Paper Menu >>
Journal Menu >>
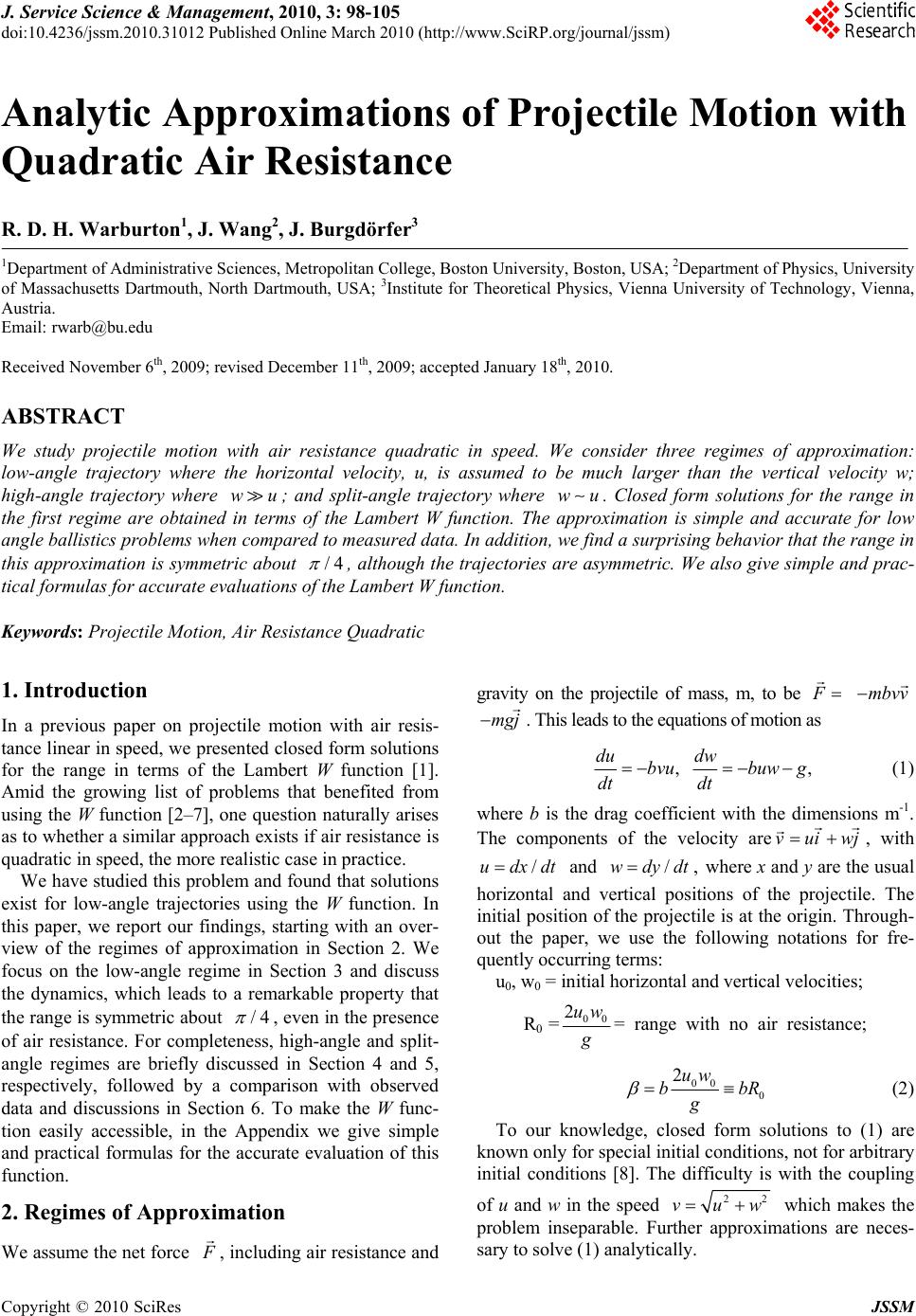 J. Service Science & Management, 2010, 3: 98-105 doi:10.4236/jssm.2010.31012 Published Online March 2010 (http://www.SciRP.org/journal/jssm) Copyright © 2010 SciRes JSSM Analytic Approximations of Projectile Motion with Quadratic Air Resistance R. D. H. Warburton1, J. Wang2, J. Burgdörfer3 1Department of Administrative Sciences, Metropolitan College, Boston University, Boston, USA; 2Department of Physics, University of Massachusetts Dartmouth, North Dartmouth, USA; 3Institute for Theoretical Physics, Vienna University of Technology, Vienna, Austria. Email: rwarb@bu.edu Received November 6th, 2009; revised December 11th, 2009; accepted January 18th, 2010. ABSTRACT We study projectile motion with air resistance quadratic in speed. We consider three regimes of approximation: low-angle trajectory where the horizontal velocity, u, is assumed to be much larger than the vertical velocity w; high-angle trajectory where wu; and split-angle trajectory where wu. Closed form solutions for the range in the first regime are obtained in terms of the Lambert W function. The approximation is simple and accurate for low angle ballistics p roblems when compared to measured data. In additio n, we find a su rprising b ehavior tha t the ra nge in this approximation is symmetric a bout /4 , although the trajectories are asymmetric. We also give simple and prac- tical formulas for accurate evaluations of the Lambert W function. Keywords: Projectile Motion, Air Resistance Quadratic 1. Introduction In a previous paper on projectile motion with air resis- tance linear in speed, we presented closed form solutions for the range in terms of the Lambert W function [1]. Amid the growing list of problems that benefited from using the W function [2–7], one question naturally arises as to whether a similar approach exists if air resistance is quadratic in speed, the more realistic case in practice. We have studied this prob lem and found that solutions exist for low-angle trajectories using the W function. In this paper, we report our findings, starting with an over- view of the regimes of approximation in Section 2. We focus on the low-angle regime in Section 3 and discuss the dynamics, which leads to a remarkable property that the range is symmetric abou t /4 , even in the presence of air resistance. For completeness, high-angle and split- angle regimes are briefly discussed in Section 4 and 5, respectively, followed by a comparison with observed data and discussions in Section 6. To make the W func- tion easily accessible, in the Appendix we give simple and practical formulas for the accurate evaluation of this function. 2. Regimes of Approximation We assume the net force F , including air resistance and gravity on the projectile of mass, m, to be F mbvv mgj . This leads to the equations of motion as ,, du dw bvubuw g dt dt (1) where b is the drag coefficient with the dimensions m-1. The components of the velocity arevuiwj , with /udxdt and /wdydt , where x and y are the usual horizontal and vertical positions of the projectile. The initial position of the projectile is at the origin. Through- out the paper, we use the following notations for fre- quently occurring terms: u0, w0 = initial horizontal and vertical velocities; R0 =00 2uw g = range with no air resistance; 00 0 2uw bbR g (2) To our knowledge, closed form solutions to (1) are known only for special initial conditions, not for arbitrary initial conditions [8]. The difficulty is with the coupling of u and w in the speed 22 vuw which makes the problem inseparable. Further approximations are neces- sary to solve (1) analytically.  