Journal of Applied Mathematics and Physics
Vol.04 No.01(2016), Article ID:63080,13 pages
10.4236/jamp.2016.41019
Error Analysis of ERM Algorithm with Unbounded and Non-Identical Sampling*
Weilin Nie, Cheng Wang#
Department of Mathematics, Huizhou University, Huizhou, China

Copyright © 2016 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 9 November 2015; accepted 24 January 2016; published 27 January 2016
ABSTRACT
A standard assumption in the literature of learning theory is the samples which are drawn independently from an identical distribution with a uniform bounded output. This excludes the common case with Gaussian distribution. In this paper we extend these assumptions to a general case. To be precise, samples are drawn from a sequence of unbounded and non-identical probability distributions. By drift error analysis and Bennett inequality for the unbounded random variables, we derive a satisfactory learning rate for the ERM algorithm.
Keywords:
Learning Theory, ERM, Non-Identical, Unbounded Sampling, Covering Number

1. Introduction
In learning theory we study the problem of looking for a function or its approximation which reflects the relationship between the input and the output via samples. It can be considered as a mathematical analysis of artificial intelligence or machine learning. Since the exact distributions of the samples are usually unknown, we can only construct algorithms based on an empirical sample set. A typical setting of learning theory in mathe- matics can be like this: the input space X is a compact metric space, and the output space  for regression. (When
for regression. (When ,it can be regarded as a binary classification problem.) Then
,it can be regarded as a binary classification problem.) Then  is the whole sample space. We assume a distribution
is the whole sample space. We assume a distribution  on Z, which can be decomposed to two parts: marginal distribution
on Z, which can be decomposed to two parts: marginal distribution  on X and conditional distribution
on X and conditional distribution  given some
given some . This implies
. This implies

for any integrable function  [1] .
[1] .
To evaluate the efficiency of a function  we can choose the generalization error:
we can choose the generalization error:

Here  is a loss function which measures the difference between the prediction
is a loss function which measures the difference between the prediction  via f and the actual output y. It can be hinge loss in SVM (support vector machine) or pinball loss in quantile learning and etc.. In this paper we focus on the classical least square loss
via f and the actual output y. It can be hinge loss in SVM (support vector machine) or pinball loss in quantile learning and etc.. In this paper we focus on the classical least square loss  for simplicity. [2] shows that
for simplicity. [2] shows that
 (1)
(1)
From this we can see the regression function
is our goal minimizing the generalization error. The empirical risk minimization (ERM) algorithm aims to find a function which approximates the goal function  well. While
well. While  is always unknown beforehand, a sample set
is always unknown beforehand, a sample set  is accessible. Then ERM algorithm can be described as
is accessible. Then ERM algorithm can be described as
where function space  is the hypothesis space which will be chosen to be a compact subset of
is the hypothesis space which will be chosen to be a compact subset of .
.
Then the error produced by ERM algorithm is . We expect it is close to the optimal one
. We expect it is close to the optimal one , which means the excess generalization error
, which means the excess generalization error  should be small, while the sample size m tends to infinity.
should be small, while the sample size m tends to infinity.
Dependent sampling has considered in some literature such as [3] for concentration inequality and [4] [5] for learning. More recently, in [6] and [7] , the authors studied learning with non-identical sampling and dependent sampling, and obtained satisfactory learning rates.
In this paper we concentrate on the non-identical setting that each sample  is drawn according to a different distribution
is drawn according to a different distribution  on Z. And each
on Z. And each  can also be decomposed to marginal distribution
can also be decomposed to marginal distribution  and conditional distribution
and conditional distribution . Assume they are elements of
. Assume they are elements of  and
and  respectively, where
respectively, where  and
and  are Hölder spaces with
are Hölder spaces with . Hölder spaces
. Hölder spaces  is the set of continuous functions with finite norm
is the set of continuous functions with finite norm

