Wireless Engineering and Technology
Vol.5 No.3(2014), Article ID:47762,9 pages
DOI:10.4236/wet.2014.53006
Demonstration of Automatic Impedance-Matching and Constant Power Feeding to and Electric Helicopter via Magnetic Resonance Coupling
Masato Yamakawa1, Kohei Shimamura2, Kimiya Komurasaki3, Hiroyuki Koizumi4
1Department of Aeronautics and Astronautics, The University of Tokyo, Tokyo, Japan
2Department of Engineering Mechanics and Energy, University of Tsukuba, Ibaraki, Japan
3Department of Advanced Energy, The University of Tokyo, Chiba, Japan
4Research Center for Advanced Science and Technology, The University of Tokyo, Tokyo, Japan
Email: shimamura@kz.tsukuba.ac.jp
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

![]()

Received 7 April 2014; revised 18 May 2014; accepted 2 June 2014
ABSTRACT
Wireless power transfer (WPT) from a transmitter resonator on the ground to an electrically powered miniature heli-copter was attempted to demonstrate WPT using magnetic resonance coupling to an object moving in 3D space. The transmission efficiency was optimized by automatic impedance matching for different flight attitudes: a maximum flight altitude of 590 mm was achieved. Furthermore, an estimation method of transmission efficiency using only the properties on the transmitter side was proposed, with transmission power regulated as constant against the change in the coupling coefficient.
Keywords:Wireless Power Transfer, Power Regulation, Resonator, Flying Object

1. Introduction
Since wireless power transfer (WPT) was proposed by Nikola Tesla, WPT applications have increasingly attracted interest. Types of WPT are categorized as radiative and non-radiative forms, such as microwaves, lasers, electromagnetic induction, and magnetic resonance coupling (MRC). Earlier research shows that WPT via MRC has the considerably higher transmission efficiency than microwave transmission at the same distance as the transmission coil diameter. In 2007, an MIT group demonstrated WiTricity, the first MRC system, which conducted 1 m distance transmission with 90% efficiency [1] [2] . That year, the Nevada Lightning Laboratory achieved 800 W power transfers over 5 m distance [3] . In 2009, Sony group achieved long-distance transmission with a relay coil between the resonators [4] . The benefits of MRC include the considerable practical applications of WPT to electric vehicles. Recently, interest has also arisen in MRC applications for mobile devices. In 2009, Qualcomm demonstrated a wireless charging technology for eZONE mobile devices [5] . A WPT demonstration for stationary devices was conducted. However, many difficulties persist in transmission for moving objects.
To develop WPT technology that is applicable to mobile devices, it is first necessary to manufacture a small, light, and highly efficient receiver for use with the transmission system. Furthermore, automatic impedancematching and load-power control systems are needed because the relative positions of the transmitter and receiver coils can change. For an impedance matching technique, some researchers have used a circuit with a tuning capacitor and inductor, controlling several condensers in the circuit [6] .
For our previous study, a small helicopter with a light-receiving resonator (3.8 g) was developed using a resonance frequency ω of 40.68 MHz [7] . A four-coil system comprising an excitation coil, transmitter resonator coil, receiver resonator coil, and pickup coil was adopted. Its transmission efficiency of 50% was achieved by one-side impedance matching and 100 mm altitude flight. Impedance was controlled on the transmitter side by adjusting the distance between the excitation coil and the transmitter resonator, avoiding the changes in its resonant frequency. However, to minimize the receiver weight on the helicopter, impedance on the receiver side was not matched.
For this study, a flight attitude of 590 mm was achieved by optimizing the transmitter designing. In addition, a method for estimating the transmission efficiency was proposed to maintain the transmission power as constant against the change in the coupling coefficient.