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 99 We consider three approximations aimed at linearizing the speed according to the relative magnitudes of u and w: low-angle trajectory (LAT) approximation,uw; high- angle trajectory (HAT) approximation, wu; and split-angle trajectory (SAT) approximation, uw, as, 22 , , 2 , uifuwLAT vuww ifwuHAT uorw ifuwSAT (3) Each of the approximations will be discussed below, with the emphasis on LAT that is important in practice and in ballistics. 3. Low-Angle Trajectory (LAT) Approximation 3.1 The Trajectory We assume in this case the horizontal velocity is on av- erage much greater than the vertical velocity, uw. This will be the case if the firing angle is small, a case also discussed by Parker [9]. Here the speed may be ap- proximated as vu according to (3), so that the equa- tions of motion in the LAT approximation are 2,. du dw bubuw g dt dt (4) One can solve for u first, after which w, x, and y can be obtained. Hereafter, we will omit non-essential interme- diate steps. The solutions may be verified by substitution into the equations of motion . The so lutions are 00 0 /2 1 ,,, 112 uwgt uw gtabu at at (5) 2 0 111 ln(1+ ),ln(1+ ). 242 g gt xatyw atgt baaa (6) Equation 6 gives the trajectory in t he LAT approximation. The trajectories computed from (6) are plotted in Fig- ure 1 for three angles: 20o, 45o, and 70o. The initial speed is 9.8 m/s for all angles. The drag coefficient is 1 0.1bm . For comparison, we also show the trajectory from ideal projectile motion with no air resistance and the tra- jectory from the solutions with the full 2 v air resistance, Equation 1. We will simply refer to the former as the ideal motion, and the latter as the fu ll solution. The full solution is carried out by numerically inte- grating the equations of motion with the full 2 v resis- tance (1), using the Runge-Kutta method. (The two curves labeled HAT and SAT in Figure 1 are discussed in Sections 4 and 5.) The agreement between the LAT approximation and the full solutio n is good at 20o (nearly indistinguishable in Figure 1(a)), and it becomes worse for larger angles. This is as expected since the assumption was that LAT is valid only at small angles. The range is much reduced compared to the ideal motion. Air resistance in troduces in the traj ec- tories a well-known backward-forward asymmetry. The ascending part of the trajectory is shallower and longer, and the descending part is steeper and shorter. Figure 1. The trajectories for an initial speed of 09.8m/sv and drag coefficient 1 0.1mb at three firing angles, 20o (a), 45o (b), and 70o (c). The labeled curves are (see text): Full (thick solid line) - the numerical solution with the full 2 v resistance; LAT (solid line); HAT (dashed line, see Sec- tion 4); SAT (dash-dotted line, see Section 5), Ideal (dotted line) - motion without air resistance  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 100 3.2 The Range and Height in Comparison with Measurements To find the range of the projectile we eliminate t from (6) to obtain 02 0 exp(2)1 . 