where
We assume a polynomial convergence condition for both sequences  and
and , i.e., there exist
, i.e., there exist  and
and , such that
, such that
 (2)
(2)
 (3)
(3)
Power index b measures quantitatively differences between the non-identical setting and the i.i.d. case. The distributions are more similar as b is larger, and when  it is indeed i.i.d. sampling, i.e.
it is indeed i.i.d. sampling, i.e.  and
and  for any
for any . The following example is taken from [8] .
. The following example is taken from [8] .
Example 1. Let  be a sequence of bounded functions on X such that
be a sequence of bounded functions on X such that . Then the sequence
. Then the sequence  defined by
defined by  satisfies (2) for any
satisfies (2) for any .
.
On the other hand, most literature assume the output space is uniformly bounded, that is,  for some positive constant M and almost surely with respect to
for some positive constant M and almost surely with respect to . A typical kernel dependent result for the least-squares regularization algorithm under this assumption is [9] . There the authors get a learning rate close to 1 under some capacity condition for the hypothesis space. However, the most common distribution-Gaussian distribution is not bounded. This requirement is from the bounded condition in Bernstein inequality and limits the application of algorithms. In [10] - [13] , some unbounded conditions for the output space are discussed in different forms, which extends the classical bounded condition. Here we will follow the latter one which is more generalized and simple in expression, and this is the second novelty of this paper. We assume the moment incremental condition for the output space, an extension of that we proposed in [11] :
. A typical kernel dependent result for the least-squares regularization algorithm under this assumption is [9] . There the authors get a learning rate close to 1 under some capacity condition for the hypothesis space. However, the most common distribution-Gaussian distribution is not bounded. This requirement is from the bounded condition in Bernstein inequality and limits the application of algorithms. In [10] - [13] , some unbounded conditions for the output space are discussed in different forms, which extends the classical bounded condition. Here we will follow the latter one which is more generalized and simple in expression, and this is the second novelty of this paper. We assume the moment incremental condition for the output space, an extension of that we proposed in [11] :
 (4)
(4)
and
 (5)
(5)
We can see the Gaussian distribution satisfies this setting.
Example 2. Let  and
and . If for each
. If for each  and the condition distribution
and the condition distribution  is a normal distribution with variance
is a normal distribution with variance  bounded by
bounded by , then (4) is satisfied with
, then (4) is satisfied with  and
and .
.
Next we need to introduce the covering number and interpolation space.
Definition 1. The covering number  for a subset
for a subset  of
of  and
and  is defined to be the minimal integer N such that there exist N balls with radius
is defined to be the minimal integer N such that there exist N balls with radius  covering
covering .
.
Let the hypothesis space , be a compact Banach space with inclusion
, be a compact Banach space with inclusion  bounded and compact. We follow the assumption [14] [15] that there exist some constants
bounded and compact. We follow the assumption [14] [15] that there exist some constants  and
and , such that the hypothesis space satisfies the capacity condition
, such that the hypothesis space satisfies the capacity condition
 (6)
(6)
where . Capacity condition describes the amount of functions in the hypothesis space.
. Capacity condition describes the amount of functions in the hypothesis space.
The sample error will decrease but approximation error will increase when covering number of H is larger (or simply say H is larger). So how to choose an appropriate hypothesis space is the key problem of ERM algorithm. We will demonstrate this in our main theorem.
Definition 2. The interpolation space  is a function space consists of
is a function space consists of  with norm
with norm
where  is the K-functional defined as
is the K-functional defined as

Interpolation space is used to characterize the position of the regression function, and it is related with the approximation error. Now we can state our main result as follow.
Theorem 1. If  with bounded inclusion
with bounded inclusion , and satisfies (6) with r,
, and satisfies (6) with r,  ,
,  for some
for some , the sample distribution satisfies (2), (3) for some
, the sample distribution satisfies (2), (3) for some  and
and , (4) and (5). For any
, (4) and (5). For any , choose the hypothesis space
, choose the hypothesis space  to be the ball of H centered at 0 with radius
to be the ball of H centered at 0 with radius , where
, where  and
and
Moreover, we assume all functions in H and  are Hölder continuous of order s, i.e., there is a constant
are Hölder continuous of order s, i.e., there is a constant , such that
, such that
 (7)
(7)
Then for any , with confidence at least
, with confidence at least , we have
, we have