2. Sizing of Resonator and Coils
To achieve a higher flight altitude than that reported from an earlier study, the transmission system was redesigned. An open-source software package of moment method, 4NEC2, was used to estimate the coupling coefficient between the coils [8] . According to this software, the relation between the total length of coil lc and wavelength λ is expected to satisfy λ/lc < 0.15. However, it is difficult to satisfy this relation at ω = 40.68 MHz. Therefore, ω was changed to 13.56 MHz. The transmitter resonator was enlarged to 600 mm diameter while the receiver size remained the same. The method of one-side impedance matching on the transmitter side was the same as that used in our previous study [7] . A vector network analyzer (MS2035B; Anritsu Corp.) with a calibration material (3750R; Anritsu Corp.) was used to measure the reflected power. Table 1 presents resonator specifications. The skin depth at this frequency is about 0.02 mm in copper. Thereby, a copper tube with a 5-mm cross-sectional radius was used for a transmitter resonator. A copper-foil tube was use for a receiver resonator to minimize weight. The receiver resonator was a square of 110 mm × 110 mm weighing 3.11 g. The equivalent diameter DR of a circular resonator is the same as that of 124 mm rectangular resonator. Because the voltage in the excitation coil and the resonator increases rapidly with the transmission distance, open-type coils were used as the excitation coil and the transmitter resonators. DT is the transmitter resonator diameter, which is an open spiral coil like that shown in Figure 1. Transmission power PT was set to about 5 W, which is 25% of the nor

Table 1. Specifications of the resonators.
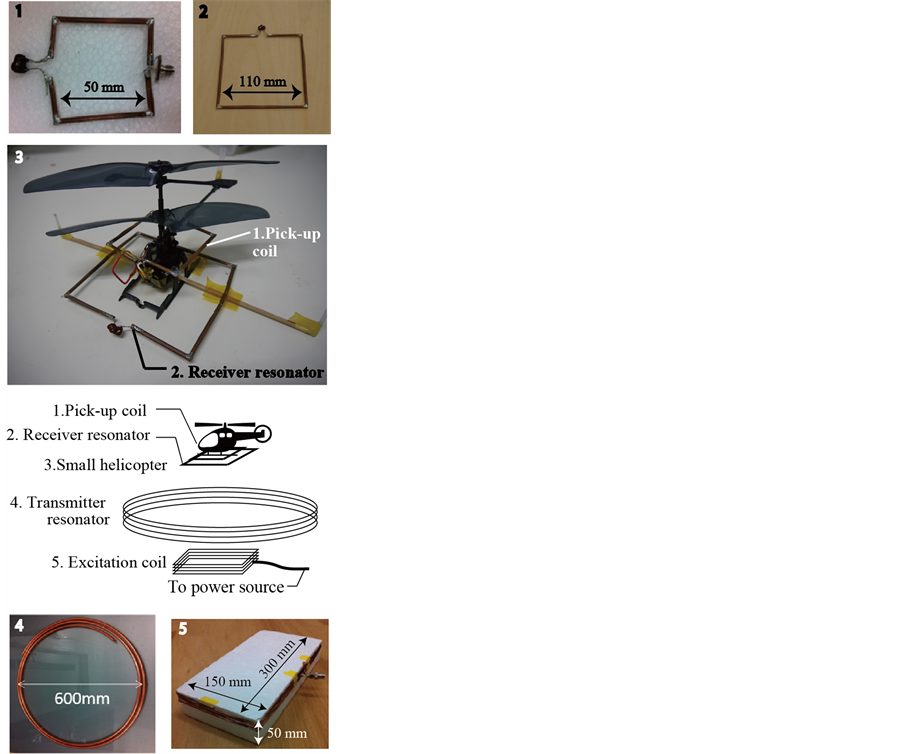
Figure 1. Wireless power transfer system for the small helicopter.