24 gx g yw bx au a (7) The range, R, is the value of x when 0.y It satisfies 02 0 exp(2) 10. 24 gR g wbR au a (8) This is a transcendental equ ation that until now had been customarily solved numerically or graphically [9 ]. But as we reported [1], equatio ns of this typ e can also be solved analytically, with the results written in closed form in terms of the Lambert W function. The Lambert W function [10] is defined, for a given value z, as the (inverse) function satisfying exp .WzWz z (9) Our discussions below refer closely to the properties of this relatively “new” function. For readers unfamiliar with this function, we give a brief review in the Appen- dix. There the reader will also find some practical for- mulas for evaluating W. To solve for the range R in terms of W, (8) needs to be rearranged in the form of (9) such that the multiplicative prefactor to the exponential, Wz, is the same as the exponent. This can be achieved by following the steps in [1]. The result is 1111 2exp 2exp, 1111 bR bR (10) with defined in (2). We identify from (9) and (10) that 111 2,or , 121 11 exp 11 Wz bRRWz b z (11) This is the closed form expression for the range, R, in the LAT approximation. The height, H, can be obtained by maximizing y in (7), and is given by 0 0 1ln 1+1 . 2 w Hbu (12) We compare in Table 1 measured range and height data with calculations from Equations 11 and 12 for fir- ing angles less than one degree. (The details of the cal- culations are given in the next subsection.) Table 1 shows that the measured data [11] and the cal- culations agree well once the firing angle is above about 10 minutes of arc. The discrepancy between measure- ment and theory is due to the uncertainty in the value b (see Table 1 caption), and not the approximation itself. Because the largest angle is still less than 1, higher order corrections are negligible. The relative error for the height is usually much larger than the relative error for the range. This is probably due to the difficulty in accu- rately measuring the relatively small height in this case. The large errors in height and in range at the two small- est angles need not cause concern. It is due to the combi- nation of exceeding difficulty in determining the small angle and the small height at the same time. Note that the diameter of the projectile and the height are of the same order of magnitude here. Overall, this example shows that if a reasonable b can be obtained, the LAT approximation should work well for low angle ballistics problems. 3.3 Analytic Properties of the Range 3.3.1 The Symmetry of Range in Firing Angle The analytic Formula 11 enables us to immediately draw several surprising conclusions on the general properties of the range, R. Since z is a function of which depends on the product 00 0 2uw sin (0 is the firing angle), we conclude that i) the range R is symmetric about /4 , that is to say, two firing angles 1 and 2 will lead to the same range if 11 /2 (see the LAT curves in Table 1. Measured and calculated results for a projectile of mass m = 9.7 g, diameter d = 0.76 cm, and muzzle velocity 