Here  is a constant independent with m and
is a constant independent with m and .
.
Remark 1. In [6] , the authors pointed out that if we choose the hypothesis space to be the reproducing kernel Hilbert space (RKHS)  on
on , and the kernel
, and the kernel , then our assumption (7) will hold true. In particular, if the kernel is chosen to be Gaussian kernel
, then our assumption (7) will hold true. In particular, if the kernel is chosen to be Gaussian kernel , then (7) holds for any
, then (7) holds for any . [16] discussed this in detail.
. [16] discussed this in detail.
In all, we extend the polynomial convergence condition on the conditional distribution sequense and accordingly, set the moment inremental condition for the sequence in the least squares ERM algorithm. By error decomposition, truncate technique and unbounded concentration inequality, we can finally obtain the total error bound Theorem 1.
Compared with the non-identical settings in [6] and [17] , our setting is more general since the conditional distribution sequence  is also a polynomially convergence sequence, but not identical as in their settings. This together with unbounded y lead to the main difficulty for the error analysis in this paper.
is also a polynomially convergence sequence, but not identical as in their settings. This together with unbounded y lead to the main difficulty for the error analysis in this paper.
For the classical i.i.d. and bounded conditions, [9] indicates that  and kernel
and kernel  while
while , the rate of least square regularization algorithm is
, the rate of least square regularization algorithm is  for any
for any . [17] shows that
. [17] shows that
under some conditions on kernel, object function , exponential convergence condition for distribution sequence and choose some special parameters, the optimal rate of online learning algorithm is close to
, exponential convergence condition for distribution sequence and choose some special parameters, the optimal rate of online learning algorithm is close to
 . In [6] , the best case occurs when
. In [6] , the best case occurs when  and kernel
and kernel . The rate of least square regularization algorithm can be close to
. The rate of least square regularization algorithm can be close to . However, our result implicates that while
. However, our result implicates that while ,
, 
tends to 1 and  tends to 0, since p can be any integer, the learning rate can be arbitrarily close to
tends to 0, since p can be any integer, the learning rate can be arbitrarily close to , which is the same as in i.i.d. case [9] , and better than the former results with non-identical settings. With this result, we can extend the application of learning algorithm to more situations and still keep the best learning rate. The explicit expression of
, which is the same as in i.i.d. case [9] , and better than the former results with non-identical settings. With this result, we can extend the application of learning algorithm to more situations and still keep the best learning rate. The explicit expression of  in the theorem can be found through the proof of the theorem below.
in the theorem can be found through the proof of the theorem below.
2. Error Decomposition
Our aim, the error  is hard to bound directly, we need a transitional function for analyzing. By the compactness of
is hard to bound directly, we need a transitional function for analyzing. By the compactness of  and continuity of functional
and continuity of functional , we can denote
, we can denote
Then the generalization error can be written as