mal rated power of the helicopter’s motor. The nominal transmission distance l was
set at 550 mm, which is twice as large as the average resonator diameter
![]() of 1930 mm. Here the non-dimensional distance l' is introduced as
of 1930 mm. Here the non-dimensional distance l' is introduced as
 (1)
(1)
The optimum impedance ratio rT is a function of QT, QR, rR, and the coupling-coefficient k as
 (2)
(2)
where Q is a quality factor defined as Q = ωL/R. Subscripts T and R respectively denote the transmitter side and receiver side. Impedance ratios rT and rR are defined respectively as rT = Zsrc/RT and rT = Zload/RR. Subscripts src and the load respectively denote the power source and external load. At l = 0, k approaches unity and rT,opt increases to 37. In preliminary testing, the impedance ratio of transmission side rT was measured to confirm that the excitation coil can satisfy Equation (2). rT is tunable by adjusting the coupling coefficient between the excitation coil and the transmitter resonator kET, as [9]
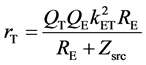 (3)
(3)
Subscript E denotes the excitation coil. To design the excitation coil, the voltage and the current between the excitation coil and the transmitter resonator were analyzed using LTspice [10] . Table 2 presents excitation coil specifications. A pick-up coil was made of a copper-foil tube that was the same as the receiver resonator. The helicopter load resistance was assumed as 5 Ω at PT = 5 W. In this study, the receiver impedance was matched at l = 500 mm and fixed. Here, kET was measured in the same manner as k. Figure 2 portrays the measured impedance ratio on the transmitter side as a function of distance between the centers of respective coil. Results show that rT satisfied the relation of Equation (2) within the movable range of the coil. Finally, Figure 3 presents the
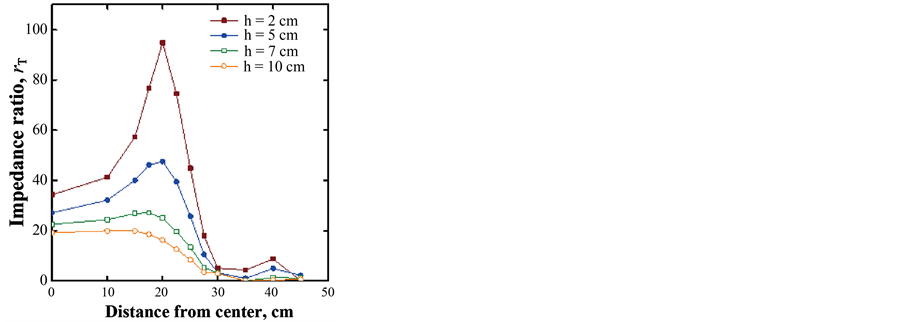
Figure 2. Measured rT on the transmitter side as a function of distance between the centers of each coil.
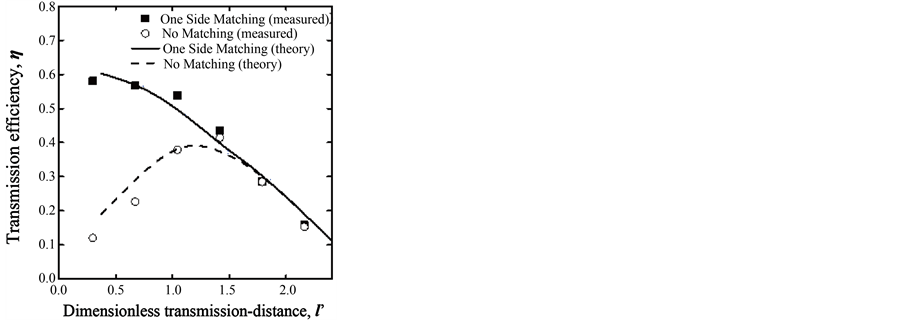
Figure 3. Measured and computed η with and without impedance matching as a function of dimensionless transmission-distance l'.
Table 2. Specifications of the pick-up and excitation coil.
measured and computed power transmission efficiency η with and without impedance matching as a function of l'. Measured values showed good agreement with the computed values. In addition, the present transmission system achieved high transmission efficiency in the low-altitude region up to 45% by appropriate impedance matching.
3. Flight Demonstration of a Toy Helicopter
3.1. Impedance Matching by Power-Reflection Monitoring
Without impedance matching, η has a peak around the designed nominal altitude. It is difficult for the helicopter to hover at a certain altitude where η increased with l'. In this sense, impedance matching is unavoidable for the helicopter to conduct a safe liftoff and landing. rT,opt was obtained by minimizing the reflection power PR. This control method is extremely simple.