823 m/ s. The measured data are taken from [11]. Results are calculated from the LAT approximation (11,12). The drag coefficient b = 1.05x10-3 m-1 is determined from 2/bCd m , where C = 0.15 is the recommended value [11], and = 1.2 kg/m3 is the air density Firing Angle (min) 2 5 8 12 16 20 26 33 40 49 Measured 91 183 274 366 457 549 640 732 823 914 Calculated 76 177 265 367 456 534 636 738 826 923 Range, R (m) Error, % 16 3.3 3.3 0.27 0.22 2.7 0.63 0.82 0.36 0.98 Measured 0.02 0.1 0.19 0.33 0.61 1.0 1.5 2.3 3.2 4.5 Calculated 0.011 0.068 0.17 0.36 0.62 0.93 1.5 2.3 3.2 4.5 Height (m) Error, % 45 32 11 9.1 1.6 7.0 0.0 9.5 3.2 2.2  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 101 Figures 1(a) and (c)); and ii) because W(z) is a mono- tonic function, the maximum range occurs at /4 [12]. Remarkably, these properties i) and ii) with air resistance in the LAT approximation are exactly the same as for ideal projectile motion without air resistance. Given initial conditions 0 u and 0 w, the range, R, can be computed from (11). Since z is negative and W(z) is multi-valued (see Appendix) for 0z<, we have a choice of the branches 0 W or 1 W. Comparing z in (11) and (9) we identify one trivial solution, namely the pri- mary branch, 01 1 Wz (13) This solution, although mathematically correct, is un- physical because it gives a zero range when substituted into (11). The physical choice must be 1 W. We note that for linear resistance [1] the choices were the opposite, where 0 W was the physical solution and 1 W the un- physical one. The range, R, calculated from (11) using 1 W is shown in Figure 2 as a function of the firing angle. It clearly demonstrates that R is symmetric about, and maximum at, /4 . Also shown in Figure 2, for com- parison, are the ranges for ideal projectile motion with no air resistance and with the full 2 v resistance. Unlike the LAT case, the range of the full solution in Figure 2 is not symmetric about /4 . It reaches maxi- mum at an angle below /4 , a fact that is well known. Figure 2. The range of projectile motion as a function of the firing angle 0 . The initial speed is 0 v= 9.8 m/s and the drag coefficient is b = 0.1 m-1. The LAT approximation (solid line) is maximum at and symmetric about /4 , as is the ideal motion (dash-dotted line). The range with the full 2 v resistance (dashed line) peaks before/4 , and is asymmetric The LAT range is in good agreement with the full solu- tion for low firing angles as expected, up to around /6 . Compared to the ideal case, the maximum ranges in the LAT and the full solutions are substantially re- duced, by about 40% for this particular set of parameters. We note that the LAT approximation produces asym- metric trajectories (Figure 1) but symmetric ranges. The physical reason can be traced to two factors influencing the range: the time of flight and the average horizontal velocity, as discussed below. 3.3.2 The Time of Flight and the Average Velocity The average horizontal velocity, u, and the time of flight, T, are related by .RuT (14) The time of flight T can be obtained from (6) by set- ting x R , at tT . Together with (11), this gives 00 exp111 1 exp1 . 21 bR TWz bu bu (15) The average horizontal velocity can be expressed from (14) and (15) as 1 0111 1exp1 . 