3), the
time life of the batteries will be greater than 10 years.
4. Conclusions
The design of a Solar-Electric Boat for tourists’ transport
along the coast, in the rivers, in the lakes has been pre-
sented. With our system, it is possible to replace the
standard fuel engine with an electric one, by accepting a
loss in power, and without changing the weight and the
dimension of the boat.
Our boat has greater price in comparison to an equiva-
lent boat equipped with traditional propulsion. Currently
to manufacture a solar-electric boat there are extra cost
due to photovoltaic plant, battery bank and management
control system. These additional costs are partially com-
pensated by reduction of operation costs; in solar-electric
boat there is no consumption of fuel and the costs of
maintenances are relatively lower. In our boat, the initial
additional cost is about of 50,000$. On the other hand,
the annual saving on the exercise is estimable in 5000$;
within ten years the extras costs are amortized. Besides,
the great advantage of the use of renewable energy pro-
duces indirect socio-economic advantages; ecosystem
preservation, reduction of CO2, NOx and SOx emission,
etc.
In this paper we have proposed an innovative man-
agement of charge/discharge for battery. With this man-
agement, we have optimized the batteries life, and during
the navigation we have a real time control of the naviga-
tion autonomy. Besides we have designed ship with zero
pollution and very low running costs; all the necessary
energy for the navigation has origin by renewable.
Electricity produced by photovoltaic is safer and more
environmentally benign than conventional sources of
energy production. However, there is environmental,
safety, and health issues associated with manufacturing,
using, and disposing of photovoltaic equipment. The
manufacturing of electronic equipment is energy inten-
sive.
The electricity produced is higher than the one neces-
sary to manufacture the photovoltaic modules and the
energy break-even point is usually reached in a period
from three to six years.
REFERENCES
[1] M. Wyman, J. R. Barborak, N. Inamdar and T. “Stein, Best
Practices for Tourism Concessions in Protected Areas: A
Review of the Field,” Forests, Vol. 2, No. 4, 2011, pp.
913-928. doi:10.3390/f2040913
[2] J. Davenport and J. L. Davenport, “The Impact of Tour-
ism and Personal Leisure Transport on Coastal Environ-
ments: A Review Estuarine,” Coastal and Shelf Science,
Vol. 67, No. 1-2, 2006, pp. 280-292.
doi:10.1016/j.ecss.2005.11.026
[3] J. L. F. Soto, R. G. Seijo, J. A. Formoso, G. Iglesias and L.
C. Couce, “Alternative Sources of Energy in Shipping,”
Journal of Navigation, Vol. 63, No. 1-2, 2010, pp. 435-
448. doi:10.1017/S0373463310000111
[4] K. Hochkirch and V. Bertram, “Options for Fuel Saving
for Ships,” Mare Forum 2010: Maritime Transportation
of Energy, Houston, 19 February 2010.
[5] G. Schirripa. Spagnolo, D. Papalillo and A. Martocchia,
Copyright © 2012 SciRes. JTTs