3.2. Experimental Setup
A small electric helicopter with the receiver system was used in the same manner as in our previous study. As Figure 1 shows, the receiver system consists of a receiver resonator, a pick-up coil and a diode-bridge rectifier circuit. Figure 4 and Figure 5 respectively show the automatic impedance-matching system and the control flow diagram. Input power and reflected power are monitored and sent as a reference signal to a microcomputer (H8-3694F; Renesas Electronics Corp.), which controls the actuator. At several connection points where DC current flows, RC low-pass filters were used to remove the high-frequency noise. The pulse-width modulation
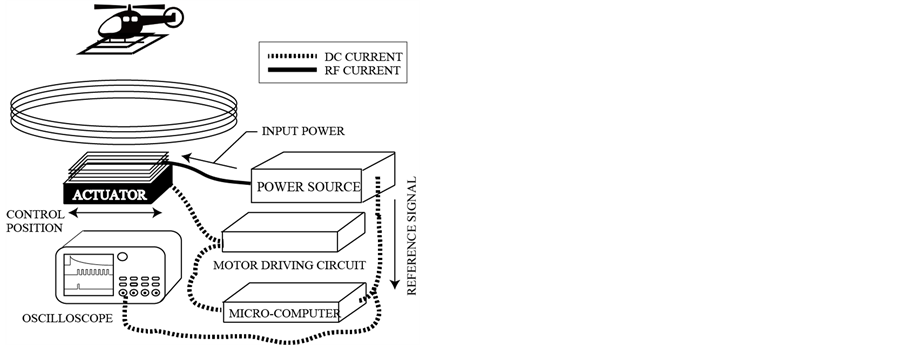
Figure 4. Automatic impedance-matching system for a flight demonstration.
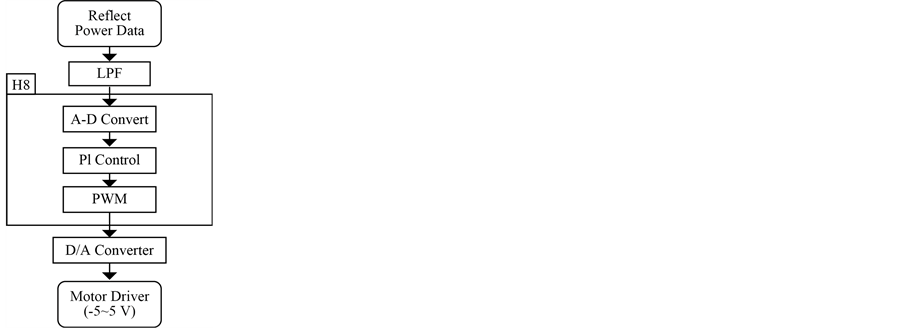
Figure 5. Flow of the automatic-control system.
(PWM) signal is sent from the micro-computer to the actuator via a motor-driver circuit. An RF power source (T161-5613 HA; Thamway, Corp.) with maximum power of 400 W and RF frequency of 13.56 MHz was used. It enables us to monitor the input and the reflection as well as external control of the output power.
3.3. Results
As Figure 6 shows, the helicopter reached 590 mm and showed flight with impedance matching. This altitude was higher than the 500 mm designed distance. Without impedance matching hovering was difficult. Figure 7 shows the history of reflected power before and after impedance matching. At t = 0 s, PT = 8 W and PR = 3 W. The excitation coil position was out of control. When impedance matching started at 10 s, PR was 0.2 W.