21 21 u uWz Wz (16) Quantitatively, as the firing angle increases, the time of flight T increases, but the average horizontal velocity u decreases. However, before/4 , the increase in T is more than the decrease in u so that the range as governed by (14), increases. After /4 , however, the opposite happens so that the range decreases. The sym- metric range is a result of the balance between T and u. 3.3.3 The Range for Small and Large Air Resistance In the limit of small air resistance, 0b, the dimen- sionless parameter will be small, 0 . The argu- ment z to the W in (11) approaches 1/ze , and 1Wz (see Appendix). Using the properties of W(z) and after some algebra (we leave the details as an exercise to the interested reader), the first order correc- tion to the range, R, in (9) is 000 22 11,0, 33 RRRbR b (17) where 0 R is the range of ideal projectile motion, 0b . For large air resistance, 1b and 1 . As , 1/z according to (11). Using the as-  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 102 ymptotic expressions for 10ln/Wz zlnz (see Appendix), we have from (11) 0ln with ,1. 2 ln R Rb (18) It is interesting to compare the scaling behavior with our earlier study [1] for linear resistance, where we found the range to scale as 1/b, the inverse of the resistance. For quadratic resistance, (18) indicates ln ln/Rbbb. This shows that the logarithm term is characteristic of the quadratic resistance. 4. High-Angle Trajectory (HAT) Approximation When the firing angle is large (close to /2 ), we ex- pect that, on average, the vertical velocity w will be much larger than the horizontal velocity, wu. The speed is approximated as vw from (3). The equa- tions of motion in the HAT approximation are ,. du dw bwubwwg dt dt (19) The solutions are broken into two parts because of |w|. In the ascending part of the trajectory, the solutions are 0cos ,tan,. cos ug uw bg tb (20) 0cos ln tantan 42 242 u x 10 1Incos/ cos,withtan/.yt bgw b (21) The time it takes to reach the top is /t . With the values of u, w, x, y in (20,21) at the top as the initial con- dition for the descending trajectory, the solutions for de- scent are exp1 exp2 0cos ,, 1exp 21exp 2 g uuw b (22) 1 0 2 0 cos tanlntan/2 44 21 / 1ln . 1exp 2 t u xe bg yb (23) The time starts from zero (at the top) in (22, 23). The trajectories in the HAT approximation are shown in Figure 1 The best agreement with the full solution is seen at the highest angle 70o, consistent with the under- lying assumptions. We note that the agreement is consid- erably worse descending than ascending (Figure 1, 70o (c)). The reason is that near the top, 0w, and the va- lidity of the HAT approximation breaks down, causing the large discrepancy while falling back down. By con- trast, the LAT approximation (Figure 1, 20o (a)) is valid globally as long as the firing angle is small, giving a much better agreement on both parts of the trajectory. 