The first term on the right hand side is the sample error, and the second term  is called approximation error which is independent with samples. [18] analyzed the approximation error by approxi- mation theory. In the following we mainly study the sample error bound.
is called approximation error which is independent with samples. [18] analyzed the approximation error by approxi- mation theory. In the following we mainly study the sample error bound.
Now we break the sample error to some parts which can be bounded using truncate technique and unbounded concentration inequality. We refer the error decomposition  to [6] . Denote
to [6] . Denote
then  and we have
and we have
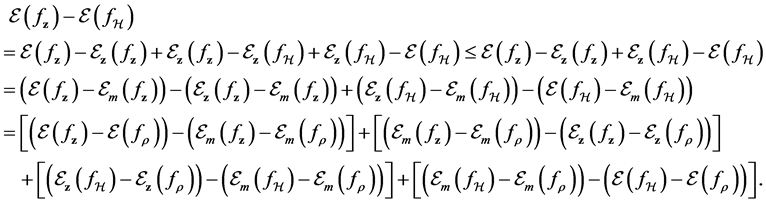
In the following, we call the first and fourth brackets drift errors, and the left sample errors. We will bound the two types of errors respectively in the following sections, and finally obtain the total error bounds.
3. Drift Errors
Firstly we consider the drift error involving  in this section.To avoid handling two polynomial convergence sequences simultaneously, we break the drift errors to two parts. Meanwhile, a truncate technique is used to deal with the unbounded assumption. Since
in this section.To avoid handling two polynomial convergence sequences simultaneously, we break the drift errors to two parts. Meanwhile, a truncate technique is used to deal with the unbounded assumption. Since  is a subset of
is a subset of , functions in
, functions in  is uniformly bounded. Then we have
is uniformly bounded. Then we have
Proposition 1. Assume  for some
for some , for any
, for any 

Proof. From the definition of  and
and , we know that
, we know that

Since , we can bound the first term inside the bracket as follow.
, we can bound the first term inside the bracket as follow.
But for any  and
and , there holds
, there holds
From (3.12) in [6] , we have
Then we can bound the sum of the first term as

Choose K to be , we have
, we have
For the second term, notice , and
, and  so
so
Therefore

Combining the two bounds, we have
And this is indeed the proposition.
For the drift error involving , we have the same result since
, we have the same result since  as well, i.e.,
as well, i.e.,
Proposition 2. Assume  for some
for some , for any
, for any , we have
, we have
4. Sample Error Estimate
We devote this section to the analysis of the sample errors. For the sample error term involving , we will use the Bennett inequality as in [11] and [19] , which is initially introduced in [20] . Since two polynomial convergence conditions are posed on the marginal and conditional distribution sequences, we have to modify the
, we will use the Bennett inequality as in [11] and [19] , which is initially introduced in [20] . Since two polynomial convergence conditions are posed on the marginal and conditional distribution sequences, we have to modify the
Bennett inequality to fit our setting. Denote  and
and  for an integrable function g, the lemma can be stated as follow.
for an integrable function g, the lemma can be stated as follow.
Lemma 1. Assume  holds for
holds for  and some constants
and some constants  , then we have
, then we have

For our non-identical setting, we can have a similar result from the same idea of proof. By denoting  and
and , the following lemma holds.
, the following lemma holds.
Lemma 2. Assume  and
and  for some constants
for some constants  and any
and any , then we have
, then we have

Now we can bound the sample error term  by applying this lemma.
by applying this lemma.
Proposition 3. Under the moment incremental condition (4), (5) and notations above, with probability at least , we have
, we have

where  and
and  is the approximation error.
is the approximation error.
Proof. Let
 , then
, then

Since , we have
, we have
for any , where 1and
, where 1and . In the same way, we have the following bounds
. In the same way, we have the following bounds

as well. Then from Lemma 2 above, we have

Set the right hand side to be , we can solve that
, we can solve that
Therefore with confidence at least , there holds
, there holds

This proves the proposition.
For the sample error term involving , analysis will be more involved since we need a concentration inequality for a set of functions. Firstly we have to introduce the ratio inequality [9] .
, analysis will be more involved since we need a concentration inequality for a set of functions. Firstly we have to introduce the ratio inequality [9] .
Lemma 3. Denote  for
for , which satisfies
, which satisfies  and
and  for some constants
for some constants  and
and , then we have
, then we have