4. Constant Power Feeding Demonstration
4.1. Method of η Estimation
When rR is given, η can be estimated using parameters on the transmitter side. Considering the energy losses in excitation and pickup coils, k is expressed as
 (4)
(4)
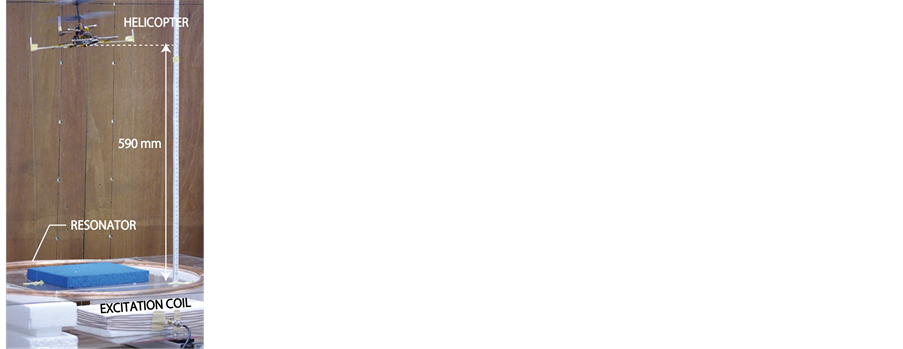
Figure 6. Automatic impedance-matching system for a flight demonstration.
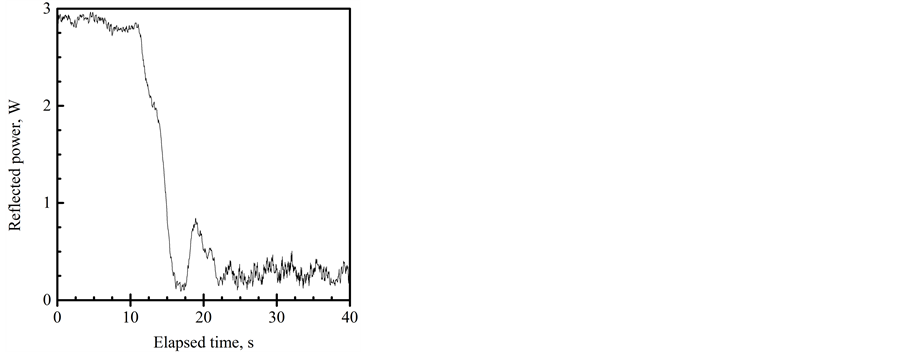
Figure 7. History of reflection power. At t = 10 s impedance matching started.
where
 and where
and where . The subscript load denotes the load of the light
bulb. k is expressed with
. The subscript load denotes the load of the light
bulb. k is expressed with
![]() as
as
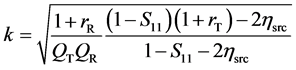 . (5)
. (5)
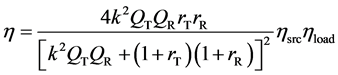
Substituting Equation (5) into Equation (4), η yields
 (6)
(6)
Actually, ηload is usually approximately unity. Also ηsrc and rT are given. Consequently, η can be estimated by monitoring and rT and S11.
4.2. Experimental Setup
Figure 8 portrays the constant power supply demonstration system. The reference signals of the input and reflected power sent to the microcomputer were used to estimate the transmission efficiency. The microcomputer was the same as that used in the flight demonstration. However, it was used not for impedance matching but for input power regulation from the power source to maintain 10 W at the light bulb in this demonstration. Figure 9 shows a schematic of the pick-up coil and the rectifier circuit. Table 3 shows the pick-up coil and the resonator specifications. A light bulb with rated power consumption of 10 W was used as the load on the receiver system. The constant power was demonstrated where RT and RR were pre-optimized at l = 300 mm. The measured impedance ratio rR was 9.0.
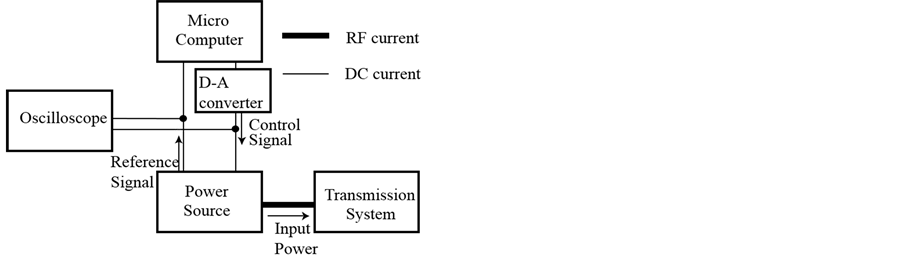
Figure 8. Constant power-feeding demonstration system.