5. Split-Angle Trajectory (SAT) Approximation In Sections 3 and 4 we discussed low and high angle tra- jectories. To be complete, we consider in this section the split angle /4 , between the LAT and HAT ap- proximations. We assume uw . and take the symmet- ric approach: setting 2vu in the horizontal direc- tion and 2vw in the vertical direction. The equa- tions of motion read 2 2,2 . du dw bubw wg dt dt (24) Note that upon replacing 2bb in (24), /dudt is the same as that in (4) of LAT, and /dwdt is the same as that in (19) of HAT. The solutions for u, x will be the same as those in (5,6), and the solutions for w, y will be the same as for w, y in (21,23), so they will not be repeated here. Similarly, the trajectories can be computed as before (with b replaced by 2b, of course). They are also shown in Figure 1 at the same angles with the same pa- rameters. Here, we see the best agreement with the full solution at 45o as it should. But, unlike the LAT or HAT curves, where after certain point in time (just before reaching the top) the differences keep increasing, the SAT curve crosses the full solution during the course of motion. This is due to the balance of the horizontal and vertical resistance forces. Because of this balance, the SAT behaviors are inter- estingly different at low versus high angles. At 20o (Fig- ure 1(a)), the SAT curve is “squeezed” horizontally in comparison with the full solution, resulting in a shorter range and a higher height. This is because for low angles where uw>, the horizontal resistance is over-estimated in the equations of motion (24). Conversely, at 70o (Fig- ure 1(c)), the SAT curve is compressed vertically, caus- ing a lower height but a longer range. The reason is similarly due to the over-estimation of the resistance in the vertical direction. As a result, curve crossing occurs. 6. Conclusions In summary, we have presented a detailed discussion of projectile motion with quadratic air resistance in three approximations. Our focus was on the low-angle trajec-  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 103 tory approximation where we found closed form solu- tions for the range and the time of flight in terms of the secondary branch of the Lambert W function, 1 W . The approximation is simple and accurate for low angle bal- listics problems. Various analytic properties were readily analyzed with these solutions. Together with projectile motion with linear air resistance [1,5], the example studied here serves two educational purposes: i) It is possible to in- troduce the use of special functions in physics at early undergraduate levels in a familiar, more realistic problem; and ii) It represents a good complimentary case where the physical solution requ ir ed the seco nd ar y b ran ch , 1 W , rather than the principal branch 0 W as in the case of linear air resistance. One interesting and closely-related question remains open, i.e., whether both branches of W might be required simultaneously in a physical solution, say when the air resistance contains both linear and quadratic terms, 2 av bv , under some forms of approximation, pre- sumably. REFERENCES [1] R. D. H. Warburton and J. Wang, “Analysis of asymp- totic projectile motion with air resistance using the Lam- bert W function,” American Journal of Physics, Vol. 72, pp. 1404–1407, 2004. [2] S. R. Valluri, D. J. Jeffrey, and R. M. Corless, “Some applications of the Lambert W functions to physics,” Ca- nadian Journal of Physics, Vol. 78, pp. 823–830, 2000. [3] S. R. Cranmer, “New views of the solar wind with the Lambert W function,” American Journal of Physics, Vol. 72, pp. 1397–1403, 2004. [4] D. Razansky, P. D. Einziger, and