Proof. Let  to be
to be  in the Lemma 2, from the proof of the last proposition, we can conclude that
in the Lemma 2, from the proof of the last proposition, we can conclude that
Note that  and the lemma is proved.
and the lemma is proved.
Then we have the following result.
Lemma 4. For a set of functions  with
with , construct functions
, construct functions  for
for , with confidence at least
, with confidence at least , we have
, we have

where  for any
for any 
Proof. Since  is an element of
is an element of , from Lemma 3 we have
, from Lemma 3 we have

then there holds

Set the right hand side to be  and we have with probability at least
and we have with probability at least ,
,
Here . And this proves the lemma.
. And this proves the lemma.
Now by a covering number argument we can bound the sample error term involving .
.
Proposition 4. If  for some
for some , where H satisfies the capacity condition, for any
, where H satisfies the capacity condition, for any , with confidence at least
, with confidence at least , there holds
, there holds

Proof. Denote  where
where  is to be determined, then we can find an
is to be determined, then we can find an  -net
-net  of
of , and there exist a function
, and there exist a function , we have
, we have

For the first term, since  for all
for all , we have
, we have
And for the third term,

we need to bound

Let  and then
and then

From Lemma 1 we have

Set the right hand side to be  and with confidence at least
and with confidence at least  we have
we have

And this means,

with probability at least .
.
The second term can be bounded by 4 above. That is, with confidence at least , we have
, we have

Since  by assumption, and
by assumption, and

combining the three parts above, we have the following bound with confidence at least ,
,
By choosing  for balancing, we have
for balancing, we have

with confidence at least , this proves the proposition.
, this proves the proposition.
5. Approximation Error and Total Error
Combining the results above, we can derive the error bound for the generalization error .
.
Proposition 5. Under the moment condition for the distribution of the sample and capacity condition for the hypothesis space , for any
, for any  and
and , with confidence at least
, with confidence at least , we have
, we have
where .
.
What is left to be determined in the proposition is the approximation error . By the choice of hypothesis space we can get our main result.
. By the choice of hypothesis space we can get our main result.
Proof of Theorem 1. Let
and , assume
, assume  without loss of generality, and
without loss of generality, and , Proposition 5 indicates that
, Proposition 5 indicates that

holds with confidence at least  for any
for any , where
, where  is a constant independent on m or
is a constant independent on m or .
.
For the approximation error , we can bound it by Theorem 3.1 of [18] . Since the hypothesis space
, we can bound it by Theorem 3.1 of [18] . Since the hypothesis space , and
, and  with
with , we have
, we have

The upper bound B is now chosen to be  since
since , then with confidence at least
, then with confidence at least ,
,