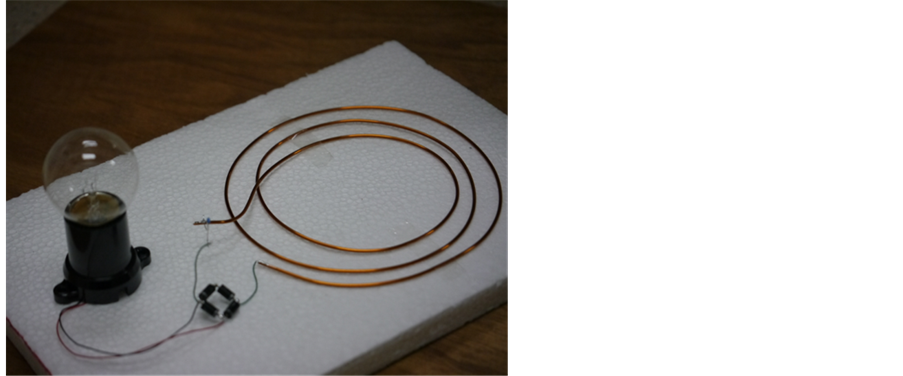
Figure 9. Pick-up coil with the rectifier circuit and the light bulb.
4.3. Results
As Figure 10 shows, with the power control, the light bulb became bright from l = 0 mm to 300 mm. It was not bright at l = 0 mm without the power control. Figure 11 portrays the theoretical and estimated transmission efficiency η and S11 during the demonstration. Estimated η agreed well with theoretical η within 10% error. Figure 12 shows the incident power and power consumption during the demonstration. As Figure 12 shows, power consumption was regulated to approximately 10 W. Results show that it is possible to supply constant power with η estimation.
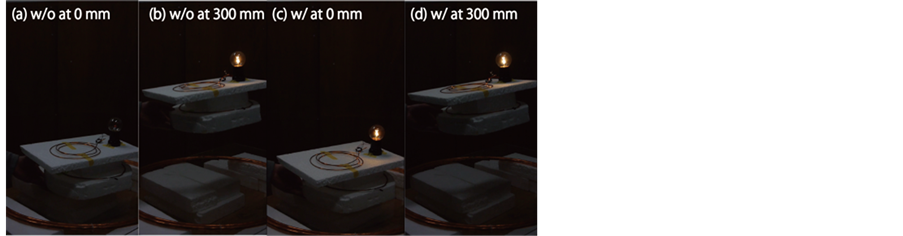
Figure 10. Pick-up coil and light bulb with ((a), (b)) and without ((c), (d)) power control.
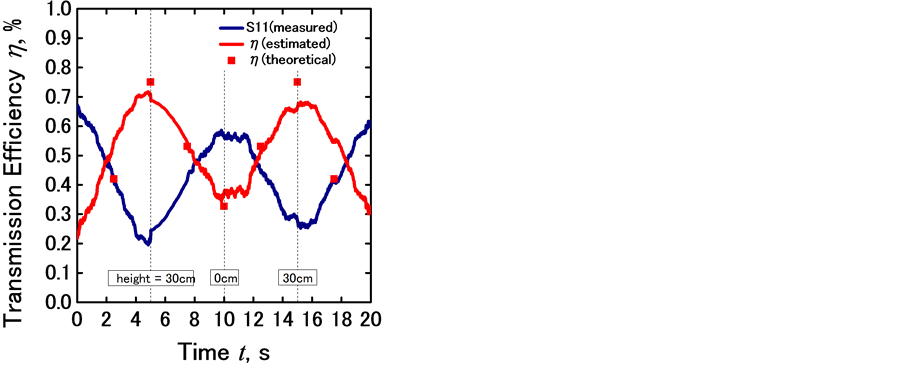
Figure 11. Estimated and theoretical transmission efficiency without power control. l changed from 600 mm to 0 mm in 10 s and from 0 mm to 600 mm in next 10 s.