D. R. Adam, “Optimal dispersion relations for enhanced electromagnetic power deposition in dissipative slabs,” Physical Review Letters, Vol. 93, 083902, 2004. [5] S. M. Stewart, Letters to the Editor, American Journal of Physics, Vol. 73, pp. 199, 2005. “A little introductory and intermediate physics with the Lambert W function,” Pro- ceedings of 16th Australian Institute of Physics, Vol. 005, pp. 194–197, 2005. [6] E. Lutz, “Analytical results for a Fokker-Planck equation in the small noise limit,” American Journal of Physics, Vol. 73, pp. 968–972, 2005. [7] P. Hövel and E. Schöll, “Control of unstable steady states by time-delayed feedback methods,” Physical Review E, Vol. 72, 046203, 2005. [8] There is a solution presented in terms of the slope an- gle by A. Tan, C. H. Frick, and O. Castillo, “The fly ball trajectory: An older approach revisited,” American Journal of Physics, Vol. 55, pp. 37–40, 1987. But the slope angle is unknown except at the top (zero) of the trajectory, and can be found only numerically or graphically. Therefore, the solution is not in closed form. [9] G. W. Parker, “Projectile motion with air resistance quadratic in the speed,” American Journal of Physics, Vol. 45, pp. 606–610, 1977. [10] R. M. Corless, G. H. Gonnet, D. E. G. Hare, D. J. Jeffrey, and D. E. Knuth, “On the Lambert W function,” Ad- vances in Computational Mathematics, Vol. 5, pp. 329–359, 1996. [11] H. R. Kemp, “Trajectories of projectile motion in air for small times of flight,” American Journal of Physics, Vol. 55, pp. 1099–1102, 1987. [12] T he a n gl e m axim izing t he range can be derived directly by 0 0 dR d , from [1], yielding 0 1cos 20 1 Wz . This implies either 10 1 Wz , the trivial un- physical solution, (13); or 0 cos 20 , i.e., 0/4 . [13] B. Hayes, “Why W?” American Science, Vol. 93, pp. 104–108, 2005. [14] J. Wang, To be published. [15] M. Abramowitz and I. A. Stegun, “Handbook of mathe- matical functions,” Dover, New York, pp. 18, 1970.  Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 104 Appendix 1. The Lambert W function In this appendix, we briefly summarize some relevant elements of the Lambert W function. The reader can find an extensive review in [10]. In lieu of the growing inter- est in this function in the physics community [2–7], we also present several practical formulas for the evaluation of the W function. The Lambert W function as defined by (9) is generally complex-valued. For our purpose we are interested in the real-valued W(x), namely the principal branch 0 W, and the secondary branch 1 W. The two branches are shown in Figure 3. The be havio rs of 0 W and 1 W for small and large x are 2 01 0 00ln,ln. ln ln x x Wxxx WxWx x x (A.1) 2. Evaluation of W During the course of our study, we were unable to find in the literature simple and practical algebraic expressions for evaluating W over the whole range, and for embed- ding it in our code. We therefore devised several readily usable approximate formulas given here for this purpose. It should give the interested reader a good starting point in using this function. W is not (yet) available on a calculator like some ele- mentary functions. It is debatable whether it should be elevated to the status of an elementary function. (See [13] for an enchanting account.) However, one