By choosing
we have

holds with confidence at least . Denote
. Denote , then the theorem is obtained.
, then the theorem is obtained.
6. Summary and Future Work
We investigate the least squares ERM algorithm with non-identical and unbounded sample, i.e., polynomial convergence for  and
and  and moment inremental condition for the latter ones. Analogue
and moment inremental condition for the latter ones. Analogue
error decomposition as classical analysis for least sqaures regularization [9] [11] is conducted. Truncate techni- que is introduced for handling unbounded setting, and Bennett concentration inequality is used for the sample error. By the above analysis we finally get the error bound and learning rate.
However, our work only considers the ERM algorithm. It is neccesary for us to extend this to the regulari- zation algorithms which are more widely used in practice. A more recent relative reference can be found in [21] . Another interesting topic in future study is dependent sampling [7] .
Cite this paper
Weilin Nie,Cheng Wang, (2016) Error Analysis of ERM Algorithm with Unbounded and Non-Identical Sampling. Journal of Applied Mathematics and Physics,04,156-168. doi: 10.4236/jamp.2016.41019
References
- 1. Cucker, F. and Zhou, D.X. (2007) Learning Theory: An Approximation Theory Viewpoint. Cambridge University Press, Cambridge.
http://dx.doi.org/10.1017/CBO9780511618796 - 2. Cucker, F. and Smale, S. (2002) On the Mathematical Foundations of Learning. Bulletin of the American Mathematical Society, 39, 1-49.
- 3. Dehling, H., Mikosch, T. and Sorensen, M. (2002) Empirical Process Techniques for Dependent Data. Birkhauser Boston, Inc., Boston.
http://dx.doi.org/10.1007/978-1-4612-0099-4 - 4. Steinwart, I., Hush, D. and Scovel, C. (2009) Learning from Dependent Observations. Journal of Multivariate Analysis, 100, 175-194.
- 5. Steinwart, I. and Christmann, A. (2009) Fast Learning from Non-i.i.d. Observations. In: Bengio, Y., Schuurmans, D., Lafferty, J.D., Williams, C.K.I. and Culotta, A., Eds., Advances in Neural Information Processing Systems 22, Curran and Associates, Inc., Yellowknife, 1768-1776.
- 6. Xiao, Q.W. and Pan, Z.W. (2010) Learning from Non-Identical Sampling for Classification. Advances in Computational Mathematics, 33, 97-112.
- 7. Pan, Z.W. and Xiao, Q.W. (2009) Least-Square Regularized Regression with Non-i.i.d. Sampling. Journal of Statistical Planning and Inference, 139, 3579-3587.
- 8. Hu, T. and Zhou, D.X. (2009) Online Learning with Samples Drawn from Non-identical Distributions. Journal of Machine Learning Research, 10, 2873-2898.
- 9. Wu, Q., Ying, Y. and Zhou, D.X. (2006) Learning Rates of Least-Square Regularized Regression. Foundations of Computational Mathematics, 6, 171-192.
- 10. Capponnetto, A. and De Vito, E. (2007) Optimal Rates for the Regularized Least Squares Algorithm. Foundations of Computational Mathematics, 7, 331-368.
- 11. Wang, C. and Zhou, D.X. (2011) Optimal Learning Rates for Least Squares Regularized Regression with Unbounded Sampling. Journal of Complexity, 27, 55-67.
- 12. Guo, Z.C. and Zhou, D.X. (2013) Concentration Estimates for Learning with Unbounded Sampling. Advances in Computational Mathematics, 38, 207-223.
- 13. He, F. (2014) Optimal Convergence Rates of High Order Parzen Windows with Unbounded Sampling. Statistics & Probability Letters, 92, 26-32.
- 14. Zhou, D.X. (2002) The Covering Number in Learning Theory. Journal of Complexity, 18, 739-767.
- 15. Zhou, D.X. (2003) Capacity of Reproducing Kernel Spaces in Learning Theory. IEEE Transactions on Information Theory, 49, 1743-1752.
- 16. Zhou, D.X. (2008) Derivative Reproducing Properties for Kernel Methods in Learning Theory. Journal of Computational and Applied Mathematics, 220, 456-463.
- 17. Smale, S. and Zhou, D.X. (2009) Online Learning with Markov Sampling. Analysis and Applications, 7, 87-113.
- 18. Smale, S. and Zhou, D.X. (2003) Estimating the Approximation Error in Learning Theory. Analysis and Applications, 1, 17-41.
- 19. Wang, C. and Guo, Z.C. (2012) ERM Learning with Unbounded Sampling. Acta Mathematica Sinica, English Series, 28, 97-104.
- 20. Bennett, G. (1962) Probability Inequalities for the Sum of Independent Random Variables. Journal of the American Statistical Association, 57, 33-45.
- 21. Cai, J. (2013) Coefficient-Based Regression with Non-Identical Unbounded Sampling. Abstract and Applied Analysis, 2013, Article ID: 134727.
http://dx.doi.org/10.1155/2013/134727
NOTES

*This work is supported by NSF of China (Grant No. 11326096, 11401247), Foundation for Distinguished Young Talents in Higher Education of Guangdong, China (No. 2013LYM 0089), Doctor Grants of Huizhou University (Grant No. C511.0206) and NSF of Guangdong Province in China (No. 2015A030313674).
#Corresponding author.