Table 3. Specifications of at the pick-up coil and a resonator.
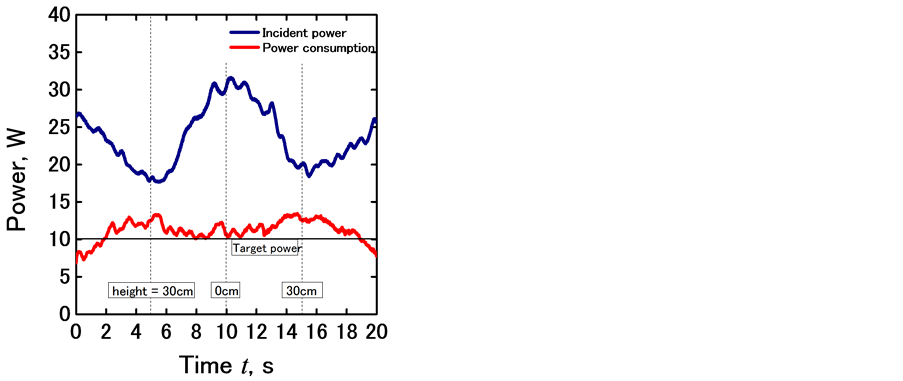
Figure 12. Incident power and power consumption with power control. l changed from 600 mm to 0 mm in 10 s and from 0 mm to 600 mm in next 10 s.
5. Conclusions
Automatic impedance matching with WPT to a small electric powered helicopter was
proposed and demonstrated. Results show that the power transmission efficiency was
improved up to 45% in the high k region. The flight altitude of 590 mm was achieved
with the average resonator diameter
![]() = 1930 mm.
= 1930 mm.
Furthermore, the transmission efficiency estimation method was proposed using only the properties on the transmitter side. By sliding a light bulb from 0 mm to 600 mm distant from the transmitter resonator, a constant power supply of the power of 10 W was demonstrated.
References
- Kurs, A., Joannopoulos, J.D. and Soljacic, M. (2008) Efficient Wireless Non-Radiative Mid-Range Energy Transfer. Annals of Physics, 323, 34-48. http://dx.doi.org/10.1016/j.aop.2007.04.017
- Kurs, A., Karalis, A., Moffatt, R., Joannopoulos, J.D., Fisher, P. and Soljacic, M. (2007) Wireless Power Transfer via Strongly Coupled Magnetic Resonance. Science, 317, 83-86. http://dx.doi.org/10.1126/science.1143254
- http://www.lightninglab.org/
- Hashiguchi, T., Komiyama, S., Mita, H. and Fujimaki, K. (2010) Passive Extender for Wireless Power Transmission Using Magnetic Resonances. IEICE, B-1-25.
- http://www.qualcomm.com/media/releases/2010/02/12/qualcomm-demonstrates-evolution-wireless-mobile-computing-applications-and
- Beh, T.C., Kato, M., Imura, T., Oh, S. and Hori, Y. (2013) Automated Impedance Matching System for Robust Wireless Power Transfer via Magnetic Resonance Coupling. IEEE Transactions on Industrial Electronics, 60, 3689-3698.http://dx.doi.org/10.1109/TIE.2012.2206337
- Koizumi, M., Komurasaki, K., Mizuno, Y. and Arakawa, Y. (2012) Wireless Power Feeding with Strongly Coupled Magnetic Resonance for a Flying Object. Wireless Engineering and Technology, 3, 86-89.http://dx.doi.org/10.4236/wet.2012.32014
- Smith, J.L. (2008) Basic NEC with Broadcast Applications. Focal Press, Waltham.
- Komaru, T., Koizumi, M., Komurasaki, K., Shibata, T. and Kano, K. (2011) Compact and Tunable Transmitter and Receiver for Magnetic Resonance Power Transmission to Mobile Objects. In: Kim, K.Y., Ed., Wireless Energy Transfer Based on Electromagnetic Resonance: Principles and Engineering Explorations, In Tech, Rijeka, 133-150.
- http://www.linear.com/designtools/software/#LTspice