can easily im- plement it on a programmable calculator with the formu- las given here. The accuracy is at least 8 digits, in fact it is usually much better. Figure 3. The Lambert W function for real argument x. The two real branches are the principal branch 0 W (solid line), and the secondary branch 1 W (dashed line). The branch point is at 1 x e where 1W 1) W in the Regular Regions We first give the formulas optimized in the regular re- gions. Owing to space limitations, we will explain the methods used elsewhere [14]. The general form of the expressions is 0, 1rWxCrP (A.2) where C is a constant and rP is the Padé approxi- mant defined as 234 01 234 234 123 4 r. 1 aarararar Pbr brbrbr (A.3) The expansion variable, r, is related to the independent variable, x. We give in Table 2 the constant C, the vari- able r, and the coefficients i a andi b. To utilize the ta- ble, locate which function and region to use, then evalu- ate (A.2) with the corresponding C, r, i a, and i b. 2) W in the Asymptotic Regions Both 0 W and 1 W have the same form in the asymp- totic regions 2234 0, 11234 2 2 12 3 23 4 1, ln / ln,ln , ln 1 1/ 2,12/6,186/ 24, 1 225824/120. Wxqqqrarararar pq xx pqr xpq aaqaqq aqqq (A.4) This expression (A.4) should be used for 0 W in the re- gion 2.2,x and for 1 W in 0.12,x . Note that it is the subtle difference in p, namely, ln/ ln x x for 0 W and ln/ln- x x for 1 W that automatically selects the correct branch. 3) W with a Little Programming If the reader wishes to calculate W with arbitrary preci- sion, one can use Newton’s rule [15] which, for a given x, is the root, w, to exp 0fwwwx . The root- finding process is as follows: Starting with an initial guess, 1 w, the successive iterations, n w, approach rap- idly to the true value as 2 1 exp ,1,2,3... 1 nn n n wxw wn w (A.5) It only remains to determine the initial guess, 1 w. One way to choose 1 w is 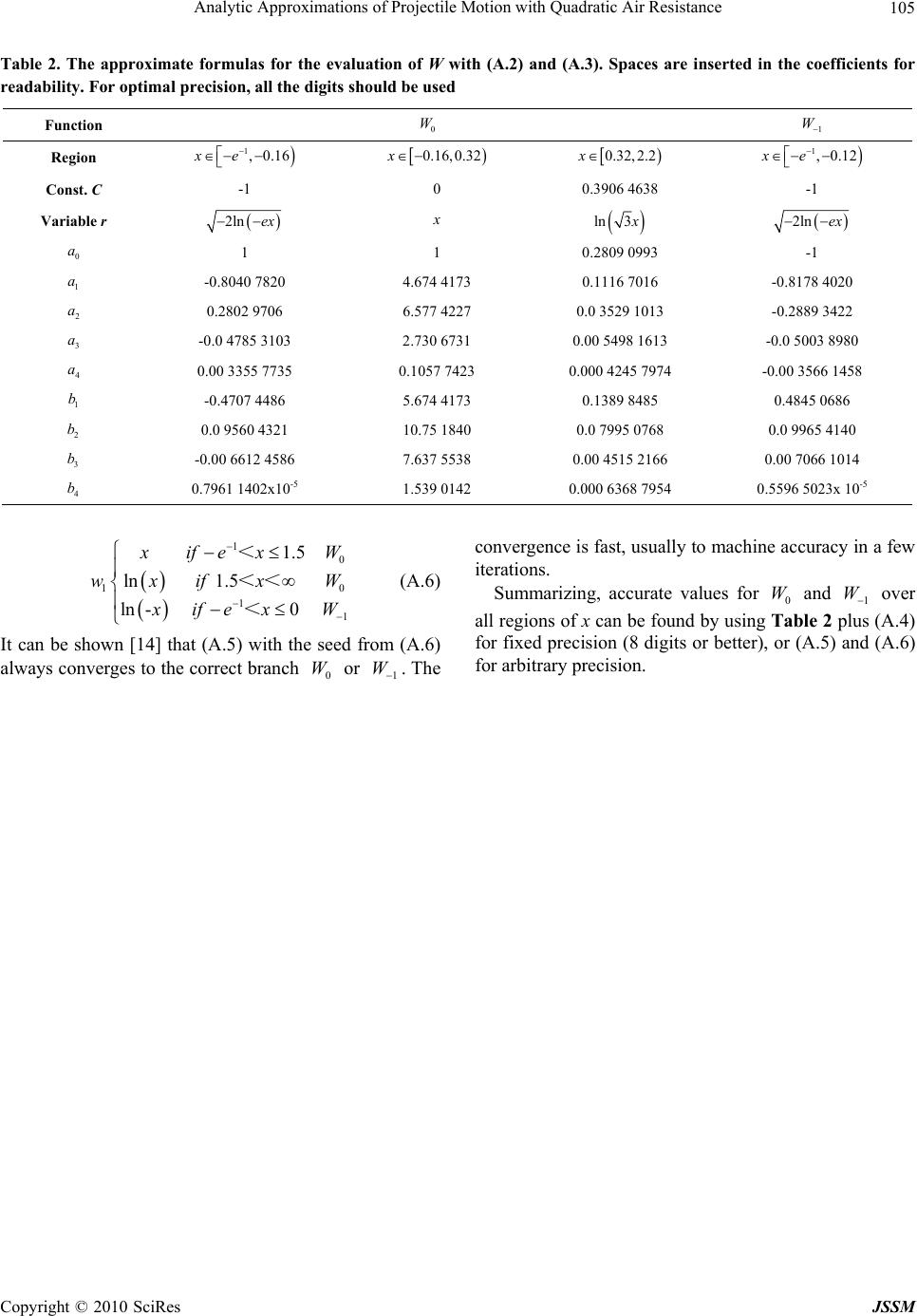 Analytic Approximations of Projectile Motion with Quadratic Air Resistance Copyright © 2010 SciRes JSSM 105 Table 2. The approximate formulas for the evaluation of W with (A.2) and (A.3). Spaces are inserted in the coefficients for readability. For optimal precision, all the digits should be used Function 0 W 1 W Region 1,0.16xe 0.16,0.32x 0.32,2.2x 1,0.12xe Const. C -1 0 0.3906 4638 -1 Variable r 2ln ex x ln 3 x 2ln ex 0 a 1 1 0.2809 0993 -1 1 a -0.8040 7820 4.674 4173 0.1116 7016 -0.8178 4020 2 a 0.2802 9706 6.577 4227 0.0 3529 1013 -0.2889 3422 3 a -0.0 4785 3103 2.730 6731 0. 00 5498 1613 -0.0 5003 8980 4 a 0.00 3355 7735 0.1057 7423 0.000 4245 7974 -0.00 3566 1458 1 b -0.4707 4486 5.674 4173 0.1389 8485 0.4845 0686 2 b 0.0 9560 4321 10.75 184 0 0.0 7995 0768 0.0 9965 4140 3 b -0.00 6612 4586 7 .637 5538 0.00 4515 2166 0.00 7066 1014 4 b 0.7961 1402x10-5 1.539 0142 0.000 6368 7954 0.5596 5023x 10-5 10 10 11 1.5 ln 1.5 ln -0 x if exW wxif xW x if exW < << < (A.6) It can be shown [14] that (A.5) with the seed from (A.6) always converges to the correct branch 0 W or 1 W . Th e convergence is fast, usually to machine accuracy in a few iterations. Summarizing, accurate values for 0 W and 1 W over all regions of x can be found by using Table 2 plus (A.4) for fixed precision (8 digits or better), or (A.5) and (A.6) for arbitrary precision. |